Related Lecture given at Boulder Fluid Dynamics Seminar (these
advertisement

Ocean Ecosystem Model Parameter Estimation in a
Bayesian Hierarchical Model (BHM)
Ralph F. Milliff; CIRES, University of Colorado
Jerome Fiechter, Ocean Sciences, UC Santa Cruz
Christopher K. Wikle, Statistics, University of Missouri
Radu Herbei, Statistics, Ohio State Univ.
Bill Leeds, Statistics, Univ. Chicago
Andrew M. Moore, Ocean Sciences, UC Santa Cruz
Zack Powell, Biology, UC Berkeley
Mevin Hooten, Wildlife Ecology, Colorado State Univ.
L. Mark Berliner, Statistics, Ohio State Univ.
Jeremiah Brown, Principal Scientific
ATOC Ocean Seminar and Boulder Fluid Dynamics Seminar Sep-Oct 2013
Goal: differentiate and identify ocean ecosystem model parameters that can
“learn” from data
Challenges: model is a significant abstraction of ocean ecosystem dynamics
large number of correlated parameters
disproportionate parameter amplitudes (gain)
very few data; obs for (at most) 2 state variables, 0 parameters
Methods: BHM in large state-space, geophysical fluid systems
Adaptive Metropolis-Hastings sampling MCMC
“pseudo-data” from ensemble, coupled, forward model calculations
Outline
•
•
•
•
•
•
•
what is a BHM?
the NPZDFe BHM for the CGOA
failure in a straight-forward application
(crudely) incorporate upper ocean physics
guide experimental design and model validation with ROMS-NPZDFe
(limited) success
summary
Bayesian Hierarchical Models (BHM)
Bayes theorem:
Posterior Distribution (“Posterior Mean”)
- spread quantifies uncertainty (MCMC distributions)
Data Stage Distribution (“Likelihood”)
- e.g., satellite observations, in situ measurements
Process Model Stage Distribution (“Prior”)
- NPZD, NEMURO + Error Models
Parameter Distributions
- fixed vs. random parameters
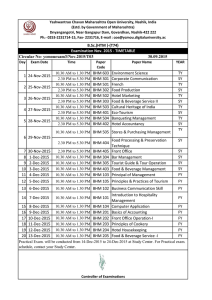
Ensemble surface winds in the Mediterranean Sea from a BHM
data stage: ECMWF surface winds and SLP, QuikSCAT winds
process model: Rayleigh Friction Equations (leading order terms)
Posterior Distribution: Snapshot depicts posterior mean and 10 realizations
•
•
(x,t) variability in distributions
Wind-Stress Curl (WSC) implications for ocean forcing
Milliff, R.F., A. Bonazzi, C.K. Wikle, N.Pinardi and L.M. Berliner, 2011: Ocean Ensemble Forecasting, Part 1: Ensemble Mediterranean Winds
from a Bayesian Hierarchical Model. Quarterly Journal of the Royal Meteorological Society, 137, Part B, 858-878, doi: 10.1002/qj.767
Pinardi, N., A. Bonazzi, S. Dobricic, R.F. Milliff, C.K. Wikle and L.M. Berliner, 2011: Ocean Ensemble Forecasting, Part 2: Mediterranean
Forecast System Response. Quarterly Journal of the Royal Meteorological Society, 137, Part B, 879-893, doi: 10.1002/qj.816.
BHM Example – CGOA NPZD+Fe, In Situ Observations
GLOBEC in situ
Observations
NO3, Chlorophyll
Seward Line
April, May, and July
Posterior Distributions
1-D NPZD + Iron
In situ Zgraze inner shelf
(0.4-0.6)
No physical processes
Short wave radiation
Single locations in CGOA
(inner, mid, and outer shelf)
Unif(0.1,1.0)
initially
NPZD Parameter Estimation BHM in the Coastal Gulf of Alaska
O
O
O
O
Seward Line
O
O
O
Kodiak Line
O
O
Shumagin Line
Data Stage Inputs
Seward Line: IS, OS, offshore
Kodiak Line: IS, OS, offshore
Shumagin Line: IS, OS, offsh.
Observations: GLOBEC + SeaWiFS
Observations: SeaWiFS only
Observations: SeaWiFS only
Seward Line (GLOBEC station) in the Coastal Gulf of Alaska
Fiechter, J., R. Herbei, W. Leeds, J. Brown, R. Milliff, C. Wikle, A. Moore and T. Powell, 2013: A Bayesian parameter estimation
method applied to a marine ecosystem model for the coastal Gulf of Alaska., Ecological Modelling, 258, 122‐133.
Fiechter, J., 2012: Assessing marine ecosystem model properties from ensemble calculations., Ecological Modelling, 242, 164‐179.
Milliff, R.F., J. Fiechter, W.B. Leeds, R. Herbei, C.K. Wikle, M.B. Hooten, A.M. Moore, T.M. Powell and J.L. Brown, 2013: Uncertainty
management in coupled physical-biological lower-trophic level ocean ecosystem models., Oceanography (GLOBEC Special
Issue in preparation).
NPZDFe (prior):
N
P
Z
D
Fe
NPZDFe Parameters (random and fixed)
Parameter Name
PhyIS
VmNO3
KNO3
KFeC
ZooGR
DetRR
FeRR
Light
Light extinction coefficient
Self-shading coefficient
Phytoplankton
Initial slope of P-I curve (PhyIS)
Maximum uptake rate (VmNO3)
Nitrogen half-saturation constant
Half-saturation for [Fe:C] (KFeC)
Empirical [Fe:C] power
Empirical [Fe:C] coefficient
Iron uptake time scale
Mortality
Zooplankton
Maximum grazing rate (ZooGR)
Ivlev constant
Excretion efficiency
Mortality
Remineralization
Detritus remin. rate (DetRR)
Detritus sinking
Iron remin. fraction (FeRR)
Symbol
Value
Units
kz
kp
0.067
0.04
m-1
m2 mmolN-1
α
Vm
kN
σd
0.02
0.8
1.0
16.9
0.6
64
1.0
0.1
m2 W-1
day-1
mmolN m-3
mmolFe (molC)-1
nondimensional
(mmolC m-3)-1
day
day-1
Rm
Λ
γn
ζd
0.4
0.84
0.3
0.145
day-1
nondimensional
nondimensional
day-1
δ
wd
0.2
8.0
0.5
day-1
m day-1
nondimensional
kFe
a
b
tFe
frem
Table 2. Parameter names, symbols, values, and units for the 1-D NPZDFe model. Parameters
treated as random in the BHM framework are indicated in bold italics (i.e., PhyIS, VmNO3,
ZooGR, DetRR, KFeC, FeRR).
Gibbs-Sampler Algorithm: embedded M-H step
0) ini alize
1) Sample from Parameter Proposal Distribu ons
2) Generate State Proposal
4) Metropolis-Has ngs Step
5a) accept state proposal
6a) Augment Posterior Distribu on
for State and Parameters with
Proposal Values
3) Data Stage Inputs
(State variable Obs)
5b) reject state proposal
6b) Augment Posterior Distribu on
for State and Parameters with
Previous Values
7) repeat
straight-forward, 7 parameter BHM failed
add discrete vertical process analog to prior, reduce to 2 key parameters
validate with synthetic data
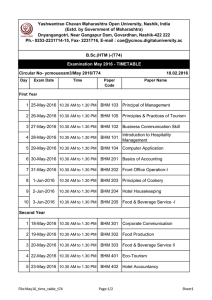
“Perfect” data experiments to validate the NPZDFe BHM:
•
•
•
data stage inputs from ROMS assimilation run at Seward inner shelf location (2001)
BHM includes a model error term but no dynamical terms
ROMS state variable data not sufficient to set seasonal bloom clock
N (t,z)
P (t,z)
level
level
10
10
20
20
30
Model
day
30
Model
day
Model Error
Model Error
Sum
Sum
Data
Data
μmol N m-3
μmol N m-3
“Perfect” data experiments to validate the NPZDFe BHM:
•
•
•
data stage inputs from ROMS assimilation run at Seward inner shelf location (2001)
BHM includes a model error term but no dynamical terms
ROMS state variable data not sufficient to set seasonal bloom clock
N (t,z)
P (t,z)
level
level
10
10
20
20
30
Model
day
30
Model
day
Model Error
Model Error
Sum
Sum
Data
Data
μmol N m-3
μmol N m-3
NPZDFe (prior):
N
P
Z
D
Fe
NPZDFe with Vertical Mixing (prior):
N
P
Z
D
Fe
Simulated Data from Hi-Fidelity, Data Assimilative, Deterministic Model
ROMS-NPZDFe
Fiechter, J., A.M. Moore, 2012 Iron limitation impact on eddy-induced ecosystem variability in the coastal Gulf of Alaska
Journal Marine Systems, 92, pp. 1–15 http://dx.doi.org/10.1016/j.jmarsys.2011.09.012
SSH and Currents
Surface Chlorophyll
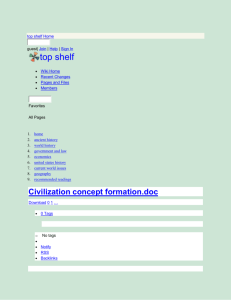
“Perfect” data experiment repeat with MLD dependent mixing term in prior
Seward line; inner shelf
ROMS
μmol N m-3
ROMS as GLOBEC
N(t,z)
P(t,z)
YEARDAY (2001)
GLOBEC
“Perfect” data experiment repeat with MLD dependent mixing term in prior
Seward line; outer shelf
ROMS
μmol N m-3
ROMS as GLOBEC
N(t,z)
P(t,z)
YEARDAY (2001)
GLOBEC
ROMS data (subsets thereof)
VmNO3
inner
shelf
ZooGR
VmNO3
outer
shelf
ZooGR
ROMS-NPZD Ensembles for shelf and basin (±50% range)
CONTROL
ENSEMBLE MEAN
SEAWIFS
1-D NPZD Ensembles for Seward IS and OS (±50% range)
ROMS-NPZD Ensembles: Parameter Control
May
Jul
Sep
Regress (normalized) model parameters on monthly-average surface chlorophyll
from SeaWiFS at each point in the ROMS-NPZDFe CGOA domain. Determine relative
importance, in space and time, of each parameter on surface P abundance.
Pn = a1θ1 + a2θ2 + a3θ3 + a4θ4 + a5θ5 + a6θ6 + a7θ7, n=1,…,N
where the θp, p=1,…,7; are the parameters to be treated as random variables in
the BHM, and N is the ensemble size (~50 members).
ROMS-NPZD Ensembles: Parameter Control
temporal (monthly average) regression coefficients
ROMS inserted at Globec and SeaWiFS locations
VmNO3
inner
shelf
ZooGR
VmNO3
outer
shelf
ZooGR
estimating 2 parameters from in-situ Globec stations and SeaWiFS (8d avg) data
VmNO3
inner
shelf
ZooGR
VmNO3
outer
shelf
ZooGR
Lessons Learned
• Realistic ecosystem solution for 1D NPZDFe BHM in CGOA requires vertical mixing
• nutrient replenishment in Winter
• stratification sets timing of Spring bloom
• Under-determination addressed with mixed probabilistic-deterministic approach
• BHM validation
• re-scope parameter identification experiment
• separate sampling from model limitations
EXTRAS
estimating 6 parameters; PhyIS, VmNO3, ZooGR, DetRR, KFeC, FeRR
inner
shelf
outer
shelf
(ROMS)
Ocean Ecosystem Model Parameter Estimation BHM Summary:
Science Perspective:
new approach to under-determination in biogeochem models
trade uncertainty for number of identifiable parameters
value-added for forward model ensemble
elucidate parameter correlations, space-time dependence
Zooplankton grazing and Nutrient uptake are identifiable in CGOA
given station data and Chl retrievals from ocean color sat obs
BHM Perspective:
sparse data
in-situ station data (biased by season)
ocean color/Chl data (biased by cloud cover)
too many (correlated) parameters (identifiability)
Metropolis-Hastings step required in Gibbs Sampler
low acceptance
synthetic Data from deterministic system
ROMS-NPZD+Fe to improve proposals
validate model and physical interpretations
EXPENSIVE
ROMS-NPZD Ensembles: Parameter Estimation
Experiment
Control
Shelf best
Basin best
Domain best
PhyIS
0.02
0.029
0.029
0.029
VmNO3
0.8
0.55
0.66
0.73
KNO3
1.0
0.81
1.32
0.92
ZooGR
0.4
0.42
0.28
0.34
DetRR
0.2
0.12
0.24
0.16
KFeC
16.9
24.79
22.40
21.76
FeRR
0.5
0.61
0.71
0.67
Review: Bayesian Hierarchical Models (BHM)
Probability Models:
Conditional thinking; [A,B,C] = [A | B,C] [B | C] [C], easier to specify conditional vs joint
Use what we know/willing to assume to simplify; e.g. [A | B,C] ∼ [A|B]
BHM Building Blocks:
Data Stage Distribution (likelihood) quantifies uncertainty in relevant observations,
e.g. measurement errors, quantifiable biases, etc. .... [D | X, θd ]
Process Model Stage Distribution (prior) quantifies uncertainty in (perhaps incomplete)
physics of process; e.g., [Xt+1 | Xt , θp ]
Parameter Distributions from Data Stage and Process Models (i.e. [θd], [θp] )
issues of identifiability, uncertainty, model validation
Bayes Theorem relates Data and Process Model Stages to the Posterior Distribution
[X,θp,θd|D] ∝ [ D|X,θd ] [X|θp] [θp] [θd]
BHM Posterior Distribution:
Obtained via Gibbs Sampler Algorithm, Markov Chain Monte Carlo
Distributional estimates of process (and parameters) given data e.g. [X,θd,θp|D]
Posterior mean is expected value
Standard deviation of posterior is an estimate of the spread
Cressie, N.A. and C.K. Wikle, 2011: Statistics for Spatio-Temoral Data, Wiley Series in Probability and Statistics, John Wiley and Sons, 588pgs
Bayesian Hierarchical Models (BHM)
Bayes theorem:
DATA
STAGE
Probability distribution of observations Y (e.g., SeaWiFS)
given the true process X (e.g., chlorophyll concentration)
True process is not known, but expected measurement
distribution can be characterized from measurements error
models
Parameters: interpolation operator, distribution variance, etc.
PROCESS
STAGE
Model approximation of true process X, converted from
continuous to stochastic formulation:
X(t) = F(X(t-1),θp) + εX(t)
where F might represent advection, diffusion, biological
source/sink terms, etc.
Parameters: vertical mixing coefficient, growth rates, etc.
MFS-Wind-BHM Summary:
BHM Perspective:
abundant data
satellite data contribute to density functions
far fewer random variables than d.o.f. in deterministic setting
full x,t modelling is more challenging
issues of identifiability
efficient Gibbs Sampler
full conditional distributions
estimating state variables
data stage inputs project directly on process
Science Perspective:
ensemble forecast methods
initial condition perturbations
efficient, balanced perturbations of important dependent variable fields
upper ocean forecast
emphasize uncertain part of forecast (ocean mesoscale)
Bayesian Emulators from Forward Model Ensemble:
Ancilary model Input γ
Forward Model
y i = f ( ✓i ; γ)
– Initial Boundary Conditions;
– “ Known” parameters.
Scientifically Plausible
Parameter Sets
{ ✓1, ✓2, . . . , ✓K }
Singular Value Decomposition
of Model Output Matrix
Y = [y1, . . . , yK ] = UDV
Model form for right
singular vect ors in
t erms of paramet ers
V ( ✓, β)
Statistical Model / Distribution
for Right Singular Vectors
in terms of parameters
[v | ✓, β̂]
Prior distribution for
model parameters ✓
[✓]
Model for Output given
Reduced Dimension Left Singular
˜ and Right
Vectors/ Values UD
Singular Vectors Model
˜ V(✓, β̂)]
[y | UD,
Data Model for
Observations of y
h
i
Dy | y
BHM: post erior dist ribut ion of process
and paramet ersZgiven observat ions
˜ , V ( ✓, β̂)] [v | ✓, β̂] [✓] dv
[y, ✓| D y , β̂] /
[D y | y] [y | UD
V
Leeds, W.B., C.K. Wikle and J. Fiechter, 2012: Emulator-assisted reduced-rank ecological data assimilation for nonlinear
multivariate dynamical spatio-temporal processes., Statistical Methodology,1, pg. 11 doi:10.1016/j.statmet.2012.11.004.
Emulated Phytoplankton: log(Chl)
time (in 8d epochs)
SeaWiFS
ROMS-NPZDFe
Posterior Mean
Uncertainty