Overview of Lab. 1
advertisement

Over-view of Lab. 1
See the Lab. 1 web-site
and later lecture notes for more details
All embedded projects (every one built
in the world) require the following
Build a “project” directory using a “development
environment.
Add code to -- CODE IS RE-USED IN LATER LABS
Initialize the system
Read general purpose input signals (I part of GPIO)
Write general purpose output signals (O part of GPIO)
Initialize and use peripherals
Timers, serial interfaces to LCD screens, thermal sensors, light
sensors, accelerometers, DSP programs for analysis
Build system in a controlled and testable manner
Incremental build, testing framework
Operating system (Super loop, co-operative scheduler, event
driven scheduler)
2 /23
E.g. Radio controlled voice activated
robotic car “term” project
Set-up the processor to control the board A/D
and D/A; allows capture and play-back sound.
Set-up the processor so that we can read
general purpose input lines (GPIO -- switches)
so we send various different commands to car.
Use the digital signal processing (DSP) part of
Blackfin processor to run canned (meaning
written by somebody else) frequency analysis
program to recognize voice commands
Use the analysis of the sounds to output control
values to a radio transmitter and control the car.
3 /23
Main Code – pseudo code for the
“voice controlled car”
main( ) {
// red – means canned code – green means done in Lab. 1
Launch the Analog Devices audio “echo” program – a background interruptdriven task that is given to you – you will modify this code
InitFlashASM( );
// Activate the system Flash memory without
// stopping audio program which uses the Flash interface too
// This enables you to write to the LED’s on the Blackfin board
InitializePFInterfaceASM( ); // Activate the Push-button controller
// This enables you to read switches SW1, SW2, SW3, SW4
Launch “VDK multi-threads” (separate processes) to control various
processes
// The VDK O/S is provided as part of the VDSP IDE
Thread 1 – Captures and then stores batches of sound for analysis
Thread 2 – Analyze previous stored sound for possible “commands”
Thread 3 – Use previous commands to send commands to control the car
Thread 4 – Check evaluation buttons for “options” (autopilot etc)
Thread 5 etc
4 /23
Another possible example project
using the same code ideas
We want to build a audio controller
Reuse CANNED examples provided by Analog
Devices
Audio in captured using audio A/D (CODEC)
Audio out generated using audio D/A (CODEC)
Manipulate the sound quality
Modify functions that use Lab. 1 hardware interfaces
Push buttons to control audio controller operations – e.g.
graphics equalizer
LED lights to display operation results and sound volume
level (dancing lights)
5 /23
Main Code – pseudo code for the
“audio controller”
main( ) {
Launch the Analog Devices audio “echo” program – a background
interrupt-driven task that is given to you – you will modify this code
InitFlashASM( ); // Activate the system Flash memory without stopping
// the audio program which uses the Flash interface too
InitializePFInterfaceASM( ); // Activate the Push-button controller
Wait for button1 to be pressed and released (ReadButtonASM() ), then
play the sound at half-volume.
Wait for button2 to be pressed and released, play the sound at normal
volume
When button3 is pressed -- Generate the extremely fascinating (but
completely useless) dancing lights which change with the audio stream
volume level
Wait for button4 to be pressed and released, quit the program (turn off the
sound and stop the processor)
}
6 /23
If we wanted to get fancy we could do the
following to the audio Talkthrough program
Gargling operation
Need to add a simple counter that increments by
1 every 1 / 44000 s (increments each time that
an audio sample is obtained)
Use the counter to control when to turn the
sound off and on every ½ s
Gargling sound is produced rather than just
“turning the sound off”
For more details – see Lab. 1 from 2006.
7 /23
Lab. 1 – Key project interfacing
Microcontroller I/O demonstration
Your group must come into the laboratory class prepared to be able
to demonstrate all of the following by the end of laboratory period
You will make use of some of the code developed during the
assignments. (Note assignments may be due AFTER the laboratory)
Initialize the push-button controller interface
Read, and use, a value provided by the push-button controller.
Initialize the Flash LED display interface (so that it works)
Write a value to the LED display
Read, and use, a value stored in the LED display, so you can test that
you are getting the correct answer
Demonstrate tests to show that these operations work as required
OPTIONAL “ENCM511 Project club”
Each laboratory will provide you with enough interface information to get a
component of the voice-activated radio control car to work.
Extra hours of work will needed to write and test the necessary C++ code to make
the interfaces operate correctly – but that can be split amongst those interested.
Develop a voice activated “Windows Mobile cell-phone application”
8 /23
Lab. Task – Does my ADSP-BF533 board
work? Download audio-talk-through program
If you have not already done so, download and expand
ENCM511Directory2010.zip file (used in assignment 1) so that you have the
correct directory. structure and test driven development environment
needed for Laboratory 1.
Download and expand the files in 10CPP_Talkthrough.zip into your
AudioDemo directory.
Build an AudioDemo Blackfin project in your AudioDemo directory and add
the (provided) files into the project -- compile and link.
Download the executable (.dxe) file onto the BF533 processor.
Hook up your CD or IPOD output to the CJ2 stereo input.
Hook up your ear-phones to the CJ3 stereo output.
Run the AudioDemo.dxe executable and check that the talk through
program is working.
This task demonstrated your ability to build VDSP Blackfin projects and run
the code (Marks for Familiarization Lab). The AudioDemo code (running in a
multithread environment) forms the basis of the (optional) voice-activated
radio-controlled car project.
9 /17
Tasks of Laboratory 1
Basic Task – develop the LED interface
Initialize the Flash memory using the Blackfin
External Bus Interface Unit (EBIU) (ASM)
Initialize the memory controller of the Blackfin Evaluation Board
LED’s (ASM) – can control devices and write large code
The Blackfin external bus interface unit is used to perform many
“microcontroller” operations
Initialize SDRAM, audio chips etc,
Task (mainly in C++) that use the LED interface
E.g. Develop a simple counter (in C++) and display value
E.g. Write a C++ routine to write morse code values into an array
E.g. Write a routine to transfer the morse code values to the
LED’s (first in C++, then ASM)
homepage.ntlworld.com/dmitrismirnov/morse-tab1.JPG
10 /23
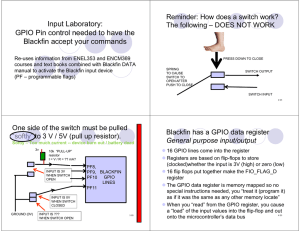
Task – Initialize the Programmable flag
interface – 16 GPIO lines on the Blackfin
Warning – could burn out the Blackfin processor if
coding is done incorrectly
You need to set (store a known value to) a number
of internal registers in the Blackfin processor core.
Other processors need equivalent GPIO control methods
Most important registers
FIO_DIR – Data DIRection – set to value ?? for input ****
FIO_INEN – INterface Enable – set to value ?? for enabling
the input (otherwise they will not work – power saving)
11 /23
FIO_FLAG_D – Programmable FLAG Data register
Why do you need to know how to do
read (load) and write (store) on internal registers?
Flag Direction register (FIO_DIR)
Used to determine if the PF bit is to be used for input or output -WARNING SMOKE POSSIBLE ISSUE
USE equivalent of AND instruction from ENCM369 to clear bits PF11 to
PF8 to 0 for input, but must leave all other bits unchanged in value.
Read peripheral register value, use AND instruction to zero the required bits, write back
value
12 /23
Registers used to control PF pins
Flag Input Enable Register
Only activate the pins you want to use (saves power in
telecommunications situation)
USE OR instruction from ENCM369 to enable (activate) pins PF11
to PF8 for input, leave all other bits in register unchanged
Read peripheral register value, use OR instruction to SET the required bits, write back value
13 /23
Registers used to control PF pins
Flag Data register (FIO_FLAG_D)
Used to read the PF bits (1 or 0)
Need to read pins PF11 to PF8, ignore all other pins values. This requires AND
and SHIFT instructions from ENCM369.
Read register value, use AND instruction to clear unwanted bits, then use masked value in code
14 /23
Warning
The class notes remind you of the following
important facts
USE equivalent of AND instruction from ENCM369 to clear bits PF11 to PF8 to 0 for input, but
must leave all other bits unchanged in value.
Read peripheral register value, use AND instruction to zero ONLY the required bits, write
back value
USE OR instruction from ENCM369 to enable (activate) pins PF11 to PF8 for input, leave all
other bits in register unchanged
Read peripheral register value, use OR instruction to set ONLY required bits to 1, write
back value
These techniques were demonstrated in the tutorial this morning (Friday 24)
The lab pages WILL NOT remind you of
those following important facts
This will give you the opportunity to make ‘real-life’ mistakes in the
laboratory and work out how to recognize that problems are occurring and
15 /18
fix problems.
Task – Setting up the programmable flag
interface
Follow the instructions carefully
FIO_DIR – direction register – write 0’s to bits 8, 9, 10, 11
– leave other bits unchanged (READ / then AND / WRITE
operations) -- This sets the pins as INPUT pins
FIO_INEN – input enable register – write 1’s to bits 8, 9,
10, 11 – leave other bits unchanged (READ / then OR /
WRITE operations) – This activates (turns on) the pins as
INPUT pins
Other GPIO registers write 0’s to bits 8, 9, 10, 11 – leave
other bits unchanged (READ / then AND / WRITE
operations)
There is a test program that will enable you to check your
16 /23
code – provide a screen dump of test result.
Task – Read the switches on the front
panel in “real life”
Transfer the information to the LEDs so you can
demonstrate correct operations
Build Initialize_ProgrammableFlagsASM ( )
MUST HAVE 50 pin cable connected between logic board and
Blackfin for the switch values to be read correctly – otherwise switch
input always reads “1”. Watch the demonstrations
Logic board power supply must be turned on (or your code will
always read 1 from the switches)
What we could do – “Simple optical transmitter project”
Place a “light sensitive detector” in front of the LEDs on a “second”
Blackfin station where that station is sending morse messages.
Use the output of the detector as the input to the “First Blackfin”
instead of the switch, and capture the light code signals
Print out the “morse” code transmissions on the screen of the “first”
17 /23
station – very basic optical transmission
extern “C” int ReadGPIOFlags( )
#include <blackfin.h>
.global _ReadGPIOFlags;
_ReadGPIOFlags:
// Make an address register “point” to
// the GPIO Flag register to read switches
P1.L = lo (FIO_FLAG_D);
P1.H = hi (FIO_FLAG_D);
// Read the “16” bit flag register value and return
// the value for the C++ code to use
R0 = W[P1] (Z); // convert 16 to 32 bits
_ReadGPIOFlags.END: RTS;
Must use W [ ] 16-bit
read since the manual
shows that
FIO_FLAG_D register is
16-bits
ZERO EXTENSION
Must use W[P1] (Z)
zero-extend as this adds
16 zeros to the 16 bits
from FIO_FLAG_D
register to make 32-bits
to place into R0
0xFF00 becomes
0x0000FF00
18 /23
Sign extension of input often needed
FLAG REGISTER HOLD BIT-PATTERNS NOT NUMBERS
The audio chip brings in 24 bit values representing the digital value
(positive or negative) of the audio volume
Negative values 0x800000 (-2^23)
to 0xFFFFFF (-1)
Positive values 0x000000 (0) to 0x7FFFFF (2^23 -1).
However, the values are read into the Blackfin 32 bit data register
as values the audio volume (ZERO EXTENSION)
Positive values 0x00800000 (PLUS 2^23)
to 0x00FFFFFF (PLUS 2^24 - 1)
Positive values 0x0000000000 (0) to 0x00007FFFFF (2^23 -1)
Audio signal will sound very distorted unless sign extension applied
Negative values 0xFF800000 (- 2^23)
to 0xFFFFFFFF (- 1)
Positive values 0x0000000000 (0) to 0x00007FFFFF (2^23 -1)
FLAG DATA REGISTER
ZERO EXTENSION
Must use W [ ] 16-bit
read since the manual
shows that FIO_FLAG_D
register is 16-bits
Must use W[P1] (Z)
zero-extend as this adds
16 zeros to the 16 bits
from FIO_FLAG_D
register to make 32-bits to
place into R0
0xFF00 becomes
0x0000FF00
19 /17
Using that assembly code to just
wrote from C++
extern “C” int ReadGPIOFlags( );
int ReadPushButtonSwitches(void) {
SW4
InitializeGPIORegisters( ); // Lab. 1
int GPIOFlagValues = ReadGPIOFlags( );
SW2
SW3
SW1
// Must happen AFTER Init( ) or
// garbage results are obtained
int maskToRemoveUnwantedBits = 0x0F00;
// Review of ENCM369 – AND operation & and NOT &&
int wantedGPIOFlagValues = GPIOFlagValues & maskToRemoveUnwantedBits;
return (wantedGPIOFlagValues >> 8);
// bit shift operation
}
Returns 1 if switch 1 pressed, returns 2 if switch 2 pressed,
Returns 4 if switch 3 pressed, returns 8 if switch 4 pressed,
Returns 5 if switch 1 and switch 3 are pressed at the same time
20 /23
Controlling a radio controlled car
using the pushbuttons
A L F R
Switch 2 pressed means go forward for 1/ 2 s
Switch 1 means turn wheels right
Switch 3 means turn wheels left
Switch 4 means accept command
(Later replace switch control with music / voice control)
Thus pressing switches
2, 2, 1 with 2, 2, 2, 3 with 2, 2, 2, 0, 0, 0, 0
Would cause the car to go down an “S” shape path
21 /23
Store the commands to control a car
into an array for later play-back
#define STOP 0
int storeCommands[20];
int numberStopCommands = 0;
int count = 0;
while (numberStopCommands < 4) {
command = GetValidCommand( );
if (command == STOP) {
numberStopCommands ++;
}
else {
numberStopCommands = 0;
}
storeCommands[count++] = command;
// System crashes is more than 20 commands are entered – WHY?? – good mid term question
// Is the way that viruses cause overflow of input buffer problem
}
22 /23
Get a valid command to control a car
#define SWITCH4 0x8
#define ACCEPTCOMMAND SWITCH4
int GetValidCommand( ) {
int command = ReadPushButtonSwitches( );
while ( (command & ACCEPTCOMMAND) != ACCEPTCOMMAND} {
command = ReadPushButtonSwitches( );
}
// Get here when somebody pushes switch 4
// Explain why it is a logical error if we just exit this code here
// NOT fixing this error will cause “mucho-grief” in the lab – work out the problem with your lab partner
return command;
}
23 /23
Task -- Tests
There needs to be software tests (E-TDD) to
allow you to demonstrate that your code works
correctly
Note there are test executables (.dxe) available
to test out your equipment
This code can be used to test the switches and the
LED interface on your board. SwitchToLED.dxe
This is the final version of my code for the “fancy”
audio controller DrSmithAudioController.dxe
24 /24