Report #2 - UH Red Devils
advertisement

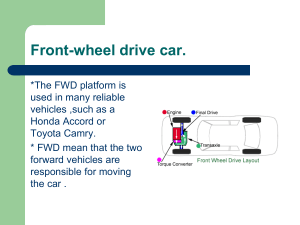
Formula SAE Hybrid 2015 Report #2 SENIOR DESIGN 1 Prepared by: Daulet Urkenbayev Paul Orieukwu Rajeev Bhattacharya Jonathon Fulbright Outline 1. Competition Objective & Team Goal -------------------------------------- 2 2. About Competition ------------------------------------------------------------- 3 3. Hybrid System ------------------------------------------------------------------- 7 4. Design Layout -------------------------------------------------------------------- 11 5. Frame Material ------------------------------------------------------------------ 13 6. Frame Design & Finite Element Analysis --------------------------------- 14 7. Modeled Parts for Computational Fluid Dynamics --------------------- 17 8. Differential ------------------------------------------------------------------------ 18 9. Internal Combustion System ------------------------------------------------- 20 10. Torque Calculations from IC -------------------------------------------------- 22 11. Suspension ------------------------------------------------------------------------ 27 12. Central Processor ---------------------------------------------------------------- 34 13. Battery management System ------------------------------------------------ 35 14. Tractive System ------------------------------------------------------------------ 36 15. Rear Motor ------------------------------------------------------------------------ 37 16. Front Motor ----------------------------------------------------------------------- 38 17. Rear Motor Controller ---------------------------------------------------------- 38 18. Front Motor Controller --------------------------------------------------------- 39 19. Battery ------------------------------------------------------------------------------ 40 20. Budget ------------------------------------------------------------------------------ 42 21. Gantt Chart ------------------------------------------------------------------------ 44 22. Work Breakdown Structure --------------------------------------------------- 45 23. Risk Matrix ------------------------------------------------------------------------- 46 November 6, 2014 1 Formula Hybrid SAE 2015 Competition Objective The Formula Hybrid competition motivates students from various universities across the world to design, fabricate and develop a high performance hybrid race car. Therefore, students are required to demonstrate their engineering knowledge and communication skills while working as one team. Many rules, restrictions and limitations are directly applied during the competition, however, all teams are still given a flexibility for innovative ideas and creativity. The competition is also intended to make students work on the disciplinary subjects such as Project Management. Overall, the competition is known as one the greatest program to demonstrate the true environment of industry where engineering knowledge and communication skills significantly matter. Team Goal Team Red Devils is going to officially represent the University of Houston at the Formula Hybrid SAE 2015 Competition. Registering for the competition before all the slots fill is the priority goal for the team. The competition slots are capped at 35 entries. The next goal is for finished curb weight not to accede 650 pounds. The actual overall weight of the car without the weight of driver is defined as curb weight. Team Red Devils will also develop and implement a switchable hybrid drive system. This system will enable the vehicle to operate in parallel or series hybrid modes. Data logging system will also be implemented in the project. Data logging system will provide the team with information needed to tune the car for performance. Once the goals mentioned are met, the team will complete the final assembly by the given deadline. On the day of the competition, the team’s top goal is to complete unrestricted 75 meter acceleration run in 5.4 seconds or less. November 6, 2014 2 About the Competition The Formula Hybrid competition is held every year by the Society of Automotive Engineers Collegiate Design Series. It is one of the most prestigious design competitions in the SAE series because it requires knowledge in various engineering fields such as mechanical, electrical, computer and even aerodynamic engineering. Formula Hybrid 2015 will start on April 27th, 2015 and finish on April 30th, 2015. Teams are required to earn the as many points as possible for the different event categories in three days. The competition is divided into two event categories: static and dynamic. The maximum allowable number of points for both categories, the competition as whole, is 1000 points. Static Events The first event category is Static Events. Static Events category includes two events. The first event is Presentation. Students are required to create and demonstrate a presentation on their team’s ability to structure and execute a project management plan with project goals. The presentation should demonstrate the work that was planned and executed on time and in the most efficient manner. Maximum number of points in Presentation = 100 points. The second Static event is Engineering Design. This event challenges team to prove why their design should be considered as the best design. Also, the team should demonstrate the full understanding of the design and illustrate use of good engineering practices to meet the design goals. Maximum number of points in Engineering Design = 200 points. November 6, 2014 3 Dynamic Events The second event category is Dynamic Events. The Dynamic Events category is comprised of four separate events. Acceleration-Electric is the first event in the category. In this event, the car has to complete a distance of 75 meters (82 yards) on a straight path track in the quickest time using only electric power stored in accumulators. Maximum number of points Acceleration-Electric = 75 points. In Acceleration-Unrestricted the same rules apply; however, the source of energy is allowed to be both internal combustion and electric power. Maximum number of points Acceleration-Unrestricted = 75 points. The next event in the Dynamic Events category is Autocross. The car’s maneuverability and handling qualities are tested in Autocross event. Also, the overall driving performance of the car such as acceleration, braking, and cornering are tested as well. Maximum number of points Autocross = 150 points. The last event in the category is Endurance event. This even evaluates performance, as well as reliability and efficiency. Covering the most distance using the least amount of fuel in the least amount of time is the goal for the Endurance event. Maximum number of points Endurance event = 400 points. The team that earns the most number of points, out of the 1000 possible, will be considered as the 1st place winner of the competition. November 6, 2014 4 Top Teams of 2014 There are only 35 teams allowed to register for Formula Hybrid SAE competition. Out of 35 teams only 3 teams can be placed on the top. According to the 2014 Formula Hybrid Summary Score Sheet, the University of Idaho was been awarded first place in Formula Hybrid Awards for 2014. Their team placed with the top score of 261.70 in the competition. University of Idaho collected 261.70 points out of 1000 to be placed on top of the competition. The University of Idaho scored 83.44/100 in the Presentation Event, 178.17/200 in Design Event, 0/75 in Acceleration Electric and Unrestricted respectively, 0/150 in Autocross Event, and 0.08/400 in Endurance Event. Lawrence Technological University was placed second in the competition. Their scores were 56.19/100 in Presentation Event, 148.95/200 in Design Event, 0/75 in Acceleration Electric and Unrestricted respectively, 0/150 in Autocross Event, 48.48/400 in Endurance Event. Lawrence Technological University total score was 253.63/1000. The third team to be placed in the competition was Embry-Riddle Aeronautical University. Their team has scored 100/100 in Presentation Event, 151.35/200 in Design Event, 0/75 in Acceleration Electric and Unrestricted, 0/150 in Autocross Event, 0/400 in Endurance Event. Lawrence Technological University total score was 251.35/1000. McMaster University was penalized 100 points in one of the competitions which prevented them from placing the first in the competition. November 6, 2014 5 Top 3 Hybrid Only Teams of 2014 Place University/College Points out of 1000 1st University of Idaho 261.7 2nd Lawrence Technological University 253.63 3rd Embry-Riddle Aeronautical University 251.35 November 6, 2014 6 Hybrid System A hybrid system is a type of drive train system that uses two or more propulsion systems. The type of a hybrid car is determined by the path(s) of energy from some reservoir(s) to the road. There are two main types of hybrid systems commonly implemented; parallel and series. A more detailed explanation of each individual system is described below. Series Series Hybrid System has a reservoir with fuel that supplies an internal combustion engine (ICE) (see Pic 4.1). The ICE converts fuel into mechanical energy that turns a generator. The generator turns mechanical energy into electrical energy that runs motors and/or charges batteries. Picture 4.2: Parallel Hybrid System Layout Advantages of Series: The engine can run at optimum efficiently regardless of vehicle speed to achieve minimum fuel consumption. Smaller Horsepower engines may be used. Engine and generator can be located anywhere in the vehicle. Disadvantages of Series: November 6, 2014 7 The required generator is heavy and is dead weight when the batteries are fully charged. The capacity of the generator plus the battery maximum power must equal to total power of the HEV. The traction that motor must have power equal to total vehicle power for propulsion. Series conversion of energy: Chemical Mechanical Electrical Mechanical Series energy flow: Gas engine Electrical Generator Electrical Motor Differential Gears All mechanical power is converted to electric and then it is converted back to mechanical. Losses occur at each conversion. Parallel A Parallel Hybrid System has two propulsion systems parallel to each other (see Pic 4.2). Both systems are connected to one driveshaft at the end. On one side, the system has a battery that supplies power to the electric motors. The electrical motor rotates the driveshaft. Then driveshaft initiates the movement of the car. On the other side of the parallel layout, the reservoir stores fuel for the internal combustion engine. The engine converts fuel into mechanical energy and supplies it to the driveshaft. In this configuration both internal combustion and electrical energy systems are simultaneously used to rotate the driveshaft. November 6, 2014 8 Picture 4.2: Parallel Hybrid System Layout Advantages of Series: A direct mechanical connection can be made from the motor/generator to the drive wheels. Single energy conversion for both electrical and mechanical Heavy component of generator is not required Operate with engine alone or electric motor alone or combination of both for maximum power Can respond to large instantaneous changes in torque Disadvantages of Series: Heavy weight due to power train parts such as clutches and transmission. Three shaft transmissions is required Engine rpm varies which causes difficulty in control and affects fuel consumption Choices to location of engine are limited since has to be mechanically linked to the driveshaft Parallel conversion of energy: Engine Mechanical Driveshaft Mechanical Motor ElectricalDriveshaft Mechanical Parallel energy flow: November 6, 2014 9 Gas engine Three Shaft Transmission Differential Gears Electrical Motor Three Shaft Transmission Differential Gears Fewer losses occur than in series since the energy is applied directly to three shaft transmission. November 6, 2014 10 Design Layout Team Red Devils is required to come up with some outlook on what type of hybrid system to use for the car. The outlook just shows what possible hybrid system can be used in order to achieve maximum performance and efficiency for the race car. Since there are two types of hybrid, the team believes implementing both types would be very advantageous. Indeed, the system is called parallel-series hybrid system or mixed hybrid system. The layout of the parts for such system is shown below: Picture 5.1: Mixed Hybrid System Layout We have excluded hub motors from the design. While the hub motors that were considered are up to 85% efficient, this is relatively low for electric motors. The added unsprung weight they produce is also a problem. We think it could make the car unstable over bumps, and difficult to steer. The only hub motors we have been able to find are from an unreliable source. With our current design layout, the front motors produce all of the traction force in series mode. Thus, faulty motors or motors that do not arrive take away our dual mode capability. November 6, 2014 11 We will still pursue AWG, but by use of a gearbox mounted somewhere on or in the hub of the front wheels. This allows us much more flexibility with motor selection. However, this adds to the unsprung weight problem. Now we have a motor and a gearbox unsprung. We could potentially remedy this problem with a well-designed suspension, and we have found that Illinois Tech used this reduced hub mounted motor layout on one of their cars. We should pay attention to what they’re doing because one of their industry advisors literally wrote the book on hybrid vehicles. November 6, 2014 12 Frame Material In the formula hybrid competition there are a variety of materials that the SAE allows teams to use. Steel, aluminum, and composite material are allowed. The three types of material that we are considering for the vehicle are steel, aluminum, and carbon fiber, a composite material. The factors that we considered in our selections were cost, weight, overall strength, workability, and feasibility. The first material we looked at was steel. Steel is a more cost effective route compared to the other materials. Even though, some types of steel are actually more expensive. Aluminum is a lighter and less dense material than steel, but has less strength. Aluminum may be heavier than steel because, to achieve required strength of an aluminum tube, the thickness of the material needs to be increased. The elastic material of carbon fiber is stronger than aluminum and steel, but is expensive and requires special working procedures. Overall, steel is more feasible than the others. Aluminum has to be heat treated to increase its strength if it has to be welded and carbon fiber takes a longer period time to put together and needs to be precisely done. When it comes to creating a tube design for the SAE Formula Hybrid frame, there is one concept. The only difference is that teams adjust the design to their individual team member’s body structure. In the images below there are three different designs from Lawrence Tech, University of Houston, and University of Idaho. We will use this concept and modify it to our team’s body structure. November 6, 2014 13 Finite Element Analysis (FEA) on Frame In this section of the presentation, the frame, body, and aerodynamics of the vehicle will be discussed. Key aspects such as optimization and drag coefficient will play a very important role in the process of the teams design. In the first presentation we presented three different concepts and ideas pertaining to the design of the frame and the body of the formula hybrid vehicle. In this presentation will discuss the teams design, FEA, and optimization from frame 1 to the final design. The SAE rules allow teams three different types of material, which are steel, aluminum, and carbon fiber (composite material). The team selected steel due to its strength, weight, feasibility, and cost. Compared to aluminum and carbon fiber, steel material fares well in all four categories. Also, carbon fiber is too expensive and not as feasible, while aluminum is not as strong and can be inconvenient for that fact that it needs to be heat treated after welding. In designing these frames, certain aspects of the car played a key role in its design and none more important than the suspension geometry. From the suspension geometry, the vehicle ride height, center of gravity and other aspect that effect the handling of the car can be determined, from there the frame can be designed and analyzed. The team originally designed two frames that were constructed based on the components that the team planned to use and without knowing proper way to design the vehicle. As seen we started off with a basic model (figure 1) and tried to optimize the structure by making it stronger while still maintaining a low weight with the second model (figure 2). The third model (figured 3) is the optimum design and the final design. By remodeling and optimizing the structure, it became stronger and even lighter in weight. November 6, 2014 14 Frame 1 Frame 2 Frame 3 Analysis was conducted on the frame, simulating front impact, side impact, and torsional rigidity. These are simulation that the SAE board at the competition wants teams to show how strong their structure is and if it can hold up against in a case of an impact. In conducting these simulations, we want to see the amount of displacement that is created as a force applied to the structure. Even more importantly, you want to see the max amount of stress (von misses) created on the frame and the max stress needs to be less than the yield stress or the structure will be deemed unsafe. We first conducted the front impact test and the stress that was produced was less than the yield strength, meaning that the structure will be able to handle an impact with a speed of 30 miles per hour. When conducting this simulation, we applied a force of 19.45kips based off the average speed of 30mph and the estimated total weight of 50lbs of the vehicle. Though the frame is considered safe it still needs to be improved due to its high stress in the bulkhead area. Secondly, we conducted the side impact test and are still running test on it, since the stresses that are being produced are higher than yield stress of the material. When conducting this simulation we applied a force of 15.054kips based off the average weight of SAE car which are estimated to be 500lbs and the average speed of 30mph the opposing car will be travelling. It is experiencing high levels of stress at the load points but should be minimized when battery box is implemented to the structure of the frame. Lastly, the team conducted a torsional rigidity test which was able to hold up against the forces that were applied on it. When conducting this simulation, we applied a force of 425lbs based on the total November 6, 2014 15 weight of the car (650lbs) plus the weight of driver (200lbs) divided by two. That means that the frame is able to withstand dynamic loading for certain period of time. FEA Front Impact FEA Side Impact FEA Torsional Stiffness November 6, 2014 16 Modeled Parts for Computational Fluid Dynamics In designing the body of the vehicle, one aspect that is really important is the drag coefficient. The drag coefficient can be reduced based on the frontal area of the vehicle. Drag is very important meaning that the more drag force that your car experiences the more force that your system will have to produce. That is something that team wants to mitigate. Additionally, the team looked at the possibility of adding aerodynamic devices such as a diffuser, front wing, and a rear wing to increase the downforce pressure applied on the car. These components represented below are still concepts and are being modified to be more aerodynamic. Body Diffuser Front Wing These are all important aspects because these parts can affect the performance and efficiency of the vehicle. So that when the team is able to compete at the race, we will not only score well in the design events but also in the dynamic event. November 6, 2014 17 Differential The differential is a vital part of the drivetrain system which translates the power to the wheels through gears. The drive gear is also known as the final reduction gear as it is the end of the power path in a certain plane. It takes the power and translated it into the perpendicular plane to different paths of output, in our case the 2 rear wheels. The differential also allows the power transfer between the two wheels to change during a turn. The inner wheel will spin slower in the turn as the outer wheel will need to spin faster to keep up. Without the use of spider gears and idler gears this would not be possible. The strength and size of the gear internally are dependent on the amount of torque and rpm they will be subjected to. This why the team needed to calculate the final output torque or wheel torque we hope to achieve so that the most suitable differential could be selected. Torsen Traction Taylor Industries Westgarage Engineering Torque – 600 ft-lb Torque – 800 ft-lb Torque – 680 ft-lb Weight – 15lbs Weight – 10lbs Weight – 10lbs Cost - $415 Cost - $2600 Cost - $1000 Table 2 Figure 6 The team has decided based on cost weight and torque that the Westgarge configuration will be best for our application. The team has discussed about designing its own differential using the principles seen in this image. The manufacture is taking differentials from front wheel drive cars and designing an November 6, 2014 18 enclosure to work with a sprocket and selling than for chain drive applications. The concept is the end caps will attach to ready made parts by common auto manufactures. The design is mirrored and attempted in other formula SAE cars and seems to be cost effective. November 6, 2014 19 Internal Combustion System Formula Hybrid Rules: Internal Combustion engine must be four-stroke, piston engines, with a max displacement 250cc. Modifications may be done to the engine, but move it into the modified engine category. The specific modifications that refer to our design are to the fuel mixture and intake systems. The organizers reserve any right to tear down any number of engine parts to confirm conformance to the rules. Each motor must be equipped with an onboard starter and be able to start unassisted from outside source. Air intake duct must lie within the boundaries outlined in the rule book. Any air intake manifold system must be secured to the engine with fasteners. Air filters can be cantilevered from the throttle body. Description: The internal combustion engine will be used to add power to the differential when the electrical energy is depleting and when we desire more power. The Formula hybrid competition restricts us to 250 cc displacement for gasoline engine and 325cc for diesel engine. The engine must also be powered in 4 stroke cycles. The engine may have modifications that meet regulations and are open to inspections by the judges at any time. The engine will be rear mounted and driving the car from the rear. Subaru EX21 Lifan V-twin Kawasaki 250r HP – 7 HP – 16.5 HP – 28 Torque – 4 ft-lb Torque – 13 ft-lb Torque – 13.67 ft-lb Cost – $479.97 Cost - $1099 Cost - $650 Table 1 Kawasaki 250r November 6, 2014 20 Figure 1 The 2012 Kawasaki 250r engine will be placed in the car based on the displacement and the gear reduction in the transmission and the cost for purchase. The engine is also wide used and common and the team is hoping to find a possible donation engine from a mechanic shop. The engine is so popular that modification kits are offered to convert over to electronic fuel injection which will allow the electrical controllers to communicate better due to more input from electronic fuel injection system. This is going to allow the team to make the engine perform the way we desire based on either acceleration or efficiency. Fuel Injection System The engine is coming from the manufacture with a carburetor installed as the fuel injection method. The electronic fuel injection system requires an ECU which will store and interpret input. The input it takes in will make mapping diagrams which we hope will be able to make torque maps for the electronic system to read and interpret to allow the electric system work in sync with the internal combustion engine. Electronic Fuel Injection kit November 6, 2014 21 Figure 2 Torque calculations When the engine was selected the team wanted to learn the torques being outputted to the wheels and differential. The torque is used to determine the power that will be moving the car and if the final drive gear reduction is large enough. The larger the gear reduction the more the torque is multiplied but less top end speed the vehicle will be able to achieve. To determine to true value of torque and the max RPM reached to achieve the maximum torque the team looked into dyno charts. Dynos can be configured to output wheel torque, which is the direct toque being read at the dyno wheel. Just as results can be changed in FEA software the same applies to dyno software. I dyno technician can input the final drive gear reduction ratio and accelerate the engine in a transmission reduction ratio of 1:1 to plot a curve that can output engine HP and Torque outputs based on RPM. Figures 3-5 show different year curves of the Kawasaki 250r engine. The team decided to average the max torque output and RPMS to give us an idea since the specific year engine has not been acquired yet. November 6, 2014 22 Figure 3 Figure 4 Figure 5 These dynos were used to help the team understand the different torque outputs at different transmission gears as well as HP and constant acceleration at the wheels at max rpm per gear. The dynos were found by doing some simple google research. November 6, 2014 23 November 6, 2014 24 November 6, 2014 25 These Calculations all assume no mechanical losses and in the real world that is not true. In a welldesigned drivetrain system the losses can be anywhere from 10% - 15%. I will assume 15% losses for worst case scenario. Once the internal combustion engine torque was calculated I than added this torque to the AC electric motor max torque output which is 100 ft-lb before the wheel. The AC motor is significantly stronger than the internal combustion engine which is outputting 34.75 ft-lb in first gear at max RPM. By adding the two max output torques of the power systems we get 135 ft-lb rounded. When this is multiplied to the final drive gear reduction found on a common motor cycle of 1:3.214 the team will be achieving 434 ft-lb of torque at the differential and 217 ft-lb per tire in the rear. The team will need to select a differential that will be able to handle the load of 434 ft-lb by a factor of 2 for safety. November 6, 2014 26 Suspension Geometry The geometry of the suspension is vital to understanding the expected handling and control of the car. The team researched deeply into understanding the importance of the desired goals suspension offers to the car. In a race car application such as this it can mean seconds in a lap or even poor steering. The geometry designed to optimize handling triangulates certain key points in space based on chassis design, ride height, center of gravity (CoG), roll center, track width, tire diameter, rim diameter, and so many more imaginary points and angles. These points and angles will be discussed using picture aids to refer back to. The team determined the dimensions needed to fit the components in the chassis, the desired ride height, and the track width of front and rear. All suspension design was than designed to enhance handling on the chassis. Figure 1 shows the dimensions the team came up with to allow for component placement. The front geometry figure will have the desired track width shown and the rear geometry figure will show the desired track width. The figures show the length of the outer boundary of tires. The rules for Formula Hybrid state that the track width of the rear must be 75% as long as the fronts track width. The rim size the team has decided to use is a 13x7 inch rim. The tire will be a 20x7R13 Hoosier tire. The droop and bump that the team has determined to allow is 1 inch. These can be seen in figures 2-5 indicated by red lines parallel to the lower chassis boundary. I will list a definition table at the end of the discussion to help understand key terms. The first triangulation to determine is the how to reduce the roll radius. The roll radius is the distance between the roll center and the CoG. This distance will act as a moment during the corning when the weight of the car wants to roll left or right. When it comes to decreasing the roll radius the center of gravity can’t be moved dramatically. It can only move small increments based on component placement. However the roll center can be dramatically moved based on the angle created between the chassis mounting point and upright mounting point of upper control arm (UCA). This can be seen in figure 2 where the blue line represent the imaginary lines to determine best possible angle based on ride height and chassis dimension. The Brown lines are the UCA. Though the roll center could be moved to basically as close as you like to the CoG the important limiting factor is that you do not want the roll center to be sitting in or on the chassis. This means the ride height of 2.5 inches the team chose is the maximum allowable displacement from ground. The roll center can go negative, meaning in the November 6, 2014 27 ground, but this would increase the moment arm length, or roll radius. The roll center in the front is sitting at 1.65 inch from the ground based on the track length chosen. The rear roll center is sitting at 2.43 inches from the ground as seen in figure 3. The lower control arm should always be parallel to the ground and the angle is set based on that parameter. Once the angles for the UCA had been found for both the front and the rear the actual length of the arms needed to be determined. This is done by determining the kingpin angle. The kingpin angle is the angle created when drawing a line from the lower control arm (LCA) to the upper control arm. This angle is needed to create a scrub patch on the tire that will allow for more contact to the roads surface. The front scrub patch needs to be small due to the turning forces. The forces acting on the scrub patch in front during a turn can make it hard to steer and control the steering wheel in the turn. So a balance needs to be found and determined. After reading many books and articles it is found that a kingpin angle of 7-8 degrees is an optimal design. The kingpin angle also controls camber as the tire experiences a bump. In Figures 3-5 you can see a green line which portrays the desired camber angle of 2 degrees. Camber can always be adjusted once set but doing so will also lower the vehicle which can cause problems with the desired bump and droop. Maintaining these angles will need to be secured in the spring load. Figure 1: Rear Chassis Design November 6, 2014 28 Figure 2: Front Chassis Dimension Figure 3: Front Roll Center Location November 6, 2014 29 Figure 4: Rear Roll Center Location Figure 5: Front Suspension Geometry November 6, 2014 30 Figure 6: Rear Suspension Geometry Figure 7: Steering Angles and Caster Key Terms: Suspension Geometry Ackerman angle – A geometric arrangement of steering linkages which ensures that the longitudinal center line of both steered wheels are tangential to the path on which the travel when cornering. November 6, 2014 31 Bump – The allowable upward wheel travel from normal ride height. Bump Steer – Rotation of the front or rear wheel around the steering axis due to movement of the suspension. Camber – The angle between the line passing through the center of the wheel looking from front to rear and the true vertical line. If the angle is leaning inward towards car the angle is said to be negative. If the angle is seen to be leaning outward of car it is said to be positive. Caster – The angle between the line of the steering axis and the vertical when viewed from the side. (Figure 6) When the tire angle is leaning to the rear of the car it is said to be positive. When the tire angle is leaning towards the front of the car the angle is said to be negative. Droop – Allowable downward wheel travel from normal ride height. Drive – The tendency for the front end to approach ground under braking conditions. Kingpin Inclination – The angle between a line drawn through the center of the upper and lower ball joints and the true vertical when viewed from front to rear. Roll – A tendency for the suspended mass of the vehicle to lean outwards when cornering. Squat – A tendency for the rear end to approach ground under acceleration conditions. Track Width – The distance between the centers of the contact patch of one wheel to the other on the same axle. This distance changes during suspension travel and therefore is measured at normal ride height. Upright – The steering/suspension component which incorporates the upper and lower steering bearings and steering arm and wheel bearings. Wheelbase – The distance between the rear center contact patch and the front center contact patch. Wishbone – Essentially a triangular structure pivoting at two inner points on the chassis and at on point on the upright. The suspension arm configuration also called the A-arm. The suspension geometry is a living configuration that is constantly changing based on the track conditions and the trial runs that are given. The tire pressure and so much more are all critiqued to allow for the optimal handling. The spring load and rate will be set and determined based on the distribution of sprung weight on each tire and the unsprung weight of each wheel assembly. These will not be changed once selected and because of this a few calculations will need to be done to determine November 6, 2014 32 the correct spring load, spring rate, and dampening rate. The dampening rate can be adjusted through chargeable configurations and or by custom mods by a professional tuner. November 6, 2014 33 Electric Power and Control Systems Electrical System The Electrical System is comprised of two different parts. The Control System takes input from the driver and an array of sensors to direct the operation of the Traction System. The Control System is made up of one central control unit and several sensors located on the engine, motors, and batteries, as well as driver input devices including the brake and gas pedals as well as cockpit switches. The Tractive System applies torque to the wheels. Positive torque is applied when the vehicle is accelerating and negative torque is applied when braking. The Tractive System uses the negative torque to generate current which is then used to recharge the battery in a process called regenerative braking. This system in comprised of 3 electric motors and 3 motor controllers. Control System Components Central Processor The central control unit is a microprocessor which reads digital and analog inputs to determine the best course of action by the Tractive System. This microprocessor sends directions to the motor controllers using similar analog signals. This devise will also conduct data logging procedures. The most promising microprocessor the team has identified is the myRio, by National Instruments. This device is of commercial grade quality and features a built in accelerometer and WiFi adapter. The myRio is also designed for seamless integration with LabView. November 6, 2014 34 Inputs/Outputs Input Power myRio Raspberry Pi B+ Arduino Mega 40 Digital I/O 40 Digital I/O 54 Digital I/O 10 Analog Out (15 PWM) 6 Analog In 16 Analog In 6 – 16 VDC 5 VDC 7 – 12 VDC 14 Watt 5 Watt 15 Watt Clock Speed 667 MHz 700 MHz 16 MHz Cost $250 $70 $30 (Table 1) (Figure 1) National Instrument’s MyRio has been selected from these three options because of its Analog I/O pins and its ability to work directly with Labview through USB. Since it is the most expensive option special care will have to be taken to ensure its circuitry is not destroyed by over current or over voltage. Battery Management System The Battery Management System (BMS) constantly measures operating conditions of each battery cell. This system is critical to maximizing the battery’s life and ensuring safe charge and discharge. The BMS November 6, 2014 35 has the ability to turn off the entire system if battery current, voltage, or temperature is found to be outside safe operating parameters. This system will provide the CCU with live information which will be recorded for data logging purposes. BMS Options Orion BMS Lithiumate MBS-EP128 MK3x8 miniBMS Cost $890 $795 $425 $320 $300 FH Rules Y Y Y N/A N/A (Table 2) (Figure 2) The team has selected the Lithiumate as the best option for the Battery Management System due to its CAN Bus capability, USB and RS232 ports, data logging capability, lower prices, and compliance with FH Rules. Tractive System The Tractive System is composed of all the elements that provide torque to the wheels. The electrical portion of the tractive system is comprised of three electric motors and the three motor controllers that power them. Two matching motors will be used to power the front wheels. One motor will be coupled to each wheel by a chain drive. The rear wheels will be driven by the internal combustion engine and one electric motor. The electric motor in the rear will also function as a generator when not supplying torque to the wheels. November 6, 2014 36 Rear Motor AC 12 ME 1118 ME0909 Type AC Induction PMAC PMDC Power (Peak) 33 kW 14 kW 15 kW Cost Donated $1,895 w/controller $385 w/o controller (Table 3) (Figure 3 The AC 12 has been selected because of its superior power and availability. The AC Induction type motor also lends itself to regenerative braking. Front Motors Perm 132 Liquid Cooled BLDC ME0909 Type Brushed DC BLDC Brushed DC Power (Peak) 14 kW 10 kW 15 kW Cost Donated $918 w/ controller $385 w/o controller (Table 4) November 6, 2014 37 (Figure 4) The Perm 132 has been selected for the front wheel drive system because of its size, high torque capability, and availability. However, PDC motors make regenerative braking more difficult to implement. Motor Controllers Motor Controllers are broadly separated into two categories; converters and inverters. Converters drive a DC motor by varying DC current or voltage. Inverters drive AC motors by varying the frequency of alternating current. Inverters are much more complex than converters but offer many advantages. The team will be employing both technologies on their vehicle. In the rear to drive the AC 12 an inverter, and in the front to drive the two Perm 132s, two converters. Rear Controller Curtis 1239E Sevcon Gen4 Kelly KBL96201 Type AC Induction AC Induction/PMAC BLDC Regen Y Y Y Cost Donated $1050 $459 (Table 5) November 6, 2014 38 (Figure 5) The rear controller selected is the Curtis Model 1239E. This controller uses Field Vectoring or Indirect Field Orientation to determine the position of the rotor and controls the frequency accordingly. This Controller also offers a configurable CAN Bus connection and integrated system controller which makes this unit capable of controlling more than one device. It operates at 96 VDC and 650 A input power, giving a maximum of 83 HP. This controller has been chosen because of its advanced system control capabilities, high output power, regenerative braking function, and its availability. Front Controller Kelly KDZ12401 RoboteQ HDC2472 Kelly KBL96201 Type PMDC PMDC BLDC Regen Y N Y Cost $479 $795 $459 (Table 6) November 6, 2014 39 (Figure 6) The best controller for use in the front wheel drive system is the KDZ12401 by Kelly Controller. This controller is one of the few PM controllers capable of regenerative braking. It has a high range of input voltage which allow it to adapt to our 96 V system. It is imperative that the front motors are regen capable since they will be the only motors coupled to the wheels during series operation. Battery LiFePO4 Li Polymer Lead Acid Cell Capacity 8 Ah 2.8 Ah 12 Ah Size 38120 18650 6 in x 2in x 3.7 in Cost ~ $3000 ~ $3000 ~ $1000 (Table 7) November 6, 2014 40 (Figure 7) The cylindrical LiFePO4 batteries have been selected as the best option. This chemistry is subject to much fewer requirements by the FH Rules than any other Lithium based chemistry. These 8 Ah cells will be coupled in groups of 7 in parallel to achieve 56 Ah total. The 8 Ah size allows us to get as close to the allowed energy without going over. Further this battery is capable of 10C discharge, comparable to many more expensive and more dangerous Lithium chemistries. November 6, 2014 41 Project Management Budget Components Low High Frame and Body $300 $2,500 Steel Tubing $300 $600 Fiberglass Shell Donated $400 Cost of Construction Donated $1,500 Internal Combustion $630 $2,700 Engine $450 $2,000 Upgrades and Modifications Excluded $300 Hoses and Connections $80 $100 Exhaust $100 $300 Electrical System $5,650 $16,200 DC Electric Motors Donated $2,000 DC Electric Motor Controllers $1,400 $2,000 AC Induction Motor Donated $1,200 AC Induction Motor Controller Donated $3,000 Input/output Transducers $800 $2,000 November 6, 2014 42 Cables and Connections $200 $500 Batteries and Battery Management System $3,000 $5,000 Central Controller $250 $500 Drivetrain and Suspension $1,800 $7,200 Axels, Bearings, and CV Connections $500 $2,000 Chains and Sprockets $300 $600 Differential and Electric Clutch $1,000 $3,000 Wheels and Tires Donated $1,600 Travel Expenses $0 $4,400 Truck and Trailer Rental Donated $1,200 Lodging and Food Donated $1,200 Gas Donated $2,000 Entry Fee $2,150 $2,150 Total $10,530 $35,150 November 6, 2014 43 Gantt chart November 6, 2014 44 WBS November 6, 2014 45 Risk Matrix November 6, 2014 46 Sources CPU: http://www.ni.com/myrio/ BMS: http://elithion.com/lithiumate_pro.php Controllers: http://curtisinstruments.com/?fuseaction=Products.home#/motorcontrollers/64 http://kellycontroller.com/kdz1240124v-120v400apm-with-regen-p-1027.html Batteries: http://www.evassemble.com/index.php?main_page=product_info&cPath=2&products_id=20 Engine: http://craig.backfire.ca/pages/autos/horsepower http://www.ecotrons.com/products/kawasaki_ninja_250cc_fuel_injection_kit/ http://www.motorcycle.com/gallery/video.php/v/main/reviews/2010-kawasaki-ninja-250rreview/2010-kawasaki-ninja-250r-hp-torque-dyno-1.jpg.html http://www.motorcycle-usa.com/64669/Motorcycle-Photo-Gallery-Photo/2011-Kawasaki-Ninja-250RComparison.aspx https://www.google.com/search?q=kawasaki+250r+dyno&espv=2&biw=1366&bih=624&tbm=isch&so urce=lnms&sa=X&ei=Ow5bVNaaCYOmyAToh4HIDg&ved=0CAcQ_AUoAg#facrc=_&imgdii=_&imgrc=u2 RfIBCHPvzLPM%253A%3BSHyqMuwmlqqZwM%3Bhttp%253A%252F%252Fs1.cdn.autoevolution.com% 252Fimages%252Fnews%252Fgallery%252Fdyno-shows-ninja-636-superiority-over-the-old-599cc-zx6r-video_2.jpg%3Bhttp%253A%252F%252Fwww.autoevolution.com%252Fnews%252Fdyno-showsninja-636-superiority-over-the-old-599cc-zx-6r-video-52351.html%3B1152%3B648 Differential: http://www.westgarage.co.uk/forsale/kits/kit4.html November 6, 2014 47 http://www.taylorrace.com/items.cfm?category=Chain%20Drive%20%20%2F%20FSAE&subcategory1=Taylor%20Race%2 0Chain%20Drive%20Differential&subcategory2=Configurations%20With%20The%20Steel%20Endbell SpeedPro Series “How to Build Motorcycle-engine Racing Cars” by Tony Pashley “Chassis Engineering” By Herb Adams November 6, 2014 48