Chapter 5: Applying Newton's Laws
advertisement

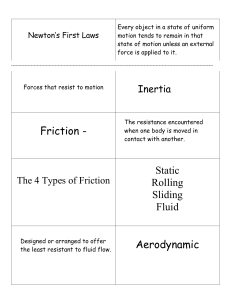
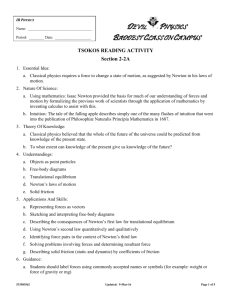
Applying Newton’s Laws Applying Newton’s Laws Applying Newton’s Laws We know three Newton’s Laws of motion, the foundation of classical mechanics. We know concepts of forces and masses. We know how to draw force diagrams (including free body diagrams). Let’s improve problem-solving skills of applying Newton’s laws to different real-life situations. Warm-Up: Newton’s Laws N1L: An object at rest will remain at rest unless it is acted upon by a net external force. An object in motion with constant velocity will continue to move with constant velocity unless it is acted upon by a net external force. F 0 N2L: If a net external force acts on the body, the body accelerates. The direction of acceleration is the same as the direction of the net force. The net force vector is equal to the mass of the body times the acceleration of the body. F ma N3L: For every action there is an equal and opposite reaction. FA on B FB on A Warm-Up: Newton’s Laws N1L and N2L apply to a specific body. Only forces acting on the body matter. To analyze person walking, include the force that the ground exerts on the person as he walks, but NOT the force that the person exerts on the ground. Free-body diagrams are essential to help identify the relevant forces. Decide to which body you are referring! It is not trivial sometimes. Action-reaction pair NEVER appear in the same free-body diagram. When a problem involves more than one body: take this problem apart and draw a separate free-body diagram for each body. N1L. Equilibrium Body is in equilibrium when it is at rest or moving with constant velocity in an inertial frame of reference. Hanging lamp Suspension bridge Airplane flying at constant speed Other examples? N1L: When a particle is at rest or is moving with constant velocity in inertial frame of reference, the vector sum of all forces acting on it must be zero: F 0 F x 0 F y 0 Particle in equilibrium, vector form Particle in equilibrium, component form N1L. Equilibrium of Particle Problem-Solving Strategy IDENTIFY the relevant concepts: You must use Newton’s first Law for any problem that involves forces acting on a body in equilibrium. Remember that “equilibrium” means that the body either remains at rest or moves with constant velocity. For example, a car is in equilibrium when it’s parked, but also when it’s driving down a straight road at a steady speed. If the problem involves more than one body, and the bodies interact with each other, you’ll also need to use Newton’s third Law. This law allows you to relate the force that one body exerts on a second body to the force that the second body exerts on the first one. Be certain that you identify the target variable(s). Common target variables in equilibrium problems include the magnitude of one of the forces, the components of a force, or the direction of a force. N1L. Equilibrium of Particle Problem-Solving Strategy, continued SET UP the problem using the following steps: 1. Draw a very simple sketch of the physical situation, showing dimensions and angles. You don’t have to be an artist! 2. For each body that is in equilibrium, draw a free-body diagram of this body. For the present, we consider the body as a particle, so a large dot will do to represent it. In your free-body diagram, do not include the other bodies that interact with it, such as a surface it may be resting on, or a rope pulling on it. 3. Now ask yourself what is interacting with the body by touching it or in any other way. On your free-body diagram, draw a force vector for each interaction. If you know the angle at which a force is directed, draw the angle accurately and label it. A surface in contact with the body exerts a normal force perpendicular to the surface and possibly a friction force parallel to the surface. Remember that a rope or chain can’t push on a body, but can only pull in a direction along its length. Be sure to include the body’s weight, except in cases where the body has negligible mass (and hence negligible weight). If the mass is given, use w=mg to find the weight. Label each force with a symbol representing the magnitude of the force. N1L. Equilibrium of Particle Problem-Solving Strategy, continued SET UP, continued: 4. Do not show in the free-body diagram any forces exerted by the body on any other body. The sums in equations include only forces that act on the body. Make sure you can answer the question “What other body causes that force?” for each force. If you can’t answer that question, you may be imagining a force that isn’t there. 5. Choose a set of coordinate axes and include them in your free-body diagram. (If there is more than one body in the problem, you’ll need to choose axes for each body separately.) Make sure you label the positive direction for each axis. This will be crucially important when you take components of the force vectors as part of your solution. Often you can simplify the problem by your choice of coordinate axes. For example, when a body rests or slides on a plane surface, it’s usually simplest to take the axes in the directions parallel and perpendicular to this surface, even when the plane is tilted. N1L. Equilibrium of Particle Problem-Solving Strategy, continued EXECUTE the solution as follows: 1. Find the components of each force along each of the body’s coordinate axes. Draw a wiggly line through each force vector that has been replaced by its components, so you don’t count it twice. Keep in mind that while the magnitude of a force is always positive, the component of a force along a particular direction may be positive or negative. 2. Set the algebraic sum of all x-components of force equal to zero. In a separate equation, set the algebraic sum of all y-components equal to zero. (Never add xand y-components in a single equation.) You can then solve these equations for up to two unknown quantities, which may be force magnitudes, components, or angles. 3. If there are two or more bodies, repeat all of the above steps for each body. If the bodies interact with each other, use Newton’s third law to relate the forces they exert on each other. 4. Make sure that you have as many independent equations as the number of unknown quantities. Then solve these equations to obtain the target variables. N1L. Equilibrium of Particle Problem-Solving Strategy, continued EVALUATE the answer: o Look at your results and ask whether they make sense. o When the result is a symbolic expression or formula, try to think of special cases (particular values or extreme cases for the various quantities) for which you can guess what the results ought to be. o Check to see that your formula works in these particular cases. N2L. Dynamics of Particles If an object is not in equilibrium then it will experience an acceleration. The relationship between the net force acting on the object and its acceleration is given by Newton's Second Law. F m a F x max F y may Problem-Solving Strategy Make a sketch of the problem showing all objects and surfaces involved. In an area away from your overall sketch, isolate EACH object in the problem by drawing a free-body force diagram for the object. This diagram should show all of the forces acting on the object. Identify each force with an appropriate UNIQUE symbol. Select a convenient coordinate system for each force diagram and indicate the coordinate axes on your diagram(s). Write each force in component representation (either using unit vectors or using column vector form). Express magnitudes as positive quantities and use + or - signs to indicate directions. Problem-Solving Strategy, continued Symbolically write the acceleration vector for each object. Be sure that the components of the acceleration that are trivially zero are written as zeros and that the accelerations of multiple objects are consistent with each other. If there is more than one object in the problem identify any possible action-reaction pairs. These forces will have equal magnitudes and opposite directions by Newton's Third Law. Apply Newton's Second Law in vector form to EACH object. Resolve the vector equations into component equations, and solve the resulting algebraic system of equations for the unknown quantities. Check the results for appropriateness, correct units, etc. Frictional Forces Frictional Forces Friction force is a contact force Very important force in everyday life Car: tires, brakes, oil in the engine Air drag: parachutes, resisting motion – bad fuel economy Everything is in place due to friction: nails, bulbs, caps… Sports: ice hockey, bicycles,… Frictional Forces Static Friction Opposes the impending motion. Takes on whatever value is necessary to keep the object at rest (up to a limit), fs < msN. When on the verge of slipping the static frictional force takes on its maximum possible value of fs, max = msN. ms, the coefficient of static friction, depends on the surfaces in contact. Kinetic Friction Opposes the motion of an object that is moving. Has a value given by fk = mkN where mk, the coefficient of kinetic friction, depends on the surfaces in contact. It is typically harder to cause an object to move than to keep it moving, mk < ms. Coefficients of Friction Frictional Forces Frictional Forces Rolling Friction It is a lot easier to move loaded chair across a horizontal floor if it has wheels Harder if it does not have wheels But how much easier? Coefficient of rolling friction mR: it is the horizontal force needed for constant speed on a flat surface divided by the upward normal force exerted by this surface. Another expression of rolling friction mR: Tractive resistance Values of rolling friction mR: 0.002 to 0.003 for steel wheels on steel rails 0.01 to 0.02 for rubber tires on concrete Why railroad trains are more fuel-efficient than highway trucks? Fluid Resistance Fluid (or gas, or liquid) exerts the force on an object moving through it Fluid resistance The moving body exerts a force on fluid to push it out of the way, fluid pushes back on the body with equal and opposite force (N3L) Magnitude of fluid resistance force usually increases with the speed of the body For low speeds, magnitude is ~ proportional to the body’s speed: K [N×s/m or kg/s] is a proportionality const; depends on the body’s shape and size, and fluid’s properties. f kv At high speeds: f Dv 2 D [N×s2/m2 or kg/m] is also proportionality const; depends on the body’s shape and size and fluid’s properties. Fluid Resistance Because of the effects of fluid resistance, any object falling in a fluid does not have a constant acceleration. DO NOT USE constant acceleration motion equations! Use N2L. Example: if you release a rock at the surface of a lake, it falls to the bottom. The fluid resistance of water is given by f=kv. What are acceleration, velocity and position of the rock as functions of time? Fluid Resistance: Example Trajectory of a baseball Initial velocity of 50 m/s Angle 35 degrees above horizon No air drug With air drug D=1.3×10-3 kg/m Air drug is important part of the baseball game! Terminal Speed As the speed increases, the resisting force also increases, until finally it is equal in magnitude to the weight. At this time m g - k vy=0, and acceleration becomes zero. Thus there is no further increase in speed. Final speed vT terminal speed is given by: mg kvT 0 mg vT k Terminal Speed The slope of the graph of y vs t becomes constant as the velocity becomes constant. Relation between speed and time during the interval before the terminal speed is reached: m dv y dt mg kvy Replacement: mg/k = vT , then integration of both sides. Remember, vy(t=0)=0: v dv y t k 0 v y vT m 0 dt k 1 exp t vT m vy ln vT v y vT v y vT (1 e k t m k t m ) Terminal Speed Note: vy becomes equal to the terminal speed only in the limit that t ∞ v y vT (1 e k t m ) a y ge k t m k t m y vT t (1 e m k High speeds: mg vT D Terminal Speed vT mg D High speeds: This expressions shows why heavy objects in air tend to fall faster than light ones. Two objects with the same physical size but different mass have the same value of D, but different m. More massive object has a larger terminal speed and falls faster. Sheet of paper falls faster if you first crumple it into a ball: smaller size makes D smaller for the same mass. Skydivers use the same principle to control their descent. Dynamics of Circular Motion Dynamics of Circular Motion From Circular motion, we know: When a particle moves along a curve, direction of its velocity vector changes. Particle must have component of acceleration to the curved path even if the speed is constant. Motion in a circle is a special case of motion along a curved path. Centripetal acceleration vector is always directed towards the center of the circle. Magnitude of acceleration: arad v 2 4 2 R R T2 2R T v Dynamics of Circular Motion Uniform circular motion, like all other motion of a particle, is governed by Newton's Second Law. There must be a some real force (such as gravity, tension, friction, etc.) or combination of forces that can provide a net force directed toward the center of the curvature of the path in order for the direction of the velocity to change. Dynamics of Circular Motion This net centripetal (or radial) force must equal the mass of the object times the centripetal (or radial) acceleration by Newton's Second Law. The magnitude of radial acceleration is given by arad=v2/R, so magnitude of the net inward radial force on a particle with mass m must be: 2 2 v 4 R F Fnet marad m R m T 2 Uniform circular motion can result from any combination of forces, just so the net force is always directed towards the center of the circle and has a constant magnitude. Dynamics of Circular Motion Never add a "centripetal force" or "centrifugal force" to your free-body force diagram when you have a particle undergoing circular motion. The so-called centripetal force is the NET FORCE in the RADIAL DIRECTION. It must be caused by something real. Particle accelerates, so there is no equilibrium! Dynamics of Circular Motion