Biomechanics of Movement
advertisement

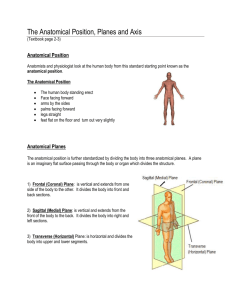
Chapter 3 Kinesiology of the musculoskeletal system Overview A fundamental skill of the physical therapist is to identify, analyze and solve problems related to human movement Anatomical reference point When describing movements it is necessary to have a starting position as the reference position. This starting position is referred to as the anatomical reference position. The anatomical reference position for the human body is described as the erect standing position with the feet just slightly separated and the arms hanging by the side, the elbows straight and with the palms of the hand facing forward Directional Terms Superior or cranial – Closer to the head Inferior or caudal – Closer to the feet Anterior or ventral – Toward the front of the body Posterior or dorsal – Toward the back of the body Medial – Toward the midline of the body Lateral – Away from the midline of the body Directional Terms Proximal – Closer to the trunk Distal – Away from the trunk Superficial – Toward the surface of the body Deep – Away from the surface of the body in the direction of the inside of the body Planes of the Body There are three traditional planes of the body corresponding to the three dimensions of space: sagittal, frontal, and transverse Sagittal plane. Also known as the anterior-posterior or median plane. Divides the body vertically into left and right halves of equal size Frontal plane. Also known as the lateral or coronal plane. Divides the body equally into front and back halves Transverse plane. Also known as the horizontal plane. Divides the body equally into top and bottom halves The Center and Line of Gravity The center of gravity may be defined as ‘the point at which the three planes of the body intersect each other’ The line of gravity is defined as ‘the vertical line at which the two vertical planes intersect each other’ Axes of the Body Three reference axes are used to describe human motion: frontal, sagittal, and longitudinal. The axis around which the movement takes place is always perpendicular to the plane in which it occurs. Axes of the Body Frontal. The frontal axis, also known as the transverse axis, is perpendicular to the sagittal plane Sagittal. The sagittal axis is perpendicular to the frontal plane Longitudinal. The longitudinal axis, also known as the vertical axis is perpendicular to the transverse plane The planes and axes for common movements Flexion, extension, hyperextension, dorsiflexion, and plantar flexion occur in the sagittal plane around a frontal-horizontal axis Abduction, adduction; side flexion of the trunk; elevation and depression of the shoulder girdle; radial and ulnar deviation of the wrist; eversion and inversion of the foot occur in the frontal plane around a sagittalhorizontal axis The planes and axes for common movements Rotation of the head, neck and trunk; internal rotation and external rotation of the arm or leg; horizontal adduction and abduction of the arm or thigh; pronation and supination of the forearm occur in the transverse plane around the longitudinal axis Circumduction involves an orderly sequence of circular movements that occur in the sagittal, frontal and intermediate oblique planes, so that segment as a whole incorporates a combination of flexion, extension, abduction and adduction Kinematics Kinematics is the study of motion. In studying joint kinematics, two major types of motion are involved: – The osteokinematic – The arthrokinematic Osteokinematic Motion Osteokinematic motion occurs when any object forms the radius of an imaginary circle about a fixed point The axis of rotation for osteokinematic motions is oriented perpendicular to the plane in which the rotation occurs Osteokinematic motion Examples of osteokinematic motion include abduction or adduction of the arm, flexion of the hip or knee, and side flexion of the trunk Arthrokinematic Motion Arthrokinematic movements are the motions occurring at the joint surfaces Direction of movement based on the shape of the joint surfaces Generally, joint surfaces can be either concave (female) or convex (male) in shape (ovoid), or a combination of both shapes (sellar) Arthrokinematic Motion The three types of movement occur at the articulating surfaces: – Roll – Slide – Spin Motion relationships Osteokinematic and arthrokinematic motions are directly proportional to each other and one cannot occur completely without the other Thus, if motion is reduced, one, or both, of these motions is at fault Degrees of Freedom The number of independent modes of motion at a joint is called the degrees of freedom (DOF) – A joint that can swing in one direction or can only spin, it is said to have 1 DOF. Example: PIP joint – A joint that can spin and swing in one way only or it can swing in two completely distinct ways, but not spin, it is said to have 2 DOF. Example: Tibiofemoral joint Degrees of Freedom If the joint can spin and also swing in two distinct directions then it is said to have 3 DOF . Example: Glenohumeral joint Conjunct Rotation The rotation at a joint that accompanies the prime motion. Example: supination of the forearm during elbow extension Conjunct rotation is only under volitional control in joints with 3 DOF Conjunct rotation Where appropriate, mobilizing techniques must take into consideration both the relative shapes of the articulating surfaces, in addition to the conjunct rotation that is associated with a particular motion Kinematic chains The expression kinematic chain is used in rehabilitation to describe the function or activity of an extremity or trunk in terms of a series of linked chains Kinematic chains Closed kinematic chain – Various definitions – Fixation of the distal segment so that joint motion takes place in multiple planes and the limb is supporting weight Kinematic chains Open kinematic chain – All activities that involve the end segment of an extremity moving freely through space Close-packed Position The position of maximum congruity of the opposing joint surfaces is termed the close-packed position of the joint Movements toward the close-packed position of a joint involve an element of joint compression Position of maximum joint stability Open-packed Position The position of least joint congruity is termed the open-packed position Movements away from the closepacked position involve an element of joint distraction Position of least joint stability Available Joint Motion If a joint moves less than what is considered normal, or when compared to the same joint on the opposite extremity, it may be deemed hypomobile A joint that moves more than considered normal, or when compared to the same joint on the opposite extremity, may be deemed hypermobile. Available Joint Motion Instability of a joint involves a disruption of the osseous and ligamentous structures of that joint, resulting in a loss of function Factor of joint integrity, elastic energy, passive stiffness, and muscle activation