Magnetic Microactuators for Liver Collagen Removal MAE 268
advertisement

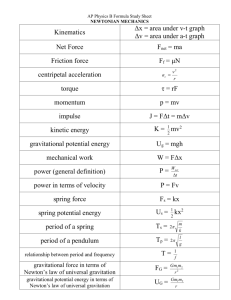
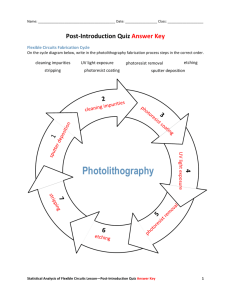
Magnetic Microactuators for Liver Collagen Removal MAE 268/MATS 254: MEMS Materials, Fabrication and Applications Professor Bandaru, Professor Jin, Professor Talke Shalini Ananda, Dor Y. Ashur Introduction Liver fibrosis: Excessive accumulation of collagen that occurs in most types of chronic liver diseases. Introduction Causes: - alcoholism - hepatitis B and C - fatty liver disease Risks: - Cirrhosis - liver failure - portal hypertension Size = 5 microns Current Cures: - liver transplantation, - Spread prevention through immune suppressants which endanger the body to infection and disease during recovery. Actuation Types Electrostatic Actuation •Electrostatic force clamps the flexure devices to an insulated ground plane •An off-chip magnetic field actuates unclamped devices. Magnetic Actuation •Coils around each device produce a magnetic force •A ferromagnetic core could also be integrated into the flexure, though fabrication is complicated Electro/magnetic Actuators A combination of both magnetic and electrostatic forces in would exploit the advantages of each actuation force Electrostatic forces: • Powerful over short distances and large areas • Consumes minimal power Magnetic forces • Powerful over longer distances • Can achieve large displacements both in and out of the plane of the wafer. Design • This design will employ a torsional flexure remove collagen scar tissue, to gain better leverage towards removing tissue. Fabrication Process 1 micron Magnetic Microactuators for MEMS Enabled Ventricular Cathers for Hydrocelpahus, Lee et al, IEE 1. Clean <100> mm wafer with HF 2. Pattern nitride with photoresist, nitride layer etched with advanced oxide etcher, plasma etch protective photoresist. 3. Second pattern photoresist, to expose areas for metal adhesion. Deposit metal with an e beam evaporator, and lift off to remove photoresist and metal. 4. Titanium is evaporated over the entire wafer to connect nickel and chrome seed layers. A thicker layer of photoresist is plated to define a mold for a nickel magnet. An HF dip removed the titanium at the base of the photoresist to expose nickel layer for electroplating. 5. Remove photoresist with, methanol, isopropanol and then water. Titanium layer is removed by dipping in HF solution. 6. Plate wafer in nickel solution and pass a current of 10mA/cm2 to seed layer for 25 minutes. Fabrication 1. To release the microactuators, a 1um thick silicon dioxide on the backside, and 6 microns of polyimide on the front side, serve as an etch stop for fast DRIE. 2. The backside is etched by downstream plasma etching. 3. The polyimide is removed by etching thrice consecutively in downstream plasma etching. The 100mm diameter substrate is then diced into 16 dies, each with a single array of 16 devices 4 Parylene C polymer is added to improve biocompatibility. Testing Procedure 1. Design a test apparatus to measure tensile strength of collagen. 2. Photograph tested collagen to study the effect of the cantilever on the cells 3. Expose new collagen to the micro actuators and measure the quantity and quality of interaction 4. Photograph tested collagen samples to assess homogeneity and efficacy - Homogeneity of collagen removal may have an effect on the potency of the treatment 4. Test the designed actuators in a cell simulated environment To tilt Testing the tensile strength of scar (collagen) tissue Laser interferometer Pitch of screw = 0.5mm Motor driven by 200steps /rev 400 steps/mm of displacement Biddulph et al , Meds Sci. Techno 5 (1994) 9-11 Force = weight of saddle x sine of angle of tilt. Sensitivity = 0.1micrometer Scar tissue can be simulated with cell culture techniques Cells will be grown over the actuator surface for different time spans to achieve varying levels of scar formation. www.medscape.com/liver_fibrosis Imaging actuation in a cellular environment Actuation at several frequencies around 50 Hz Images will be taken before and after actuation Images will be taken at time points: t= 0, 5, 10, 15, 20, 25 minutes. High resolution stereoscopic digital camera Future directions - Further miniaturization is needed for actual human use If the devices are scaled by a factor of s-1, then the magnetic torque and angular stiffness will scale by S-3. The scaled device will achieve the same angular deflection. - Further design of combined magnetic and electrostatic actuators could improve efficacy.