hardware_software
advertisement

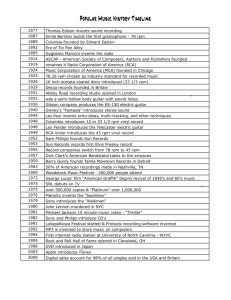
AA241x H A RDWA RE AND S OFTWA RE O V E RV I E W Spring 2015 Adrien Perkins Pixhawk 168 MHz Cortex M4F CPU 2 MB Flash 4 GB SD card – many many hours of logging Wireless Telemetry (3DR Radio) 915 MHz, 100 mW Unique “NetID” for each set Mavlink Protocol DF13 6-Pin USB Micro USB GPS + Magnetometer GPS Radio › Needs clear sky view › 5 Hz update rate Magnetometer › Provides heading estimate › Keep away from high power electronics (speed controller) › NOTE THE ARROW!! › If you reposition it, always good to recalibrate it DF13 6pin GPS DF13 4pin MAG Airspeed Sensor Measures difference between static and total pressure to determine airspeed Wind will affect speed reading Silcone Tubing DF13 4pin Power Module Record current and voltage from battery Powers pixhawk, radios, receiver Does not power servos! DF13 6-Pin Safety Switch and Buzzer Safety Switch › Physical “hardware” arming switch › To arm: press and hold for 3 seconds (should go from slow flash to fast flash) › Allows for “software” arming to occur • Down and to the right on left stick of transmitter › Only after arming will power go to servos Buzzer › Provides auditory feedback (arming error alerts, low battery warning, etc) › Learn to speak Pixhawk beep (PX4 dialect) Servo Wires Be very careful on direction!!! Order of connection: › 1 – Aileron › 2 – Elevator › 3 – Rudder › 4 – Throttle Look for indications like this Lithium Polymer Batteries (LiPo) 3.7V per cell nominally Metrics › N-cells: 2S means 2 cells (7.4V) › Capacity: 1100mAh › Discharge rate: 25C (27.5A) › Charge rate: 1C (1.1A) Can catch fire or leak if not properly charged › Never leave a charger unattended Batteries will brick if you drain too low! What is too low? › Unloaded: 3.7V minimum › Loaded: 3.3V minimum Old Slides Speed Controller Rated by Max Current and Max Voltage Direct Current Power in, Three-phase Alternating Current out “Opto” vs “BEC” › BEC can power RC gear, Opto can’t 11 Brushless Outrunner Motor “Outrunner” - magnets rotate around stator Rated by kV = no load rpm/V › High kV = fast rpm, low torque › Low kV = low rpm, high torque Too much power melts windings, burns out motor 12 Power Electronics Setup DC Power DC Power 3 Phase AC 13 Carbon Folding Props More rigid, more efficient, more expensive (vs plastic props) More dangerous – they are spinning knives Spinner cap lets them fold on landing, or if motor braking is on (more efficient glide) 14 Servos Drive Motor + Rotation Sensor + PID Control board … in 8-grams Forcing the control arms by hand wrecks gears www.twf8.ws 15