PPT-CH5
advertisement

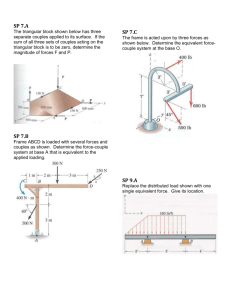
Chapter 5 Analysis and Design of
Beams for Bending
5.1 Introduction
-- Dealing with beams of different materials:
steel, aluminum, wood, etc.
-- Loading: transverse loads
Concentrated loads
Distributed loads
-- Supports
Simply supported
Cantilever Beam
Overhanging
Continuous
Fixed Beam
A. Statically Determinate Beams
-- Problems can be solved using Equations of Equilibrium
B. Statically Indeterminate Beams
-- Problems cannot be solved using Eq. of Equilibrium
-- Must rely on additional deformation equations to solve
the problems.
FBDs are sometimes necessary:
FBDs are necessary tools to determine the internal
(1) shear force V – create internal shear stress; and
(2) Bending moment M – create normal stress
From Ch 4:
Mc
m
I
Where
My
x
I
I = moment of inertia
y = distance from the N. Surface
c = max distance
(5.1)
(5.2)
Recalling, elastic section modulus, S = I/c,
M
m
S
hence
(5.3)
For a rectangular cross-section beam,
1
S bh 2
6
From Eq. (5.3),
(5.4)
max occurs at Mmax
It is necessary to plot the V and M diagrams along the length
of a beam.
to know where Vmax or Mmax occurs!
5.2 Shear and Bending-Moment Diagrams
•Determining of V and M at selected
points of the beam
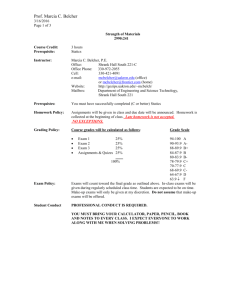
Sign Conventions
1.
The shear is positive (+) when external
forces acting on the beam tend to shear
off the beam at the point indicated in fig
5.7b
2. The bending moment is positive (+)
when the external forces acting on the
beam tend to bend the beam at the
point indicated in fig 5.7c
Moment
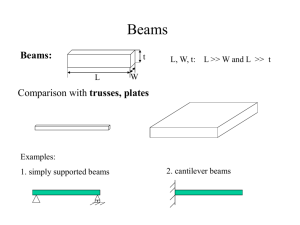
5.3 Relations among Load, Shear
and Bending Moment
1. Relations between Load and Shear
FY 0 :
V-(V+V ) wx 0
V wx
Hence,
dV
w
dx
(5.5)
Integrating Eq. (5.5) between points C and D
xD
VD VC wdx
xC
(5.6)
VD – VC = area under load curve between C and D
1
(5.6’)
(5.5’)
2. Relations between Shear and Bending Moment
M C ' 0 :
x
( M M ) M V x w x
0
2
1
M V x w ( x ) 2
2
M dM
x 0 x
dx
lim
or
M
1
V x
x
2
dM
V
dx
(5.7)
dM
V
dx
(5.7)
xD
M D M C Vdx
xC
MD – MC = area under shear curve between points C and D
5.4 Design of Prismatic Beams for Bending
-- Design of a beam is controlled by |Mmax|
M max c
m
I
M max
m
S
(5.1’,5.3’)
Hence, the min allowable value of section modulus is:
Smin
M max
all
(5.9)
Question: Where to cut? What are the rules?
Answer: whenever there is a discontinuity in the loading
conditions, there must be a cut.
Reminder:
The equations obtained through each cut are only valid
to that particular section, not to the entire beam.
5.5 Using Singularity Functions to Determine
Shear and Bending Moment in a Beam
Beam Constitutive Equations
w d4y
4
EI dx
V
d3y
3
EI dx
M d2y
2
EI dx
dy
dx
y f ( x)
Notes:
1. In this set of equations, +y is going upward
and +x is going to the right.
2. Everything going downward is “_”, and upward
is +. There is no exception.
3. There no necessity of changing sign for an y
integration or derivation.
Sign Conventions:
1. Force going in the +y direction is “+”
2. Moment CW is “+”
Rules for Singularity Functions
Rule #1:
xa
0
xa
n
1 when x a
{
0 when x a
( x a) n when x a
{
0
when x a
(5.15)
(5.14)
Rule #2:
1. Distributed load w(x) is zero order: e.g. wo<x-a>o
2.
Pointed load P(x) is (-1) order: e.g. P<x-a>-1
3.
Moment M is (-2) order: e.g. Mo<x-a>-2
Rule #3:
x a dx x a
x a dx x a
1
x a dx 2 x a
1
x a dx 3 x a
x a 2dx x a 1
1
0
0
1
1
2
2
3
1
x a dx x a 4
4
3
Rule #4:
1. Set up w = w(x) first, by including all forces, from the left
to the right of the beam.
2. Integrating w once to obtain V, w/o adding any constants.
3. Integrating V to obtain M, w/o adding any constants.
4. Integrating M to obtain EI , adding an integration
constant C1.
5. Integrating EI to obtain EIy, adding another constant
C2.
6. Using two boundary conditions to solve for C1 and C2.
1
V ( x) w0 a w0 x a
4
1
1
M ( x) w0 ax w0 x a
4
2
(5.11)
2
(5.12)
x
1
M ( x) M (0) V ( x)dx w0adx w0 x a dx
0
0 4
0
•After integration, and observing that M (0) 0 We obtain as before
x
x
1
1
M ( x) w0 ax w0 x a
4
2
w( x) w0 x a
2
0
w( x) 0 for x< 0
(5.13)
x a ( x a )0 1
0
w( x) w0 for x a
1
V w0 a for x 0
4
x
x
0
0
0
V ( x) V (0) w( x)dx w0 x a dx
1
V ( x) w0 a w0 x a
4
1
V ( x) w0 a w0 x a
4
1
1
x a dx
xa
n 1
n
d
xa
dx
and
n
n xa
n 1
n 1
for n 0 (5.16)
for n 1 (5.17)
Example 5.05
Sample Problem 5.9
5.6 Nonprismatic Beams
S
M
all
1
1
V ( x) P P x L
2
2
1
1
M ( x) Px P x L
2
2
0
1
0
w( x) w0 x a w0 x b
0
•Load and Resistance Factor Design
•
D M D L M L MU
Example 5.03