LLRF Requirement and parameters at ESS
advertisement

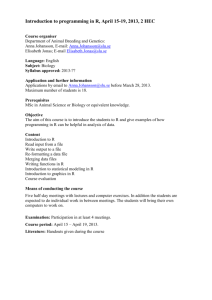
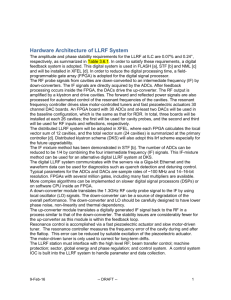
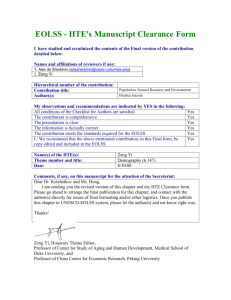
LLRF Requirement and Parameters at ESS Rihua Zeng, Anders J Johansson LLRF workshop, Hamburg, 2011-1020 1 Picture from C. Carlile’s presentation at IPAC 2011 2 Neutrons in 2019 ! 5 MW 2.5 GeV 2.9 ms 14 Hz 50 mA 352.2 MHz 704.4 MHz < 1 W/m beam power protons (H+) pulses rep rate pulse current RF frequency beam losses No accumulator/compressor ring ! 3 Picture from G. Trahern’s presentation at ICALEPCS11 Green field site Picture from G. Trahern’s presentation at ICALEPCS11 4 352.21MHz Source LEBT RFQ 75keV RF Source MEBT DTL 3MeV 1 704.42MHz Spokes 50MeV 5 Low β 108MeV 28 High β 606MeV 64 spoke and elliptical cavities . (One klystron for one cavity.) Many issues to be addressed Stringent demands from ESS leads to tough challenges 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson Target 2500MeV 120 More than 200 LLRF stations to be built by 2019 for RFQ, DTL, HEBT 5 Pulse length: 2.86 ms Rep rate: 14 Hz Current: 50mA An universal recipe for LLRF? L 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 6 L R F : To do list Frequency Generation Phase Reference Distribution Frequency Conversion 1. Generation of required frequencies (RF, LO, IF, Clks) 2. Low phase noise 1. Phase stable and low temperature coefficient cable or fiber 2. Phase drift control 3. Distribution of the frequencies at each LLRF station 1. Down/up conversion 1. Selection of the IF and sampling rate 3. High isolation between channels 4. Low noise and phase drift control Diagnostics Cavity Field Control 1. Parameters calculation and monitoring (Q value, cavity detuning etc.) 2. Signals monitoring (power, vacuum, temperature etc.) 3. Faults fast detection, locating and analysis 4. Timing, logic, algorithm communication checking 5. Cavity simulator 6. Interlock 1. Amplitude and phase setting 2. IQ detection 3. Feedback 4. Feed forward 5. Beam loading compensation 5. Klystron linearization 6. Fault avoidance, detection, recovery and tolerance 8. Beam based feedback Cavity Resonance Control 1. Pre-detuning to compensate synchronous phase operation 2. Normal conducting cavity frequency control 3. Dynamic Lorentz force compensation 4. Microphonics control Control System Sever 1. High degree of automation to enable easy operation, fast fault detection and recovery 2. Fast communication and high-speed data exchange 3. Powerful database to support fast detection and recovery and adaptive control 4. Interface to control system 5. Remote access/control RF Control Hardware Host CPU 1. Selection of FPGA/DSP, FLASH/SDRAM, fast and high resolution ADC, DAC 2. Boards with which interface to communication (VME, VXI, ATCA, PCI or Ethernet…?) 3. Hardware debug points 4. Hardware concerns: SNR (ADC nonlinearity, DC/DC convert noise, clock jitter, crosstalk) and temperature independency 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson General purpose CPU or system on chip to implement the control server 7 To learn list FLASH SNS JPARC RF Stab 0.01% 0.5% 1% IF freq. 250KHz 54 MHz 50 MHz 12 MHz 13 MHz 20 MHz 56 MHz 10 MHz Sample 1 MHZ Freq. 81 MHz 40 MHz 48 MHz 54 MHz 80 MHz 77.7 56 MHz MHz 40 MHz Sampl. IQ Other IQ Other IQ Other IQ Crate VME/ATC VXI A cPCI VXI VME USB Phase Distr.. Coax Opto Opto Opto 2011-10-20 Coax Ferm. LLRF Workshop 2011, R. Zeng, A. J. Johansson CERN LBNL 8 MYHHRA PXI … To be listed list 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 9 Issues: multiple cavities control 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 10 Picture from S. Peggs’s presentation at IPAC 2011 11 Issues: high effeciency Predistorter Input I,Q Klystron Linearization Compl Complex Multiplier ex Multipli Del Delay ay DAC Up Up Converter Conve rter Pre-amp Delay Linearize Adapti Table on Addressin Addressing g Del Delay ay Adaption Adaptio Algorithm n ADC Down Up Converter Conve rter Minimize power overhead. Is 20% enough? 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 12 Klystron Output RF Issues: high availability • Availability at ESS 95% Avoid failures that cause the whole system to fail Redundancy Automatically detect Fast recovery 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 13 Issues: others 2011-10-20 High intensity Long pulse High gradient Spoke cavity LLRF Workshop 2011, R. Zeng, A. J. Johansson 14 Design guidelines • Fault tolerant architecture and design – Redundancy or adaption? • Easy maintenance – Generic design for all LLRF stations? – Modular design? – Auto-config and auto-calibration? • Cost effective and long lived – Multiple vendors? – Software defined function by FPGA/DSP implementation for future upgrades? 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 15 Main architecture of ESS LLRF • FPGA based solution • Separate analog mixers for down- and up-conversion • I/Q-demodulation and modulation • One master oscillator for the whole ESS – Phase reference for RF – Time reference for control, science • Global phase reference distribution • Coaxial phase reference line • EPICS control system 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 16 Interesting possibilities: • Co-design with Beam Instrumentation – Simplify upkeep of installation – Minimize cost of units for installation and inventory • Open Hardware solution – Multiple sources of hardware possible 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 17 What to do in the near future • Simulation for more detailed parameters and requirement 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 18 • Build the prototype 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 19 • More important, To ask more suggestions for the possible solutions at ESS Many thanks for your attention! 2011-10-20 LLRF Workshop 2011, R. Zeng, A. J. Johansson 20