FDTD
advertisement

Finite Difference Time Domain
Method
(FDTD)
FDTD: The Basic Algorithm
• Maxwell’s Equations in the TIME Domain:
H
X E
t
E
X H E
t
Equate Vector Components:
Six E and H-Field Equations
H x 1 E y E z
t z y
H y 1 E z E x
t x z
H z 1 E x E y
t y x
E x 1 H z H y
E x
t y
z
E y 1 H x H z
E y
t z
x
E z 1 H y H x
E z
t x
y
2-D Equations:
Assume that all fields are uniform in y
direction (i.e. d/dy = 0)
2D - TE
H y 1 E z E x
t
x
z
E x
1 H y
E x
t
z
E z
1 H y
E z
t
x
2D - TM
H x 1 E y
t z
H z
1 E y
t
x
E y 1 H x H z
E y
t z
x
1-D Equations:
Assume that all fields are uniform in y
and x directions (i.e. d/dy =d/dx= 0)
1D - TE
H y
1 E x
t
z
E x
1 H y
E x
t
z
1D - TM
H x 1 E y
t z
E y 1 H x
E y
t z
Discretize Objects in Space
using Cartesian Grid
3D Discretization
2D Discretization
z
x
1D Discretization
Z
z0
Ex ( z , t )
zZ
Define Locations of Field
Components:
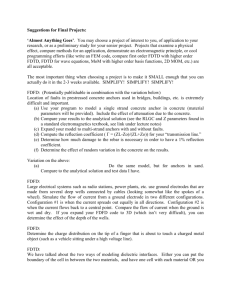
FDTD Cell called Yee Cell
•
Finite-Difference
– Space is divided into small cells
One Cell: (dx)(dy)(dz)
– E and H components are
distributed in space around the
Yee cell (note: field components
are not collocated)
FDTD: Yee, K. S.: Numerical solution of initial boundary value problems involving
Maxwell's equations in isotropic media. IEEE Transactions on Antennas
Propagation, Vol. AP-14, pp. 302-307, 1966.
Replace Continuous
Derivatives with Differences
•
Derivatives in time and space are approximated as DIFFERENCES
f
f ' slope of curve
x
Central Difference Formula :
f i ' f ' ( xi )
f i 1 f i 1
Error (h 2 )
2h
Solution then evolves by timemarching difference equations
– Time is Discretized
• One Time Step: dt
– E and H fields are
distributed in time
– This is called a
“leap-frog”
scheme.
Yee Algorithm
Definitions of spatial meshing
and time step
Initialization
Iteration n
Calculation of En from Hn-1/2 and
En-1
Calculation of Hn+1/2 from En and
Hn-1/2
n=n+1
N=Nbiteration
End
1-D FDTD
Assuming that field values can only vary in the z-direction (i.e.
all spatial derivatives in x and z direction are zero), Maxwell’s
Equations reduce to:
H y
1 E x
t
z
Ex
1 H y
Ex
t
z
z
Hy
Ex
(z), (z)
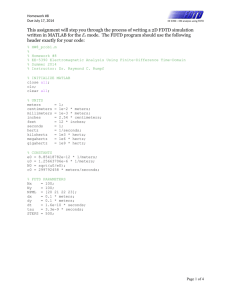
1-D FDTD – Staggered Grid in Space
Interleaving of the Ex and Hy field components in space and time in the 1-D FDTD formulation
Time plane
Ex
Hy
Ex
1
n
z
2
3
n
z
2
( nz 1
( nz 2
3
nz
2
( nz 1
( nz
1
nz
2
3
n
z
2
1
n
z
2
1
nz
2
1
nt
2
( nt
3
nz
2
1
n
t
2
1-D FDTD
H y
1 E x
t
z
Ex
1 H y
Ex
t
z
Replace all continuous derivatives with central finite differences
H yn (i) H yn1/ 2 (i) H yn1/ 2 (i)
t
t
E (i) E
t
n
x
n 1/ 2
x
(i) E
t
n 1/ 2
x
(i)
H yn (i) H yn (i 1 / 2) H yn (i 1 / 2)
z
z
Exn (i) Exn (i 1 / 2) Exn (i 1 / 2)
z
z
Exn1/ 2 (i) Exn 1/ 2 (i)
E (i)
2
n
x
Note: finite differences are 2nd order in time and space
1-D FDTD
Ex
1 H y
Ex
t
z
Replace all continuous derivatives with finite differences
E xn (i) E xn 1/ 2 (i ) Exn 1/ 2 (i )
t
t
H yn (i) H yn (i 1 / 2) H yn (i 1 / 2)
z
z
Exn 1/ 2 (i ) E xn 1/ 2 (i)
E (i)
2
n
x
n
n
E xn 1/ 2 (i ) E xn 1/ 2 (i )
E xn 1/ 2 (i ) E xn 1/ 2 (i )
1 H y (i 1 / 2) H y (i 1 / 2)
t
z
2
n 1 / 2
Solve for E x
Exn 1/ 2 (i)
(i )
2 t n 1/ 2
2t
Ex (i)
H yn (i 1 / 2) H yn (i 1 / 2)
2 t
z (2 t
(
1-D FDTD
H y
1 E x
t
z
Replace all continuous derivatives with finite differences
and increment time by one half time step
H yn1/ 2 (i) H yn1 (i) H yn (i)
t
t
H yn1 (i) H yn (i)
t
H
Exn1/ 2 (i 1 / 2) Exn1/ 2 (i 1 / 2)
z
1
Solve for
n 1
y
Exn1/ 2 (i) Exn1/ 2 (i 1 / 2) Exn1/ 2 (i 1 / 2)
z
z
H yn1 (i)
t n 1/ 2
(i) H (i)
Ex (i 1 / 2) E xn 1/ 2 (i 1 / 2)
z
n
y
(
1-D FDTD
H y
1 E x
t
z
Ex
1 H y
Ex
t
z
After some simple algebra:
E
n 1/ 2
x
2 t n1/ 2
2t
(i)
Ex (i)
H yn (i 1 / 2) H yn (i 1 / 2)
2 t
z(2 t
(
t n1/ 2
H (i) H (i)
Ex (i 1 / 2) Exn1/ 2 (i 1 / 2)
z
n 1
y
n
y
(
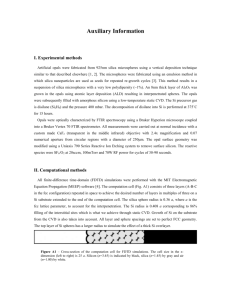
1-D FDTD – Staggered Grid in Space
Interleaving of the Ex and Hy field components in space and time in the 1-D FDTD formulation
i=1
i=2
i=3
i=4
1
nt
2
Ex
z=0
z=dz
i=1
z=2*dz
i=2
z=3*dz
i=3
i=4
( nt
Hy
z=dz/2
E
n 1/ 2
x
z=3dz/2
z=5*dz/2
z=7*dz/2
2 ( z ) t ( z ) n1/ 2
2t
( z)
Ex ( z )
H yn ( z dz / 2) H yn ( z dz / 2)
2 ( z ) t ( z )
z (2 ( z ) t ( z )
(
E
n 1/ 2
x
2 (i) t (i) n1/ 2
2t
(i)
Ex (i)
H yn (i) H yn (i 1)
2 (i) t (i)
z(2 (i) t (i)
(
1-D FDTD – Staggered Grid in Space
Interleaving of the Ex and Hy field components in space and time in the 1-D FDTD formulation
i=1
i=2
i=3
i=4
1
nt
2
Ex
z=0
z=dz
z=2*dz
i=1
i=2
z=3*dz
i=3
i=4
( nt
Hy
z=dz/2
H yn 1 ( z ) H yn ( z )
z=3dz/2
z=5*dz/2
z=7*dz/2
t
E xn 1/ 2 ( z dz / 2) E xn 1/ 2 ( z dz / 2)
( z )z
H yn 1 (i ) H yn (i )
(
t
E xn 1/ 2 (i 1) E xn 1/ 2 (i )
(i)z
(
1-D FDTD – Basic Core of Code
Loop through all
of the E -grid
Loop through all
of the H -grid
Loop through all time steps
for n=2:Nt % all time steps
end
for i=2:Nx-1 % all interior nodes
Ex (i, n)
2 (i) t (i)
2t
Ex (i, n 1)
H y (i, n 1 ) H yn (i 1, n 1 )
2 (i) t (i)
z (2 (i) t (i)
end
(
Note: H uses the new values of E. This is
Equivalent to incrementing by ½ a time step
for i=2:Nx-1 % all interior nodes
H y (i, n) H yn (i, n 1)
end
t
E (i 1, n 1) E x (i, n 1)
(i )z x
(
SOME OPEN QUESTIONS??
•
•
•
•
How do we determine what t and z
should be?
How do we implement real sources?
How do we simulate open boundaries?
How accurate is the solution?
Numerical Stability
Like all iterative algorithms FDTD has the possibility of not
converging on a solution. This usually results in the algorithm
going unstable and producing ever increasing field values
over time. When does this happen?
1-D
2-D
3-D
x
t
c
t
t
1
1
1
c
2
x
y 2
1
1
1
1
c
2
2
2
x
y
z
Numerical Dispersion
In real life plane waves traveling in a homogenous medium
propagate at the speed of light in that medium independent of
frequency or propagation direction. However, due to our
approximation of continuous derivatives with finite differences
if we launch a plane wave in FDTD it will actually propagate
at a slightly different speed than that of light. Moreover, and
more disturbing, the propagation velocity will depend on the
frequency of the plane wave and its direction of propagation
with respect to the FDTD grid. This effect is known as
numerical dispersion. The effect has been well studied and
mathematically quantified.
Numerical Dispersion
k
c
Continuous Plane Wave
ct
cos(t )
cos( kx) 1 1
x
2
1-D FDTD
case I : t , x 0
k
c
case II : t
k
x
c
Magic time step!
c
x
y
z
sin k x
sin 2 k y
sin 2 k z
2
2
2
2
0
2
2
2
c2
x
y
z
2
2
2
2
2
2
3-D FDTD
At optimal time step
2
1
t
c
1
1
1
2
2
x
y
z 2
Implementation of Boundary Conditions 1D
Boundary condition for a perfectly electrically conducting (PEC) material
Ex(1, nt ) 0
1 nt Nt
( N z , nt )
Ex
0
Absorbing/open boundary condition in 1-D
Space-time-extrapolation of the first order
For the magic time-step
t
x
c
a plane wave needs one time steps to travel over one grid cell with the size ∆z
E xn (i 1) E xn1 (i 2)
E xn (i N z ) E xn1 (i N z 1)
Space-time-extrapolation of the first order
(MATLAB DEMO)
2-D Equations:
Assume that all fields are uniform in y
direction (i.e. d/dy = 0)
2D - TM
H y 1 E z E x
t
x
z
E x
1 H y
E x
t
z
E z
1 H y
E z
t
x
2D - TE
H x 1 E y
t z
H z
1 E y
t
x
E y 1 H x H z
E y
t z
x
2D - TM
H y
1 E z E x
t
x
z
E x
1 H y
E x
t
z
E z
1 H y
E z
t
x
dx
(i-1,j+1)
E-GRID
Ex
dx
Ex
(i+1,j+1)
H-GRID
Ex
Ex
(i,j+1)
Hy
Ez
Hy
Hy
Ez
Ez
Ez
Hy
Ez
(i-1,j)
Ex
(i-1,j)
(i,j)
Ex
(i+1,j)
Ez
(i,j)
Ex
(i-1,j)
(i+1,j)
Ex
Hy
Hy
dz
Ez
Ez
Ex
(i-1,j-1)
Ez
Ez
Ex
(i,j-1)
(i+1,j-1)
Hy
Hy
dz
Ez
Ez
(i-1,j-1)
Ex
(i,j-1)
Ex
2D – TM: Derive FDTD Equations
(i-1,j+1)
H y
1 E z E x
t
x
z
E x
1 H y
E x
t
z
E z
1 H y
E z
t
x
n
1
2
H (i, j ) H y (i, j ) H
t
t
n
1
2
E (i, j ) Ex (i, j ) E
t
t
n
x
n
1
2
E (i, j ) Ez (i, j ) E
t
t
n
z
n 1
2
y
n 1
2
x
(i, j )
(i, j )
Ez
(i-1,j)
Hy
Ez
Ex
(i,j)
Ez
Ez
Ex
(i+1,j+1)
Ez
Ex (i+1,j)
Hy
Hy
dz
Ex
Ez
Ex
(i,j-1)
(i+1,j-1)
H yn (i, j ) H yn (i, j 1 / 2) H yn (i, j 1 / 2)
z
z
H yn (i, j ) H yn (i 1 / 2, j ) H yn (i 1 / 2, j )
x
x
Exn (i, j ) Exn (i, j 1 / 2) Exn (i, j 1 / 2)
z
z
n 1
2
z
(i, j )
Exn 1/ 2 (i, j ) Exn 1/ 2 (i, j )
E (i, j )
2
n
x
(i,,j+1)
Hy
(i-1,j-1)
n
y
Ex
Ezn (i, j ) Exn (i 1 / 2, j ) Exn (i 1 / 2, j )
x
x
Ezn 1/ 2 (i, j ) Ezn 1/ 2 (i, j )
E (i, j )
2
n
z
2D – TM: Derive FDTD Equations
dx
H-GRID
Ex
H y
1 E z E x
t
x
z
Hy
Ez
Ezn (i, j ) Exn (i 1 / 2, j ) Exn (i 1 / 2, j )
x
x
Ez
n 1
H y (i, j ) H y
2
(i, j )
t
Ez
(i,j)
Ex
(i-1,j)
(i+1,j)
Ex
Hy
Hy
dz
Ez
Ez
Ez
(i-1,j-1)
Ex
1
2
Hy
(i-1,j)
Exn (i, j ) Exn (i, j 1 / 2) Exn (i, j 1 / 2)
z
z
n
Ex
(i,j-1)
Ex
1 E zn (i 1 / 2, j ) E zn (i 1 / 2, j ) E xn (i, j 1 / 2) E xn (i, j 1 / 2)
x
z
n
1
2
Solve for H y (i, j )
n
1
2
n
H y (i, j ) H y
1
2
t Ezn (i 1 / 2, j ) Ezn (i 1 / 2, j ) Exn (i, j 1 / 2) Exn (i, j 1 / 2)
(i, j )
x
z
2D – TM: Derive FDTD Equations
n
1
2
n
H y (i, j ) H y
1
2
t Ezn (i 1 / 2, j ) Ezn (i 1 / 2, j ) Exn (i, j 1 / 2) Exn (i, j 1 / 2)
(i, j )
x
z
t
n 1/ 2
n 1/ 2
H
(
i
,
j
1
/
2
)
H
(i, j 1 / 2)
t
/
y
y
n 1
n
2
Ex (i, j )
E (i, j )
t x
t
z
1
1
2
2
1
t
n 1/ 2
n 1/ 2
H
(
i
1
/
2
,
j
)
H
(i 1 / 2, j )
t
/
y
y
n 1
n
2
Ez (i, j )
E (i, j )
t z
t
x
1
1
2
2
1
2-D FDTD – Basic Core of Code
for n=2:Nt % all time steps
Loop through all
of the E -grid
for i=2:Nx-1 % all interior nodes
(i, j) t
t /(i, j) H y (i, j,n 1) H y (i, j 1,n 1)
2(i, j)
E x (i, j,n)
E x (i, j,n 1)
(i, j) t
(i, j)t
z
1
1
2(i, j)
2(i, j)
1
(i, j) t
t /(i, j) H y (i, j,n 1) H y (i 1, j,n 1)
2(i, j)
E z (i, j,n)
E z (i, j,n 1)
(i, j) t
(i, j)t
x
1
1
2(i, j)
2(i, j)
1
end
Loop through all
of the H -grid
for i=2:Nx-1 % all interior nodes
H y (i, j,n) H yn (i, j,n 1)
end
end
t E z (i 1, j,n 1) E z (i, j,n 1) E x (i, j 1,n 1) E x (i, j,n 1)
(i)
x
z
2D – TE: Derive FDTD Equations
n
1
2
n
H x (i, j) H x
n
Hz
1
2
1
2
t E zn (i, j 1/2) E zn (i, j 1/2)
(i, j)
z
n
n
t E y (i 1/2, j) E y (i 1/2, j)
(i, j) Hz (i, j)
x
n
1
2
t
Hxn 1/ 2 (i, j 1/2) H xn 1/ 2 (i, j 1/2) H zn 1/ 2 (i 1/2, j) Hzn 1/ 2 (i 1/2, j)
t
/
n 1
n
2 E (i, j)
E y (i, j)
t y
t
z
x
1
1
2
2
1
Numerical Dispersion 2D case
Using same procedure as for the 1D case we obtain:
2
2
~
~
1 k x x 1 k z z
1
t
ct sin 2 x sin 2 z sin 2
2
~ ~
~ ~
k x k cos( ), k z k sin( )
Source Modeling
1. We can implement a “hard” source by
forcing the fields to predefined values at
specific nodes in the FDTD grid.
For example:
(ntb )2
E z (io, jo,n) Ae
cos( o (nt b))
Source Modeling: Soft Sources
Scattered Field Formulation
1. We can implement a “soft” source by first reformulating
Maxwell’s equations for only the scattered field.
E tot
(1)
H tot
t
H tot E tot
H inc
t
(2)
E
H inc o inc
t
E inc o
E tot
t
(3)
E tot E sc E inc
Htot Hsc Hinc
H tot
H
o inc
t
t
E
E
(H tot H inc ) E tot tot o inc
t
t
(E tot E inc )
(1)-(2):
H sc
H
E sc ( o ) inc
t
t
E
E
sc H sc E sc ( o ) inc E inc
t
t
Use (3) in above
and a little algebra:
Six E and H-Field Equations
Scattered Field
sc
H xsc 1 E y
t z
H ysc 1 E zsc
t x
E zsc o inc
Hx
y
E xsc o inc
Hy
z
sc
H zsc 1 E xsc E y o inc
Hz
t y
x
H sc
H
E sc ( o ) inc
t
t
E
E
sc H sc E sc ( o ) inc E inc
t
t
sc
E inc
E xsc 1 H zsc H y
sc
o
x
E x
E xinc
t y
z
t
inc
E ysc 1 H xsc H zsc
E
y
o
E ysc
E yinc
t z
x
t
sc
E yinc
E zsc 1 H y H xsc
sc
o
E z
E yinc
t x
y
t
2D
Scattered Field
TM
TE
sc
H xsc 1 E y o inc
Hx
t z
sc
H zsc
1 E y o inc
Hz
t
x
E yinc inc
E ysc 1 H xsc H zsc
sc
o
E y
Ey
t z
x
t
sc
E inc
E xsc
1 H y
sc
o
x
E x
E xinc
t
z
t
sc
E yinc
E zsc 1 H y
sc
o
E z
E yinc
t x
t
H ysc 1 E zsc E xsc o H yinc
t x
z
t
1D
Scattered Field
TM
TE
sc
H xsc 1 E y o inc
Hx
t z
inc
E ysc 1 H xsc
E
inc
y
sc
o
E y
Ey
t z
t
sc
E inc
E xsc 1 H y
sc
o
x
E x
E xinc
t
z
t
inc
H ysc
1 E xsc o H y
t
z t
1-D FDTD Scattered Fields (TE)
Hysc 1 E xsc o Hyinc
t
z t
E
sc n 1/ 2
x
sc
E inc
E xsc 1 Hy
sc
o
x
E x
E xinc
t
z
t
(
2 t sc n1/ 2
2t
sc n
sc n
(i)
E x (i)
H y (i 1/2) H y (i 1/2)
2 t
z(2 t
2t( o ) E xinc
2t
(t (n 1/2)t, z iz)
E xinc (t (n 1/2)t, z iz)
(2 t t
(2 t
H
sc n 1
y
(
t sc n 1/ 2
sc n 1/ 2
(i) H (i)
Ex
(i 1/2) E x
(i 1/2)
z
sc n
y
inc
H
t( o ) y
(t nt, z iz)
t
1-D FDTD Scattered Fields (TE)
EXAMPLE INCIDENT FIELD
E xinc (z,t) Acos( o t kz z) Acos( o t
o
c
E xinc (z,t)
o Asin( o t o z)
t
c
z
let t
c
Acos( o ) 0
E xinc (z,t)
0 0
E xinc (z,t) A o sin( o ) 0
0 0
t
In FDTD
t
z
iz
nt
c
c
z)
1-D FDTD – Basic Core of 1D Scattered
Field Code (non-magnetic)
for n=2:Nt % all time steps
for i=2:Nx-1 % all interior nodes
Loop through all
of the E -grid
tau nt
iz
c
If tau<0
2 (i ) t (i )
2t
E x (i, n)
E x (i, n 1)
H y (i, n 1 ) H yn (i 1, n 1 )
2 (i ) t (i )
z (2 (i ) t (i )
(
else
E x (i,n)
2(i) t (i)
2t
E x (i,n 1)
(H y (i,n 1 ) H yn (i 1, n 1 )
2(i) t (i)
z(2(i) t (i)
2t((i) o ) E xinc
2t (i)
E xinc
(2(i) t (i) t
(2(i) t (i)
Loop through all
of the H -grid
end
end
for i=2:Nx-1 % all interior nodes
H y (i, n) H yn (i, n 1)
end
end
t
E (i 1, n 1) E x (i, n 1)
(i ) z x
(
2-D FDTD Scattered Fields (TE)
sc
H xsc 1 E y o inc
Hx
t
z
sc
H zsc
1 E y o inc
Hz
t
x
E yinc inc
E ysc 1 H xsc H zsc
o
E ysc
Ey
t z
x
t
H ysc
n 1
n
(i, j) H xsc (i, j)
(
n 1/ 2
n 1/ 2
t
E ysc
(i, j 1/2) E ysc
(i, j 1/2)
z
t( o ) H xinc
(t nt, x ix,z jz)
t
H zsc
E
sc n 1/ 2
y
n 1
n
(i, j) H zsc (i, j)
(
n 1/ 2
n 1/ 2
t
E ysc
(i 1/2, j) E ysc
(i 1/2, j)
x
t( o ) H zinc
(t nt, x ix,z jz)
t
H sc n (i, j 1/2) H sc n (i, j 1/2) H sc n (i 1/2, j) H sc n (i 1/2, j)
2 t sc n1/ 2
2t
z
z
x
x
(i, j)
Ey
(i, j)
2 t
2
t
z
x
(
2t( o ) E y
2t
(t (n 1/2)t, x ix, z jz)
E yinc (t (n 1/2)t, x ix, z jz)
(2 t t
(2 t
inc
Implementation of Boundary Conditions 2D
Boundary condition for a perfectly electrically conducting (PEC) material
Ex(1, nt ) 0
1 nt Nt
( N z , nt )
Ex
0
Absorbing/open boundary condition in 1-D
Many different methods
• Interpolation/Extrapolation in time and space (Liaos)
• One way way equation (Mur)
• Artificial absorbing boundaries (PMLs)
One Way Wave Equation
1
2 2 2 2 E 0
x
c t
y
2
2
2
2
2
Dt
Dy
Dx
2
2
2
Dy Dx Dt E L{E} 0
2
L{E} L L {E} 0
One Way Wave Equation
L{E} L L {E} 0
2
2
D
D
Dx Dt 1 y Dx Dt 1 y E 0
D
D
t
t
L Dx Dt
L Dx Dt
Dy
1
Dt
Dy
1
Dt
2
Dx Dt 1 (S 2
2
Dx Dt 1 (S 2
One Way Wave Equation
L Dx Dt
L Dx Dt
Dy
1
Dt
Dy
1
Dt
2
Dx Dt 1 (S 2
2
Dx Dt 1 (S 2
If we could implement the one way equations on a FDTD boundary we
would have the perfect ABC (i.e. zero reflection. Unfortunately we
can’t do that since we don’t know how to implement the square root
operator. So we need to approximate.
1 (S 1
2
1 (S 1
2
First order Taylor series expansion
One Way Wave Equation
L Dx Dt
L Dx Dt
Dy
1
Dt
Dy
1
Dt
2
Dx Dt
2
Dx Dt
1
L E
2
E 0
c t
x
1
L E
2
E 0
c t
x
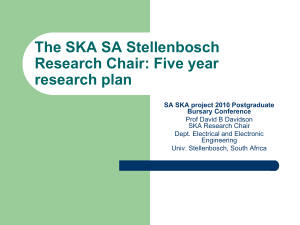
Absorbing Boundary Conditions 2D: Mur 1st order
One-way Wave Equations: They approximately represent waves traveling
in only one direction.
y=h
E 1 E
0
x c 2 t
E 1 E
0
y c 2 t
E 1 E
2
0
x c t
E 1 E
0
y c 2 t
y=0
x=0
x=w
Absorbing Boundary Conditions 2D: Mur
One-way Wave Equations: They approximately represent waves traveling
in only one direction.
y=h
E 1 E
E2n,j1 E1n, j 1 E2n, j E1n, j
E
1
2
0
x c t
x 2
x
x
n 1
n
n 1
n
E 1 E1, j E1, j E2, j E2, j
t 2
t
t
n 1
1, j
E
ct x n1 n
E
E2, j E1, j
ct x
n
2, j
y=0
x=0
x=w
Absorbing Boundary Conditions 2D: 1st Order Mur
2D 1st Order Mur Equation
y=h
1
Ein, Ny
Ein, Ny 1
E1n, j 1 E2n, j
ct x n 1
E2, j E1n, j
ct x
ct y n1
Ei , Ny 1 Ein, Ny
ct y
n 1
n
E Nx
, j E Nx 1, j
Ein,11 Ein, 2
ct x n 1
n
E Nx 1, j E Nx
,j
ct x
ct y n1
Ei , 2 Ein,1
ct y
y=0
x=0
x=w
Absorbing Boundary Conditions 2D: Mur 2nd Order
One-way Wave Equations: They approximately represent waves traveling
in only one direction.
y=h
2E 1 2E c 2E
0
yt c t 2 2 x 2
2E
1 E n 1 E n1 1 E i,Ny E i,Ny1 E i,Ny E i,Ny1
yt 2t x
x 2t
y
y
n 1
n 1
n1
n1
2 n
2 n
n 1
n
n1
n 1
n
n1
E 1 E i,Ny E i,Ny1 1 E i,Ny 2E i,Ny E i,Ny E i,Ny1 2E i,Ny1 E i,Ny1
t 2 2 t 2
t 2 2
t 2
t 2
2
y=0
x=0
2 n
2 n
n
n
n
n
n
n
2 E 1 E i,Ny E i,Ny1 1 E i1,Ny 2E i,Ny E i1,Ny E i1,Ny1 2E i,Ny1 E i1,Ny1
x 2 2 x 2
x 2 2
x 2
x 2
x=w
(MATLAB DEMO)