Document
advertisement

IE241 Introduction to
Mathematical Statistics
Topic
Slide
Probability …………………………………………………….….3
a priori …………………………………………………..4
set theory ……………………………………………..10
axiomatic definition ………………………………….14
marginal probability ………………………………………. 17
conditional probability ……………………………….19
independent events …………………………………20
Bayes’ formula ……………………………………….28
Discrete sample spaces ……………………………….33
permutations ………………………………………….34
combinations ………………………………………… 35
Statistical distributions …………………………………37
random variable ……………………………………...38
binomial distribution ………………………………….42
Moments ………………………………………………….47
moment generating function …………………….…50
Other discrete distributions ……………………………59
Poisson …………………………………………………59
Hypergeometric ………………………………………62
Negative binomial ……………………………………66
Continuous distributions ……………………………….69
Normal ………………………………………………….70
Normal approximation to binomial ……………… ..79
Uniform (rectangular) ………………………………..84
Gamma………………………………………………… 85
Beta …………………………………………………… 86
Log normal …………………………………………….87
Cumulative distributions…..……………………………89
Normal cdf……………………………………………..90
Binomial cdf ………………………………………….94
Empirical distributions …………………………………99
Random sampling ……………………………………99
Topic
Slide
Estimate of mean ………………………………….112
Estimate of variance ……………………………….113
degrees of freedom ………………………………..116
KAIST sample ………………………………………..119
Percentiles and quartiles……………………………………122
Sampling distributions ……………………………..…124
of the mean …………………………………..……..126
Central Limit Theorem………………………………127
Confidence intervals ………………………………….130
for the mean …………………………………………130
Student’s t ……………………………………………137
for the variance ……………………………………..143
Chi-square distribution …………………………….143
Coefficient of variation ……………………………….146
Properties of estimators………………………………149
unbiased……………………………………………… 150
consistent……………………………………………..152
minimum variances unbiased …………………….152
maximum likelihood…………………………………154
Statistical Process Control……………………………157
Linear functions of random variables ………………170
Multivariate distributions ……………………..………177
bivariate normal ………….………………………….177
correlation coefficient ………………………………182
covariance ……………………………………………183
Regression functions ………………………………….198
method of least squares……………………………199
multiple regression ………………………………….206
General multivariate normal…………………………211
Multinomial……………………………………………… 215
Marginal distributions………………………………….228
Conditional distributions………………………………236
2
Statistics is the discipline that permits
you to make decisions in the face of
uncertainty. Probability, a division of
mathematics, is the theory of uncertainty.
Statistics is based on probability theory,
but is not strictly a division of
mathematics.
However, in order to understand statistical
theory and procedures, you must have an
understanding of the basics of probability.
3
Probability arose in the 17th
century because of games of
chance. Its definition at the time
was an a priori one:
If there are n mutually exclusive,
equally likely outcomes and
if nA of these outcomes have
attribute A, then the probability of
A is nA/n.
4
This definition of probability seems reasonable for
certain situations. For example, if one wants the
probability of a diamond in a selection from a card
deck, then A = ♦, nA = 13, n = 52 and the probability
of a diamond = 13/52 =1/4.
As another example, consider the probability of an
even number on one roll of a die. In this case, A =
even number on roll, n = 6, nA = 3, and the
probability of an even number = 3/6 = 1/2.
As a third example, you are interested in the
probability of J♦ on one draw from a card deck.
Then A = J♦, n = 52, and nA = 1, so the probability of
J♦ = 1/52.
5
The conditions of equally likely and mutually exclusive
are critical to this a priori approach.
For example, suppose you want the probability of the
event A, where A is either a king or a spade drawn at
random from a new deck. Now when you figure the
number of ways you can achieve the event A, you
count 13 spades and 4 kings, which seems to give
nA = 17, for a probability of 17/52.
But one of the kings is a spade, so kings and spades
are not mutually exclusive. This means that you are
double counting. The correct answer is nA = 16, for a
probability of 16/52.
6
As another example, suppose the event A is
2 heads in two tosses of a fair coin. Now the
outcomes are 2H, 2T, or 1 of each. This
would seem to give a probability of 1/3.
But the last outcome really has twice the
probability of each of the others because the
right way to list the outcomes is: HH, TT, HT,
TH. Now we see that 1 head and 1 tail can
occur in either of two ways and the correct
probability of 2H is 1/4.
7
But there are some problems with the a priori
approach.
Suppose you want the probability that a
positive integer drawn at random is even.
You might assume that it would be 1/2, but
since there are infinitely many integers and
they need not be ordered in any given way,
there is no way to prove that the probability
of an even integer = 1/2.
The integers can even be ordered so that the
ratio of evens to odds oscillates and never
approaches any definite value as n increases.
8
Besides the difficulty of an infinite
number of possible outcomes, there is
also another problem with the a priori
definition. Suppose the outcomes are
not equally likely.
As an example, suppose that a coin is
biased in favor of heads. Now it is
clearly not correct to say that the
probability of a head = the probability of
a tail = 1/2 in a given toss of a coin.
9
Because of these difficulties, another
definition of probability arose which is based
on set theory.
Imagine a conceptual experiment that can be
repeated under similar conditions. Each
outcome of the experiment is called a sample
point s. The totality of all sample points
resulting from this experiment is called a
sample space S.
An example is two tosses of a coin. In this
case, there are four sample points in S:
(H,H), (H,T), (T,H), (T,T).
10
Some definitions
• If s is an element of S, then s∈S.
• Two sets are equal if every element of one is
also an element of the other.
• If every element of S1 is an element of S, but
not conversely, then S1 is a subset of S,
denoted S1⊂S.
• The universal set is S where all other sets are
subsets of S.
11
More definitions
• The complement of a set A with respect to
the sample space S is the set of points in S
but not in A. It is usually denoted A .
• If a set contains no sample points, it is called
the null set, φ.
• If S1 and S2 are two sets ⊂S, then all sample
points in S1 or S2 or both are called the
union of S1 and S2 which is denoted S1∪ S2.
12
More definitions
•
If S1 and S2 are two sets ⊂S, then the
event consisting of points in both S1 and
S2 is called the intersection of S1 and S2
which is denoted S1 ∩ S2.
•
S is called a continuous sample space if S
contains a continuum of points.
•
S is called a discrete sample space if S
contains a discrete number of points or a
countable infinity of points which can be put
in one-to-one correspondence with the
positive integers.
13
Now we can proceed with the axiomatic
definition of probability. Let S be a sample
space where A is an event in S. Then P is a
probability function on S if the following three
axioms are satisfied:
• Axiom 1. P(A) is a real nonnegative number
for every event A in S.
• Axiom 2. P(S) = 1.
• Axiom 3. If S1, S2, … Sn is a sequence of
mutually exclusive events in S, that is, if
Si ∩ Sj= φ for all i,j where i≠j, then
P(S1∪S2∪…∪Sn) = P(S1)+P(S2)+…+P(Sn)
14
Some theorems that follow from this definition
• If A is an event in S, then the probability that
A does not happen = 1- P(A).
• If A is an event in S, then 0 ≤ P(A) ≤ 1.
• P(φ) = 0.
• If A and B are any two events in S, then
P(A∪B) = P(A)+ P(B) – P(A ∩ B) where
A ∩ B represents the joint occurrence of both
A and B. P(A ∩ B) is also called P(A,B).
15
As an illustration of this last theorem -in S, there are many points, but the event
A and the event B are overlapping. If we
didn’t subtract the P(A∩B) portion, we
would be counting it twice for P(AUB).
A
B
16
Marginal probability is the term used
when one or more criteria of
classification is ignored.
Let’s say we have a sample of 60
people who are either male or female
and also who are either rich, middleclass, or poor.
17
In this case, we have the cross-tabulation of
gender and financial status shown in the table
below.
Status
Rich
Middle
-class
Poor
Gender
marginal
Male
3
28
3
34
Female
1
20
5
26
Status
marginal
4
48
8
60
Gender
The marginal probability of male is 34/60 and
the marginal probability of middle-class is
48/60.
18
More theorems
• If A and B are two events in S such that
P(B)>0, the conditional probability of A
given that B has happened is
P(A| B) = P(A ∩ B) / P(B).
• Then it follows that the joint probability
P(A ∩ B) = P(A| B) P(B).
19
More theorems
•
If A and B are two events in S, A and
B are independent of one another if
any of the following is satisfied:
P(A| B)= P(A)
P(B| A)= P(B)
P(A ∩ B) = P(A) P(B)
20
• P(A ∪ B) is the probability that either the
event A or the event B happens. When we
talk about either/or situations, we always are
adding probabilities.
P(A ∪ B) = P(A) + P(B) – P(A,B)
• P(A ∩ B) or P(A,B) is the probability that both
the event A and the event B happen. When
we talk about both/and situations, we are
always multiplying probabilities.
P(A ∩ B) = P(A) P(B) if A and B are
independent and
P(A ∩ B) = P(A|B) P(B) if A and B are not
independent.
21
As an example of conditional probability, consider an
urn with 6 red balls and 4 black balls. If two balls are
drawn without replacement, what is the probability
that the second ball is red if we know that the first
was red?
Let B be the event that the first ball is red and A be
the event the second ball is red. P(A ∩ B) is the
probability that both balls are red.
There are 10C2 = 45 ways of drawing two balls and
6C2 = 15 ways of getting two red balls.
So P(A ∩ B) = 15 / 45 = 1/3. P(B), the probability
that the first ball is red is 6/10 = 3/5.
Therefore, P(A| B) = 1/3 = 5/9.
3/5
22
This probability could be computed from the
sample space directly because once the first
red ball has been drawn, there remain only 5
red balls and 4 black balls. So the probability
of drawing red the second time is 5/9.
The idea of conditional probability is to
reduce the total sample space to that portion
of the sample space after the given event has
happened. All possible probabilities
computed in this reduced sample space must
sum to 1. So the probability of drawing black
the second time = 4/9.
23
Another example involves a test for detecting
cancer which has been developed and is
being tested in a large hospital.
It was found that 98% of cancer patients
reacted positively to the test, while only 4% of
non-cancer patients reacted positively.
If 3% of the patients in the hospital have
cancer, what is the probability that a patient
selected at random from the hospital who
reacts positively will have cancer?
24
Given:
P(reaction | cancer) = .98
P(reaction | no cancer) = .04
P(cancer) = .03
P(no cancer) = .97
Needed:
P (reaction & cancer )
P (cancer | reaction)
P (reaction)
25
P(r & c ) = P(r|c) P(c)
= (.98)(.03)
= .0294
P(r & nc) = P(r|nc) P(nc)
= (.04)(.97)
= .0388
P(r) = P(r & c)+ P(r & nc)
= .0294 + .0388
= .0682
26
Now we have the information we need
to solve the problem.
P (reaction & cancer )
P (cancer | reaction)
P (reaction)
.0294
P (cancer | reaction)
.4312
.0682
27
Conditional probability led to the development of
Bayes’ formula, which is used to determine the
likelihood of a hypothesis, given an outcome.
P ( H i | D)
P(Hi )P(D | Hi )
k
P(H )P(D | H )
i 1
i
i
This formula gives the likelihood of Hi given the data
D you actually got versus the total likelihood of every
hypothesis given the data you got. So Bayes’
strategy is a likelihood ratio test.
Bayes’ formula is one way of dealing with questions
like the last one. If we find a reaction, what is the
probability that it was caused by cancer?
28
Now let’s cast Bayes’ formula in the context
of our cancer situation, where there are two
possible hypotheses that might cause the
reaction, cancer and other.
P (C | R)
P (C ) P ( R | C )
P (C ) P ( R | C ) P (O ) P ( R | O )
(.03)(.98)
(.03)(. 98) (.97)(.04)
.0294
.0294 .0388
0.4312
P (C | R)
which confirms what we got with the classic
conditional probability approach.
29
Consider another simple example where there are two identical
boxes. Box 1 contains 2 red balls and box 2 contains 1 red
ball and 1 white ball. Now a box is selected by chance and 1
ball is drawn from it, which turns out to be red. What is the
probability that Box 1 was the one that was selected?
Using conditional probability, we would find
P ( Box1 | R)
P ( Box1, R)
P ( R)
and get the numerator by
P(Box1,R) = P(Box1)P(R|Box1)
= (½ )(1)
= 1/2
Then we get the denominator by
P(R) =P(Box1,R) + P(Box2,R)
= ½
+
¼
= 3/4
30
Putting these in the formula,
P ( Box1 | R)
P ( Box1, R)
P ( R)
1/ 2
3/ 4
2
3
If we use the sample space method, we have
four equally likely outcomes:
B1R1
B1R2
B2R
B2W
The condition R restricts the sample space to the
first three of these, each with probability 1/3.
Then
P(Box1|R) = 2/3
31
Now let’s try it with Bayes’ formula. There are only two
hypotheses here, so H1= Box1 and H2 = Box2. The data, of
course, = R. So we can find
P ( B1 | R)
P ( B1 ) P ( R | B1 )
P ( B1 ) P ( R | B1 ) P ( B2 ) P ( R | B2 )
(1 / 2)(1)
2
(1 / 2)(1) (1 / 2)(1 / 2) 3
And we can find
P ( B2 | R)
P ( B2 ) P ( R | B2 )
P ( B1 ) P ( R | B1 ) P ( B2 ) P ( R | B2 )
(1 / 2)(1 / 2)
1
(1 / 2)(1) (1 / 2)(1 / 2) 3
So we can see that the odds of the data favoring Box1 to Box2
are 2:1.
32
Discrete sample spaces with a finite number of
points
• Let s1, s2, s3, … sn be n sample points in S
which are equally likely. Then
P(s1) = P(s2) = P(s3) … P(sn) = 1/n.
If nA of these sample points are in the event A,
then P(A) = nA /n, which is the same as the
a priori definition.
• Clearly this definition satisfies the axiomatic
conditions because the sample points are
mutually exclusive and equally likely.
33
Now we need to know how many arrangements of a
set of objects there are. Take as an example the
number of arrangements of the three letters a, b, c.
In this case, the answer is easy:
abc, acb, bac, bca, cab, cba.
But if the number of arrangements were much larger,
it would be nice to have a formula that figures out
how many for us. This formula is the number of
arrangements or permutations of N things = N!.
Now we can find the number of permutations of N
things if we take only x of them at a time. This
formula is NPx = N! / (N-x)!
34
Next we want to know how many
combinations of a set of N objects there are if
we take x of them at a time. This is different
from the number of permutations because we
don’t care about the ordering of the objects,
so abc and cab count as one combination
though they represent two permutations.
The formula for the number of combinations
of N things taking x at a time is
N
N!
N Cx
x x!( N x )!
35
How many pairs of cards can be drawn from a deck,
where we don’t care about the order in which they
are drawn? The solution is
52 C 2
52!
1326
2!(52 2)!
ways that two cards can be drawn.
Now suppose we want to know the probability that
both cards will be spades. Since there are 13
spades in the deck and we are drawing 2 cards, the
number of ways that 2 spades can be drawn from the
13 available is
13!
78
13 C 2
2!(13 2)!
So the probability that two spades will be drawn is
78 /1326.
36
Statistical Distributions
Now we begin the study of statistical
distributions. If there is a distribution, then
something must be being distributed. This
something is a random variable.
You are familiar with variables in functions
like a linear form: y = a x + b. In this case,
a and b are constants for any given linear
function and x and y are variables.
In the equation for the circumference of a
circle, we have C = πd where C and d are
variables and π is a constant.
37
A random variable is different from a
mathematical variable because it has a
probability function associated with it.
More precisely, a random variable is a
real-valued function defined on a
probability space, where the function
transforms points of S into values on
the real axis.
38
For example, the number of heads
in two tosses of a fair coin can be
transformed as:
Points
in S
X(s)
s1 s2 s3
HH HT TH
2
1
1
s4
TT
0
Now X(s) is real-valued and can be
used in a distribution function.
39
Because a probability is associated with each
element in S, this probability is now
associated with each corresponding value of
the random variable.
There are two kinds of random variables:
discrete and continuous.
• A random variable is discrete if it assumes
only a finite (or denumerable) number of
values.
• A random variable is continuous if it assumes
a continuum of values.
40
We begin with discrete random variables.
Consider a random experiment where four fair
coins are tossed and the number of heads is
recorded.
In this case, the random variable X takes on
the five values: 0, 1, 2, 3, 4. The probability
associated with each value of the random
variable X is called its probability function p(X)
or probability mass function, because the
probability is massed at each of a discrete
number of points.
41
One of the most frequently used
discrete distributions in applications of
statistics is the binomial. The binomial
distribution is used for n repeated trials
of a given experiment, such as tossing
a coin. In this case, the random
variable X has the probability function:
P(x) = nCx pxqn-x where p+q =1
x =0,1,2,3,…,n
42
In one toss of a coin, this reduces to pxq0 and is
called the point binomial or Bernoulli distribution.
p = the probability that an event will occur and, of
course, q = the probability that it will not occur.
p and n are called parameters of this family of
distributions. Each time either p or n changes, we
have a new member of the binomial family of
distributions, just as each time a or b changed in the
linear function we had a new member of the family of
linear functions.
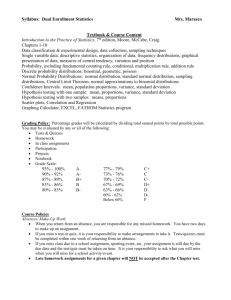
The binomial distribution for 10 tosses of a fair coin
is shown below. The actual values are shown in the
accompanying table. Note the symmetry of the
distribution. This always happens when p = .5.
43
B ino mial distributio n fo r 1 0 to sses o f a fair co in
0 .2 5
P(x)
0 .2
0 .1 5
0 .1
0 .0 5
0
0
1
2
3
4
5
6
7
8
9
10
Number o f heads
44
X
P(x)
0 0.000977
1 0.009766
2 0.043945
3 0.117188
4 0.205078
5 0.246094
6 0.205078
7 0.117188
8 0.043945
9 0.009766
10 0.000977
45
The probability of 5 heads is highest so
5 is called the mode of x. The mode of
any distribution is its most frequently
occurring value. The mode is a
measure of central tendency.
5 is also the mean of X, which in
general for the binomial = np. The
mean of any distribution is the most
important measure of central tendency.
It is the measure of location on the xaxis.
46
Every distribution has a set of moments.
Moments for theoretical distributions are
expected values of powers of the random
variable. The rth moment is E(X-θ)r where E
is the expectation operator and θ is an origin.
The expected value of a random variable is
defined as
E(X) ≡ μ
where μ is Greek because it is the theoretical
mean or average of the random variable.
μ is the first moment about 0.
47
The second moment is about μ itself
E(X- μ)2
and is called the variance σ2 of the
random variable.
The third moment E(X- μ)3 is also
about μ and is a measure of skewness
or non-symmetry of the distribution.
48
The mean of the distribution is a measure of
its location on the x axis. The mean is the
only point such that the sum of the deviations
from it = 0. The mean is the most important
measure of centrality of the distribution.
The variance is a measure of the spread of the
distribution or the extent of its variability.
The mean and variance are the two most
important moments.
49
Every distribution has a moment
generating function (mgf), which for a
discrete distribution is
M x ( ) e x p( x )
x 0
50
The way this works is
M x ( ) e x p( x )
x 0
Assume that p(x) is a function such that the
series above converges. Then
2 x 2 3 x3
M x ( ) 1 x
... p( x )
2!
3!
x 0
2 2
p( x) xp( x) x p( x) ...
2! x 0
x 0
x 0
1
'
1
2
2!
'
2
3
3!
...
'
3
51
In this expression, the coefficient of θk/k! is
the kth moment about the origin.
'
To evaluate a particular moment, k
it may be convenient to compute the proper
derivative of Mx(θ) at θ = 0, since repeated
differentiation of this moment generating
function will show that
k
d
M
'
k
k
d θ 0
52
From the mgf, we can find the first
moment around θ =0, which is the
mean. The mean of the binomial = np.
We can also find the second moment
around θ = μ, the variance. The
variance of the binomial = npq.
The mgf enables us to find all the
moments of a distribution.
53
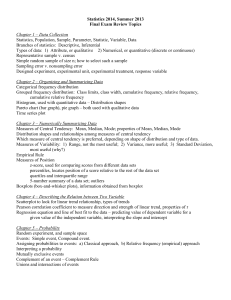
Now suppose in our binomial we
change p to .7. Then a different
binomial distribution function results, as
shown in the next graph and the table
of data accompanying it.
This makes sense because with a
probability of .7 that you will get heads,
you should see more heads.
54
B ino mial distributio n fo r 1 0 to sses o f a co in with p = .7
0.3
0.25
P(x)
0.2
0.15
0.1
0.05
0
0
1
2
3
4
5
6
7
Number of heads
8
9
10
55
X
0
1
2
3
4
5
6
7
8
9
10
P(x)
5.9E-06
0.000138
0.001447
0.009002
0.036757
0.102919
0.200121
0.266828
0.233474
0.121061
0.028248
56
This distribution is called a skewed
distribution because it is not symmetric.
Skewing can be in either the positive or
the negative direction. The skew is
named by the direction of the long tail
of the distribution. The measure of
skew is the third moment around θ = μ.
So the binomial with p = .7 is negatively
skewed.
57
The mean of this binomial = np = 10(.7)
= 7. So you will expect more heads
when the probability of heads is greater
than that of tails.
The variance of this binomial is
npq =10(.7)(.3) = 2.1.
58
Another discrete distribution that comes in
handy when p is very small is the Poisson
distribution. Its distribution function is
(e μ x )
P ( x)
x!
where μ >0
In the Poisson distribution, the parameter is μ,
which is the mean value of x in this
distribution.
59
The Poisson distribution is an approximation to the
binomial distribution when np is large relative to p
and n is large relative to np. Because it does not
involve n, it is particularly useful when n is unknown.
As an example of the Poisson, assume that a volume
V of some fluid contains a large number n of some
very small organisms. These organisms have no
social instincts and therefore are just as likely to
appear in one part of the liquid as in any other part.
Now take a drop D of the liquid to examine under a
microscope. Then the probability that any one of the
organisms appears in D is D/V.
60
The probability that x of them are in D is
D
nCx
V
x
V D
V
n x
The Poisson is an approximation to this
expression, which is simply a binomial
in which p = D/V is very small.
The above binomial can be transformed
to the Poisson:
e
Dd
Dd
x
x!
where Dd = μ and n/V = d.
61
Another discrete distribution is the
hypergeometric distribution, which is
used when there is no replacement after
each experiment.
Because there is no replacement, the
value of p changes from one trial to the
next. In the binomial, p is always
constant from trial to trial.
62
Suppose that 20 applicants appear for a job
interview and only 5 will be selected. The
value of p for the first selection is 1/20.
After the first applicant is selected, p
changes from 1/20 to 1/19 because the one
selected is not thrown back in to be selected
again.
For the 5th selection, p has moved to 1/16,
which is quite different from the original 1/20.
63
Now if there had been 1000 applicants
and only 2 were going to be selected,
p would change from 1/1000 to 1/999,
which is not enough of a change to be
important.
So the binomial could be used here
with little error arising from the
assumptions that the trials are
independent and p is constant.
64
The hypergeometric distribution is
p( x )
( Np C x )( N Np C n x )
N Cn
65
Another discrete distribution is the
negative binomial. The negative
binomial distribution is used for the
question “On which trial(s) will the first
(and later) success(es) come?”
Let p be the probability of success and
let p(X) be the probability that exactly
x+r trials will be needed to produce r
successes.
66
The negative binomial is:
p(x) = pr ( x+r-1Cr-1 ) qx
where x = 0,1,2, …
and p +q =1
Notice that this turns the binomial on its
head because instead of the number of
successes in n trials, it gives the
number of trials to r successes. This is
why it is called the negative binomial.
67
The binomial is the most important of
the discrete distributions in applications,
but you should have a passing
familiarity with the others.
Now we move on to distributions of
continuous random variables.
68
Because a continuous random variable has a
nondenumerable number of values, its
probability function is a density function. A
probability density function is abbreviated pdf.
There is a logical problem associated with
assigning probabilities to the infinity of points
on the x-axis and still having the density sum
to 1. So what we do is deal with intervals
instead of with points. Hence P(x=a) = 0
for any number a.
69
By far, the most important distribution
in statistics is the normal or Gaussian
distribution. Its formula is
1
f ( x)
e
2
( x )
2
2
2
70
The normal distribution is characterized
by only two parameters, its mean μ and
its standard deviation σ.
The mgf for a continuous distribution is
M x ( )
x
e
f ( x )dx
71
This mgf is of the same form as that for
discrete distributions shown earlier, and
it generates moments in the same
manner.
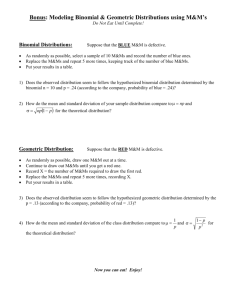
A normal distribution with μ = 1.5 and
σ = .9 is shown next.
72
No rmal distributio n ( 1 .5 , 0 .9 )
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0
0.5
1
1.5
2
2.5
3
rando m v ariable
73
This is the familiar bell curve. If the standard
deviation σ were smaller, the curve would be
tighter. And if σ were larger, the curve would
be flatter and more spread out.
Any normal distribution may be transformed
into the standard normal distribution with
μ = 0 and σ = 1. The transformation is
z = (x-μ) / σ
In this case, z is called the standard normal
variate or random variable.
74
If we use the transformed variable z, the
normal density becomes
1
f ( x)
e
2
1 2
z
2
75
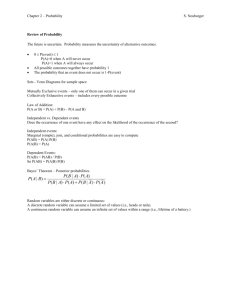
The area under the curve for any normal
distribution from μ to +1σ = .34 and the area
from μ to -1σ = .34. So from -1σ to +1σ is
68% of the area, which means that the values
of the random variable X falling between
those two limits use up .68 of the total
probability.
The area from μ to +1.96σ = .475 and
because the normal curve is symmetric, it is
the same from μ to -1.96σ. So from -1.96σ
to +1.96σ = 95% of the area under the curve,
and the values of the random variable in that
range use up .95 of the total probability.
76
Standard normal distribution
0.45
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
.34
.34
.135
.135
0.00
-3.0 -2.5 -2.0 -1.5 -1.0 -0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
random variable
77
The normal distribution is very important for
statisticians because it is a mathematically
manageable distribution with wide ranging
applicability, but it is also important on its own merits.
For one thing, many populations in various scientific
or natural fields have a normal distribution to a good
degree of approximation. To make inferences about
these populations, it is necessary to know the
distributions for various functions of the sample
observations.
The normal distribution may be used as an
approximation to the binomial for large n.
78
Theorem:
If X represents the number of
successes in n independent trials of an
event for which p is the probability of
success on a single trial, then the
variable (X-np)/√npq has a distribution
that approaches the normal distribution
with mean = 0 and variance = 1 as n
becomes increasingly large.
79
Corrollary:
The proportion of successes X/n will be
approximately normally distributed with
mean p and standard deviation √pq/n
if n is sufficiently large.
Consider the following illustration of the
normal approximation to the binomial.
80
In Mendelian genetics, certain crosses
of peas should give yellow and green
peas in a ratio of 3:1. In an experiment
that produced 224 peas, 176 turned out
to be yellow and only 48 were green.
The 224 peas may be considered 224
trials of a binomial experiment where
the probability of a yellow pea = ¾.
Given this, the average number of
yellow peas should be 224(3/4) =168
and σ =√224(3/4)(1/4) = 6.5.
81
Is the theory wrong? Or is the finding of 176
yellow peas just normal variation?
To save the laborious computation required
by the binomial, we can use the normal
approximation to get a region around the
mean of 168 which encompasses 95% of the
values that would be found in the normal
distribution.
168 1.96(6.5)
168 12.7
155 181
Since the 176 yellow peas found in this
experiment is within this interval, there is no
reason to reject Mendelian inheritance.
82
The normal distribution will be revisited later, but for now we’ll move on
to some other interesting continuous
distributions.
83
The first of these is the uniform or
rectangular distribution.
f(x) = 1/(β-α)
=0
α ≤X≤ β
elsewhere
This is an important distribution for
selecting random samples and
computers use it for this purpose.
84
Another important continuous distribution is
the gamma distribution, which is used for the
length of time it takes to do something or for
the time between events.
The gamma is a two-parameter family of
distributions, with α and β as the parameters.
Given β > 0 and α > -1, the gamma density
is:
1
α x/β
f ( x)
α 1 x e
!
85
Another important continuous distribution is
the beta distribution, which is used to model
proportions, such as the proportion of lead in
paint or the proportion of time that the FAX
machine is under repair.
This is a two-parameter family of distributions
with parameters α and β, which both must be
greater than -1. The beta density is:
β
( 1)! α
f ( x)
(
1
x
)
x
! !
86
The log normal distribution is another
interesting continuous distribution.
Let x be a random variable. If loge(x)
is normally distributed, then x has a log
normal distribution. The log normal has
two parameters, α and β, both of which
are greater than 0. For x > 0,
f ( x)
1
x
e
2
(1 / 2 β 2) (log x logα ) 2
87
As with the discrete distributions, most
of the continuous distributions are of
passing interest. Only the normal
distribution at this point is critically
important. You will come back to it
again and again in statistical study.
88
Now one kind of distribution we haven’t
covered so far is the cumulative distribution.
Whereas the distribution of the random
variable is denoted p(x) if it is discrete and
f(x) if it is continuous, the cumulative
distribution is denoted P(x) and F(x) for
discrete and continuous distributions,
respectively.
The cumulative distribution or cdf is the
probability that X ≤ Xc and thus it is the area
under the p(x) or f(x) function up to and
including the point Xc.
89
The most interesting cumulative distribution
function or cdf is the normal one, often
called the normal ogive.
Cumulative normal (1.5, .9)
1
0 .9
0 .8
0 .7
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
0
0
2
1
3
rando m v ariable
90
The points in a continuous cdf like the
normal F(x) are obtained by integrating
over the f(x) to the point in question.
F ( xc )
xc
f ( x)dx
91
The cdf can be used to find the
probability that a random variable
X is ≤ some value of interest because
the cdf gives probabilities directly.
In the normal distribution shown earlier
with μ = 1.5 and σ =0.9, the probability
that X ≤ 2 is given by the cdf as .71.
Also the probability that 1 ≤ x ≤ 2 is
given by F(2) – F(1) = .71 - .29 = .42.
92
Now you know from this normal cdf that
the probability that X ≤ 2 is .71.
Suppose you want the probability that
X ≥ 2. Well if P(X ≤ 2) = .71, then
P(X ≥ 2) = 1-.71= .29.
Note that you are ignoring the fact that
P(X = 2) is included is included in the
cdf probability because P(X = 2) = 0 in
a continuous pdf.
93
For the binomial distribution, a point on
the cumulative distribution function P(x)
is obtained by summing probabilities of
the p(x) up to the point in question.
Then P(xi)= p(x ≤ xi). In general,
P ( x j ) p( x i )
i j
94
Bino mial CDF with p =.5 and n=1 0
1 .1
1
pr obability X < Xc
0 .9
0 .8
0 .7
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
0
0
1
2
3
4
5
6
7
8
9
10
Number o f heads
95
From this cdf, we can see that the probability that the
number of heads will be ≤ 2 = .05.
And the probability that the number of heads will be
≤ 6 = .82.
But the probability that the number of heads will be
between two numbers is tricky here because the cdf
includes the probability of x, not just the values < x.
So if you want the probability that 2 ≤ x ≤ 6, you
need to use P(6)- P(1) because if you subtracted
P(2) from P(6), you would exclude the value 2 heads.
So P(2 ≤ x ≤ 6) = P(6) – P(1) = .82 -.01 = .81.
96
So if you are given a point on the binomial
cdf, say, (4, .38), then the probability that
X ≤ 4 = .38.
But suppose you want the probability that
X > 4. Then 1- P(X ≤ 4)
= 1-.38
= .62 is the answer.
But if you want the probability that X ≥ 4, you
can’t get it from the information given
because P(X = 4) is included in the binomial
cdf.
97
Now we have covered the major
distributions of interest. But so far,
we have been dealing with theoretical
distributions, where the unknown
parameters are given in Greek.
Since we don’t know the parameters,
we have to estimate them. This means
we have to develop empirical
distributions and estimate the
parameters.
98
To think about empirical distributions,
we must first consider the topic of
sampling.
We need a sample to develop the
empirical distribution, but the sample
must be selected randomly. Only
random samples are valid for statistical
use. If any other sample is used, say,
because it is conveniently available, the
information gained from it is useless
except to describe the sample itself.
99
Now how can you tell if a sample is
random? Can you tell by looking at the
data you got from your sample?
Does a random sample have to be
representative of the group from which
it was obtained?
The answer to these questions is a
resounding NO.
100
Now let’s develop what a random sample
really is.
First, there is a population with a variable of
interest. The population is all elements of
concern, for example, all males from age 18
to age 30 in Korea. Maybe the variable of
interest is height.
The population is always very large and often
infinite. Otherwise, we would just measure
the entire population on the variable of
interest and not bother with sampling.
101
Since we can never measure every
element (person, object, manufactured
part, etc.) in the population, we draw a
sample of these elements to measure
some variable of interest. This variable
is the random variable.
102
The sample may be taken from some portion
of the population, and not from the entire
population. The portion of the population
from which the sample is drawn is called the
sampling frame.
Maybe the sample was taken from males
between 18 and 30 in Seoul, not in all of
Korea. Then although Korea is the population
of interest, Seoul is the sampling frame. Any
conclusions reached from the Seoul sample
apply only to the set of 18 to 30 year-old
males in Seoul, not in all of Korea.
103
To show how far astray you can go when you
don’t pay attention to the sampling frame,
consider the US presidential election of 1948.
Harry Truman was running against Tom
Dewey. All the polling agencies were sure
Dewey would win and the morning paper after
the election carried the headline
DEWEY WINS
There is a famous picture of the victorious
Truman holding up the morning paper for all
to see.
104
How did the pollsters go so wrong? It was in
their sampling frame.
It turns out that they had used the phone
directories all over the US to select their
sample. But the phone directories all over
the US do not contain all the US voters. At
that time, many people didn’t have phones
and many others were unlisted.
This is a glaring and very famous example of
just how wrong you can be when you don’t
follow the sampling rules.
105
Now assuming you’ve got the right sampling frame,
the next requirement is a random sample. The
sample must be taken randomly for any conclusions
to be valid. All conclusions apply only to the
sampling frame, not to the entire population.
A random sample is one in which each and every
element in the sampling frame has an equal chance
of being selected for the sample.
This means that you can get some random samples
that are quite unrepresentative of the sampling frame.
But the larger the random sample is, the more
representative it tends to be.
106
Suppose you want to estimate the
height of males in Chicago between the
ages of 18 and 30.
If you were looking for a random
sample of size 12 in order to estimate
the height, you might end up with the
Chicago Bulls basketball team. This
sample of 12 is just as likely as any
other sample of 12 particular males.
But it certainly isn’t representative of the
height of Chicago young males.
107
But you must take a random sample to have
any justification for your conclusions.
Now the ONLY way you can know that a
sample is random is if it was selected by a
legitimate random sampling procedure.
Today, most random selections are done by
computer. But there are other methods, such
as drawing names out of a container if the
container was appropriately shaken.
108
The lottery in the US is done by putting a set
of numbered balls in a machine. The
machine stirs them up and selects 5
numbered balls, one at a time. These
numbers are the lottery winners.
Anyone who bought a lottery ticket which has
the same 5 numbers as were drawn will win
the lottery.
Because this equipment was designed as
lottery equipment, it is fair to say that the
sample of 5 balls drawn is a random sample.
109
Formally, in statistics, a random sample is
thought of as n independent and identically
distributed (iid) random variables, that is, x1,
x2, x3, …xn.
In this case, xi is the random variable from
which the ith value in the sample was obtained.
When we want to speak of a random sample,
we say: Let {xi} be a set of n iid random
variables.
110
Once you get the random sample, you
can get the distribution of the variable
of interest for the sample.
Then you can use the empirical sample
distribution to estimate the parameters
in the sampling frame, but not in the
entire population.
Most of what we estimate are the two
most important moments, μ and σ2.
111
Since we don’t know the theoretical mean μ
and variance σ2, we can estimate them from
our sample.
The mean estimate is X
n
X
x
i 1
i
n
where n is the sample size.
112
The estimate of the second moment, the
variance, is
n
s2
2
(
X
X
)
i 1
n 1
Although the variance is a measure of the
spread or variability of the distribution around
the mean, usually we take the square root of
the variance, the standard deviation, to get
the measure in the same scale as the mean.
The standard deviation is also a measure of
variability.
113
Now two questions arise. First, if we are
going to take the square root anyway, why
do we bother to square the estimate in the
first place?
The answer is simple if you look at the
formula carefully.
X
n
s2
i 1
X
2
i
n 1
114
Clearly, if you didn’t square the
deviations in the numerator, they would
always sum to 0, because the mean is
the value such that the deviations
around it always sum to 0.
X
i
X 0
i
115
Now for the second question. Why is it that
when we estimate the mean, we divide by n,
but when we estimate the variance, we divide
by n -1?
The answer is in the concept of degrees of
freedom.
When we estimate the mean, each value of x
is free to be whatever it is. Thus, there are
no constraints on any value of X so there are
n degrees of freedom because there are n
observations in the sample.
116
But when we estimate the variance, we use
the mean estimate in the formula. Once we
know the mean, which we must to compute
the variance, we lose one degree of freedom.
Suppose we have 5 observations and their
mean = 6. If the values 4, 5, 6, 7 are 4 of
these 5 observations, the 5th observation is
not free to be anything but 8.
So when we use the estimated mean in a
formula we always lose a degree of freedom.
117
In the formula for the variance, only n -1 of
the (Xi – X )2 points is free to vary. The nth
one is not free to vary. That’s why we divide
by n – 1.
One last point –
The sample mean and the sample variance
for normal distributions are independent of
one another.
118
Now let’s take a random sample of size 18 of
the height of Korean male students at KAIST.
Let’s say the height measurements are:
165,166,168,168,172,172,172,175,175,175,
175,178,178,178,182,182,184,185, all in cm.
Now the mean of these is 175 cm. The
standard deviation is 6 cm. And the
distribution is symmetric, as shown next.
119
Height of sample of 1 8 KAIS T male students
5
4
3
2
1
0
160
165
170
175
180
185
190
Height ( cm)
120
The distribution would be much closer
to normal if the sample were larger, but
with 18 observations, it still is
symmetric.
The median of the distribution is 175,
the same as the mean. The median is a
measure of central tendency such that
half of the observations fall below and
half above.
The mode of this distribution is also
175.
121
For normal distributions, the mean, median, and
mode are all equal. In fact for all unimodal
symmetric distributions, the mean, median, and
mode are all equal.
The mth percentile is the point below which is m% of
the observations. The 10th percentile is the point
below which are 10% of the observations. The 60th
percentile is the point below which are 60% of the
observations.
The 1st quartile is the point below which are 25% of
the observations. The 3rd quartile is the point below
which are 75% of the observations.
The median is the 50th percentile and the 2nd quartile.
122
This is our first empirical distribution.
We know its mean, its standard
deviation, and its general shape. The
estimates of the mean and standard
deviation are called statistics and are
shown in roman type.
Now assume that the sample that we
used was indeed a random sample of
male students at KAIST. Now we can
ask how good is our estimate of the
true mean of all KAIST male students.
123
In order to answer this question, assume that
you did this study -- selecting 18 male
students at KAIST and measuring their height
-- infinitely often. After each study, you
record the sample mean and variance.
Now you have infinitely many sample means
from samples of n = 18, and they must have
a distribution, with a mean and variance.
Note that now we are getting the distribution
of a statistic, not a fundamental measurement.
Distributions of statistics are called sampling
distributions.
124
So far, we have had theoretical
population distributions of the random
variable X and empirical sample
distributions of the random variable X.
Now we move into sampling
distributions, where the random variable
is not X but a function of X called a
statistic.
125
The first sampling distribution we will
consider is that of the sample mean so
we can see how good our estimate of
the population mean is.
Because we don’t really do the
experiment infinitely often, we just
imagine that it is possible to do so, we
need to know the distribution of the
sample mean.
126
This is where an amazing theorem comes to our rescue – the
Central Limit Theorem.
Let X be the mean and s2 the variance of a random sample of
size n from f(x). Now define
y
X
n
Then y is distributed normally with mean = 0 and variance =1
as n increases without bound.
Note that y here is just the standardized version of the
statistic X .
127
This theorem holds for means of
samples of any size n where f(x) is
normal.
But the really amazing thing is that it
also holds for means of any
distributional form of f(x) for large n. Of
course, the more the distribution differs
from normality, the larger n must be.
128
Now we’re back to our original question: How good
is our sample estimate of the mean of the population?
We know that
is distributed normally with mean μ
thanks to the CLT.
The standard deviation of
is
X
X
n
The standard deviation of is often called the
standard error because Xis an estimate of μ and any
variation of around μ isX error of estimate. By
contrast, theX standard deviation of X is just the
natural variation of X and is not error.
129
So now we can define a confidence interval
for our estimate of the mean.
X z
n
where zα is the standard normal deviate
which leaves .5α in each tail of the normal
distribution.
If zα = 1.96, then the confidence interval will
contain the parameter μ 95% of the time.
Hence, this is called a 95% confidence
interval and its two end points are called
confidence limits.
130
If σ is small, the interval will be very
tight, so the estimate is a precise one.
On the other hand, if σ is large, the
interval will be wide, so the estimate is
not so precise.
Now it is important to get the
interpretation of a confidence interval
clear. It does NOT mean that the
population mean μ has a 95%
probability of falling within the interval.
131
That would be tantamount to saying
that μ is a random variable that has a
probability function associated with it.
But μ is a parameter, not a random
variable, so its value is fixed. It is
unknown but fixed.
132
So the proper interpretation for a 95%
confidence interval is this. Imagine that you
have taken zillions (zillions means infinitely
often) of random samples of n =18 KAIST
male students and obtained the mean and
standard deviation of their height for each
sample.
Now imagine that you can form the 95%
confidence interval for each sample estimate
as we have done above. Then 95% of these
zillions of confidence intervals will contain the
parameter μ.
133
It may seem counter-intuitive to say that we
have 95% confidence that our 95%
confidence interval contains μ, but that there
is not 95% probability that μ falls in the
interval.
But if you understand the proper
interpretation, you can see the difference.
The idea is that 95% of the intervals formed
in this way will capture μ. This is why they
are called confidence intervals, not
probability intervals.
134
Now we can also form 99% confidence
intervals simply by changing the 1.96 in
the formula to 2.58. Of course, this will
widen the interval, but you will have
greater confidence.
90% confidence intervals can be
formed by using 1.65 in the formula.
This will narrow the interval, but you will
have less confidence.
135
But when we try to find a confidence interval,
we run into a problem. How can we find the
confidence interval when we don’t know the
parameter σ?
Of course, we could substitute the estimate s
for σ, but then our confidence statement
would be inexact, and especially so for small
samples.
The way out was shown by W.S. Gossett,
who wrote under the pseudonym “Student”.
His classic paper introducing the t distribution
has made him the founder of the modern
theory of exact statistical inference.
136
Student’s t is
t
X
s
n
t involves only one parameter μ and has
the t distribution with n -1 degrees of
freedom, which involves no unknown
parameters.
137
The t distribution is
f (t )
[( k 1) / 2]!
1
2
( k 1) / 2
k [( k 2) / 2]! [1 (t / k )]
where k is the only parameter and k = the
number of degrees of freedom.
Student’s t distribution is symmetric like the
normal but with higher and longer tails for
small k. The t distribution approaches the
normal as k → ∞, as can be seen in the t
table on the following page.
138
Table of t values for selected df and F(t)
F(t)
.75
.90
.95
.975
.99
.995
.9995
df
17
.689 1.333 1.740 2.110
2.567 2.898 9.965
30
.683 1.310 1.697 2.042
2.457 2.750 3.646
40
.681 1.303 1.684 2.021
2.423 2.704 3.551
60
.679 1.296 1.671 2.000
2.390 2.660 3.460
120
.677 1.289 1.658 1.980
2.358 2.617 3.373
∞
.674 1.282 1.645 1.960
2.326 2.576 3.291
139
Now we can solve the problem of computing
confidence intervals for the mean. This formula is
correct only if s is computed with n -1 in the
denominator.
X t
s
n
t is tabled so that its extreme points (to get 95%, 99%
confidence intervals, etc.) are given by t.975 and t.995,
respectively. There is also a tdist function in Excel
which gives the tail probability for any value.
140
In our sample of 18 KAIST males, the
estimated mean =175 cm and the
estimated standard deviation = 6 cm.
So our 95% confidence interval is
175 2.110 (6 / 18) or
(172 ≤ μ ≤ 178)
where 2.110 is the tabled value of t.975
for 17 df. This interval isn’t very tight
but then we had only 18 observations.
141
Technically, we always have to use the t
distribution for confidence intervals for the
mean, even for large samples, because the
value σ is always unknown.
But it turns out that when the sample size is
over 30, the t distribution and the normal
distribution give the same values within at
least two decimal points, that is, z.975 ≈ t.975
because the t distribution approaches the
normal distribution as df →∞.
142
What about the distribution of s2
the estimate of σ2?
The statistic s2 has a chi-square
distribution with n-1 df. Chi-square is
a new distribution for us, but it is the
distribution of the quantity
i 1
n
2
x
2
i
143
or if we convert to a standard normal
deviate, where
xi
y
then
n
2
i 1
i
y
has a chi-square distribution with n df.
So the sample variance has a chisquare distribution.
144
What about a confidence interval for s2? In our KAIST
sample, n = 18, s = 6, and s2 = 36. The formula for
the confidence interval is
ns 2
22
2
ns 2
12
(18)(36)
(18)(36)
2
30.2
7.56
21.5 2 85.7
This is a 95% confidence interval for σ2 and it is very
wide because we had only 18 observations. The two
χ2 values are those for .975 and .025 with n-1 =17 df.
Confidence intervals for variances are rarely of
interest.
145
Much more common is the problem of
comparing two variances where the two
random variables are of different orders of
magnitude.
For example, which is more variable, the
weight of elephants or the weight of mice?
Now we know that elephants have a very
large mean weight and mice have a very
small mean weight. But is their variability
around their mean very different?
146
The only way we can answer this is to
take their variability relative to their
average weight. To do so, we use the
standard deviation as the measure of
variability.
The quantity
s
X
is a measure of relative variability called
the coefficient of variation.
147
Now if you had a random sample of
elephant weights and a random sample
of mouse weights, you could compare
the coefficient of variation of elephant
weight with the coefficient of variation
of mouse weight and answer the
question.
148
What are the properties of an estimator
that make it good?
1. Unbiased
2. Consistent
3. Best unbiased
149
Let’s look at each of these in turn.
1. An unbiased estimator ˆ is one where
E( ˆ ) = θ
The sample mean is an unbiased estimator of μ
because
n
xi
E ( X ) E i 1
n
n
1
E ( xi )
n
i 1
and since E(X)≡μ and there are n E(X) in this sum,
we have
1
n
n
150
Is s2 an unbiased estimator of σ2?
2
1 n
E
xi X
n 1 i 1
2
1 n
E ( xi ) ( X )
n 1 i 1
n
1 n
2
2
E ( xi ) n( X ) 2 ( xi )( X )
n 1 i 1
i 1
1 n
2
2
2
E ( x i ) n( X ) 2 n( X )
n 1 i 1
1 n
2
2
E ( xi ) nE ( X )
n 1 i 1
1 n
2
2
E ( x i ) n X
n 1 i 1
2
1
2
n n
n
n 1
1
2
2
n
n 1
1
2
(n 1)
n 1
2
151
2. A consistent estimator is one for
which the estimator gets closer and
closer to the parameter value as n
increases without limit.
3. A best unbiased estimator, also
called a minimum variance unbiased
estimator, is one which is first of all
unbiased and has the minimum variance
among all unbiased estimators.
152
How can we get estimates of
parameters?
One way is the method of moments,
which comes from the moment
generating function.
Another very important way is the
method of maximum likelihood.
153
A maximum likelihood estimator (MLE)
of the parameter θ in the density
function f(X; θ) is an estimator that
maximizes the likelihood function
L(x1, x2, …,xn; Θ), where the xi are the
n sample values of X and θ is the
parameter to be estimated.
If the xi are treated as fixed, the
likelihood function becomes a function
of only θ.
154
In the discrete case, the likelihood function is
L({xi}; Θ) = p(x1;Θ)p(x2;Θ)…p(xn;Θ)
where p(x;Θ) is the frequency function for a
sample of n observations and the parameter
Θ.
L({xi}; Θ) gives the probability of obtaining
the particular sample values that were
obtained with the parameter Θ. The value of
Θ which maximizes this likelihood function is
called the maximum likelihood estimate (MLE)
of Θ.
155
In the continuous case, the likelihood
function
L({xi}; Θ) = f(x1;Θ)f(x2;Θ)…f(xn;Θ)
gives the probability density at the
sample point (x1, x2, …, xn) where the
sample space is thought of as being
n -dimensional.
Again, the value of Θ which maximizes
this likelihood function is called the
maximum likelihood estimate (MLE) of Θ.
156
Let’s look at an application of mean and
standard deviation estimates in manufacturing.
The approach is called Statistical Process
Control (SPC) and it was developed in the
1920’s by Walter Shewhart.
It became very popular after another
statistician, W. Edwards Deming, showed the
Japanese how to use it after WWII. Now it is
used everywhere in the developed world.
157
At that time (1950’s), everything that came to
America from Japan was cheap, but junk.
It sold for a while because it was so cheap,
but eventually, people caught on that it was
just junk so they stopped buying.
It was at this point that Deming went to
Japan.
158
The general practice in manufacturing during
Shewhart’s time was to run an assembly line
all day. Then at the end of the day, an
inspector inspected all the parts produced by
the process that day.
If a part was good, it was passed on to the
next step. If it was bad, it was either
discarded or reworked, at significant cost to
the business. Sometimes inspection did not
occur until the product was finished. Then if
a product did not meet specifications, the
entire product was discarded. Imagine the
cost in this case.
159
The idea of SPC is to get rid of all that waste
in materials and manpower by eliminating bad
parts as soon as the process starts to
produce them.
The problem was to find the point where the
parts started going bad, so you could stop
the process and fix the problem. Shewhart
was the one who solved this problem by SPC.
160
The idea is to examine periodically a few
(usually 3 or 5) parts produced by an
assembly line and determine if the
process is still running properly.
In any process, there is variation. If the
process is very good, the variation is
small. The natural variation of the
process is called system variation or
common variation.
161
After some preliminary running of the process
to determine its location and variation, a chart
is made with control limits on it.
M ean Chart
55
54
Mean
53
52
51
50
49
2
4
6
8
10
12
Time o f day
162
The control chart was developed for a process that
would select 5 parts every two hours.
The green line is the expected mean line that was
found in preliminary work.
The upper red line is called the upper control limit
(UCL) and the lower red line is called the lower
control limit (LCL). The control limits reflect the
system variation around the overall mean line. They
are usually 95% confidence limits.
Then the process is run.
163
M ean Chart
59
58
57
56
Mean
55
54
53
52
51
50
49
2
4
6
8
10
12
Time o f day
164
Each point on the SPC chart is the
mean of the measurement X on 5 parts.
As you can see, the points are staying
within the control limits (red) and
generally staying slightly above or below
the overall mean line (green) from 2 pm
to 10 pm.
At midnight, the point jumps out of
control to a value of 58. Variation like
this is called special cause variation.
165
This alerts the operator to a problem
with his process. His job is to stop the
process and find and fix the problem.
Now he knows the problem happened
between 10pm and 12 midnight
because everything was OK at 10 pm.
So he holds back the parts produced
between 10 and 12 for inspection to
make sure no bad part goes to the next
step.
166
Once he fixes the problem, the process
starts up again and the chart continues.
Now SPC has cut all the losses that
would have occurred between midnight
and 8 am, when the parts go to the next
step.
There is also a range chart or a
standard deviation chart to accompany
the mean chart, but that is another story.
167
When Deming told the story of his
experiences in Japan, he said,
“I told them that they could go from
being the junk manufacturer of the
world to producing the best quality
products in the world in five years if
they used the SPC system. But I made
a mistake. They did it in two years.”
168
This is an example of how useful
statistics can be in a manufacturing
setting.
Actually there are a number of
variations of control charts, and an
entire field of technology has developed
surrounding this idea.
169
Let’s look at linear functions of random
variables.
We know that E(X) = μ. But suppose
we are interested in a function of X, like,
say, aX, where a is a constant. Now
what is E(aX)?
Because E is a linear operator,
E(aX) = aE(X) = aμ.
170
This means that when we estimate the
mean of aX, we get aX .
How about the E(X + Y - Z) where X, Y, Z
are all random variables?
Again, because E is a linear operator,
E(X + Y - Z) = E(X) + E(Y) - E(Z)
So we can estimate the mean of the sum or
difference of random variables by the sum
or difference of their means.
171
What about the variance of functions of random
variables?
For aX, how is the variance affected? Let’s go to
the definition of variance.
X2 E ( X ) 2
Then
2
aX
E (aX a ) a E ( X )
2
2
2
172
So if we want to estimate the variance of aX,
we can simply multiply the estimated
variance of X by a2 to get a2s2 .
Now what about the variance of X + Y or of
X - Y, where X and Y are independent?
The variance of the sum or difference of
independent random variables is the sum of
the separate variances.
s
2
X Y
s
2
X Y
s s
2
X
2
Y
173
In general, the variance of X+Y where X
and Y are random variables, whether
independent or not, is
s
2
X Y
s s 2sX ,Y
2
X
2
Y
If X and Y are independent, the covariance
term sX,Y drops out.
174
Now what about the variance of the sum
or difference of two independent means?
The variances of X and Y are
X2
X2
2
Y
nX
Y2
nY
175
So the estimated variance of the
difference between the means of two
independent random variables is
s X2 Y
s X2 sY2
nX nY
The square root of this is the standard
deviation or standard error of the
difference between two independent
means.
176
So far we have been talking about
distributions of a single random variable.
But we now turn to distributions of
multiple random variables, which may or
may not be related to one another.
Let’s begin with the bivariate case.
Now we have two random variables,
X and Y, which have a joint normal
density.
177
For 1-dimensional random variables,
the distribution can be drawn on a
piece of paper, where the x-axis is the
variate and the y-axis is the ordinate of
the distribution.
For two random variables, one variate X
is on the x-axis, the other variate Y is
on the y-axis, and the ordinate is the
third dimension.
178
So now we imagine a bell sitting on a
table. One edge of the table is the
x-axis and the other edge is the y-axis.
The distribution is the bell itself, which
represents the ordinates for a set of (x,y)
points on the table.
179
This density is shown below, where the
only new parameter is ρ.
F ( x, y )
1
2 x y 1
2
e
2
2
x x y y y y
1 x x
2
2
x y y
2 (1 ) x
180
If both X and Y are in standard normal form,
their bivariate density simplifies as
F (z x , z y )
1
2 1
2
e
1
2
2
z
2
(
z
z
)
z
x
x y
y
2 (1 2 )
181
What is ρ?
ρ is measure of the relationship between
the two random variables X and Y. It is
called the correlation coefficient, where
-1 ≤ ρ ≤ +1
When ρ = 0, there is no relationship
between X and Y and thus
f(x,y) =f(x) f(y)
182
ρ is defined through the covariance of
X and Y. The covariance is a measure
of how the two variables X and Y vary
together. It is defined as
Cov(X,Y) ≡ σx,y ≡ E[(x-μx)(y-μy)]
and is estimated by
( xi X )( yi Y )
n
i 1
n
183
The correlation coefficient ρ is estimated
by r
n
r
(x
i 1
i
X )( yi Y )
ns x s y
and is thus a standardized version of
the covariance.
184
The correlation ρ is a measure of
the linear relationship of two
variables. There is no cause-effect
implication. The two variables
simply vary together.
Consider the following example
of the scores of 30 students on
a language test X and a science
test Y.
185
35
34
37
36
32
32
36
35
34
29
35
37
37
34
34
33
40
39
37
36
28
30
32
41
38
36
37
33
32
33
30
34
30
37
40
42
40
36
31
31
39
33
30
33
43
31
38
34
36
34
36
29
29
40
42
29
40
31
38
32
186
Scattergram of language and science scores
45
science score
40
35
30
25
25
30
35
language score
40
45
187
As the scattergram shows, there is a
tendency for the language and science
scores to vary together. The degree of
linear relationship is not perfect and
r = .66 for this situation.
Note that the relationship is a linear one
and the best fitting line can be drawn
through the points. If the relationship
had been perfect, r = 1 and all of the
points would fall on the line.
188
If the relationship had been negative,
then the line would have a negative
slope and r would be negative.
In general, r = 0 if the points show no
linear relationship at all. If the
relationship is perfect, then r = 1 or -1,
depending on whether the best-fitting
line through the points would have a
positive or negative slope.
189
For weak relationships, r is usually in
the .3 to .4 range. For moderate
relationships, r is usually in the .5 to .7
range. And for strong relationships, r is
usually about .8 to .95.
Of course, if the direction of the
relationship were negative, each r
above would be negative.
190
As another example, consider the following
data on the heights and weights of 12 college
students.
ht
63
72
70
68
66
69
74
70
63
72
wt
124 184 161 164 140 154 210 164 126 172 133 150
Are these two variables correlated?
look at the scattergram.
65
71
Let’s first
191
R elatio nship o f height and weight
220
200
W eight
180
160
140
120
100
60
65
70
75
Height
192
It certainly does appear that height and
weight are correlated. In fact, the
correlation coefficient r = .91.
But what if you found out that four of
the points were for college women and
the other eight for college men. Now
what would you conclude? Well, let’s
look at the scattergrams for men and
women separately.
193
R elatio nship o f height and weight fo r co llege men
R elatio nship o f height and weight fo r co llege wo men
220
220
200
200
180
W eight
W eight
180
160
140
160
140
120
120
100
60
65
70
Height
75
100
60
65
70
75
Height
194
Now it doesn’t seem that height and
weight are only moderately correlated.
The important thing to note here is that
degree of correlation can be strongly
enhanced by including extreme values.
In this case, the women were extremely
low both in height and weight,
compared to the men.
195
6
5
4
3
2
1
0
0
1
2
3
4
5
6
196
In the preceding scattergram, the
relationship is just about perfect, but
r = 0 because there is no linear
relationship.
There are ways to deal with measuring
the strength of nonlinear relationships,
but we will not deal with them here.
197
The correlation coefficient is used to
describe the linear relationship between
two random variables.
It is possible to use the relationship
between two variables, an independent
one X which is not a random variable
and the dependent one Y, which is a
random variable. In such a case, we
would be interested in predicting Y
from X.
198
In order to predict, we must have the
best-fit line. So how do we get the
best-fit line to a set of data? What
makes a line the best-fit line?
The answer is in the method of least
squares. The line of least-squares best
fit is the line for which
n
y y '
i 1
2
i
i
is minimized. Note that yi is the actual
point and yi’ is the point on the line of
best fit.
199
The least squares line of best fit is
y' a b( x X )
Then the intercept a is given by
aX
and the slope b is given by
n
b
(x
i 1
n
(x
i 1
X ) yi
i
i
X )2
200
A study of the effect of water irrigation on
hay yield produced the 7 observations which
are shown in the following table:
Water 12
Yield
18
24
30
36
42
48
5.27 5.68 6.25 7.21 8.02 8.71 8.42
201
From the formulas for a and b, the
best-fit line is shown as well. The
best-fit line is called the regression line.
The least-squares line of best fit is
y’ = .10 x + 4.0
This is the line that minimizes the sum
of squared errors.
202
Best fitting line fo r water-y ield data
9
8 .5
8
Yield
7 .5
7
6 .5
6
5 .5
5
10
20
30
40
50
water
203
What this means is that if we take the
vertical distance of each observed y
from the y’ predicted by the line, then
square it, and sum these squared
deviations for all points, we have the
sum of squared errors which was
minimized. In this case,
SS(error) = .667
No other line would have a smaller
SS(error). This is what makes the line a
least-squares best fit.
204
This line was obtained from only 7 points, so
we might question its utility. And the fact is
that if we were to do the study again, we
might get different points. A number of other
factors may have been involved in the hay
yield.
So should we trust the regression line or the
actual points? Because the relationship is
quite strong, we would tend to trust the line.
Of course, we might get a larger sample and
trust the line it generates.
205
What if you want to predict Y from a set
of the k variables X1, X2, X3, … , Xk?
The linear regression function now is
Y = βo + β1X1 + β2X2 + … + βkXk
and the task is to find the β’s that make
the best-fit equation.
206
This is expressed much more compactly
in the form
Y = Xβ
where Y is an n x1 vector of Y
observations,
X is an n xk matrix of observations on
the variables xi,
and β is a k x1vector of linear
coefficients.
207
Now finding each β is easy.
Y = Xβ
We simply premultiply both sides of the
equation with X΄ to get
X΄Y = X΄X β
Then premultiply both sides by (X΄X)-1 to
get
(X’X)-1X’Y = (X’X)-1X’X β
or
β = (X΄X)-1X΄Y
208
Of course, we have to estimate the β’s
from a sample of n observations, but if
n is large enough, the estimates are
pretty good. In fact, n must be much
greater than k for this to work.
Examples of multiple regression are not
easy because the computations,
especially of the matrix inverse, are
daunting. Computers are essential for
most applications.
209
Why do we say multiple regression
instead of multivariate regression?
The answer is because the X variables
are not random variables or random
variates. So if there several of them,
they are multiple, but not multivariate.
Now we get back to some multivariate
distributions.
210
What if you had many normal random
variables and not just two?
Suppose you have a p-dimensional
random variable denoted by a px1
random vector X = x
1
x2
x
3
.
.
.
xp
211
The random vector X is distributed as
1/ 2
R
1 / 2 ( X )' R ( X )
f ( X ) f ( x1 , x 2 ,..., x p )
e
p/2
(2 )
Where R is a positive definite symmetric matrix
whose elements rij are constants and
μ = a px1vector whose elements μi are constants.
212
The quantity
(X – μ)’R(X – μ)
is a quadratic form in the elements
xi – μi which can be written as
p
p
( x
j 1 i 1
i
i )( x j j )rij
Since the quadratic form is positive for
every nonzero vector (X- μ), the matrix
R is positive definite (symmetric).
213
You will deal with this multivariate
normal distribution extensively when you
take an advanced multivariate statistics
course.
214
Now consider a bivariate case for the
binomial distribution. In this case, the
joint distribution is called the
multinomial. Consider the multinomial
distribution in the bivariate case.
Let 4 balls be drawn from an urn which
contains 5 black balls, 6 white balls,
and 7 red balls. Let x = the number of
white balls drawn and let y = the
number of red balls drawn.
215
The distribution is
p( x, y)
6 C x 7 C y 5 C4 x y
18
C4
where 0 ≤ x+y ≤ 4
So we can determine the probability of
drawing, say, 2 white and 2 red balls.
This means that we draw 0 black balls.
216
Now we can determine the probability of this
joint event.
6 C 2 7 C 2 5 C 0
p( x 2, y 2)
18
C4
This means that we have
6! 7! 5!
2!4! 2!5! 0!5! 0.102941
18!
4!14!
217
So there is a better than 10% chance
that this event would happen.
We might have let z = the occurrence
of a black ball. But z = 4-x-y so z is
exactly determined by x and y and thus
z adds no new information.
Even if z had been included, it would
not have changed anything in the
calculation of the probabilities.
218
As another example, let’s say we still draw
4 balls from the urn with 5 black, 6 white,
and 7 red balls. But now we want the
probability of x=2 white, y=1 red, and z=1
black. Now the equation becomes
C
C
C
6 2 7 1 5 1
p( x 2, y 1, z 1)
C
18 4
219
which is
6! 7! 5!
2!4! 1!6! 1!4! 0.171569
18!
4!14!
220
So there is slightly over a 17% chance
of this selection.
You would expect this because there
are so many black balls that it is unlikely
that you wouldn’t draw at least one in
four tries.
221
Now what if there were 6 colors of balls
in the urn: red, white, black, green, blue,
and yellow.
If now we were to draw 8 balls from the
urn and wanted to know the probability
of 1 red, 1 white, 2 black, 3 green, and
1 blue, how would we treat this?
222
The multinomial distribution is associated with
repeated trials of an experiment with more
than two possible outcomes.
Suppose there are k possible outcomes, with
probabilities p1, p2, …, pk, where the sum of
the k probabilities =1.
Now suppose the experiment is repeated n
times. Let xi be the number of times the
outcome associated with pi occurs.
223
Then the multinomial function for the set of
random variables {xi} is
p( x1, x2 ,..., xk 1 )
k
n!
k
x !
p
xi
i
i 1
i
i 1
k
where xi = 0, 1, …, n;
x
i 1
i
n
224
This function involves only k-1 of the xi
because only k-1 of them are functionally
independent.
Note that functional independence is not
independence in the probability sense. All
functional independence means is that if
you know k-1 of the xi, you know the kth xi
because
k
x
i 1
i
n
225
Similarly, only k-1 of the pi are
functionally independent because
k
p
i 1
i
1
So on the RHS of the multinomial
function,
xk = n – x1 – x2 – x3 - … - xk-1
and
pk = 1- p1 - p2 - p3 - … - pk-1
226
The multinomial is a k-parameter family
of distributions, where the parameters
are
n, p1, p2, p3, …, pk-1
just as the binomial is a two-parameter
family of distributions with parameters
n and p.
227
Now let’s talk about marginal distributions.
For the sample of 60 people who are either
male or female and also who are either rich,
middle-class, or poor that we used before to
talk about marginal probability, now we seek
marginal distributions.
Status
Rich
Middle
-class
Poor
Gender
marginal
Gender
Male
3
28
3
34
Female
1
20
5
26
Status
marginal
4
48
8
60
228
This table shows the joint distribution of
Gender and Status in the center six
cells. The last row shows the marginal
distribution of Status and the last
column shows the marginal distribution
of Gender.
They are called marginal distributions
because they show the distribution of
one of the variables without respect to
the other variable.
229
So the marginal distribution of Gender is
Males
34/60
Females 26/60
and the marginal distribution of Status is
Rich
4/60
Middle-class 48/60
Poor
8/60
230
Let’s go back to our example of the urn with x = 6
white balls, y = 7 red balls, and z = 5 black balls
where n = 4 draws. The joint distribution of x and y
is
( 6 C x )( 7 C y )( 5 C 4 x y )
p( x , y )
18 C 4
In this example, the marginal distribution of x is
4 x
(6 C x )(12 C4 x )
p( x ) p ( x , y )
y 0
18 C 4
where the problem reduces to x = number of white
balls and y = 4-x the number of non-white balls in n
= 4 draws from the urn.
231
Similarly, the marginal distribution of y is
4 y
p( y) p( x, y)
x 0
(7 C y )(11C4 y )
18
C4
Again, the problem reduces to y = number of
red balls and x = 4-y the number of non-red
balls in n = 4 draws from the urn.
232
A marginal distribution is not
necessarily that of a single random
variable.
Consider the case of 12 cards drawn
from a fair deck without replacement
and let x1 = the number of aces, x2 =
the number of kings, x3 = the number of
queens, and x4 = the number of jacks.
233
The joint probability function is
p( x1 , x2 , x3 , x4 )
( 4 C x1 )( 4 C x2 )( 4 C x3 )( 4 C x4 )( 36 C12 x1 x2 x3 x4 )
C
52 12
There are several marginal distributions
here. For example,
p( x1 )
( 4 C x1 )( 48 C 12 x1 )
C
52 12
234
This is a single-variable marginal and
there are three others. But there are
also multiple-variable marginals, such
as
p( x 2 , x3 )
( 4 C x2 )( 4 C x3 )( 44 C12 x2 x3 )
52
C12
where the marginal of x2, x3 is the joint
distribution of x2, x3 without regard to x1
and x4. And there are others like this
one.
235
Let’s talk about conditional distributions. In
the urn problem with 6 white balls, 7 red balls,
and 5 black balls, recall that the joint
distribution of x and y is
p( x , y )
( 6 C x )( 7 C y )( 5 C 4 x y )
18
C4
and the marginal distributions for x (white
balls) and y (red balls) are
p( x )
(6 C x )(12 C 4 x )
18 C 4
p( y )
(7 C y )(11C4 y )
18
C4
236
Now, the conditional probability of x (white balls) given
y (non-white balls) is
p( x , y )
p( x | y )
p( y )
(6 C x )( 7 C y )( 5 C 4 x y)
18 C 4
(7 C y )(11C 4 y )
18 C 4
(6 C x )( 5 C 4 x y)
(11C 4 y )
where p(y) is the marginal distribution of y without
regard to x. Of course, p(x,y) is the joint distribution
of x and y.
237
Similarly the conditional distribution of y (red
balls) given x (non-red balls) is
p( x , y )
p( y | x )
p( x )
( 6 C x )( 7 C y )( 5 C 4 x y )
C4
( 6 C x )( 12 C 4 x )
18 C 4
18
( 7 C y )( 5 C 4 x y )
(12 C 4 x )
238