doc - School of Electrical and Computer Engineering at Georgia Tech
advertisement

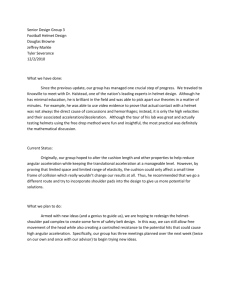
Multi-Chamber Programmable Air Cushion (MC-PAC) ECE4007 Senior Design Final Project Report Section L05, KJ7 Project Advisor, Dr, Arthur Koblasz Masahiro Ohno, Team Leader Joli-A Kabamba Joseph Suarez Seung Youl Paik Submitted May 5th, 2011 Georgia Institute of Technology College of Engineering School of Electrical and Computer Engineering KJ7 MC-PAC (ECE4007L05) i Table of Contents Executive Summary ......................................................................................................... iv 1. 2. 3. 4. Introduction ............................................................................................................... 1 1.1. Objective .............................................................................................................. 1 1.2. Motivation ............................................................................................................ 2 Project Description and Goals .................................................................................. 3 2.1. Pressure Adjustable Cushion................................................................................ 3 2.2. Controller for Pressure Distribution and Adjustment .......................................... 4 Technical Specification.............................................................................................. 5 3.1. Pressure Adjustable Cushion and its Internals ..................................................... 5 3.2. Pressure Adjustable Cushion Controller .............................................................. 5 3.3. Power Supply ....................................................................................................... 6 3.4. Air Compressor .................................................................................................... 7 Design Approach and Details ................................................................................... 7 4.1. Cushion................................................................................................................. 7 4.2. Power Source Circuit in MC-PAC ....................................................................... 9 4.3. Air Supply Pump ................................................................................................ 10 4.4. Pressure Monitoring and Amplifier.................................................................... 11 4.5. MSP430 Microcontroller and Associated Analogue ICs ................................... 11 4.6. Servo Air Valve Controls ................................................................................... 15 4.7. User Interface Switches for the Manual Mode................................................... 16 4.8. 16x2 LCD and Slaved 8-bit AVR MCU and TerraTerm Terminal Emulator ... 16 4.9. Circuit Block Diagram and Algorithm ............................................................... 17 4.10. Codes and Standards ....................................................................................... 19 5. Schedule, Tasks, and Milestones ............................................................................ 20 6. Results and Acceptance Testing ............................................................................. 21 7. 6.1. Functioning Components ................................................................................... 21 6.2. Short-Term Functional Testing .......................................................................... 22 6.3. Pressure Distribution Testing Plan ..................................................................... 24 6.4. Long-Term Testing Plan .................................................................................... 24 Budget and Cost Analysis ....................................................................................... 25 KJ7 MC-PAC (ECE4007L05) ii 7.1. Cost Minimization .............................................................................................. 27 7.2. Equipment Cost .................................................................................................. 27 7.3. Production Run Cost Estimate ........................................................................... 28 8. Conclusions and Future Work ............................................................................... 29 9. References................................................................................................................. 31 Appendix A – Air Manifold and Valve Drawing ......................................................... 33 Appendix B – Servo Motor Drawing and Spec ............................................................ 34 Appendix C – Digital Circuit Schematic ....................................................................... 35 Appendix D – Gantt Chart ............................................................................................. 36 KJ7 MC-PAC (ECE4007L05) iii Executive Summary Senior design team KJ7 is interested in a design to benefit the quality of life for people in wheelchairs. We met with the staff of Shepherd Spinal Center and researched the most pressing needs for wheelchair bound patients. Our findings indicate that many long-term wheelchair users, particularly with spinal cord injury, will develop pressure ulcers at some time. The main cause of ulcers is prolonged pressure on an area of skin, where blood flow is reduced; shifting pressure to a different area restores flow. The Market is limited to a handful of products most are air or gel-filled cushions, which are either one or more chambers that vary the pressure to a limited number of zones on a timer or just equalize the pressures of each chamber. Our team’s design goes beyond shifting or varying pressures with a timer. Our Multi Chamber Programmable Air Cushion (MC-PAC) has 25 independent air chambers connected to an air delivery system monitoring the pressure of each cell in near real-time. Our air chambers and delivery system are constructed and working. Currently the MCU is limited to controlling four cells, due to the lack of time to construct the boards needed for 25 cushions. The UI is currently limited to a simple status display of 2x16 characters and a few buttons, however all pressure data can be monitored on a PC by using TI’s Code Composer Studio. We had hoped to find a 12V pump to replace the 18V pump we have, but the cost was out of our budget. Our system uses 12V max supply and the pump runs weak at this level. The MCU programming continues as we test the limits of our cushion and the pressures required for comfort. The code will need to be further refined to drive the 25 cushions, monitor air leaks or stuck valves, as well as alert of any other malfunctions. KJ7 MC-PAC (ECE4007L05) iv Multi-Chamber Programmable Air Cushion (MC-PAC) 1. Introduction The Group KJ7 built a pressure adjustable cushion with a budget of $1,027 in total parts cost. This device is called MC-PAC and it is intended to prevent or reduce pressure ulcers on people with limited mobility. It is equipped with a pressure monitoring system that can manage the pressure inside each air chamber of the cushion and allows the user to change pressure levels as desired. 1.1. Objective The design group focused on developing a system capable of monitoring pressure inside each air chamber while the user is sitting on it. It also adjusts the pressure inside the cushion as needed. By dynamically changing the pressure levels inside each individual cushion, the MCPAC reduces the effect of shear, pressure, and friction on patient’s skin and minimizes the possibility of a pressure ulcer. To build such a system, the design group utilized an array of air chambers, connected each to a pressure sensor monitored by a microcontroller. The pressure reading and pressure adjustment inside the chamber is centrally performed by the TI MSP430F1611 microcontroller programmed using the C++ language. The air pump connected to the system sources air into each individual bladder to ensure the desired pressure levels. KJ7 MC-PAC (ECE4007L05) 1 1.2. Motivation The design team wanted to help reduce risk of pressure ulcers on wheelchair users with limited mobility. Shepherd Spinal Center of Atlanta has many paraplegic patients who are actively being monitored by caregivers to prevent pressure ulcer occurrence. These patients spend long hours per day on wheelchair and are at high risk of developing the pressure ulcer on their back due to exposure to friction, shear, and pressure. [1] To make matters worse, the paraplegic patients with Category A spinal injury do not have any sensory functions on their lower body. As a result, they cannot detect the pressure ulcer until it is too late. Statistics from the HCUP taken in United States from the 1993 through 2005 show a total of 503,300 hospital stays during which pressure ulcers were noted. Such number reflects a 78.9 percent increase from 1993 when the number was as low as 281,300 hospital stays related to pressure ulcers. In addition, the data also indicates that the mortality of the people with pressure ulcer is 5 times higher, and the mean length of hospital stay is 3 times higher than the people without pressure ulcers. [2] This indicates that the pressure ulcer is a serious issue that affects a large population in United States. From the Shepherd Spinal Center of Atlanta, Mr. David Kreutz, director of the wheelchair department, and Mr. Peter Collman, the facility coordinator, suggested the team to create a device which could potentially prevent or cure the pressure ulcer. They provided the team KJ7 with advice in regards of current hospital practice, and the testing facility to evaluate the pressure distribution of the cushion. [3] The KJ7 design group is also competing for a prize from the TI Analog University Design Contest. The prestige of winning this prize could promote Georgia Tech and open doors for future employment. Successful completion of this project provides learning opportunity for KJ7 MC-PAC (ECE4007L05) 2 the group members, and promotes the effectiveness of TI product in consumer medical products. By using the TI medical application semiconductors, we have designed a product that improves the standard of living for people who are at risk of developing pressure ulcers. 2. Project Description and Goals A person sitting on a chair is exerting an unequally distributed pressure on their buttocks against the chair. Spinal injury patients using wheelchairs are also exerting this uneven pressure, but they have no way to redistribute or adjust the pressure on their bodies. As a result, they are at high risk of developing pressure ulcers. MC-PAC helps these patients to remap the pressure distribution automatically, reducing the probability of developing pressure ulcers. 2.1. Pressure Adjustable Cushion The following design goals were established to define a successful product. 1. Automatically readjust the contact pressure without caregiver assistance using the method recommended by National Pressure Advisory Panel (NPUAP). NPUAP advises patients on wheelchairs to change their posture or release the contact pressure by lifting up from the cushion every 25 minutes. [4] 2. Manufacturer should be able to reprogram the cushion to tailor individual healing need of the patients based on the severity and the location of the pressure ulcer. 3. Material should provide soft and comfortable contact surface to the patients sitting on the programmable pressure cushion. KJ7 MC-PAC (ECE4007L05) 3 4. Cushion should be affordable in comparison to the other competitors in the market. 5. Battery life should be sufficient for daily use. 6. Cushion device should be sufficiently compact to allow this cushion to be carried on a wheelchair. Based on the above criteria, final evaluation showed that the design meets the (1) individual cushion control, (3) user comfort, and (5) battery life requirements. Further work needs to be done to improve (2) healing efficacy, (4) affordability, and (6) portability requirements. For more information on the potential areas of improvement, refer to future work section of this documentation in the Chapter 8. 2.2. Controller for Pressure Distribution and Adjustment Without the need of any user input, the cushion automatically readjusts the pressure in the individual air cushion to preset values every 10 minutes. If the user wishes to pause this cycle or readjust his posture, he can override the cycle by switching into a ‘manual mode’. On the manual mode, the user can inflate or deflate individual cells by pressing the corresponding button. The final design utilizes the 64-pin MSP430F1611 microcontroller housed in a compact enclosure attached on the side of the cushion. The function of the microcontroller is to: 1. Centrally probe the multiplexed inputs from 25 pressure sensors by using ADC input. 2. Command the servo motors to actuate the pressure cushion using its PWM output as well as the serial output. 3. Turn on or off the air pump using the digital output. KJ7 MC-PAC (ECE4007L05) 4 4. Store the air cushion inflation matrix and automatically readjust the pressure cushion every 10 minutes based on the pressure sensor reading. 5. Obtain user override inputs and adjust the pressure setting accordingly. 6. Output the cushion pressure information on the computer console. The in-depth discussion of the implemented microcontroller functions and user interface are discussed in the design details section in the Chapter 4. 3. Technical Specification 3.1. Pressure Adjustable Cushion and its Internals The prototype cushion consists of an array of 5x5 chambers. Each air chamber occupies one cell of the array. Air valves control inflation and deflation of chambers. The array of chambers is covered with a fabric; this fabric has a good breathability to maintain the surface cool and dry. The cover fabric also provides a smooth surface on the cushion to reduce shear damage. 3.2. Pressure Adjustable Cushion Controller The controller has following characteristics: (1) Measures air pressure in each air chamber. (2) Inflate and deflate the chamber when the microcontroller receives the corresponding user input signal or if the program instructs it to do so. (3) Display air pressure on an LCD. KJ7 MC-PAC (ECE4007L05) 5 For the ease of debugging, there are two interfaces to communicate with PC: one RS-232 serial interface through UART on the microcontroller, and one USB1.0 using a data converter from UART to USB. Table 1 – Specification of the Cushion Controller Circuit Microprocessor Manufacturer Product series Architecture CPU clock speed Input Analog input User input Output Semiconductor Switch - Maximum current LCD display Interface UART (RS-232, DSUB9) USB1.0 Texas instruments MSP430F1611 SCoC 16-bit RISC Orthogonal 8MHz 25 inputs 9 inputs 26 outputs 10A 16x2 LCD 1 1 3.3. Power Supply The cushion controller, air valve solenoids, and an air pump require certain voltages but different from each other: (1) voltage range between 1.8V and 3.6V for the microcontroller. (2) 18V for the solenoids and the air pump operate. (3) 5V voltage reference for the analog signals. KJ7 MC-PAC (ECE4007L05) 6 Table 2 – Specification of the Single Power Supply for the Cushion Input Input DC voltage Output Output 1 voltage Output 2 voltage Output 3 voltage 12VDC 5VDC 3.3VDC -3.3VDC 3.4. Air Compressor The design group has chosen an air compressor for the prototype. RYOBI 18V ONE+ P730 Inflator, an automatic inflator driven by 18VDC, supplies air pressure of up to 150PSI [6]. Table 3 – Specification of 18V ONE + P730 Model Manufacturer Product name Performance Battery voltage High Pressure Low Pressure RYOBI 18V ONE+ P730 Inflator 18V 0-150 PSI 0-40 PSI 4. Design Approach and Details 4.1. Cushion The final seat cushion design contains an array of air cells mounted on a solid base and covered with a material that resists abrasion, contains the air cells and is permeable to air. The initial step towards the cushion design started with a mock-up of a single air cell. The KJ7 MC-PAC (ECE4007L05) 7 characteristics and ease of construction and cost were determined and refined to produce a comfortable, durable and cost effective cushion for the final design. The design is similar to the one in Figure 1 that shows a design from ROHO group for the Quadtro cushion ™ [5]. For the first trail to control cells with a microcontroller and to modify the best value cushion, the ROHO mosaic (5x5) cell cushion are selected as the sample air cushion. This cushion has the cells connecting each other; therefore, each air path connecting next cell is sealed by heat and rubber glue to completely isolate from the master input and individual air intake. The modified air cushion is shown in the Figure 2 below. Figure 1. ROHO cushion patent image. KJ7 MC-PAC (ECE4007L05) 8 Figure 2. Modified ROHO Mosaic cushion for the MC-PAC Prototype. 4.2. Power Source Circuit in MC-PAC The electronics, actuators, and air pump must run on dc power and a source capable of driving all the above components without overheating. The most common power sources for wheelchairs are lead acid batteries that can be configured as 12 volt or 24 volt sources. Upon the MC-PAC active operation, +/-3.3V for most analog IC device chips on the circuit board, 5V for the pressure sensor voltage supply, servo actuator power, and Vcc of the 16x2 LCD module and its control MCU, and 12V 5A voltage source for the air pump operation, are required. On the prototype, a voltage linear low-voltage drop 5V out regulator LD1085V50, 3.3V regulator LD1117V33, and the DCDC converter MC34063A regulate voltages as desired levels of and KJ7 MC-PAC (ECE4007L05) 9 supply up to 3A (LD1085V50), and 500mA (LD1117V33 and MC34063 with associated passive components). This prototype board is shown in Figure 3. Figure 3. The prototype power supply circuit board. 4.3. Air Supply Pump An air pump is required to inflate the air cells to the required pressures. For the prototype, the design uses a motor and compressor from a RYOBI P730 tire inflator capable of delivering up to 120 psi. We used a pressure that is beyond the need for the design to help determine the minimum required pressure for the pump. For the future improvement, the pump should be as small and quiet as possible. The air is directed via plastic hose to an air supply block that channels air through passages. The pressure transducers and air control valves are mounted onto this block using standard NPT compression fittings. The block assembly outputs individual hoses that connect to each air bladder. A power MOSFET switch is designed for the air pump. KJ7 MC-PAC (ECE4007L05) 10 4.4. Pressure Monitoring and Amplifier 25 Freescale MPX2202 pressure transducers are mounted onto the pressure block to record the pressure inside each air cell. Since an each step of the voltage output from the MPX2202 is 2mV/1kPa, the differential voltage readings are very small to be read on the ADC accurately. We have resolved this issue by setting the voltage reference on the 12 bit ADC to read from 0V up to 2V, and amplifying the signal by the factor of 201 using 25 TI INA333 instrumentation amplifiers. 4.5. MSP430 Microcontroller and Associated Analogue ICs The main controller is a MSP430F1611 16 bit Mixed Signal Microcontroller by Texas Instruments (TI) [6]. The microcontroller MSP430F16xx series is optimized for medical application, but can also be used for other purposes. The code for MSP430 is written in C, which is compiled and debugged on the Code Composer Studio (CCS) v4 released by TI. The hardware programing and On-Chip-Debugging (OCD) can perform through MSP-FET430UIF debugger. The screenshot of the CCS, and a picture of MSP-FET430UIF and 64pin target development board are shown in Figure 4, 5, and 6. KJ7 MC-PAC (ECE4007L05) 11 Figure 4. Code Composer Studio v4 main build mode screenshot. KJ7 MC-PAC (ECE4007L05) 12 Figure 5. MSP-FET430UIF debugger and 64pin target development board. Using the MSP430F1611, we have implemented ADC12 (12-bit Analog-to-Digital Converter), Timer B, and USART0 in the main code. Since the MC-PAC has 25 individual cells in the cushion, the MSP430F1611 selects the input analogue signal to be read by the ADC. To achieve this, two Single-Ended 16-ch/Differential Input Analog Multiplexer MPC506 control the signal sequentially and select the analog signal to be read. The microcontroller outputs 4-bit address of the signal on the MPC506 and 1-bit signal with 74AC04 NOT gate device swaps EN signal between two MPC506. To control 14 servo motors for air valves, the PWM signals from Timer B pins are selected for the appropriate cell valves. B1, B2, and B3 continuously generate 50Hz periodic 1.1~1.5% Duty cycle periodic signal, and these are selected to connect with the servo using 74HCT08 AND gate logic chips. KJ7 MC-PAC (ECE4007L05) 13 Figure 6. MSP430F1611 circuit and function block diagram. For communication with PC for transmitting debug and current status display, data is transmitted through USART0 with CMOS logic level, through MAX3223, then into the PC through RS-232. The baud rate of the USART0 is 115.320 kbps. The MAX3223 will shut down (1µA auto-shutdown) when the input signals are not receiving any data for a while to save battery life. 16x2 LCD module and slave 8-bit microcontroller has the voltage H logic level of 5.0V, MSP430 cannot communicate with these devices without level-shift. 74ACT245 input tolerant bidirectional logic chip allows MSP430 to communicate AVR ATmega88 microcontroller to transmit signal with the level that ATmega88 recognizes. These are implemented in the digital communication board shown in Figure 7. KJ7 MC-PAC (ECE4007L05) 14 Figure 7. Picture of the digital communication board. (right chip is MAX3223 and left chip is 74ACT245). 4.6. Servo Air Valve Controls Air valves control the flow of air from the block to the air cells. The air valves are constructed with the combination of the mechanical push valve and servo motor to push the button. This system reduces budget and requires less number of control pins from MSP430. Control signals are sent out to position the servo motor in clockwise, counterclockwise, or center position to open the push valves. The servo motor requires the 50 Hz signal, and its duty cycle determines its position. This duty cycle signals are generated by Timer B in PWM mode and any duty cycle can be selected whenever TCCRx register are modified. The set of constructed servo motor air valves are shown in Figure 8. The diagram of the air block is shown in an Appendix A. KJ7 MC-PAC (ECE4007L05) 15 Figure 8. Constructed air valves controlled by servo motors. 4.7. User Interface Switches for the Manual Mode The microcontroller requires an interface for the user to properly use the system. The initial test is performed using the 7 external switches. The behavior of a toggle switch on the control extension board determines the algorithm state, manual control mode or autopilot mode. The 6 pushbutton-switches on the digital control input board are disabled when the system in the autopilot mode and error. 4.8. 16x2 LCD and Slaved 8-bit AVR MCU and TerraTerm Terminal Emulator For the User Interfaces, 16x2 LCD and Terminal emulator are used in the prototype. These have the simple routine to receive the USART or serial signal transmitted by the MSP430. One slave microcontroller AVR ATmega88 controls 16x2 LCD, and USART RxD pin is reserved for the data receive from MSP430. This microcontroller displays the cell number and the pressure level in the selected cell. KJ7 MC-PAC (ECE4007L05) 16 TeraTerm Terminal emulator (Figure 9) is a simple Terminal console, and can display the data received from DSUB-9 cable. MSP430F1611 transmits the all messages or data to display in TeraTerm using USART0 and all data is in ASCII code. Figure 9. TerraTerm serial port console for displaying the status of MC-PAC. 4.9. Circuit Block Diagram and Algorithm Figure 10 represents the simplified block/wiring diagram for the prototype of the MCPAC. I/O signals for the microcontroller are drawn as arrows while the bold line and lines without arrows are air tube lines. KJ7 MC-PAC (ECE4007L05) 17 Figure 10. The prototype system diagram of the MC-PAC. The algorithm of the prototype in demo is shown in Figure 11. The MSP430 reads the toggle switch behavior and determines its states ether manual mode or Autopilot mode; the mode can be switched anytime user wants. In manual mode, all push buttons on the control card are enabled, and user can select an individual cell and behavior on the cell inflation or deflation. In the autopilot mode, all switches are disabled except for a toggle switch for state changing, and reading cell pressures. In this mode, the MSP430 performs the pressure distribution configuration according to the preprogramed data. KJ7 MC-PAC (ECE4007L05) 18 Figure 11. State machine describing the basic code algorithm. 4.10. Codes and Standards Programming the MCU uses JTAG IEEE1149.1 [7] communication standard to upload the programmed code from the computer into the controller. The analog devices used for the circuits use CMOS standards. The power supply complies with National Electrical Safety Codes (NEC) [8]. Air pipe and sensor connections with threads will use ANSI/ASME NPT standard [9] fittings. MAX3223 converts the logic level from 3.3Vor 5.0V to RS-232 (EIA-232) level. KJ7 MC-PAC (ECE4007L05) 19 5. Schedule, Tasks, and Milestones In the Table 4 below, the project schedule is described. The tasks have been spread into the group members as follows: The brackets () for Responsible person represent (G) as group, (M) as Masahiro, (J) as Joe, (K) as Joli, and (S) as Scott. The brackets [] for Difficulty represent [L] as low, [M] as medium, and [H] as high. A Gantt chart is also available in an Appendix D. Table 4 - Schedule of Tasks and Milestones Task Name (Responsible Person) [Difficulty] Build Prototype Find Parts (G) [L] Parts ordered (G) [L] Assemble Parts (M, J, S, K) [M] Seal Cushion interconnect pipes (J) [H] Read Pressure with Sensors (M, J) [L] Display Pressure on LCD (S, K) [H] Make air valves and damp valves Build air pump driver (J,K) [M] Build pressure sensing amplifier (G) [L] Mount Air Pump and air valves (J) [M] Read an array of Pressure Sensors (T) [M] Program Microcontroller MSP430 (M,S) [H] Test Product & Troubleshooting Final reports & results Demo prototype at Senior design Lab Build Product Duration 74 days 12 days 11 days 9 days 7 days 5 days 10 days 4 days 2 days 2 days 6 days 12 days 25 days 14 days 4 days 1 day ------- Start 2/14/2011 2/14/2011 2/26/2011 3/2/2011 3/11/2011 3/11/2011 3/11/2011 3/21/2011 3/25/2011 3/30/2011 4/1/2011 4/5/2011 4/7/2011 4/21/2011 5/1/2011 5/5/2011 -------- Finish 5/5/2011 2/26/2011 3/6/2011 3/11/2011 3/18/2011 3/16/2011 3/22/2011 3/25/2011 3/30/2011 4/1/2011 4/7/2011 -------5/2/2011 5/5/2011 5/5/2011 5/5/2011 ---------- KJ7 MC-PAC (ECE4007L05) 20 6. Results and Acceptance Testing 6.1. Functioning Components At the end of the 2011 Spring semester, the team KJ7 constructed the functioning pressure cushion with four air segments operational. We have encountered difficulty in sealing the cushions which delayed the project by 4 weeks. In addition, constructing the amplifier circuitry for probing 25 pressure sensors delayed the project for additional 3 weeks. As a result, functional testing of the pressure cushion on May 1st involved operating the device using the four air segments instead of all 25. Figure 12 outlines the currently functioning air blocks. Figure 12. Photograph denoting the four functional air blocks. KJ7 MC-PAC (ECE4007L05) 21 Despite being able to operate only four air cells, other 21 air segments not being used for the functional test with corresponding pressure sensors and valves were also individually pressure tested to ensure that the project can be worked by the future senior design group without any issue. For the future work, enabling all 25 cells to operate independently will allow the pressure cushion to be installed on the wheelchair and field tested with paraplegic patients at Shepherd Medical Center. Future work section in Chapter 8 lists the items to be worked on by the future senior design group in order to operate all 25 air segments. 6.2. Short-Term Functional Testing Short term functional testing determined the (1) Proper sealing of each pressure chamber. (2) Accurate pressure monitoring in individual cushion, (3) Successful inflation and deflation cycle, (4) Servo motor actuation, (5) Accurate data display on the TerraTerm console window, (6) Resistance to water and incontinence, and (7) Battery life sufficient for daily use. Item (1) was verified by inflating a cushion and pressing on it with hand. While the cushion was pressed down, the air leakage was determined by placing soap compound on the pressure line. The leak areas have been verified and appropriately sealed using the sealing compounds. Item (2) and (5) were verified at the same time. The microcontroller was programmed to send the pressure data to the UI board, and it was monitored using the TerraTerm on the Laptop PC. This has been successfully verified. Item (3) and (4) were verified by turning on the MC-PAC and running it in both automatic and manual modes. Successful servo actuation cycle was observed, however the 18V KJ7 MC-PAC (ECE4007L05) 22 pump operating under 12V power was proven to be not powerful enough to maintain inflation while a person was sitting on the pressure cushion. Item (6) was not met because we did not have sufficient time to develop a waterproof enclosure. Item (7) was tested by monitoring the discharge current from the 12V battery. The plot of the current reading is shown in the Figure 13 and Table 5 below. Using this figure, the battery life is calculated to be 60 hours using the 100Ah battery. Figure 13. Plot of the MC-PAC discharge characteristic. Table 5 – Discharge Monitoring Result Current Draw while pump ON 2 – 5 Amps Current Draw while pump OFF 40 mA KJ7 MC-PAC (ECE4007L05) 23 6.3. Pressure Distribution Testing Plan As only four cushion segments are functional for the demo, it was not feasible to run the pressure distribution testing during this semester. Once all 25 air cells are functional, future senior design group should utilize the pressure mapping device located in a Shepherd Spinal Center to test the pressure distribution. This mapping device is used for custom fitting the wheelchair cushions for the patients, and it should provide sufficient information to judge the effectiveness of the pressure distribution of the cushion. This mapping device should be placed on a pressure cushion, and a patient or a test subject should sit on top of it. During the multiple 10 minute cycles of the automatic cycle mode, the effectiveness of the pressure distribution should be observed. 6.4. Long-Term Testing Plan The idea of the long-term testing plan is to determine if the MC-PAC is effective in reducing the occurrence of the pressure ulcers. Ideally, multiple copies of MC-PAC prototypes should be built and tested with paraplegic patients for the period of six months to one year. However, due to the time and budget constraint of the senior design project, this is not feasible. The second best option is to allow non-paraplegic wheelchair patients to use this device for a period of a week. This is because the paraplegic patients are unable to feel their lower bodies, which makes it impossible to judge the comfort level of the pressure cushion. After a week of using the pressure cushion, the patients should fill out a survey which requires them to rate the comfort level of the cushion. The survey should discuss about the following traits of the cushion: 1. In the various pressure settings on the automatic mode, which setting was most comfortable to sit in? KJ7 MC-PAC (ECE4007L05) 24 2. Which setting was most uncomfortable, and why? 3. Was there any discomfort or loss of balance when the pressure level shifted from one setting to another? 4. Was there any malfunctions or breakdowns experienced while using the pressure cushion? 5. How would you rate this pressure cushion? Since the friction, shear, and pressure are determined to be the major cause of the pressure ulcer, minimizing these effects improve the comfort level for the user. This comfort level is evaluated through this survey. Experimenters should note that the clothes being worn by the patient also affects the comfort level of the cushion. For the accurate test result, the experimenters should advise patients to wear comfortable pants while using this pressure cushion. After these tests have been performed, developers should improve the programmed pressure cycle saved on the microcontroller and retest to observe any change a patient comfort level. 7. Budget and Cost Analysis Taking labor and overhead into consideration, the total development cost for a prototype cushion is $68,345.33. Table 6 shows the detailed cost analysis calculation which was derived from actual hours worked on the project. However, as this is a student driven project, the actual cost incurred excludes the labor, overhead and sponsored parts. Taking this into account, the actual cost incurred for the Georgia Tech in supporting this project is $626.93. The detailed list and prices of all the sponsored and purchased parts are shown in the Table 7. KJ7 MC-PAC (ECE4007L05) 25 Table 6 – Project Cost Analysis Project Component Microcontroller Programming (in C++) Algorithm Coding UI Board Coding Code Debugging Equipment Design Sensor Integration Valve Integration Cushion Construction Prototype Assembly Testing, Demo Preparation Group Meetings Total Labor Fringe Benefits (30% of Labor) Overhead (120% of Labor and Fringe) Total Parts Cost ($) Project Total Labor Hours Labor Costs 80 80 150 $1,600.00 $1,600.00 $3,000.00 50 50 150 100 100 112 872 $1,000.00 $1,000.00 $3,000.00 $2,000.00 $2,000.00 $2,240.00 $17,440.00 $5,232.00 $27,206.40 Part Costs Total Cost $1,600.00 $1,600.00 $3,000.00 $100.00 $200.00 $100.00 $626.93 $1,100.00 $1,200.00 $3,100.00 $2,626.93 $2,000.00 $2,240.00 $17,440.00 $5,232.00 $27,206.40 $1,026.93 $68,345.33 Table 7 – List of Sponsored (Green) and Purchased Parts (White) Product Description TI MSP430F1611 (Controller) TI MSP-FET43OU64 (Programmer) TI INA333AIDGKR (Amplifier) TI MAX3223 (RS-232 Driver) TI TLC2558IDW (12-bit ADC) ROHO Mosaic Cushion Freescale MPX2202GP (Pressure Sensor) Hitec HS-422 Servo Motor AVR MEGA88 (User Interface Board) AVR STK500 (Programmer) Pololu Micro Serial Controller Chippard Minimatic Air Valves Schrader Valves 100Ah 12V Battery Other Supplies from the Senior Design Lab Qty 1 1 25 2 2 1 25 13 1 1 1 25 25 1 NA Unit Price $17.94 $149.00 $5.40 $1.08 $8.38 $97.00 $8.36 $10.00 $3.42 $83.00 $19.95 $5.43 $3.28 $50.00 NA Total Incurred Price $17.94 $149.00 $135.00 $2.16 $16.76 $97.00 $209.00 $130.00 $3.42 $83.00 $19.95 $135.75 $82.00 $50.00 $50.00 $1,130.98 $626.93 KJ7 MC-PAC (ECE4007L05) 26 7.1. Cost Minimization In order to minimize the cost of the components, the team used servo motors with presson valves in place of the solenoid air valves. Price search showed that 12V solenoid air valves cost approximately $20/pcs as opposed to servo motors which are $10/pcs and readily available in the senior design laboratory. For actual production component, the solenoid valves would make more financial sense as they do not require external valving and cost about $2/pcs when purchased in a bulk of 1000. [10] In addition, the solenoid valves are simpler and more robust compared to the servo motors. For the prototype, we utilized the PWM Timer B outputs on the MSP430F1611 to control the 13 servo motors for the pressure cushion. 7.2. Equipment Cost Shown below in Table 8 is the list of major equipment used in development and testing of the pressure cushion. All equipment was provided in the senior design lab, including the hot air rework station used for the pressure cushion sealing. Table 8 – List of Sponsored (Green) and Purchased Parts (White) Equipment Oscilloscope Multimeter (Agilant 34405A) Hot Air Rework Station Soldering Station Drill Press Reflow Solder Oven Heat Gun Laptop Approx. Unit Price $300.00 $668.00 $250.00 $82.00 $200.00 $1,000.00 $100.00 $1,000.00 KJ7 MC-PAC (ECE4007L05) 27 7.3. Production Run Cost Estimate The production price is calculated using the expected production material costs. Labor cost was calculated based on $20/hr salary. In addition to assembly and testing labor, 5 hours of customer support was added to the labor cost. This is a labor required to customize the product programming for meeting individual consumer demands. Equipment cost includes the assembly equipment, pressure bag assembly equipment, and the pressure mat for testing. With the 10% sales expense and overhead accounted for, the product is financially feasible if 5000 units are sold for $2000 over the span of 5 years. $324.33 profit per unit is expected. The result is shown in Table 9 below. Table 9 – Per Unit Production Run Cost (Based on 5000 units per 5 years) Production Item Development Cost per Unit Labor Cost Assembly Labor (2 hours) Testing Labor (1 hour) Customer Support (5 hours) Fringe Benefits (30% of Labor) Other Costs Production Equipment ($500,000) Material Costs Overhead (120% of Matl, Labor, Fringe) Sales Expense (10% of Selling Price) Selling Price Profit Per Unit Cost $13.67 $40.00 $20.00 $100.00 $48.00 $100.00 $411.00 $743.00 $200.00 $2,000.00 $324.33 KJ7 MC-PAC (ECE4007L05) 28 8. Conclusions and Future Work Demonstration Results will be placed in this Section. Demo rescheduled for 3:30pm Fri. The prototype MC-PAC that the team demonstrated only had four cushions out of the 25 that we planned to control. The system has 2 modes of operation, Automatic and Manual. In auto mode the controller reads the pressure of the cushion, decides whether to inflate or deflate. After setting the desired pressure or finding the pressure already correct, the controller checks the next cushion in the same way until every cushion is monitored and adjusted. The air control system was completed and fully assembled including the pressure sensors embedded in the manifold. The original design of the air system would have been better and easier to control. Future teams may try to find air valve that meet the budget requirements for senior design. The control of servos was a last minute solution to the problem of finding air vales. But the servos introduced another element of complexity to the design. Separate power supplies for the servo motors and coding for the MCU to produce pwm needed to operate the servos took longer to create and test. If future students can find solenoids that would fit the existing air manifold and push the valves, some of the complexity could be reduced, since solenoids only require an on-off signal to operate with a mosfet. The cushion assembly still has some leaks as we anticipated when we decided to modify an existing product. A better solution for the cushion would be to create a mold for one individual cushion and cast it with a good elastomeric material. A flange for the inlet pipe should be part of the cushion design. By making one mold and casting as many cushion cells as needed, the design would be more flexible and easy to repair if one cushion is damaged. The air pump used requires 18V to operate and provides higher pressures than the design needs, our system KJ7 MC-PAC (ECE4007L05) 29 only provides 12V supply and do not need pressures greater than 10 or 15 psi. A smaller pump should be quieter and reduce some of the circuitry needed to supply enough power to drive the big pump. Another consideration would be to use a more powerful MCU board that can handle the power requirements of our system or has onboard power supplies for device driving with mosfets. The following list includes some ideas from the preceding notes and some other improvements that should be considered for future work. Use solenoids with existing manifold assembly (preferred because sensors already built into it) Find cheap air valves and build new manifold assembly Create a mold to cast individual air cushions that are ready for inlet fittings Chose cushion material that is easy to cast, flexible, non-toxic and durable Find small air pump which compromises low power with high volume and medium pressures up to 10 or 15 psi (should be quiet if possible, a housing could be used to insulate) Find or create an MCU board that is designed to drive a variety of devices with different power needs (A bonus would be to have native display interface capable of graphics for the UI) KJ7 MC-PAC (ECE4007L05) 30 A screen with a built in camera and facial recognition software and speech recognition such as Dragon Naturally Speaking to control the functions. (mobile app with same features could be used if able to integrate with MCU) Find a cheap or donated Pressure mapping system to test system performance (a cheap mapping mat could be used instead of the pressure sensors, software would be needed to integrate data into the system, would provide very good graphic representation of pressure points) Box to hold cushion could be made lighter by using cheap fiberglass or pricier carbon fiber The box could be sized to fit the manifolds, pump and electronics under it Vented air from the valves could be diverted up into the cushion area as ventilation to the user 9. References [1] Jeffrey A. et al, “The Effective Management of Pressure Ulcers,” Advances in Skin & Wound Care: The Journal for Prevention and Healing, vol. 19, no.1, pp 3-15, 2006. [2] C. Allison M.P.H. et al. “Hospitalizations Related to Pressure Ulcers among Adults 18 Years and Older, 2006” [online] Statistical Brief #64, December 2008. Available: http://www.hcup-us.ahrq.gov/reports/statbriefs/sb64.jsp [Access date: Apr.24, 2011] [3] David Kreutz, Assistive Technologies Member at Shepherd Spinal Center (Atlanta, GA), Feb 3, 2011, Interviewed regarding pressure sores and technologies used for their prevention. [4] NPUAP, “Pressure Ulcer Prevention Quick Reference Guide,” [online], Available: www.npuap.org/. [Access date: Feb. 19, 2011]. KJ7 MC-PAC (ECE4007L05) 31 [5] ROHO, “Low Profile Quadtro Select Cushion” Available: http://www.therohogroup.com/products/seat%20cushions/low_profile_quadtro_select_cushi on.jsp [Access date: Feb. 19, 2011]. [6] RYOBI, “RYOBI power Tool: 18V One+,” [online], Available: www.ryobitools.com/catalog/power_tools/specialty_tools/P730. [Access date: Feb 19, 2011]. [7] IEEE Standard Test Access Port and Boundary-Scan Architecture, IEEE Standard 1149.1, 1990. [8] National Electrical Safety Code, IEEE Standard C2, 2012. [9] National Pipe Thread Taper, ANSI/ASME B1.20.1, 2006. [10] Alibaba, “Alibaba Product-gs,” [Online], Available: http://www.alibaba.com/productgs/398232309/ZHV_0837_Air_Solenoid_Valve_DC.html. [Accessed Feb. 4, 2011] [11] Graebe et al, "Valve for zoned cellular cushion," U.S. Patent 6,564,410, May 20, 2003. KJ7 MC-PAC (ECE4007L05) 32 Appendix A – Air Manifold and Valve Drawing KJ7 MC-PAC (ECE4007L05) 33 Appendix B – Servo Motor Drawing and Spec KJ7 MC-PAC (ECE4007L05) 34 Appendix C – Digital Circuit Schematic KJ7 MC-PAC (ECE4007L05) 35 Appendix D – Gantt Chart KJ7 MC-PAC (ECE4007L05) 36