Structural Dynamics- Modal Analysis
advertisement

Wind loading and structural response - Lecture 11
Dr. J.D. Holmes
Basic structural dynamics II
Basic structural dynamics II
• Topics :
• multi-degree-of freedom structures - free vibration
• multi-degree-of freedom structures - forced vibration
• response of a tower to vortex shedding forces
Basic structural dynamics I
• Multi-degree of freedom structures - :
• Consider a structure consisting of many masses connected
together by elements of known stiffnesses
mn
m3
xn
x3
m2
x2
m1
x1
The masses can move independently with displacements x1, x2 etc.
Basic structural dynamics I
• Multi-degree of freedom structures – free vibration :
• Each mass has an equation of motion
For free vibration:
mass m1:
m1 x 1 k 11 x 1 k 12 x 2 k 13 x 3 .......k 1n x n 0
mass m2:
m 2 x 2 k 21 x 1 k 22 x 2 k 23 x 3 .......k
2n x n
0
…………………….
mass mn:
m n x n k n1x1 k n2 x 2 k n3 x 3 .......knn x n 0
Note coupling terms (e.g. terms in x2, x3 etc. in first equation)
stiffness terms k12, k13 etc. are not necessarily equal to zero
Basic structural dynamics I
• Multi-degree of freedom structures – free vibration :
In matrix form :
mx kx 0
Assuming harmonic motion : {x }= {X}sin(t+)
ω 2 m X k X
k1mX (1/ω2 )X
This is an eigenvalue problem for the matrix [k]-1[m]
Basic structural dynamics I
• Multi-degree of freedom structures – free vibration :
There are n eigenvalues, j and n sets of eigenvectors {j}
for j=1, 2, 3 ……n
Then, for each j :
k1 m j λ j j (1/ω j 2 ) j
j is the circular frequency (2nj); {j} is the mode shape for mode j.
They satisfy the equation :
ω 2j m j k j
The mode shape can be scaled arbitrarily - multiplying both sides of the
equation by a constant will not affect the equality
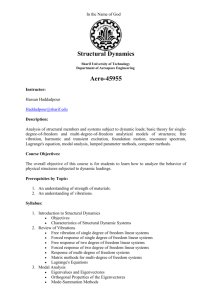
Basic structural dynamics I
• Mode shapes - :
mn
mn
m3
m3
m3
m2
m2
m1
m1
Mode 1
mn
Mode 2
m2
m1
Mode 3
Number of modes, frequencies = number of masses = degrees of freedom
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• For forced vibration, external forces pi(t) are applied
to each mass i:
Pn
mn
xn
m3
x3
P3
P2
m2
x2
P1
m1
x1
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• For forced vibration, external forces pi(t) are applied
to each mass i:
m1 x 1 k 11 x 1 k 12 x 2 k 13 x 3 .......k 1n x n p1 (t)
m 2 x 2 k 21 x 1 k 22 x 2 k 23 x 3 .......k
2n x n
p 2 (t)
…………………….
m n x n k n1x1 k n2 x 2 k n3 x 3 .......knn x n p n (t)
• These are coupled differential equations of motion
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• For forced vibration, external forces pi(t) are applied
to each mass i:
m1 x 1 k 11 x 1 k 12 x 2 k 13 x 3 .......k 1n x n p1 (t)
m 2 x 2 k 21 x 1 k 22 x 2 k 23 x 3 .......k
2n x n
p 2 (t)
…………………….
m n x n k n1x1 k n2 x 2 k n3 x 3 .......knn x n p n (t)
• These are coupled differential equations
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• For forced vibration, external forces pi(t) are applied
to each mass i:
m1 x 1 k 11 x 1 k 12 x 2 k 13 x 3 .......k 1n x n p1 (t)
m 2 x 2 k 21 x 1 k 22 x 2 k 23 x 3 .......k
2n x n
p 2 (t)
…………………….
m n x n k n1x1 k n2 x 2 k n3 x 3 .......knn x n p n (t)
• These are coupled differential equations
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• In matrix form :
mx kx p(t)
Mass matrix [m] is diagonal
Stiffness matrix [k] is symmetric
{p(t)} is a vector of external forces –
each element is a function of time
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
• Modal analysis is a convenient method of solution of
the forced vibration problem when the elements of
the stiffness matrix are constant – i.e.the structure is
linear
The coupled equations of motion are transformed
into a set of uncoupled equations
Each uncoupled equation is analogous to the equation
of motion for a single d-o-f system, and can be solved
in the same way
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Assume that the response of each mass can be written as:
n
x i (t)
for i = 1, 2, 3…….n
ij.a j (t)
j1
ij is the mode shape coordinate representing the position of the
ith mass in the jth mode. It depends on position, not time
aj(t) is the generalized coordinate representing the variation of the
response in mode j with time. It depends on time, not position
xi(t)
mi
= a1(t)
i1
+ a2(t)
Mode 1
i2
+ a3(t)
Mode 2
i3
Mode 3
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
In matrix form :
x a(t)
[] is a matrix in which the mode shapes are written as
columns
([]T is a matrix in which the mode shapes are written as
rows)
Differentiating with respect to time twice :
x a(t)
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
By substitution, the original equations of motion reduce
to:
Ga Ka T p(t)
The matrix [G] is diagonal, with the jth term equal
to :
n
Gj is the generalized mass in the jth
Gj
m i ij2
mode
i 1
The matrix [K] is also diagonal, with the jth term equal to :
n
K j ω 2j
i 1
m i ij2 ω 2j G j
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Ga Ka T p(t)
The right hand side is a single column, with the jth
term equal to :
T p(t) ij .p i (t)
P j (t) j
n
i 1
Pj(t) is the generalized force in the jth mode
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Ga Ka T p(t)
We now have a set of independent uncoupled
equations. Each one has the form :
G ja j K j a j Pj (t)
Gen. mass
This is the same in form as the equation of motion of a
single d.o.f. system, and the same solutions for aj(t)
can be used
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Ga Ka T p(t)
We now have a set of independent uncoupled
equations. Each one has the form :
G ja j K j a j Pj (t)
Gen. stiffness
This is the same in form as the equation of motion of a
single d.o.f. system, and the same solutions for aj(t)
can be used
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Ga Ka T p(t)
We now have a set of independent uncoupled
equations. Each one has the form :
G ja j K j a j Pj (t)
Gen.
force
This is the same in form as the equation of motion of a
single d.o.f. system, and the same solutions for aj(t)
can be used
Basic structural dynamics II
• Multi-degree of freedom structures – forced vibration
Ga Ka T p(t)
We now have a set of independent uncoupled
equations. Each one has the form :
G ja j K j a j Pj (t)
Gen.
coordinate
This is the same in form as the equation of motion of a
single d.o.f. system, and the same solutions for aj(t)
can be used
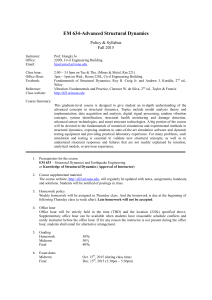
Basic structural dynamics II
• Cross-wind response of slender towers
f(t)
Cross-wind force is
approximately
sinusoidal in low
turbulence conditions
Basic structural dynamics II
• Cross-wind response of slender towers
Sinusoidal excitation model :
Assumptions :
• sinusoidal cross-wind force variation with time
• full correlation of forces over the height
• constant amplitude of fluctuating force coefficient
‘Deterministic’ model - not random
Sinusoidal excitation leads to sinusoidal response (deflection)
Basic structural dynamics II
• Cross-wind response of slender towers
Sinusoidal excitation model :
Equation of motion (jth mode):
G ja j K j a j Pj (t)
Gj is the ‘generalized’ or effective mass =
h
0
m(z) j 2 (z) dz
j(z) is mode shape
Pj(t) is the ‘generalized’ or effective force =
h
f(z, t) (z)
0
j
dz
Basic structural dynamics II
• Cross-wind response of slender towers
Sinusoidal excitation model :
Applied force is assumed to be sinusoidal with a frequency
equal to the vortex shedding frequency, ns
Maximum amplitude occurs at resonance when ns=nj
1
2
ρ
C
U
(z) b sin(2n j t ψ)
a l
Force per unit length of structure =
2
Cl = cross-wind (lift) force coefficient
b = width of tower
Basic structural dynamics II
• Cross-wind response of slender towers
Then generalized force in jth mode is :
1
P j (t) f(z, t) j (z) dz ρ a C l b sin(2π n j t ψ)
0
2
h
Pj,max sin(2n j t ψ)
Pj,max is the amplitude of the sinusoidal generalized force
1
ρ a C l b
2
h
0
U 2 (z) j (z) dz
h
0
U 2 (z) j (z) dz
Basic structural dynamics II
• Cross-wind response of slender towers
Then, maximum amplitude
a max
P j,max
2K j ζ j
P j,max
8π 2 n j 2 G j ζ j
Note analogy with single d.o.f system result
(Lecture 10)
Substituting for Pj,max :
a max
z2
1
2
ρ a C l b U (z) j (z) dz
z1
2
8π 2 n j 2 G j ζ j
Then, maximum deflection on structure at height, z,
x max (z) j (z).amax
(Slide 14 - considering only 1st mode contribution)
Basic structural dynamics II
• Cross-wind response of slender towers
Maximum deflection at top of structure
(Section 11.5.1 in ‘Wind Loading of Structures’)
h
h
C l j (z) dz
x max (h) ρ a C l b 0 j (z) dz
0
L
b
2
16π 2 G j ζ jSt 2
4π Sc St
j 2 (z) dz
2
0
where j is the critical damping ratio for the jth mode, equal to
n jb
nsb
St
U(z e ) U(z e )
Sc
4m j
ρa b2
Cj
2 GjK j
Strouhal Number for vortex shedding
ze = effective height ( 2h/3)
(Scruton Number or mass-damping parameter)
m = average mass/unit height
End of Lecture
John Holmes
225-405-3789 JHolmes@lsu.edu