Introduction - Communications Systems Center
advertisement

Parallelism
Lecture notes from MKP and S. Yalamanchili
Introduction
• Goal: Higher performance through parallelism
• Job-level (process-level) parallelism
High throughput for independent jobs
• Application-level parallelism
Single program run on multiple processors
• Multicore microprocessors
Chips with multiple processors (cores)
Support for both job level and application-level
parallelism
(2)
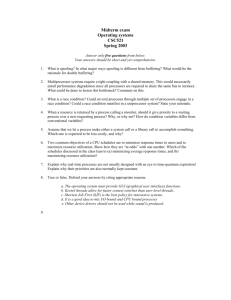
Core Count Roadmap: AMD
From anandtech.com
(3)
Core Count: NVIDIA
1536 cores at 1GHz
• All cores are not created equal
• Need to understand the programming model
(4)
Hardware and Software
• Hardware
Serial: e.g., Pentium 4
Parallel: e.g., quad-core Xeon e5345
• Software
Sequential: e.g., matrix multiplication
Concurrent: e.g., operating system
• Sequential/concurrent software can run on
serial/parallel hardware
Challenge: making effective use of parallel hardware
(5)
Parallel Programming
• Parallel software is the problem
• Need to get significant performance
improvement
Otherwise, just use a faster uniprocessor, since it’s
easier!
• Difficulties
Partitioning
Coordination
Communications overhead
(6)
Amdahl’s Law
• Sequential part can limit speedup
• Example: 100 processors, 90× speedup?
Tnew = Tparallelizable/100 + Tsequential
1
Speedup
90
(1 Fparalleliz able ) Fparalleliz able /100
Solving: Fparallelizable = 0.999
• Need sequential part to be 0.1% of original
time
(7)
Scaling Example
• Workload: sum of 10 scalars, and 10 × 10
matrix sum
Speed up from 10 to 100 processors
• Single processor: Time = (10 + 100) × tadd
• 10 processors
Time = 10 × tadd + 100/10 × tadd = 20 × tadd
Speedup = 110/20 = 5.5 (55% of potential)
• 100 processors
Time = 10 × tadd + 100/100 × tadd = 11 × tadd
Speedup = 110/11 = 10 (10% of potential)
• Idealized model
Assumes load can be balanced across processors
(8)
Scaling Example (cont)
• What if matrix size is 100 × 100?
• Single processor: Time = (10 + 10000) × tadd
• 10 processors
Time = 10 × tadd + 10000/10 × tadd = 1010 × tadd
Speedup = 10010/1010 = 9.9 (99% of potential)
• 100 processors
Time = 10 × tadd + 10000/100 × tadd = 110 × tadd
Speedup = 10010/110 = 91 (91% of potential)
• Idealized model
Assuming load balanced
(9)
Strong vs Weak Scaling
• Strong scaling: problem size fixed
As in example
• Weak scaling: problem size proportional to
number of processors
10 processors, 10 × 10 matrix
o
Time = 20 × tadd
100 processors, 32 × 32 matrix
o
Time = 10 × tadd + 1000/100 × tadd = 20 × tadd
Constant performance in this example
For a fixed size system grow the number of
processors to improve performance
(10)
What We Have Seen
• §3.6: Parallelism and Computer Arithmetic
Associativity and bit level parallelism
• §4.10: Parallelism and Advanced InstructionLevel Parallelism
Recall multi-instruction issue
• §6.9: Parallelism and I/O:
Redundant Arrays of Inexpensive Disks
• Now we will look at categories in computation
classification
(11)
Concurrency and Parallelism
• Each core can operate concurrently
and in parallel
• Multiple threads may operate in a
time sliced fashion on a single core
• Concurrent access to shared data must be
controlled for correctness
• Programming models?
Image from futurelooks.com
(12)
Instruction Level Parallelism (ILP)
Multiple instructions in
EX at the same time
IF
ID
MEM WB
• Single (program) thread of execution
• Issue multiple instructions from the same
instruction stream
• Average CPI<1
• Often called out of order (OOO) cores
(13)
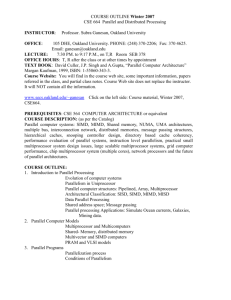
The P4 Microarchitecture
From, “The Microarchitecture of the Pentium 4 Processor 1,” G. Hinton et.al, Intel Technology Journal Q1, 2001
(14)
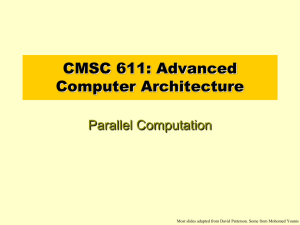
ILP Wall - Past the Knee of the Curve?
Performance
Made sense to go
Superscalar/OOO:
good ROI
Very little gain for
substantial effort
Scalar
In-Order
Moderate-Pipe
Superscalar/OOO
Very-Deep-Pipe
Aggressive
Superscalar/OOO
“Effort”
Source: G. Loh
(15)
Thread Level Parallelism (TLP)
• Multiple threads of execution
• Exploit ILP in each thread
• Exploit concurrent execution across threads
(16)
Instruction and Data Streams
• Taxonomy due to M. Flynn
Data Streams
Single
Instruction Single
Streams
Multiple
Multiple
SISD:
Intel Pentium 4
SIMD: SSE
instructions of x86
MISD:
No examples today
MIMD:
Intel Xeon e5345
SPMD: Single Program Multiple Data
A parallel program on a MIMD computer where each
instruction stream is identical
Conditional code for different processors
(17)
Programming Model: Multithreading
• Performing multiple threads of execution in
parallel
Replicate registers, PC, etc.
Fast switching between threads
• Fine-grain multithreading
Switch threads after each cycle
Interleave instruction execution
If one thread stalls, others are executed
• Coarse-grain multithreading
Only switch on long stall (e.g., L2-cache miss)
Simplifies hardware, but doesn’t hide short stalls
(eg, data hazards)
(18)
Conventional Multithreading
• Zero-overhead context switch
• Duplicated contexts for threads
0:r0
0:r7
1:r0
CtxtPtr
Memory
(shared by
threads)
1:r7
2:r0
2:r7
3:r0
3:r7
Register file
(19)
Simultaneous Multithreading
• In multiple-issue dynamically scheduled
processor
Schedule instructions from multiple threads
Instructions from independent threads execute when
function units are available
Within threads, dependencies handled by scheduling
and register renaming
• Example: Intel Pentium-4 HT
Two threads: duplicated registers, shared function
units and caches
Known as Hyperthreading in Intel terminology
(20)
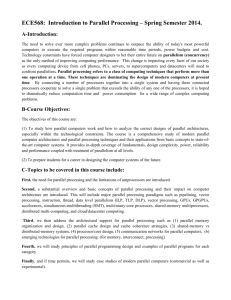
Hyper-threading
2 CPU Without Hyper-threading
Arch State
Arch State
Processor
Execution
Resources
Processor
Execution
Resources
2 CPU With Hyper-threading
Arch State
Arch State
Processor
Execution
Resources
Arch State
Arch State
Processor
Execution
Resources
• Implementation of Hyper-threading adds less
that 5% to the chip area
• Principle: share major logic components by
adding or partitioning buffering logic
21
(21)
Multithreading Example
(22)
Shared Memory
• SMP: shared memory multiprocessor
Hardware provides single physical
address space for all processors
Synchronize shared variables using locks
Memory access time
o UMA (uniform) vs. NUMA (nonuniform)
(23)
Example: Communicating Threads
Producer
Consumer
The Producer calls
while (1) {
while (count == BUFFER_SIZE)
; // do nothing
// add an item to the buffer
++count;
buffer[in] = item;
in = (in + 1) % BUFFER_SIZE;
}
(24)
Example: Communicating Threads
Producer
Consumer
The Consumer calls
while (1) {
while (count == 0)
; // do nothing
// remove an item from the buffer
--count;
item = buffer[out];
out = (out + 1) % BUFFER_SIZE;
}
(25)
Uniprocessor Implementation
•
count++ could be implemented as
register1 = count;
register1 = register1 + 1;
count = register1;
•
count-- could be implemented as
register2 = count;
register2 = register2 – 1;
count = register2;
•
Consider this execution interleaving:
S0:
S1:
S2:
S3:
S4:
S5:
producer execute
producer execute
consumer execute
consumer execute
producer execute
consumer execute
register1 = count
register1 = register1 + 1
register2 = count
register2 = register2 - 1
count = register1
count = register2
{register1 = 5}
{register1 = 6}
{register2 = 5}
{register2 = 4}
{count = 6 }
{count = 4}
(26)
Synchronization
• We need to prevent certain instruction
interleavings
Or at least be able to detect violations!
• Some sequence of operations (instructions)
must happen atomically
E.g.,
register1 = count;
register1 = register1 + 1;
count = register1;
atomic operations/instructions
(27)
Synchronization
• Two processors sharing an area of memory
P1 writes, then P2 reads
Data race if P1 and P2 don’t synchronize
o Result depends of order of accesses
• Hardware support required
Atomic read/write memory operation
No other access to the location allowed between the
read and write
• Could be a single instruction
E.g., atomic swap of register ↔ memory
Or an atomic pair of instructions
(28)
Synchronization in MIPS
• Load linked: ll rt, offset(rs)
• Store conditional: sc rt, offset(rs)
Succeeds if location not changed since the ll
o Returns 1 in rt
Fails if location is changed
o Returns 0 in rt
• Example: atomic swap (to test/set lock
variable)
try: add
ll
sc
beq
add
$t0,$zero,$s4
$t1,0($s1)
$t0,0($s1)
$t0,$zero,try
$s4,$zero,$t1
;copy exchange value
;load linked
;store conditional
;branch store fails
;put load value in $s4
(29)
Cache Coherence
• A shared variable may exist in multiple caches
• Multiple copies to improve latency
• This is a really a synchronization problem
(30)
Cache Coherence Problem
• Suppose two CPU cores share a physical
address space
Write-through caches
Time Event
step
CPU A’s
cache
CPU B’s
cache
0
Memory
0
1
CPU A reads X
0
0
2
CPU B reads X
0
0
0
3
CPU A writes 1 to X
1
0
1
(31)
Example (Writeback Cache)
P
P
Rd?
Cache
Rd?
Cache
X= -100
Memory
Courtesy H. H. Lee
P
Cache
X= -100
505
X=
X= -100
X= -100
(32)
Coherence Defined
• Informally: Reads return most recently written
value
• Formally:
P writes X; P reads X (no intervening writes)
read returns written value
P1 writes X; P2 reads X (sufficiently later)
read returns written value
o
c.f. CPU B reading X after step 3 in example
P1 writes X, P2 writes X
all processors see writes in the same order
o
End up with the same final value for X
(33)
Cache Coherence Protocols
• Operations performed by caches in
multiprocessors to ensure coherence
Migration of data to local caches
o
Reduces bandwidth for shared memory
Replication of read-shared data
o
Reduces contention for access
• Snooping protocols
Each cache monitors bus reads/writes
• Directory-based protocols
Caches and memory record sharing status of blocks
in a directory
(34)
Invalidating Snooping Protocols
• Cache gets exclusive access to a block when it is
to be written
Broadcasts an invalidate message on the bus
Subsequent read in another cache misses
o
Owning cache supplies updated value
CPU activity
Bus activity
CPU A’s
cache
CPU B’s
cache
Memory
0
CPU A reads X
Cache miss for X
0
0
CPU B reads X
Cache miss for X
0
0
0
CPU A writes 1 to X
Invalidate for X
1
invalid
0
CPU B read X
Cache miss for X
1
1
1
(35)
Programming Model: Message Passing
• Each processor has private physical address
space
• Hardware sends/receives messages between
processors
(36)
Parallelism
• Write message-passing programs
• Explicit send and receive of data
Rather than accessing data in shared memory
Process 2
Process 2
send()
receive()
receive()
send()
(37)
Loosely Coupled Clusters
• Network of independent computers
Each has private memory and OS
Connected using I/O system
o E.g., Ethernet/switch, Internet
• Suitable for applications with independent
tasks
Web servers, databases, simulations, …
• High availability, scalable, affordable
• Problems
Administration cost (prefer virtual machines)
Low interconnect bandwidth
o c.f. processor/memory bandwidth on an SMP
SMP – Shared Memory Processor
(38)
High Performance Computing
theregister.co.uk
zdnet.com
• The dominant programming model is message
passing
• Scales well but requires programmer effort
• Science problems have fit this model well to
date (e.g., Weather Prediction)
(39)
Grid Computing
• Separate computers interconnected by longhaul networks (2 dimensional grid)
E.g., Internet connections
Work units farmed out, results sent back
• Can make use of idle time on PCs
E.g., SETI@home, World Community Grid
(40)
Programming Model: SIMD
• Operate element wise on vectors of data
E.g., MMX and SSE instructions in x86
o
Multiple data elements in 128-bit wide registers
• All processors execute the same instruction at
the same time
Each with different data address, etc.
• Simplifies synchronization
• Reduced instruction control hardware
• Works best for highly data-parallel applications
• Data Level Parallelism
Single Instruction – Multiple Data
(41)
SIMD Co-Processor
• Graphics and media processing operates on
vectors of 8-bit and 16-bit data
Use 64-bit adder, with partitioned carry chain
o
Operate on 8×8-bit, 4×16-bit, or 2×32-bit vectors
SIMD (single-instruction, multiple-data)
4x16-bit
2x32-bit
(42)
History of GPUs
• Early video cards
Frame buffer memory with address generation for
video output
• 3D graphics processing
Originally high-end computers (e.g., SGI)
Moore’s Law lower cost, higher density
3D graphics cards now for PCs and game consoles
• Graphics Processing Units
Processors oriented to 3D graphics tasks
Vertex/pixel processing, shading, texture mapping,
rasterization
(43)
Graphics in the System
(44)
GPU Architectures
• Processing is highly data-parallel
GPUs are highly multithreaded
Use thread switching to hide memory latency
o Less reliance on multi-level caches
Graphics memory is wide and high-bandwidth
• Trend toward general purpose GPUs
Heterogeneous CPU/GPU systems
CPU for sequential code, GPU for parallel code
• Programming languages/APIs
DirectX, OpenGL
C for Graphics (Cg), High Level Shader Language
(HLSL)
Compute Unified Device Architecture (CUDA)
(45)
Example: NVIDIA Tesla
Streaming
multiprocessor
8 × Streaming
processors
(46)
Compute Unified Device Architecture
Bulk synchronous
processing (BSP)
execution model
For
access to CUDA tutorials
http://developer.nvidia.com/cuda-education-training
(47)
47
Example: NVIDIA Tesla
• Streaming Processors
Single-precision FP and integer units
Each SP is fine-grained multithreaded
• Warp: group of 32 threads
Executed in parallel,
SIMD style
o
8 SPs
× 4 clock cycles
Hardware contexts
for 24 warps
o
Registers, PCs, …
(48)
Classifying GPUs
• Does not fit nicely into SIMD/MIMD model
Conditional execution in a thread allows an illusion of
MIMD
o
o
But with performance degradation
Need to write general purpose code with care
Instruction-Level
Parallelism
Data-Level
Parallelism
Static: Discovered
at Compile Time
Dynamic: Discovered
at Runtime
VLIW
Superscalar
SIMD or Vector
Tesla Multiprocessor
Really Single Instruction Multiple Thread (SIMT)
(49)
Vector Processors
• Highly pipelined function units
• Stream data from/to vector registers to units
Data collected from memory into registers
Results stored from registers to memory
• Example: Vector extension to MIPS
32 × 64-element registers (64-bit elements)
Vector instructions
o lv, sv: load/store vector
o addv.d: add vectors of double
o addvs.d: add scalar to each element of vector of
double
• Significantly reduces instruction-fetch bandwidth
(50)
Cray-1: Vector Machine
• Mid 70’s – principles
have not changed
• Aggregate operations
defined on vectors
• Vector ISAs operating
on vector instruction
sets
• Load/store ISA ala MIPS
• Often confused with
SIMD
From pg-server.csc.ncsu.edu
(51)
Vector vs. Scalar
• Vector architectures and compilers
Simplify data-parallel programming
Explicit statement of the absence of loop-carried
dependences
o
Reduced checking in hardware
Regular access patterns benefit from interleaved and
burst memory
Avoid control hazards by avoiding loops
• More general than ad-hoc media extensions
(such as MMX, SSE)
Better match with compiler technology
(52)
Interconnection Networks
• Network topologies
Arrangements of processors, switches, and
links
Bus
Ring
N-cube (N = 3)
2D Mesh
Fully connected
(53)
Network Characteristics
• Performance
Latency per message (unloaded network)
Throughput
o
o
o
Link bandwidth
Total network bandwidth
Bisection bandwidth
Congestion delays (depending on traffic)
• Cost
• Power
• Routability in silicon
(54)
Modeling Performance
• Assume performance metric of interest is
achievable GFLOPs/sec
Measured using computational kernels from Berkeley
Design Patterns
• Arithmetic intensity of a kernel
FLOPs per byte of memory accessed
• For a given computer, determine
Peak GFLOPS (from data sheet)
Peak memory bytes/sec (using Stream benchmark)
(55)
Roofline Diagram
Attainable GPLOPs/sec
= Max ( Peak Memory BW × Arithmetic Intensity, Peak FP Performance )
(56)
Comparing Systems
• Example: Opteron X2 vs. Opteron X4
2-core vs. 4-core, 2× FP performance/core, 2.2GHz vs.
2.3GHz
Same memory system
To get higher
performance on X4 than
X2
Need high arithmetic
intensity
Or working set must fit in
X4’s 2MB L-3 cache
(57)
Optimizing Performance
• Optimize FP performance
Balance adds & multiplies
Improve superscalar ILP and
use of SIMD instructions
• Optimize memory usage
Software prefetch
o
Avoid load stalls
Memory affinity
o
Avoid non-local data accesses
(58)
Optimizing Performance
• Choice of optimization depends on arithmetic
intensity of code
Arithmetic intensity is not
always fixed
May scale with problem size
Caching reduces memory
accesses
Increases arithmetic
intensity
(59)
Four Example Systems
2 × quad-core
Intel Xeon e5345
(Clovertown)
2 × quad-core
AMD Opteron X4 2356
(Barcelona)
(60)
Four Example Systems
2 × oct-core
Sun UltraSPARC
T2 5140 (Niagara 2)
2 × oct-core
IBM Cell QS20
(61)
And Their Rooflines
•Kernels
SpMV (left)
LBHMD (right)
•Some optimizations
change arithmetic
intensity
•x86 systems have
higher peak GFLOPs
But harder to achieve,
given memory bandwidth
(62)
Pitfalls
• Not developing the software to take account of
a multiprocessor architecture
Example: using a single lock for a shared composite
resource
o
o
Serializes accesses, even if they could be done in
parallel
Use finer-granularity locking
(63)
Concluding Remarks
• Goal: higher performance by using multiple
processors
• Difficulties
Developing parallel software
Devising appropriate architectures
• Many reasons for optimism
Changing software and application environment
Chip-level multiprocessors with lower latency, higher
bandwidth interconnect
• An ongoing challenge for computer architects!
(64)
Study Guide
• Be able to explain the following concepts ILP,
MT, SMT, TLP, DLP, MIMD, SIMD, SISD*
• Explain the roofline model of performance
• Use of Amdahl’s Law in demonstrating the
limits of scaling
• What is the impact of a sequence of read/write
operations on shared data?
Cache coherence
• How does ILP differ from SMT
• How does SIMD differ from vector?
• What is the difference between weak vs. strong
scaling?
*Instruction Level Parallelism, Multi-Scaler Techn., Shared Memory Techn.,
Thread LP, Data LP, Multiple Instruction-Multiple Data, Single-Instruct Single Data
(65)