D.Ward,Assumption,Options and Risks for an MIFE DEMO
advertisement

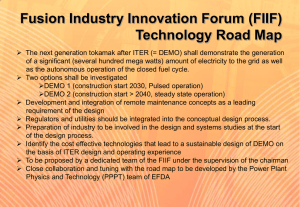
Assumptions, Options and Risks for an MFE DEMO D J Ward CCFE Culham Science Centre Abingdon, OX14 3DB, UK CCFE is the fusion research arm of the United Kingdom Atomic Energy Authority Overview • This is a personal view, intended to motivate discussion. • Just as systems integration can force changes in our view of what an optimum design of individual component looks like, including development timescale and risk can change our view of what an optimal DEMO looks like. • Basic Theme: early, low tech DEMO, designed to minimise development time, cost and risk, at the expense of having an increased capital cost compared to a later, more advanced plant. Outline • • • • • • Balancing Development and Timescale What is the Lowest Tech Solution? Pulsed operation? Cost/Value of Current Drive Steady state, Advanced Physics/Technology Conclusions Balancing Development and Timescale This assumes that development takes time. It also costs money and increases risks of failure. Note that this is not a roadmap! What is the Lowest-Tech Solution? • A DEMO device without current drive and with low first wall heat loads, particularly on the divertor, appears at first sight to minimise the challenges, from the plasma side and heat flux side. DEMO Gen1. • What about effects of pulsing on magnets, first wall, blanket and divertor? • By reducing stresses and extending the pulse length, it may be possible to achieve a reasonable fatigue life. • How much attention should be paid to energy storage to turn this into a power plant with steady-state electrical output? Largely neglected here. Purpose of Low-Tech DEMO Gen1 • This would serve as a starting point for DEMO, to focus research activities, and measure progress as developments are made. • Advantage that it would be deliverable in a shorter time. • Risk that it will portray fusion as un-competitive (but what is the comparator?). • Risk that it will be an inappropriate focus for research activities, i.e. may distract from a more long-term target. How Many Pulses Expected? • TF coils need to tolerate cyclic stresses imposed by cycling PF. Over a 30 year lifetime, an 8 hour pulse length would give around 30,000 pulses, 1 hour pulse length around 200,000. • Central solenoid needs to tolerate twice this number of pulses due to swinging from full current to full, opposite current. Imposes similar stresses on other coils. • For a 5 year blanket lifetime and a 75% availability, need the first wall and blanket to survive 4,000 pulses at 8 hours pulse length, 30,000 at 1 hour. • Divertor, 2 year lifetime, target 1,500 at 8 hour pulse length, 12,000 at 1 hour. Generic First Wall Model Vizvary et al SOFT 2010 Generic First Wall Model - Temperature Results 0.5MW/m2. Eurofer. First Results • The helium cooled cases have higher temperatures and temperature gradients, leading to higher cyclic stresses. • All of the water cases have low enough stresses to exceed the target lifetime for an 8 hour pulse length and most even for a 1 hour pulse length. • Almost none of the helium cases achieve the target lifetime for an 8 hour pulse length. • However, the water models as studied have too low a temperature to avoid radiation embrittlement – as always reality is more complex! Systems Study Result - Pulsed This example assumes that 100 MW of heating is used as current drive in the flat top, to extend the pulse length. Is it better to achieve pulse length with inductive flux or can non-inductive support be useful? Cost of Current Drive • Many ways of looking at this but here is an illustration. • Imagine a pulsed DEMO with 8 hour pulse length (30,000 lifetime pulses) and some supporting external current drive. • What is the marginal cost of driving an extra 1MA by inductive or by non-inductive means? Inductive • An extra 1MA will need around 0.003V extra loop voltage. • This will need an extra 100 Vs flux swing. • If the OH coil were around 3m inner radius then this would need to increase to around 3.3m to provide the flux swing. • This would increase the major radius by around 5% and the total device cost by around 10%. • (Results based on range of systems studies, but intended to be generic). Non-Inductive • Under DEMO conditions and with current drive γ of 0.25 – 0.5, a marginal current of 1MA would need an extra 15-30 MW of CD power. • Based around ITER costs and systems studies, this is likely to add 1-2% to the plant cost. • The device has to increase slightly in size to provide the extra power needed for the current drive system but, overall, external CD is around 5 times cheaper than inductive current drive, at least in this marginal example. (More work needed to check how general this). Result of Systems Study – Supported Pulse 10 Major radius (m) 9 8 7 6 0 20 40 60 80 100 Percentage of Full Current Drive System included Allowing increasing amounts of CD power suggests that size (and cost) reduces as the current drive power is increased. (Suggests that a steadystate device is generally the better option.) Alternatively a fixed size device can have its pulse length varied by adding some current drive power. This may be the solution to achieve sufficient fatigue life. Use Current Drive to Extend Pulse Length Noninductive current fraction 60% 70% 80% Major radius (m) 9.6 9.6 9.6 Plasma current (MA) 18 18 18 Fusion Power (GW) 2.7 2.7 2.7 CD Power (MW) 83 116 147 Pulse length (hours) 5.5 7.2 10.7 Lifetime pulses 36,000 28,000 19,000 Fixed device size but use current drive power to extend the pulse length and achieve the required fatigue life. Divertor Heat Load Div heat load (MW/m2) 18 16 14 12 10 8 6 4 2 0 0 20 40 60 80 100 120 Percentage of Full Current Drive System Using current drive to support the pulse length, reducing the device size increases the divertor challenge. Mitigating action needed, e.g. impurity seeding. What if a related device were taken to full steady-state? Systems Study Example – Steady State This is an example of high current drive (~200MW) steady-state rather than an AT option. Could turn it into a supported pulse version. High Zeff is due to impurity seeding to protect the divertor. Study as a later plant DEMO Gen2? Materials • If we had to use materials available in the short term how would that constrain the design? • Is there a deliverable design, which meets our objectives, within such a constraint (e.g. 4 MWa/m2 2 MWa/m2)? • More correctly, design DEMO around the available materials not specify the materials by DEMO design. • In order to maintain availability with poorly performing materials, there is an additional drive towards a larger, lower power density, device. Advanced Plant • It is well known that the problem of high current drive in a steady-state device can be addressed by a high bootstrap fraction device. • Operating at high shape, higher βN, higher q (lower current) reduces the current drive power but does not necessarily lead to a smaller device, if the fusion power is fixed. AT power plant designs are usually smaller because of improved technology (efficiency). • Clearly a good option but relies on more development of scenarios, control and potentially higher risk. Non-Tokamak Solutions • These appear to fall into the same category as an advanced DEMO. They may have advantages in delivering technical solutions but they also have the disadvantages of longer development time, development cost and risk. • In my opinion, these should continue to be explored in an accompanying R&D programme, but not as the main design concept for DEMO. Conclusions - 1 • Development timescale and risk are additional influences on the optimum design of a DEMO plant. • The development of an integrated conceptual design of an early or low-tech DEMO Gen 1 is intended to focus research activities, allow an analysis of gaps and serve as a reference against which to measure progress. • Present thinking in the EU is that this could be a pulsed device (although this is not unanimous of course). • To achieve a reasonable fatigue life, a long pulse length is desirable and it is cheaper to do this using external current drive than a very large solenoid, if such a system can be reliable enough. OPEN ISSUE. • Work on a more advanced version of DEMO Gen 2, steadystate (possibly AT), smaller size, highlights the advantages and development needs to move beyond a low tech reference. Conclusions - 2 • DEMO Gen1 is intended to be buildable on the shortest timescale and is intended to trade-off increased capital cost against reduced development time, development cost and development risk. The early use of outputs from other programmes such as materials, ITER DT etc provides external constraints. • DEMO Gen2 relies on more development and is therefore expected to be a later option. Although more time is available for development there are greater development costs and greater risks that the developments needed, for instance on efficient current drive or precise measurement and control systems in a nuclear environment, will not be successful. • There remains value in developing and maintaining both (or more) options at least in the conceptual design phase. • SPARE SLIDES Modelling Power Plant Availability • When availability is modelled, increasing size reduces power density and increases availability. • There is potential to trade size against materials resilience to keep up the materials lifetime • (Example here with plants of 1.5 GW electrical output) Plant Availability (%) 85 80 75 70 7 8 9 Major Radius (m) 10 11 The Value and Risks of Fusion Development • If development continues globally and it is necessary to reduce reliance on fossil fuels: – 10% of future world energy market has a NPV in the region of 5 trillion $ (at present prices) – If fusion had a 10% chance of making up that market with a 10% profit, then expectation value of the development is approximately 50B$. – Economically worth doing if there is a 10% chance of making a 10% profit on 10% of the energy market. – Additional benefit of insurance against price increases or of failure of other systems to deliver. At the 0.1% level this seems easy to justify. Maintenance and Plant Availability • The maintenance scheme is already a key driver in the design of DEMO. If we want to design around low material lifetimes then this is only increased. • We need more work on the availability with different approaches, the viability of those schemes and the dependence on device size: – Is the shutdown for blanket replacement almost independent of device size? – Is a larger device easier to maintain because of access or harder because of larger weights to be handled? JET, MAST, etc. Issue multibeam ITER disruption avoidance 2 2 steady-state operation 1 2 divertor performance 1 3 burning plasma Q>10 power plant plasma performance 1 T self-sufficiency IFMIF FW/blanket materials lifetime NB/RF heating systems performance 1 R 2 3 r R R 2 3 R R 2 3 R R R R R R 3 2 3 R 3 2 3 R 3 1 3 R 3 2 3 R R R R R 1 1 3 R R R R R R R 1 1 3 1 2 3 3 1 tritium issues Key: Cook et al 2005 R R electricity generation at high availability superconducting machine 3 R 1 1 R r 1 divertor materials lifetime Power Plant R 1 FW/blanket components lifetime DEMO Phase 2 R 3 1 DEMO Phase 1 3 materials characterisation plasma-facing surface lifetime CTF 3 1 Will help to resolve the issue 2 May resolve the issue 3 Should resolve the issue R Solution is a requirement r Solution is desirable R Use Current Drive to Extend Pulse Length Noninductive current fraction 60% 70% 80% Major radius 9.6 9.6 9.6 Plasma current 18 18 18 Fusion Power 2.7 2.7 2.7 CD Power 83 116 147 Pulse length 5.5 7.2 10.7 Lifetime pulses 36,000 28,000 19,000 Double or Single Null Divertor • In many power plant studies, the tolerable divertor heat load is a substantial constraint. Double null operation with 2 divertors seems an obvious solution. • The challenge set by controlling the power balance between the 2 divertors along with the need for more complex maintenance with reduced access presents strong arguments against this. • The jury remains undecided. Measurement and Control • Many of the diagnostics that we routinely use will not survive long in a nuclear environment. • Work to improve this situation is essential. • At the same time, work to minimise the reliance on all but the most basic measurements supports the “low tech” approach to DEMO. • Can advanced tokamak operation be sustained in a nuclear environment? • Test this in existing devices by reduced set of diagnostics. – What is the minimum set of diagnostics that can sustain AT operation? – Is that set likely to be available in DEMO (or even ITER), after a few years of DT operation? Difference Between Fixed and Modelled Availability • Neglecting the effect of size on availability means smallest is best (lowest cost) Modelling availability can lead to an optimum at larger machine size. (Here very low neutron resilience <2MWa/m2) 1.2 Modelled availability Cost of electricity (normalised) • Fixed availability 1.1 1 0.9 0.8 7 8 9 Major Radius (m) 10 11