p(x)
advertisement
")
Data Compression: Advanced Topics
Huffman Coding Algorithm
Motivation
Procedure
Examples
Unitary Transforms
Definition
Properties
Applications
EE465: Introduction to Digital Image Processing
1
Recall: Variable Length Codes (VLC)
Recall:
Self-information
I ( p) log 2 p
It follows from the above formula that a small-probability event contains
much information and therefore worth many bits to represent it. Conversely,
if some event frequently occurs, it is probably a good idea to use as few bits
as possible to represent it. Such observation leads to the idea of varying the
code lengths based on the events’ probabilities.
Assign a long codeword to an event with small probability
Assign a short codeword to an event with large probability
EE465: Introduction to Digital Image Processing
2
Two Goals of VLC design
• achieve optimal code length (i.e., minimal redundancy)
For an event x with probability of p(x), the optimal
code-length is –log2p(x) , where x denotes the
smallest integer larger than x (e.g., 3.4=4 )
code redundancy: r l H ( X ) 0
Unless probabilities of events are all power of 2,
we often have r>0
• satisfy uniquely decodable (prefix) condition
EE465: Introduction to Digital Image Processing
3
“Big Question”
How can we simultaneously achieve minimum redundancy
and uniquely decodable conditions?
D. Huffman was the first one to think about this problem
and come up with a systematic solution.
EE465: Introduction to Digital Image Processing
4
Huffman Coding (Huffman’1952)
Coding Procedures for an N-symbol source
Source reduction
List all probabilities in a descending order
Merge the two symbols with smallest probabilities into
a new compound symbol
Repeat the above two steps for N-2 steps
Codeword assignment
Start from the smallest source and work back to the
original source
Each merging point corresponds to a node in binary
codeword tree
EE465: Introduction to Digital Image Processing
5
Example-I
Step 1: Source reduction
symbol x
S
N
E
W
p(x)
0.5
0.25
0.125
0.125
0.5
0.25
0.25
(EW)
0.5
0.5
(NEW)
compound symbols
EE465: Introduction to Digital Image Processing
6
Example-I (Con’t)
Step 2: Codeword assignment
symbol x p(x)
NEW
0.5
0.5
0.5
S
0
N
1
0
S
0.25
0.25 0
0.5
EW
10
0
E
0.125
N
1
0
0.25 1
W
0.125 1
111 110
W
E
1
0
EE465: Introduction to Digital Image Processing
codeword
0
0
1
10
110
111
7
Example-I (Con’t)
1
0
NEW
0
1
0
S
EW
10
N
1
0
110
W
E
0
1
NEW
1
0
1
S
or
EW
01
N
1
0
000
001
W
E
The codeword assignment is not unique. In fact, at each
merging point (node), we can arbitrarily assign “0” and “1”
to the two branches (average code length is the same).
EE465: Introduction to Digital Image Processing
8
Example-II
Step 1: Source reduction
symbol x
e
a
i
o
u
p(x)
0.4 0.4
0.2
0.2
0.1
0.1
0.2
0.2
0.2
(ou)
0.4
0.6
(aiou)
0.4
(iou)
0.2
0.4
compound symbols
EE465: Introduction to Digital Image Processing
9
Example-II (Con’t)
Step 2: Codeword assignment
symbol x
e
a
i
o
u
p(x)
0.4 0.4
0.2
0.2
0.1
0.1
0.2
0.2
0.4
0.4
(iou)
0.2
0.6 0
(aiou)
0.4 1
0.2
(ou)
codeword
1
01
000
0010
0011
compound symbols
EE465: Introduction to Digital Image Processing
10
Example-II (Con’t)
0
1
(aiou)
e
00
01
(iou) a
000
001
(ou)
i
0010 0011
o u
binary codeword tree representation
EE465: Introduction to Digital Image Processing
11
Example-II (Con’t)
symbol x
e
a
i
o
u
5
p(x)
0.4
0.2
0.2
0.1
0.1
codeword length
1
1
01
2
3
000
0010
4
0011
4
l pi li 0.4 1 0.2 2 0.2 3 0.1 4 0.1 4 2.2bps
i 1
5
H ( X ) pi log 2 pi 2.122bps
r l H ( X ) 0.078bps
i 1
If we use fixed-length codes, we have to spend three bits per
sample, which gives code redundancy of 3-2.122=0.878bps
EE465: Introduction to Digital Image Processing
12
Example-III
Step 1: Source reduction
compound symbol
EE465: Introduction to Digital Image Processing
13
Example-III (Con’t)
Step 2: Codeword assignment
compound symbol
EE465: Introduction to Digital Image Processing
14
Summary of Huffman Coding Algorithm
Achieve minimal redundancy subject to the constraint
that the source symbols be coded one at a time
Sorting symbols in descending probabilities is the key
in the step of source reduction
The codeword assignment is not unique. Exchange the
labeling of “0” and “1” at any node of binary codeword
tree would produce another solution that equally works
well
Only works for a source with finite number of symbols
(otherwise, it does not know where to start)
EE465: Introduction to Digital Image Processing
15
Data Compression: Advanced Topics
Huffman Coding Algorithm
Motivation
Procedure
Examples
Unitary Transforms
Definition
Properties
Applications
EE465: Introduction to Digital Image Processing
16
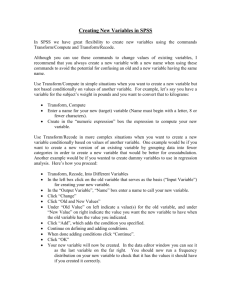
An Example of 1D Transform
with Two Variables
x2
y2
y1
(1,1)
(1.414,0)
x1
y1 1 1 1 x1
1 1 1
y
1 1 x y Ax , A
1 1
2
2
2
2
Transform matrix
EE465: Introduction to Digital Image Processing
17
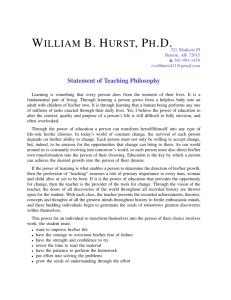
Decorrelating Property of Transform
x2
y1
y2
x1
x1 and x2 are highly correlated
p(x1x2) p(x1)p(x2)
y1 and y2 are less correlated
p(y1y2) p(y1)p(y2)
Please use MATLAB demo program to help your understanding why
it is desirable to have less correlation for image compression
EE465: Introduction to Digital Image Processing
18
Transform=Change of Coordinates
Intuitively speaking, transform plays the role of
facilitating the source modeling
Due to the decorrelating property of transform, it is
easier to model transform coefficients (Y) instead of
pixel values (X)
An appropriate choice of transform (transform
matrix A) depends on the source statistics P(X)
We will only consider the class of transforms
corresponding to unitary matrices
EE465: Introduction to Digital Image Processing
19
Unitary Matrix
Definition
conjugate
transpose
A matrix A is called unitary if A-1=A*T
Example
1
A
2
1 1 1
1 1 1
T
,
A
A
1 1
1 1
2
Notes:
transpose and conjugate can exchange, i.e., A*T=AT*
For a real matrix A, it is unitary if A-1=AT
EE465: Introduction to Digital Image Processing
20
Example 1: Discrete Fourier Transform (DFT)
DFT Matrix:
A N N
a11
...
...
a N 1
... ... a1N
... ... ...
F
... ... ...
... ... a NN
1
akl
WNkl ,
N
WN e
j
2
N
,WNN 1
N
yk akl xl
Im
l 1
Re
DFT:
1
yk
N
N
xW
l 1
l
kl
N
EE465: Introduction to Digital Image Processing
WN
21
Discrete Fourier Transform (Con’t)
Properties of DFT matrix
akl alk
symmetry
Proof:
F FT
unitary F 1 FT * F*
Proof: If we denote P F FT * then we have
j 2 ( k l ) n
j 2 ( k l ) n
N
N
1
e
1 k l
1
1
*
N
pkl akn anl e
j 2 ( k l ) n / N
N n1
N 1 e
n 1
0 k l
1 j 2kl / N N 1 n 1 r N 1
akl
e
r
, (r 1)
1 r
N
n 0
P F FT * I
(identity matrix)
EE465: Introduction to Digital Image Processing
22
Example 2: Discrete Cosine Transform (DCT)
A N N
a11
...
...
a N 1
... ... a1N
... ... ...
C
... ... ...
... ... a NN
1
, k 1,1 l N
N
akl
(2l 1)( k 1)
2
cos
,2 k N ,1 l N
N
2N
C C* , C1 CT
real
You can check it using MATLAB demo
EE465: Introduction to Digital Image Processing
23
DCT Examples
1
C
2
N=2:
N=4:
C
1 1
1 1 Haar Transform
0.5000 0.5000 0.5000 0.5000
0.6533 0.2706 -0.2706 -0.6533
0.5000 -0.5000 -0.5000 0.5000
0.2706 -0.6533 0.6533 -0.2706
Here is a piece of MATLAB code to generate DCT matrix by yourself
% generate DCT matrix with size of N-by-N
Function C=DCT_matrix(N)
for i=1:N;
x=zeros(N,1);x(i)=1;y=dct(x);C(:,i)=y;end;
end
EE465: Introduction to Digital Image Processing
24
Example 3: Hadamard Transform
1 1 1
1 A n
A1
A
1 1, A 2 n
2
2
n
An
H
An
H H* H 1 HT
Here is a piece of MATLAB code to generate Hadamard matrix by yourself
% generate Hadamard matrix N=2^{n}
function H=hadamard(n)
H=[1 1;1 -1]/sqrt(2);
i=1;
while i<n
H=[H H;H -H]/sqrt(2);
i=i+1;
end
EE465: Introduction to Digital Image Processing
25
1D Unitary Transform
When the transform matrix A is unitary, the defined
1D transform y Ax is called unitary transform
Forward Transform
y Ax
y1 a11 a1N x1
y
x
2
2
y
a
a
NN x N
N N1
N
yk akl xl
j 1
Inverse Transform
1
*T
xA yA y
x1 a11* a*N 1 y1
x
y2
2
*
*
x
y
a
a
N 1N N
NN
N
xk alk* yl
l 1
EE465: Introduction to Digital Image Processing
26
Basis Vectors
y1 a11 a1N x1
y
x
2
2
y
a
a
NN x N
N N1
N for for
y xk bk , bk [ak1 ,..., akN ]T
k 1
basis vectors corresponding to forward transform
(column vectors of transform matrix A)
x1 a11* a*N 1 y1
inv inv
N
x
*
* T
y
x
y
b
,
b
[
a
,...,
a
]
2
2
k k
k
1k
Nk
k 1
*
*
x
y
N a1N aNN N basis vectors corresponding to inverse transform
(column vectors of transform matrix A*T )
EE465: Introduction to Digital Image Processing
27
From 1D to 2D
Do N 1D transforms in parallel
YN N A N N X N N
y11 y1N a11 a1N x11 x1N
y N 1 y NN aN 1 aNN xN 1 xNN
y1 | ... | yi | ... | yN
yi Axi , i 1 N
x1 | ... | xi | ... | xN
T
xi [ xi1 ,..., xiN ] , yi [ yi1 ,..., yiN ]T
EE465: Introduction to Digital Image Processing
28
Definition of 2D Transform
T
Y
A
X
A
2D forward transform
N N
N N
N N
N N
y11 y1N a11 a1N x11 x1N a11 aN 1
y N 1 y NN aN 1 aNN xN 1 xNN a1N aNN
1D column transform
EE465: Introduction to Digital Image Processing
1D row transform
29
2D Transform=Two Sequential
1D Transforms
T
Y AXA
column transform
row transform
row transform
column transform
Y1 AX
(left matrix multiplication first)
Y Y1AT (AY1T )T
Y2 XAT ( AXT )T(right matrix multiplication first)
Y AY2
Conclusion:
2D separable transform can be decomposed into two sequential
The ordering of 1D transforms does not matter
EE465: Introduction to Digital Image Processing
30
Basis Images
X
T
X δ ij [ kl ]
Y AXA T
T
Y AXA T Bij
T
Bij bi b j , bi [ai1 ,..., aiN ]T
1 k i, l j
kl
0 otherwise
N1
8
8
X xijδij
1N
8
T
i 1 j 1
8
Y xij Bij
i 1 j 1
Basis image Bij can be viewed as the response of the linear system
(2D transform) to a delta-function input ij
EE465: Introduction to Digital Image Processing
31
Example 1: 8-by-8 Hadamard Transform
1
1
1
1 1
A
8 1
1
1
1
b1
1 1 1 1
1 1 1 1
1 1 1 1
1 1 1 1 1 1 1
,
1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1
1 1 1
1 1 1
b8
j
DC
i
Bij
In MATLAB demo, you can generate these 64 basis images and display them
EE465: Introduction to Digital Image Processing
32
Example 2: 8-by-8 DCT
A88
a11
...
...
a81
j
... ... a18
... ... ...
... ... ...
... ... a88
DC
1 , k 1,1 l 8
8
akl 1
(2l 1)( k 1)
cos
,2 k 8,1 l 8
16
2
i
In MATLAB demo, you can generate these 64 basis images and display them
EE465: Introduction to Digital Image Processing
33
2D Unitary Transform
Suppose A is a unitary matrix,
forward transform
YN N A N N X N N ATN N
inverse transform X N N A *NT N YN N A*N N
Proof
1
*T
A
A
Since A is a unitary matrix, we have
A*T YA * A*T (AXA T ) A* ( A*T A) X( AT A* )
( A*T A) X( AT* A)T I X I T X
( AB )T BT AT
EE465: Introduction to Digital Image Processing
34
Properties of Unitary Transforms
Energy compaction: only a small fraction of
transform coefficients have large magnitude
Such property is related to the decorrelating
capability of unitary transforms
Energy conservation: unitary transform
preserves the 2-norm of input vectors
Such property essentially comes from the fact that
rotating coordinates does not affect Euclidean
distance
EE465: Introduction to Digital Image Processing
35
Energy Compaction Property
How does unitary transform compact the energy?
Assumption: signal is correlated; no energy compaction can be
done for white noise even with unitary transform
Advanced mathematical analysis can show that DCT basis is an
approximation of eigenvectors of AR(1) process (a good model
for correlated signals such as an image)
A frequency-domain interpretation
Most transform coefficients would be small except those around
DC and those corresponding to edges (spatially high-frequency
components)
Images are mixture of smooth regions and edges
EE465: Introduction to Digital Image Processing
36
Energy Compaction Example in 1D
Hadamard matrix
1 1 1 1
100
1 1 1 1
98
1
A
,x
98
2 1 1 1 1
1
1
1
1
100
significant
1 1 1 1 100 198
1 1 1 1 1 98 0
y Ax
2 1 1 1 1 98 0
1
1
1
1
100 2
A coefficient is called significant if its magnitude insignificant coefficients (th=64)
is above a pre-selected threshold th
EE465: Introduction to Digital Image Processing
37
Energy Compaction Example in 2D
Example
1 1 1 1
1 1 1 1 1
A
2 1 1 1 1
1
1
1
1
0
5.5
1
100 100 98 99
391.5
T
100 100 94 94 Y AXA
2.5
2
4
.
5
2
X
Y
98 97 96 100
1
0.5
2
0.5
100
99
97
94
2
1
.
5
0
1
.
5
A coefficient is called significant if its magnitude
is above a pre-selected threshold th
insignificant coefficients (th=64)
EE465: Introduction to Digital Image Processing
38
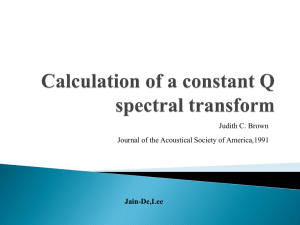
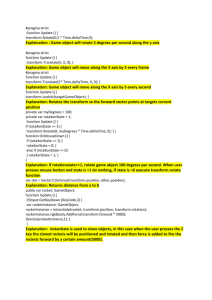
Image Example
low-frequency
Original cameraman image X
high-frequency
Its DCT coefficients Y
(2451 significant coefficients, th=64)
Notice the excellent energy compaction property of DCT
EE465: Introduction to Digital Image Processing
39
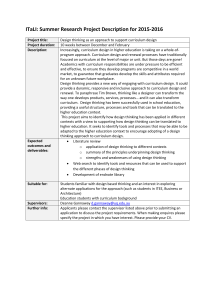
Counter Example
Original noise image X
Its DCT coefficients Y
No energy compaction can be achieved for white noise
EE465: Introduction to Digital Image Processing
40
Energy Conservation Property in 1D
1D case
y Ax
Proof
A is unitary
2 2
|| y || || x ||
2
*T
2 *T
|| y || | yi | y y ( Ax ) ( Ax )
N
i 1
*T *T *T N
2
2
x ( A A) x x x | xi | || x ||
i 1
EE465: Introduction to Digital Image Processing
41
Numerical Example
1
A
2
1 1 3
1 1, x 4
1 1 1 3 1 7
y Ax
1 1 4
1
2
2
Check:
2
2
2 2
7
1
|| x || 3 42 25, || y ||2
25
2
EE465: Introduction to Digital Image Processing
42
Implication of Energy Conservation
T
y [ y1 ,..., y N ]
Q
ˆ
y [ yˆ1 ,..., yˆ N ]T
T-1
T
x [ x1 ,..., x N ]T
y Ax
ˆ
x [ xˆ1 ,..., xˆ N ]T
Linearity of Transform
ˆ
ˆ
y y A( x x )
ˆ
ˆ
y Ax
A is unitary
ˆ 2 ˆ 2
|| y y || || x x ||
EE465: Introduction to Digital Image Processing
43
Energy Conservation Property in 2D
2-norm of a matrix X
2
X | xij | || xi ||
N
2
N
N
2
i 1 j 1
Step 1:
Proof:
Y AX
Y AX
A unitary
i 1
Y X
2
2
yi Axi , i 1 N
Using energy conservation property in 1D, we have
2 2
|| yi || || xi || , i 1 N
2 N
2
||
y
||
||
x
||
i i
N
i 1
i 1
Y X
2
2
EE465: Introduction to Digital Image Processing
44
Energy Conservation Property in 2D (Con’t)
Step 2:
Y AXA
T
Y X
2
A unitary
2
Hint:
2D transform can be decomposed into two sequential 1D transforms, e.g.,
column transform
row transform
Y1 AX
Y Y1A (AY1 )
T
T T
Use the result you obtained in step 1 and note that
EE465: Introduction to Digital Image Processing
X
T 2
X
2
45
Numerical Example
1 / 2
A
1 / 2
1 2
X
3
4
T
1/ 2
1/ 2
5 1
Y AXA
2
0
T
Check:
X 12 2 2 32 4 2 30
2
|| Y ||2 52 22 12 02 30
EE465: Introduction to Digital Image Processing
46
Implication of Energy Conservation
X
T
Y
Q
T-1
Ŷ
Y AXA T
X̂
ˆ A*T Y
ˆ A*
X
Linearity of Transform
ˆ A(X X
ˆ )AT
YY
ˆ ||2 || X X
ˆ ||2
|| Y Y
Similar to 1D case, quantization noise in the transform domain
has the same energy as that in the spatial domain
EE465: Introduction to Digital Image Processing
47
Why Energy Conservation?
image X
forward Y
Transform
ˆ || || X X
ˆ ||
|| Y Y
2
^
image X
inverse
Transform
s
f
entropy
coding
probability
estimation
2
^
Y
f-1
s
binary
bit stream
super
channel
entropy
decoding
EE465: Introduction to Digital Image Processing
48