Conceptual Design Requirements
advertisement

VIRGINIA POLYTECHNIC INSTITUTE AND STATE UNIVERSITY
2007 – 2008 International
Design Project
Effect of “designing in” airworthiness and
reliability on the development of a small,
unmanned, flight vehicle for the large event
surveillance mission.
Belle Bredehoft
Robert Briggs
Amanda Chou
Richard Duelley
Alex Kovacic
Jessica McNeilus
Philip Pesce
Dennis Preus
Megan Prince
Anthony Ricciardi
Michael Sherman
Erik Sunday
12/6/2007
Table of Contents
List of Variables .............................................................................................................................. 7
Introduction ..................................................................................................................................... 9
Conceptual Design Requirements ................................................................................................. 10
Comparator UAVs ........................................................................................................................ 10
Comparator UAV Configurations ............................................................................................. 11
Conventional Tractor ............................................................................................................. 11
Flying Wing ........................................................................................................................... 12
Pylon-Mounted Propeller ...................................................................................................... 12
Twin-Tail-boom Pusher ......................................................................................................... 12
Comparator UAV Review ......................................................................................................... 13
Conceptual Analysis ..................................................................................................................... 13
Initial Overall Conceptual Designs ............................................................................................... 14
Max Gross Takeoff Weight (MGTOW).................................................................................... 14
Wing Sizing and Placement ...................................................................................................... 14
Power Required and Endurance ................................................................................................ 15
Deployable Landing Gear System............................................................................................. 15
Landing Techniques .................................................................................................................. 15
General Geometry ..................................................................................................................... 16
Conventional Design ............................................................................................................. 16
Twin Tail-Boom .................................................................................................................... 17
Pylon Mount .......................................................................................................................... 17
Tail-Mounted Pusher ............................................................................................................. 18
Concept Comparison ..................................................................................................................... 18
Decision Matrix ............................................................................................................................ 19
Group A Decision Matrix .......................................................................................................... 19
Group B Decision Matrix .......................................................................................................... 21
Reliability...................................................................................................................................... 23
Final Group Concepts ................................................................................................................... 25
Group A Final Concept ............................................................................................................. 25
Constraint Analysis ................................................................................................................... 26
Sizing......................................................................................................................................... 27
Wing ...................................................................................................................................... 27
Fuselage ................................................................................................................................. 28
2
Tail ......................................................................................................................................... 28
Performance Analysis ............................................................................................................... 28
Stall ........................................................................................................................................ 28
Power Required – Straight and Level .................................................................................... 29
Power Required – Climb ....................................................................................................... 29
Engine – Power Available ..................................................................................................... 29
Endurance .............................................................................................................................. 30
Glide Range ........................................................................................................................... 31
Turn Rate ............................................................................................................................... 31
Group B Final Concept ................................................................................................................. 33
Constraint Analysis ................................................................................................................... 34
Airfoil Selection ........................................................................................................................ 35
Tail Sizing ................................................................................................................................. 36
Engine Selection, Power Requirements, and Endurance .......................................................... 37
Starters and Alternators ......................................................................................................... 39
Stability ..................................................................................................................................... 40
Reliability Analysis ................................................................................................................... 41
Final Values............................................................................................................................... 42
Loughborough University Design Process ................................................................................... 43
Downselection............................................................................................................................... 45
Final Concept ................................................................................................................................ 47
Constraint Analysis ................................................................................................................... 47
Wing Sizing ............................................................................................................................... 48
Tail Sizing ................................................................................................................................. 49
Performance Analysis ............................................................................................................... 49
Constraint Analysis ................................................................................................................... 52
Conclusion................................................................................................................................. 53
Appendix A – List of Equations ................................................................................................... 56
Appendix B – Initial Concept Drawings ....................................................................................... 58
Concept A1 ............................................................................................................................ 58
Concept A2 ............................................................................................................................ 59
Concept A3 ............................................................................................................................ 60
Concept A4 ............................................................................................................................ 61
Concept A5 ............................................................................................................................ 62
3
Concept B1 ............................................................................................................................ 63
Concept B2 ............................................................................................................................ 64
Concept B3 ............................................................................................................................ 65
Concept B4 ............................................................................................................................ 66
Concept B5 ............................................................................................................................ 67
Appendix C – Decision Matrix Group A ...................................................................................... 68
Appendix D – Decision Matrix, Group B ..................................................................................... 71
Appendix E – Constraint Analysis Script ..................................................................................... 73
Appendix F – Endurance Script .................................................................................................... 74
Appendix G – Power Script .......................................................................................................... 75
Appendix H – Constraint Analysis Script ..................................................................................... 76
4
Table of Figures
Figure 1. Arcturus T-16XL and EMIT Blue Horizon 2 ................................................................ 11
Figure 2. Boeing/Insitu ScanEagle ............................................................................................... 12
Figure 3. The Orca Light Sport Amphibian .................................................................................. 12
Figure 4. AAI Pioneer UAV and AAI RQ-7 Shadow 200 ........................................................... 12
Figure 5. Viking 300 ...................................................................................................................... 13
Figure 6. Average Sources of System Failures For U.S. Military UA Fleet (Based on 194,000
hours)6 ........................................................................................................................................... 23
Figure 7. Constraint Analysis ....................................................................................................... 27
Figure 8. Power Available Plot for Various Altitudes .................................................................. 30
Figure 9. New Conceptual Design ................................................................................................ 32
Figure 10. Exploded View of New Concept ................................................................................. 33
Figure 11. Final Concept – Group B ............................................................................................. 34
Figure 12. Constraint Analysis Curves for Final Concept ............................................................ 35
Figure 13. Cruise Speed and Stall Speed vs. Time ....................................................................... 38
Figure 14. Power Required Curve with 15hp Available ............................................................... 38
Figure 15. AVL Geometry Plot .................................................................................................... 40
Figure 16. LU Conventional Concept ........................................................................................... 43
Figure 17. LU Pylon-Mounted Engine Concept ........................................................................... 44
Figure 18. Constraint Analysis for New Conceptual Design ........................................................ 48
Figure 19. Power Curves............................................................................................................... 51
Figure 20. Constraint Analysis for New Conceptual Design ........................................................ 53
Figure 21. Final Concept Drawing................................................................................................ 54
Figure 22. Final Concept 3-View.................................................................................................. 55
Table of Tables
Table 1. Comparator UAV Review .............................................................................................. 13
Table 2. Concept Comparison....................................................................................................... 18
Table 3. Summarized Decision Matrix – Group A ....................................................................... 20
Table 4. Summarized Final Decision Matrix – Group B .............................................................. 22
Table 5. Initial Empennage Sizing Parameters ............................................................................. 28
Table 6. Stall Speed versus Altitude ............................................................................................. 29
Table 7. Endurance at Cruise (3,000 ft, 50 kts) ............................................................................ 31
Table 8. Glide Range and Glide Speed versus Absolute Altitude ................................................ 31
Table 9. Airfoil Comparison ......................................................................................................... 35
Table 10. Results of Airfoil Ratings ............................................................................................. 36
Table 11. Initial Empennage Sizing Parameters ........................................................................... 37
Table 12. Engine Specifications for Engine Comparison ............................................................. 38
Table 13. Engine Selection Decision Matrix ................................................................................ 39
Table 14. Final Values for Group B Concept ............................................................................... 42
Table 15. LU Conventional Concept Sizing ................................................................................. 43
Table 16. LU Pylon-Mounted Concept Sizing ............................................................................. 44
Table 17. LU Final Concepts Advantages and Disadvantages ..................................................... 45
Table 18. Assumptions for Constraint Analysis ........................................................................... 47
5
Table 19. Wing Sizing Parameters................................................................................................ 48
Table 20. Initial Empennage Sizing Parameters ........................................................................... 49
Table 21. Assumptions for Performance Analysis ....................................................................... 49
Table 22. Stall Speed at Various Altitudes ................................................................................... 52
Table 23. Assumptions for Constraint Analysis ........................................................................... 52
6
List of Variables
Variable
Description
Units
AR
Aspect ratio
[-]
b
Wing span
[ft]
c
Average chord length
[ft]
CD
Coefficient of drag
[-]
CD0
Coefficient of base drag
[-]
C DMD
Coefficient of drag at minimum drag
[-]
C DMP
Coefficient of drag at minimum power
[-]
Cht
horizontal tail volume coefficient
[-]
CL
Coefficient of lift
[-]
C Lmax
Maximum lift coefficient = 1.3
[-]
CL/CD
Lift to drag ratio
[-]
Maximum lift to drag ratio
[-]
Lift to drag ratio at minimum power
[-]
CLMD
Coefficient of lift at minimum drag
[-]
C LM P
Coefficient of lift at minimum power
[-]
Cm
Moment coefficient
[-]
Cvt
Vertical tail volume coefficient
[-]
D
Drag on aircraft
CL / CD max
CL / CD MP
[lbs]
dh/dt
Rate of climb at constant speed
dV/dt
change in velocity with time (ft/s2)
e
Oswald efficiency factor = 0.9
E
Endurance
g
Acceleration due to gravity
γp
Weight specific fuel consumption
h
Altitude
L
Lift on aircraft
[ft/sec]
[ft/s2]
[-]
[sec], [hr]
[ft/sec2]
[lbs/hp-hr]
[ft]
[lbs]
L/D
Lift to drag ratio
[-]
Lht
horizontal tail moment arm
[ft]
Lvt
vertical tail moment arm
[ft]
MGTOW
Maximum gross takeoff weight
[lbs]
n
Load factor
[-]
ηp
Propeller efficiency
[-]
P
Engine power
[ft-lbs/s], [hp]
Power available from engine
[ft-lbs/s], [hp]
Pavail
7
Preq
Power required from engine
[ft-lbs/s], [hp]
Q
Dynamic pressure
[lbs/ft2]
R
Range
[ft], [nm]
Gliding range
[ft], [nm]
Rglide
Ρ
Ambient air density
[sl/ft3]
S
Wing planform area
[ft2]
Horizontal stabilizer surface area
[ft2]
Sht
Svt
Vertical stabilizer surface area
T
Thrust from engine
T/W
(T/W)SL
V
[lbs]
Thrust to weight ratio
[-]
Thrust to weight ratio at straight and level flight
[-]
Aircraft velocity
[ft/sec]
VMD
Aircraft velocity at minimum drag
[ft/sec]
VMP
Aircraft velocity at minimum power required
[ft/sec]
Vstall
Aircraft velocity at stall
[ft/sec]
W
Weight of aircraft
[lbs]
W1
Maximum gross takeoff weight
[lbs]
W2
Empty weight
[lbs]
W/S
Wing loading
[lbs/ft2]
Wing loading at stall
[lbs/ft2]
(W/S)stall
8
Introduction
In the modern world of aerospace engineering, an increasing emphasis on safety,
performance, and reliability has driven aircraft designers to develop a variety of autonomous
vehicles. Uninhabited autonomous vehicles (UAVs) have a larger performance envelope, such
as increased maneuverability previously limited by the g-forces able to be withstood by humans.
Likewise, the vehicle’s size can be greatly reduced, improving both efficiency and cost. Being
able to predict the vehicle’s timely and consistent response to instructions, as well as the
possibility of system or structural failures, the overall reliability of the vehicle can be monitored.
The International Design Team in the Aerospace Engineering departments at Virginia
Tech and Loughborough University has been tasked with the development of a UAV whose
purpose is flying surveillance cover over a crowd of interest.
The task objectives and
requirements have been developed by Naval Air Systems Command (NAVAIR), the Patuxent
River Naval Air Station in Maryland. Part of NAVAIR’s request is to not only develop an aerial
vehicle that can accomplish the primary objective of surveillance, but also to study the impact of
design on aircraft reliability.
Specific emphasis is placed upon cost drivers for improved
reliability and at what point does increasing the cost no longer significantly improve the overall
integrity of the vehicle. From this analysis, a better understanding of UAV reliability can be
obtained.
To start off the design process, comparator UAVs were researched in order to investigate
what configurations of aircraft were used to fulfill mission requirements. Each university group
involved with the project was then divided up into conceptual design groups. Each Aerospace
Engineering student on the team developed an individual conceptual design which met as many
of the design requirements as possible. The Industrial Systems Engineer on each Virginia Tech
team then created and executed a decision making process as to which design from the five
conceptual designs would be used as the team design. The two team designs from Virginia Tech
were presented along with the designs from Loughborough University. A decision was made as
to which design would be used for the remainder of the project, after which, both university
groups will work together to fully develop this design.
NAVAIR will sponsor this design project throughout the next two years and the two
corresponding design phases. The first year will focus on the conceptual design of the vehicle,
9
whereas the second year will focus on the construction and flight testing of the UAV prototype.
The scope of this report is focused on the first year of the program, conceptual design.
Conceptual Design Requirements
The objective of this project is to design and conduct prototype development of a
remotely piloted UAV that has the following requirements:
Cruise speed of 50 kt (knots)
Top Speed of 70 kt
Range of 15 nm (nautical miles)
Minimum endurance of eight hours
Service ceiling of 10,000 ft at half fuel
Normal operational altitude of 3000 ft or 2000 ft above ground level (AGL)
Minimum turn rate of 6 degrees per second
Climb rate of at least 200 ft/min at sea level
Maximum Gross Takeoff Weight (MGTOW) of 300 lbs
Minimum payload of 30 lbs (45 lbs desired)
Payload power source of 10 watts
Noise levels below 50 dBA at 200 ft.
All weather operation with a 10 kt crosswind landing capability
Capable of rail catapult pneumatic launch
Landing within a 50 ft x 250 ft parking lot
Less than one flight failure per 100,000 hours of flight
Additionally, the vehicle must be capable of GPS based autonomous operations with
dynamic re-tasking from ground controllers. In the event of lost communications between the
vehicle and the ground station, the vehicle must be capable of autonomous flying to a
predetermined location in an attempt to restore communications. Likewise, the vehicle must be
capable of gliding to a predetermined point in the event of an engine-out condition.
Comparator UAVs
In order to start the design process, several comparator UAVs were investigated for their
similarity to mission requirements. Two groups of existing UAVs were found: those that fit the
10
weight requirement and those that fit the speed or endurance requirement. Once the comparator
aircraft were identified, they were split between the two groups and their configuration was
noted. The configurations included conventional tractor, flying wing, pylon-mounted engine,
and twin-tail-boom pusher. From these observations, conceptual designs could be modeled after
these aircraft configurations to fit all of the design requirements.
It is apparent that some of the vehicles more closely match some of the design
requirements than others. The performance values that are similar to the design requirements are
underlined in the table. For example, the T-16 matched the desired airspeeds, whereas its weight
and payload are too low. Likewise, the Shadow’s MGTOW and payload weight are close to
desired while its airspeed range is not. The Viking 300 is the comparator UAV that most
resembles the design requirements in almost every category: speed, weight, endurance, payload.
Comparator UAV Configurations
Conventional Tractor
Figure 1. Arcturus T-16XL1 and EMIT Blue Horizon 2
The Arcturus T-16XL and EMIT Blue Horizon 2 (Figure 1) are two versions of a single
configuration that fit different requirements. The T-16XL matches the maximum and cruise
speeds and exceeds the endurance specified for the project. However, it carries a lighter payload
and has a smaller maximum gross takeoff weight. Specific characteristics of the T-16XL that
stand out are that it is also rail-launched and can be landed conventionally. The Blue Horizon
carries a heavier payload, weighs slightly more than the MGTOW and has greater endurance
than required, but has a much faster cruise and maximum speed.
11
Flying Wing
Figure 2. Boeing/Insitu ScanEagle2
The ScanEagle (Figure 2) is the only flying wing configuration and fits only the speed
and endurance requirements. Like the T-16XL, this aircraft is underweight and carries a much
lighter payload than specified. Interesting characteristics of the ScanEagle, however, include its
capture method, which involves capturing a shock cord on a pole. This alternate landing method
was investigated as a possibility to be used with some of the conceptual designs.
Pylon-Mounted Propeller
Figure 3. The Orca Light Sport Amphibian
The Orca (Figure 3) is the only pylon-mounted engine configuration and does not fit any
of the requirements listed in Table 1. However, the Orca was used as a comparator aircraft due
to the investigation of noise reduction. For this reason, the propeller is mounted in a duct above
the aircraft.
Twin-Tail-boom Pusher
Figure 4. AAI Pioneer UAV3 and AAI RQ-7 Shadow 2004
12
Most of the comparator UAVs investigated were twin-tail-boom pushers. The Pioneer
and Shadow 200 (Figure 4) both fit the weight and payload requirements but fall a little short for
the endurance and cruise at a much higher speed than is necessary. The Viking300, however, fits
all of the requirements listed in Table 1, showing that it is possible to make an aircraft in this
configuration fit the mission specifications.
Figure 5. Viking 300
Comparator UAV Review
Table 1 compares the requirements of the comparator UAVs in order to show the
differences in performance and structural characteristics. Elements of the existing designs were
used to create five conceptual designs that would fit the requirements as shown.
Table 1. Comparator UAV Review
Maximum
Cruise
Airframe
Speed
Speed
(knots)
(knots)
Minimum
Endurance
(hours)
Span
(ft)
Engine
(hp)
MGTOW
(lbs)
Dry
Weight
(lbs)
Payload
(lbs)
Required
70
50
8
---
---
300
---
45
T-16XL
80
50
16
13
2.5
80
40
20
Pioneer
---
64
5
16
26
450
---
---
Shadow
118
90
4
12.8
38
327
---
50
ScanEagle
70
50
20
10
1.5
37.9
---
13.2
Viking 300
70
56
8-10
16.5
22.5
318
210
30
Orca
Blue
Horizon 2
---
100
3.5
---
---
1430
120
70
16
21.3
---
397
81.6
Conceptual Analysis
A preliminary performance calculation was done on each concept by using a series of
equations found in Introduction to Aerodynamics & Aircraft Performance.5 First, a preliminary
wing area was found using the weight and speed set by the requirements (see Equation 1, in
Appendix A) where CL and V are for cruise condition. The rest of the wing geometry was found
13
using a desired aspect ratio (anywhere from 5 to 10), structural concerns, and transportability
concerns. With this geometry, a power required for cruise was calculated using Equation 2 and
Equation 3 where CD0 and e are estimated from common values. By estimating the amount of
fuel, two endurance numbers were found. Equation 4 is for a constant altitude flight and
Equation 5 is for a constant velocity flight where ηp and γp are estimated from common engines
and propellers. The glide performance was evaluated using the lift to drag ratio (see Equation 6.)
After these numbers were found, the designs were then optimized using what was learned from
the preliminary calculations. For all designs, the wing area, wingspan, and overall weight were
reduced. This resulted in a lighter and smaller aircraft with much of the same endurance and
performance numbers.
Initial Overall Conceptual Designs
Initially ten concepts were made by each aerospace engineering student on the team. All
concepts are shown in Appendix B.
Max Gross Takeoff Weight (MGTOW)
The requirements given by NAVAIR stated that the MGTOW was 300 lbs. After an indepth weight and mission analysis, it was determined that the mission could be completed with a
lighter aircraft. Many of the proposed concepts were sized using a MGTOW up to 100 lbs lighter
than the proposed requirement. This was done to achieve a more transportable aircraft.
Two of the proposed designs did have a MGTOW of 300 lbs. This was to assume a
worst-case scenario. If the final aircraft weighed 300 lbs, the performance of the aircraft still met
the requirements, however, building a lighter aircraft only increases the performance.
Wing Sizing and Placement
Wing sizing for the initial concepts was done by assuming a CLcruise and computing the
required wing area. By using this as a guide the wing span and chord were chosen to optimize
between transportability and a favorable aspect ratio. The concepts vary in wing planform shape
since each design is a balance between these two constraints.
Some wings incorporated taper to achieve a more elliptical lift distribution. The problem
with adding taper is that the complex planform shape makes manufacturing the wing more
difficult. Most of the concepts utilize a high wing for the added roll stability and to avoid the
need for dihedral. A low wing might need dihedral to achieve adequate roll stability, and this
14
complicates manufacturing the wing as well. This design does, however, make loading payloads
from the top of the aircraft more difficult.
Power Required and Endurance
After the wing size was chosen, the power required for normal flight and the required 200
ft/min climb rate was calculated. The power required varied between the concepts due to
different wing areas and aspect ratios. Nevertheless, the power for cruise for most concepts fell
between 3 and 7 horsepower. Most of the designs utilize a 10-15 hp engine to facilitate a high
climb rate at higher altitudes. Using this information and engines available in this range, a
specific fuel consumption was estimated for each design. Endurance calculations showed that
most of the designs have endurance between eight and twelve hours, meeting the minimum
requirement given by NAVAIR.
Deployable Landing Gear System
Several of the proposed concepts utilized a deployable landing gear system. This system
was utilized to provide a possible camera payload with a clear field of view and reduce the
overall drag of the aircraft. However, this system does reduce the reliability of the aircraft. To
address this, a one-time deployable landing gear system was used. This system would not utilize
any hydraulics or pneumatics, but would be retracted manually on the ground. When the aircraft
is preparing to land, a servo will release a pin and the landing gear will deploy using gravity
and/or a spring mechanism. This system is less reliable than a fixed landing gear, but is more
reliable than a actuated retractable system.
Landing Techniques
One requirement given by NAVAIR was that the aircraft have the ability to land in a 250’
x 50’ “parking lot”. The proposed concepts addressed this issue in several different ways. Some
of the concepts utilized a tail hook that would capture a cable stretched across the landing area.
This design is simple, but requires more structure to support the load on the tail hook and
requires the ground crew to set up the capture system.
One concept utilized a variable pitch propeller to produce a reverse thrust on landing.
This system seems to prove adequate for stopping the vehicle and it does not require additional
structure. In spite of this, the mechanism needed to implement this idea is complicated and
possibly unreliable.
15
Another concept utilizes a constant braking system. The problem with a conventional
braking system is that it requires a mechanism to actuate the brakes. In the constant braking
system, the brakes are already closed when the aircraft lands, making the system very simple.
This places a lot of stress on the system, however, and the landing gear and might make the
aircraft hard to control after touchdown.
The last idea proposed to meet the landing requirement was a parachute system. The
parachute would be activated over the intended landing area and the aircraft would glide down.
The parachute system would call for a very small landing area, but brings in the concern of
packing the parachute before a flight. Thus, the parachute was deemed a good backup system,
but not to be used for the primary landing method.
General Geometry
Since all the proposed concepts were inspired by comparator UAVs, many of the
concepts were similar. The ten proposed concepts were placed into four groups.
Conventional Design
Two of the proposed concepts were conventional designs (Concept A4 and B3 in
Appendix B). Both designs incorporated a single piece fuselage, conventional tail, and single
tractor engine. This design has several benefits. Using a tractor engine reduces the noise
generated by the propulsion system and the engine can be placed near the CG of the aircraft. This
allows the payload weight to be changed without the concern of shifting the CG of the aircraft.
This also protects the expensive payload from a nose first crash but leaves the less expensive
engine to be damaged in a crash. The simple fuselage structure will make manufacturing the
aircraft easier.
The use of a tractor engine does have the problem with possible contamination of the
sensors by exhaust. In addition the safety of the ground crew decreases with this design, because
unlike the two tail-boom designs the propeller is not protected from the crew. Both convention
designs also use a tricycle gear for improved ground handling and less structural loads in the tail
section of the aircraft.
One of the conventional design concepts also utilized winglets. These were incorporated
to increase the spanwise efficiency of the wing and also provide some thrust from the wingtip
16
vortices. However, the incorporation of winglets increases the amount of structure needed in the
wing.
Twin Tail-Boom
Most of the proposed concepts (Concepts A1, A3, A5, B2, and B5 in Appendix B) have a
twin tail-boom design with a pusher engine located near the center of the aircraft between the
two booms. The twin tail-boom design has the benefit of protecting the propeller from foreign
objects. Also, the pusher design should address the issue with exhaust interfering with the sensor
payloads, but could be louder than a tractor system. One main concern with this design is the
more complex tail structure being a weak point of the aircraft. This design protects the engine for
a crash; however, the payload might need to be placed farther forward to balance the aircraft and
thus be susceptible to damage in a crash.
Three of the concepts of this design incorporate an inverted V-tail. This tail was chosen
due to the lightweight structure and the ease of integration with the twin tail-boom design. The
V-Tail also has a slightly lower interference drag than a conventional tail. The other two
concepts use H-Tails. One with the horizontal between the tail-booms, the other with the
horizontal on the top of the verticals. This design allows for multiple rudders increasing
reliability. The structure could be heavier than a conventional or inverted V-tail, especially in the
case where the horizontal is mounted to the vertical tails.
Pylon Mount
One proposed concept is a pylon-mounted engine design (Concept A2 in Appendix B). In
this design, the engine is mounted above the fuselage in a shroud. This design is beneficial
because of the noise reduction in having the fuselage and wing between the engine and the
ground. This design also protects the propeller from debris better than any of the proposed
concepts. Since the engine is separate of the fuselage, volume is made available that would have
otherwise been used by the engine. This design might have thrust line issues from having the
propeller far away from the vertical CG and the structure for this design is more complicated,
thus harder to manufacture.
For this design, a T-tail was chosen to avoid blanketing the horizontal tail by the wing in
high angle of attack situations. The T-tail is, however, a more complicated structure than a
conventional tail.
17
Tail-Mounted Pusher
Two of the proposed concepts have a conventional fuselage with the engine mounted in
the tail section of the aircraft. This design prevents the sensors from being affected by the engine
exhaust and places the engine far away from any electrical equipment, reducing damage or
interference from vibration. This design could be significantly louder than other designs because
of increased aerodynamic interference with the pusher propeller at the tail. The propeller is also
placed in a position that could easily be damaged on landing. Placing the engine in the tail also
increases the structure needed in the tail section of the aircraft and makes balancing the aircraft
more difficult.
Both of the designs of this type utilized Y-tails. The “V” part of the tail was chosen to
reduce the weight and drag of the tail. The vertical part of the Y-tail was incorporated because it
protects the propeller from a ground strike and adds the ability to have a redundant rudder for
yaw control.
Concept Comparison
Most of the concepts were comparable in size, differing only slightly in wingspan and
weight. As a result, the power required for cruise was roughly the same for each of the aircraft at
an average of about 3.5 hp. Other physical characteristics and performance of each concept are
compared in Table 2.
Table 2. Concept Comparison
Wing
Span (ft)
Wing
Area
(ft^2)
MGTOW
(lbs)
Empty
Weight
(lbs)
Endurance
(hr)
(L/D)max
Concept A1
20
55
300
230
10-14
16.03
Concept A2
20.6
85
250
228
8.55
13.29
Concept A3
19.3
53.6
300
225
9-11
15.7
Concept A4
12.7
20.2
132
67
8.5
11.5
Concept A5
20
65
205
160
8-10
18
Concept B1
20
74
175
140
10
10.63
Concept B2
15
45
175
150
8-9
10.23
Concept B3
16
50
200
150
16.7 - 17.7
10.36
Concept B4
15
45
175
150
8-9
10.23
Concept B5
16
40
200
160
9-10
11.6
18
Decision Matrix
To narrow down ten conceptual designs between the two groups into two concepts, each
group created a decision matrix consisting of key aspects to take into account that each particular
group deemed important for design. Both teams used a scale of 1 to 5 to score each concept,
with 1 being the worst, and 5 being the best. Each person within the teams then rated each
concept, including their own, based on the categories within each decision matrix. The process
for both teams is outlined within the following sections.
Group A Decision Matrix
To analyze the five conceptual designs from Group A, a decision matrix was created
consisting of key aspects to take into account (see a summarized version in Table 3 below).
There are eight main categories:
wing
performance
tail
payload
propulsion
fuselage
landing gear
overall design
The tail category includes both a division for the vertical stabilizer and a horizontal
stabilizer. The overall category is a general category designed to identify areas that are not
associated with a particular aspect of the vehicle, such as storage and portability. Each main
category has been divided into several sub-categories such as: reliability, structural implications,
or ease of manufacture.
In order to determine appropriate “scores” for the individual conceptual designs, several
steps were taken to assure a fair score. All sub-category weights add up to be 100 under each
main category. After each sub-category had been rated, the score was multiplied by the
respective weight to get a weighted score. These were then subtotaled for each main category
and then multiplied by the category weight. After each subtotal was multiplied by the category
weight, these scores were totaled for a total concept design score. The design with the highest
score was deemed to be the most appropriate choice to continue with. A table showing a
comparison of basic aircraft performance and parameters for each individual concept (see
Appendix C) was used to help make the ratings within the decision matrix. As can be seen,
concept design A1 “won” the decision matrix. However, the group decided to merge some of the
19
best components from each concept to come up with a new conceptual design to create an
optimal aircraft.
Wing
Table 3. Summarized Decision Matrix – Group A
Concept Designs
concept
concept
A3 score
A4 score
concept
A1 score
concept
A2 score
285.0
255.0
276.0
291.0
284.0
0.175
49.9
44.6
48.3
50.9
49.7
SUBTOTAL
330.0
289.5
313.0
350.0
304.0
16.5
14.5
15.7
17.5
15.2
336.0
277.0
330.0
347.0
308.0
0.05
16.8
13.9
16.5
17.4
15.4
SUBTOTAL
299.0
234.0
257.0
227.0
256.0
29.9
23.4
25.7
22.7
25.6
255.0
239.5
261.0
280.0
271.0
51.0
47.9
52.2
56.0
54.2
286.0
254.0
258.0
233.0
269.0
28.6
25.4
25.8
23.3
26.9
356.0
309.5
343.0
356.0
338.0
0.175
62.3
54.2
60.0
62.3
59.2
SUBTOTAL
330.0
300.0
380.0
260.0
360.0
0.05
16.5
15.0
19.0
13.0
18.0
SUBTOTAL
326.0
277.5
308.0
356.0
321.5
32.6
27.8
30.8
35.6
32.2
304.1
266.6
294.0
298.7
296.3
SUBTOTAL
CATEGORY
WEIGHT
concept
A5 score
Tail
Vertical Stabilizer
CATEGORY
WEIGHT
0.05
Horizontal Stabilizer
SUBTOTAL
Overall
Payload
Performance
Landing
Gear
Propulsion
Fuselage
CATEGORY
WEIGHT
CATEGORY
WEIGHT
0.1
SUBTOTAL
CATEGORY
WEIGHT
0.2
SUBTOTAL
CATEGORY
WEIGHT
0.1
SUBTOTAL
CATEGORY
WEIGHT
CATEGORY
WEIGHT
CATEGORY
WEIGHT
Total Score
0.1
20
Group B Decision Matrix
A decision matrix (Appendix D) was used to narrow down the initial five concepts from
Group B into one final concept. The categories of the decision matrix were as follows:
wing
conformity to requirements
tail
reliability
fuselage
human factors
propulsion
overall aircraft
This allowed for the option of not only one concept design to be selected, but a
combination of the concepts depending on the scoring in the categories. These categories were
weighted out of 1.0. Reliability was weighted the heaviest, at 0.3, because it is the main focus of
this design project. Conformity to requirements was the next highest weight to make sure that
the concepts fit all the requirements of the mission.
Listed in each category are the scored and weighted components. Most of these are
typical or self-explanatory concerns for each aircraft component. For instance, the wing and tail
both have aerodynamic efficiency, impact on stability/control, ease of manufacturing (also seen
in fuselage) and integration with fuselage. All categories, except reliability and human factor,
have some component that deals with weight. Some of the components specific to reliability
require further explanation. The glide component in the reliability category is a replacement for
the reliability of the propulsion system. This was done because none of the concepts have a
known propulsion system at this time. The propulsion system, however, is one of the main
concerns for reliability since it is the most likely place for failure. To overcome this hurdle, the
glide characteristics were analyzed to see how well the concept could glide to safety should the
propulsion system fail. The control surface (malfunction) component was used to evaluate how
the system would respond to a control actuator failure. These servos are another point of failure.
In the overall aircraft category, the transportability component is used to describe the ease of
moving the proposed concepts on the ground. The components in each section were weighted
out of a total of 1.0 based on their importance.
A summary of the final decision matrix is shown in Table 4. This matrix was examined
by the team to make sure there were no arguments and a final concept was selected.
21
Table 4. Summarized Final Decision Matrix – Group B
Wing
SUBTOTAL
CATEGORY
WEIGHT
0.1
concept
B2 score
concept
B5 score
3.5585
3.7
3.5145
3.6815
3.397
0.35585
0.37
0.35145
0.36815
0.3397
3.2675
3.9215
3.957
3.2745
3.7005
0.32675
0.39215
0.3957
0.32745
0.37005
3.312
3.7715
3.5175
3.4925
3.5445
0.3312
0.37715
0.35175
0.34925
0.35445
2.662
3.6425
4.261
3.3125
3.3745
0.2662
0.36425
0.4261
0.33125
0.33745
3.7625
3.505
3.7685
3.4495
3.4345
0.564375
0.3505
0.37685
0.34495
0.34345
3.899
3.491
3.824
3.59
3.504
1.1697
1.0473
1.1472
1.077
1.0512
3.865
4.515
4.325
3.955
4.805
0.19325
0.22575
0.21625
0.19775
0.24025
3.517
3.825
3.619
3.649
3.6065
0.3517
0.3825
0.3619
0.3649
0.36065
3.559025
3.5096
3.6272
3.3607
3.3972
Tail
SUBTOTAL
Concept Designs
concept
concept
B3 score
B4 score
concept
B1 score
Overall Aircraft Human Factor
Reliability
Conformity to
Requirements
Propulsion
Fuselage
CATEGORY
WEIGHT
0.1
SUBTOTAL
CATEGORY
WEIGHT
0.1
SUBTOTAL
CATEGORY
WEIGHT
0.1
SUBTOTAL
CATEGORY
WEIGHT
0.15
SUBTOTAL
CATEGORY
WEIGHT
0.3
SUBTOTAL
CATEGORY
WEIGHT
0.05
SUBTOTAL
CATEGORY
WEIGHT
TOTAL SCORE
0.1
22
Reliability
According to the Department of Defense UAS Roadmap6, reliability is the “core of …
reducing acquisition system cost and improving mission effectiveness for [UAV’s].” The
document goes on to state that reliability underlies the “affordability, availability, and
acceptance” of UAVs. In terms of affordability, an unmanned vehicle should be less expensive to
operate and maintain than a vehicle which is manned. By eliminating the cockpit, the average
savings in terms of weight ranges from 3,000 to 5,000 lbs. However, any further means to reduce
the costs and improve affordability tend to have a negative impact on the reliability of the
aircraft. Another aspect to carefully consider is the availability of the aircraft. By including
redundant systems in the vehicle, the reliability tends to increase, as does the cost.6
Clearly, reliability plays an essential role in designing an aircraft. By considering
dependability issues from the beginning stages of the design process, costs to correct faults can
be reduced. Important aspects to consider include the performance of the vehicle, the payload,
and propulsion methods. Uncontrollable conditions such as weather related problems, for
example icing or high winds, also pose a threat to the overall dependability of the system.
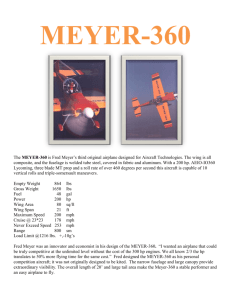
As can be seen in Figure 6, the number one source of failure in military unmanned
aircraft is related to the power and propulsion systems. Flight control, communication problems,
and human error are also listed as sources for system failures.
Figure 6. Average Sources of System Failures For U.S. Military UA Fleet (Based on 194,000 hours)6
During the design process careful attention must be paid to the maintenance procedures
for the aircraft. It would be beneficial to minimize the number of tools required for maintenance
and make sure these functions can be accessible from the ground (versus on a lift.) Also, the
material used for construction should be able to withstand corrosion. It is essential to create a
design which is “Jack-proof,” or simple enough that the average person would be able to
understand and use it.
With respect to overall aircraft structure, reliability considerations were taken into
account in each conceptual design. Aspects of each aircraft were designed based on vehicles
23
already in use. Taking the characteristics and reliability issues of past aircraft in account, aircraft
structure and form were designed to the desired specifications of each student.
The task of achieving the desired reliability of this aircraft is not an easy one. Aside from
specific concerns stated in each conceptual design, the considerations that must be taken into
account consist of the following:
engine reliability
navigation system (including autopilot and/or GPS)
servos for flight control
communication between the ground controllers and the aircraft
structural integrity of the aircraft
Once all of these considerations are accounted for, it must be realized that ultimately, the
reliability of the aircraft will be measured by the conformity to the proposed requirements of the
design.
Therefore, the performance of the aircraft will be the ultimate determinant of its
reliability.
There are many tools and statistical models available for use in this project. For example,
“time until failure” distributions are historically a great choice to use as models, especially for
electrical components. The general form of this distribution function can be seen in Equation 16.
This function analyzes the probability P that the working condition of the component is less-than
or equal-to time t.7 This is a very basic, fundamental summary of the distribution function that
can be modeled into a specific continuous distribution. From this summarized function, other
functions such as failure rate can be constructed given the same data. To find this distribution
for a component, a sample of data must be collected and analyzed to find the distribution that
best fits the data. The main concern with this type of modeling at this point is data gathering.
One way that data can be gathered is from the production company of each proposed
component of the aircraft. However, this is very unlikely to be obtainable considering the
confidentiality and probable lack of knowledge of the manufacturers of the component. A more
tangible but tedious task would be to experiment with the actual components enough to obtain a
reasonable sample of data to consider it for real results.
However practical it may seem to collect component data, this is an unlikely approach
considering construction of the aircraft will not occur this year. A more feasible approach is to
24
model a current, similar aircraft, or components based on historical events. This will allow the
team to obtain a “ballpark” measurement of the conceptual design’s components.
Final Group Concepts
Group A Final Concept
After the decision matrix results, the group came up with a design that would combine
the best of all the individual concepts and meet the design objectives, as seen in Figure 9. The
design consists of:
high wing
H-tail
shrouded pusher propeller
twin tail-booms
tricycle landing gear
The shroud around the propeller serves two purposes: increasing the efficiency of the
propeller and significantly reducing the noise level to meet the noise requirement. Placing the
motor at the aft of the fuselage decreases the likelihood of engine damage in a crash situation.
Likewise, exhaust from a rear-mounted engine will be deposited into the airflow downstream of
the payload sensors, thus avoiding any form of contamination on the payload. The engine of
choice for this aircraft is the Desert Aircraft DA-150, outputting 16.5 hp at maximum RPM.
This engine provides more power than necessary to meet the design speeds, cruising altitudes,
and climb rate, thus improving the safety margin for flight operations.
The engine fuel
consumption allows for an endurance of over 10 hours with only 25 lbs of fuel.
The payload will be located in the middle of the fuselage to protect it in a crash. Keeping
the most expensive parts of the aircraft away from the nose increases the reliability by avoiding
unnecessary maintenance and replacement costs. The payload sensors will be mounted on a
generic removable cartridge, allowing for easy exchange of payload for a variety of missions.
The high wing configuration was chosen to improve the roll stability of the aircraft, while
increasing the visibility of the payload. As mentioned above, the wing area was calculated to be
66 ft2 from constraint and performance equations to provide optimum performance at slow cruise
speeds. Likewise, an aspect ratio of about 7 was chosen to improve the wing’s ability to glide
without power and decrease its induced drag. This value was chosen such that the wing’s
25
dimensions would support the stresses during a pneumatic launch, obtain the best performances
during flight, and provide enough volume for the fuel needed. The wing was tapered to create
more of an elliptic lift distribution. A Clark Y airfoil was chosen for ease of construction due to
its flat lower surface, which also reduces the complexities of mounting it to the fuselage. The
Clark Y airfoil provides good performance characteristics in addition to its simplistic design.
The dual-boom mounted tail allows the mounting of the horizontal and vertical stabilizers
with an aft-mounted propulsion system. The two booms allow for an H-tail configuration,
providing increased reliability from multiple control surfaces. Additionally, the H-tail provides
adequate propeller clearance during ground operation.
A non-retractable tricycle landing gear system was chosen to decrease the risk of having
a mechanical malfunction. The main gear is placed behind the payload for increased sensor
visibility and propeller clearance. They also provide a wide enough base to reduce the risk of
wingtip strike during landing and rollout. The main gear is mounted to the fuselage to avoid
placing additional stresses and vibrations on the wing during ground operations. For landing and
stopping purposes, the main gear will utilize a constant applied breaking system. At touchdown,
the wheels will apply breaking forces for the aircraft to eliminate a separate break control
system. This increases reliability by reducing the number of systems.
For ease of ground transportation, the aircraft was designed to break apart and fit on the
roof of a truck. The wing breaks apart into three sections and fits together by sliding the wing
spars of adjacent sections into sleeves and then locking them with pins. The assembled wing
then locks into place on top of the fuselage. The dual booms and tail section slide into sleeves on
the aft side of the wing and lock in place with pins. This breakdown allows for any one damaged
component to be replaced without having to replace or repair the entire aircraft.
Constraint Analysis
Since maximum gross takeoff weight (MGTOW) is specified as 300 lbs in the
requirements, the necessary wing area can be determined (see Equation 1 in Appendix A.) To
move forward with the constraint analysis an Oswald efficiency factor of 0.9 and aspect ratio of
7 were assumed.
The values above are constant for all phases of flight except n,
according to the stage of the mission.
26
𝑑ℎ
𝑑𝑡
𝑑𝑉
, 𝑎𝑛𝑑 𝑑𝑡 will vary
For Figure 7, landing, stall, climb, and turn rate are plotted. Straight and level flight is
omitted from these plots because
𝑇
𝑊
and
𝑊
𝑆
required for straight and level flight will always be
less demanding than those of other conditions.
Figure 7. Constraint Analysis
The optimum design point was chosen as the point that would allow the lowest possible
𝑙𝑏
wing area and thrust required. The wing loading at this design point is 4.475𝑓𝑡 2. At 300 lbs, this
demands a wing area of about 66 ft2. The
𝑇
𝑊
is about 0.11, resulting in a thrust required of 33
lbs at MGTOW.
Sizing
Wing
The aspect ratio for the design was chosen through careful analysis of the decision matrix
results from the five individual concepts. As the winning concept had an aspect ratio of 7.27, it
was deemed that with a MGTOW of 300 lbs, an aspect ratio of 7 would generate the best
performance results. This aspect ratio was verified through an iterative process between aircraft
27
performance and sizing. This fixed the wing area at 66 ft2, the span at 22 ft, and the mean
average chord at 3 ft. To create a more elliptic lift distribution, the wing also had a taper ratio of.
0.8
Fuselage
Using statistical equations for fuselage length developed by Raymer based on MGTOW,
the length can be calculated with Equation 15 from Appendix A. The variables A and C are
coefficients and Wo is the takeoff gross weight. Using a sailplane for estimation, A and C are
estimated to be 0.71 and 0.48 respectively, giving a fuselage length of 11 ft. To improve the
stability, the fuselage was lengthened by 1 ft to give the needed moment arm length.
Tail
To calculate the tail size, the moment arm and tail coefficients (cVT and cHT ), must be
estimated. Using typical values quoted by Raymer for a sailplane, cVT and cHT are approximated
as 0.50 and 0.03 respectively. The moment arm can be estimated at the conceptual design phase
as a percentage of the fuselage length. With the engine configuration of a pusher prop mounted
at the end of the fuselage, the tail arm is about 60% of the fuselage length, giving a moment arm
of 6.6 ft.8 The tail aspect ratio was chosen to be two thirds of the wing’s, giving an aspect ratio
of 4.67.9 The results of the initial sizing calculations are shown in Table 5.
Table 5. Initial Empennage Sizing Parameters
Horizontal Tail
Vertical Tail
Area
15.0 ft.²
6.6 ft.²
Span
8.37 ft.
5.55 ft.
Mean Chord
1.79 ft.
1.19 ft.
Volume Coefficient
0.50
0.03
Performance Analysis
Stall
The normal operating cruise speed of the vehicle is 50 kts at an altitude of 3000 ft.
Compared to other UAVs in the same weight category, this cruise speed is slow. One of the
design goals with this vehicle is to prevent the stall speed from occurring near the normal
operating cruise speed. By placing a large enough gap between the cruise speed and the stall
speed, the safety and reliability of the aircraft can be increased.
28
From the constraint analysis and sizing of the aircraft in the previous sections, the
planform area of the vehicle is 66 ft2 when operating at 300 lbs. Considering altitudes of 0,
3,000, and 10,000 ft above sea-level (ASL), the plane stalls at the following speeds:
Table 6. Stall Speed versus Altitude
Altitude above Sea-Level [ft]
Stall Speed (True airspeed) [kts]
0
32
3,000
34
10,000
37
At a cruising altitude of 3,000 ft, the buffer velocity is roughly 16 kts. The worst case
scenario for stall speed occurs at 10,000 ft but still provides a 13 kts buffer velocity.
Power Required – Straight and Level
Using Equation 2 from Appendix A, the power required to maintain straight and level flight
is found and can be plotted for different altitudes. In these calculations, it is assumed the aircraft
is operating at MGTOW; the altitudes range from sea-level to 10,000 ft. The following plot
depicts the power required curves for the different altitudes.
The plot reveals that a cruise speed of 50 kts would require slightly less than 3 hp to
maintain straight and level flight. The power required at cruise does not change much with
altitude; this is because the cruise speed is also the speed at which minimum drag occurs. A
cruise speed of 50 kts is thus optimal for maximum endurance.
Power Required – Climb
The power required to maintain a 200 ft/min climb rate can be calculated using Equation
11 from Appendix A, assuming constant velocity. The power required to climb at 50 kts at any
altitude is roughly 4.7 hp, while to climb at 70 kts at sea-level is roughly 7.4 hp (see Figure 8
below). The power required at climb is the maximum power required to climb condition in the
aircraft’s normal operating region.
Engine – Power Available
From the power required data, an engine can be chosen that meets the power
requirements. The assumed drag coefficient, 𝐶𝐷0 = 0.02, may be lower than the actual value, so it
is safer to choose an engine that outputs more power than calculated. In this case, the maximum
power needed comes from the maximum power required for climb at sea-level, 7.4 hp. One
29
ideal engine for this aircraft is the Desert Aircraft DA-150, outputting a total of 16.5 hp at 8,500
RPM. At 6,000 RPM, the engine uses 3.3 oz/min of fuel.
Extra power can be used to exceed the performance requirements, such as increasing
maximum speed or ceiling altitude. Plotting the power available (Equation 8 of Appendix A), on
top of the power required curves results in the Figure 8. It is important to point out that these
calculations assume the aircraft is operating at MGTOW for all altitude.
increasing
altitude
Power
Available
stall speed at 10000 ft
Climb
S&L
increasing
altitude
Figure 8. Power Available Plot for Various Altitudes
Clearly the power available at any point in flight (Figure 8) will be more than needed,
offering a little margin of power for safety. This plot shows that that ceiling altitude will be
greater than 10,000 ft at MGTOW.
Endurance
The endurance requirement for the aircraft is at least 8 hr. For the design cruise speed,
the aircraft is operating at minimum drag conditions. Assuming a propeller efficiency of P =
0.85, a specific fuel consumption of P = 3.6058e-007 1/ft, and a power output of 13 hp and
constant cruise, 19 lbs of fuel is needed to cruise at 3,000 ft for 8 hr (Equation 13 from Appendix
30
A). Table 7 shows the endurance obtained by increasing the amount of fuel available for a
normal cruise.
Table 7. Endurance at Cruise (3,000 ft, 50 kts)
Fuel [lbs]
Endurance [hr]
19
8.1
25
10.8
36
13.6
This table shows that for each additional gallon of fuel burned, the aircraft can stay aloft
for an additional 2.7 hr.
Glide Range
The glide range of the aircraft is determined using Equation 12 from Appendix A and is a
function of maximum lift-to-drag ratio as well as absolute altitude. Calculating the best glide
speed, as well as the glide range for various altitudes yields the following table:
Table 8. Glide Range and Glide Speed versus Absolute Altitude
Altitude [ft]
Glide Speed [kts]
Range [nm]
3,000
48
7.9
5,000
49
13.2
7,000
50.7
18.5
10,000
53
26.5
In the event of an engine failure, this table shows that the best glide speed to maintain is
roughly 50 kts for all altitudes. Calculating the range associated with each altitude shows that
around 6,000 ft above sea level, the aircraft would be able to glide the full 15 nm required
operational range. If an engine failure were to occur, the vehicle can glide a fair distance and, in
some cases, return to the point of departure. This gliding ability is one of the main reasons the
aircraft was designed with a higher aspect ratio.
Turn Rate
The required turn rate for this vehicle is 6 deg/sec. Using Equation 14 from Appendix A,
the load factor acting on the aircraft with this rate of turn is 1.04. The bank angle associated with
this rate of turn is 15.3°. With such a small increase in load factor for turning, the stall speed of
the aircraft increases no more than 1 kts.
31
Figure 9. New Conceptual Design
32
Figure 10. Exploded View of New Concept
Group B Final Concept
The final scores of each concept appeared to be so close, the group also decided it would
be best to combine the components of each proposed concept. Concept B3 started out with a
slightly higher score, so further evaluation was necessary to figure out why this was the best.
Most of the components were similar for each of the conceptual designs, except for the
placement of the propeller and tail configuration. Concept B3 did not seem to score much higher
than any other conceptual designs, except in the category of acoustics. Concept B3 had a tractor
propeller, so it had the potential for much quieter propulsions compared to the pusher
configuration used in all of the other concepts. After the decision to use a tractor propeller, the
rest of the concept was created.
In using a pusher propeller, the fuselage and tail of many of the concepts were
unconventional.
However, since the final concept uses a tractor propeller, a conventional
fuselage and wing configuration was used, much like the one depicted in Figure 11. Instead of
using the exact fuselage of Concept B3, the fuselage was made more streamlined in order to
33
produce more favorable aerodynamic qualities. Winglets were also eliminated from the original
conceptual design in order to reduce the structural loading on the wings.
Unlike any of the previous concepts introduced, an H-tail is used on this final concept for
transportability and added reliability. In order to make the vehicle more transportable, multiple
vertical stabilizers may be used in order to help in decreasing the necessary height of the tail.
Another major concern for the conventional tail is that if the rudder fails by getting stuck in one
position or fails to activate, the yaw control of the vehicle would essentially be eliminated. By
adding a second vertical stabilizer, the second rudder should be able to provide a small amount
of yaw control, should this occur. Figure 11 shows an isometric view of the final concept.
Figure 11. Final Concept – Group B
Constraint Analysis
After a concept was chosen a constraint analysis was performed on the aircraft. Using
Equation 17 the power loading required for several cases was found and plotted vs. wing
loading. The constraint analysis graph is shown in Figure 12.
34
Figure 12. Constraint Analysis Curves for Final Concept
It was then determined that the proposed wing loading of 4 is close to ideal. The power
loading of 0.075 is more than required and will provide enough power for higher drag flight
regimes, if needed.
Airfoil Selection
The goal of the airfoil selection was to choose one that would provide 200 lb. of lift with
the selected area of 50 ft2 and would minimize the total drag. Eight airfoils (Table 9) were
compared using Martin Hepperle’s JavaFoil program10 at a calculated Reynolds number of
2,000,000 to determine the needed information for the elimination process.
Table 9. Airfoil Comparison
Airfoil
Clmax
Cl0α
(L/D)max
Cm¼ c max
SD 7062
1.371
0.354
25.327
-0.101
NACA 4412
1.184
0.368
26.362
-0.118
NACA 4415
1.344
0.382
27.187
-0.128
SD7034
1.093
0.295
28.357
-0.083
S 2027
1.045
0.23
25.678
-0.077
NACA 4418
1.515
0.397
26.032
-0.142
Eppler 68
1.096
0.389
28.589
-0.137
NACA 2412
1.008
0.184
28.217
-0.065
35
The first phase of airfoil eliminations was based solely on the maximum lift coefficient of
the airfoil and a Clmax of 1.15 was determined to be the lower limit; thus the SD 7034, S 2027,
Eppler 68, and NACA 2412 were eliminated. The next phase of eliminations consisted of
selecting the three airfoils with the highest maximum lift coefficients thus the NACA 4412 was
eliminated. With only three airfoils left, the NACA 4415, SD 7062 and NACA 4418, several
more factors were introduced into the airfoil elimination process. The final factors for the airfoil
selection criterion were, in no particular order; maximum lift coefficient, lift coefficient at zero
angle of attack, manufacturability, maximum coefficient of moment about the quarter chord and
maximum lift over drag ratio.
It is important to look at the manufacturability of the airfoil section because
imperfections in manufacturing could reduce the overall reliability. Features of an airfoil that
could decrease its manufacturability score are excessive camber, thickness and hard to cut
angles. The maximum lift over drag ratio is a factor that provides a decent overall look at the
performance of the airfoil, a higher maximum lift over drag ratio is desirable. After setting these
criteria each airfoil was given a score and the results compared, see Table 10.
Table 10. Results of Airfoil Ratings
Weighting
NACA 4415
SD 7062
NACA 4418
Clmax
0.35
4
3
5
Cl0α
0.2
4
3
4
(L/D)max
0.1
5
3
4
Manufacturability
0.25
4
4
2
Total Score
1
4
3.35
3.65
The NACA 4415 was chosen as the airfoil to be used for the aircraft concept. This airfoil
will be used for the initial concept tail sizing and other factors to be determined later as
constraint analysis progresses.
Tail Sizing
The objective of the preliminary tail sizing was to obtain a rough estimate of the needed tail
size. The tail surfaces were initially sized using Raymer’s equations8: (See Equation 18 and
Equation 19 in Appendix A and note Svt is the area of both verticals.) With the wingspan and
mean chord already constrained at 16 ft. and 3 ft., respectively, only the volume coefficients, Cht
and Cvt, and the moment arm lengths, Lht and Lvt, needed to be defined. A recommendation in
36
Raymer indicated a horizontal volume coefficient of 0.7 is common; however 0.6 was used to
account for the endplate effect from the H-tail. A vertical tail volume coefficient of 0.04 was
chosen based on an average value for comparator aircraft found in Raymer.
This gave a horizontal tail area of 13.85 ft2. The tail aspect ratio was also selected as two
thirds that of the wing based on Stinton’s9 recommendation, effectively increasing the stall angle
of the horizontal tail above that of the wing. Using a 7° leading edge sweep on the horizontal the
span, root chord and tip chord were found. Using these numbers and the assumption that the
vertical tails are mounted to the tips of the horizontal with a chord equal to the tip chord of the
horizontal the dimensions of the verticals were found. A NACA 0012 was picked for both the
horizontal and vertical tails to allow volume for the required structure. The results of the initial
sizing calculations are shown in Table 11.
Table 11. Initial Empennage Sizing Parameters
Horizontal Tail
Vertical Tail (for one tail)
Area
13.85 ft.²
2.35 ft.²
Span
7 ft.
1.5 ft.
Root Chord
2.22 ft.
1.8 ft.
Mean Chord
2.01 ft.
1.6 ft.
Tip Chord
1.8 ft.
1.4 ft.
Moment Arm
6.5 ft.
6.8 ft.
Taper Angle
7°
15°
Volume Coefficient
0.6
0.04
Engine Selection, Power Requirements, and Endurance
The proposed concept design will cruise at an average speed of 56 knots with a power
required of 4 hp at cruise (Figure 13 and Figure 14). The proposed concept can easily achieve
the required 70 knot maximum speed. Figure 13 shows how the cruise speed will change as the
mission progresses while Figure 14 shows the power required for the aircraft to stay airborne.
37
Figure 13. Cruise Speed and Stall Speed vs. Time
Figure 14. Power Required Curve with 15hp Available
The engine selection process was much like the airfoil selection process where several
engines were directly compared and a decision matrix was produced in order to make a selection.
Three engines were compared, two from Lightning Aircraft Inc and one from Desert Aircraft 11 12
13
. The relevant engine specifications are provided below in Table 12.
Table 12. Engine Specifications for Engine Comparison
Lightning Aircraft Inc
150D2-B
Lightning Aircraft Inc
250D2
Desert Aircraft
DA – 150
Output
15+ Hp
22 Hp
16.5 Hp
Weight
9.25 lbs
12.5 lbs
7.96 lbs
Fuel Consumption
0.8 lb/hp-hr
0.68 lb/hp-hr
0.5625 lb/hp-hr
Other Design Aspects
UAV
UAV
Acrobatics
38
The main problem with the Desert Aircraft DA-150 is the fact that it was designed
specifically for competition aerobatics. This means that this engine is specialized and highly
tuned. The high tuned and high performance nature of this engine put its long term endurance
reliability in question. Furthermore, this engine does not have a rear output shaft.
The Lightning Aircraft 150D2-B and 250D2 are both engines that were designed to be
used on UAVs. Both engines have rear output shafts in order to attach starters, alternators or any
other accessories that may be required.
Table 13. Engine Selection Decision Matrix
Weight
DA-150
150D2-B
250D2
Output
.2
4
4
5
Weight
.3
4
3
2
Fuel Consumption
.25
4
3
2
Output Shaft
.25
1
5
5
Total Score
1
3.25
3.7
3.35
As seen in Table 13, the Lightning Aircraft Inc 150D2-B engine was selected for this
concept design. This engine has a good balance of weight, output power and fuel consumption
as well as having the ability to attach various engine accessories to the rear output shaft.
Based on this engine selection the endurance of the proposed concept was determined.
This concept aircraft was proposed with an initial fuel capacity of 50 lbs. The endurance of the
aircraft with 50 lbs of fuel is around 16 hours. This is double the requirement which could allow
for an increase in payload weight if less endurance is required.
Starters and Alternators
In order to increase the reliability of the propulsion package on the aircraft it was decided
that a starter is a necessary engine component. Having a starter will allow the engine to be
restarted in mid flight, as well as allowing the ground crew to start the engine from a safe
distance.
One of the requirements for this concept was to be able to provide 10 watts of power at
12 volts during the duration of the mission. This is difficult and heavy to do with batteries alone.
Thus it was decided that an alternator was needed to charge a smaller set of batteries in order to
run the payload electronics on the aircraft.
39
The alternator recommended for use on this concept is a Sullivan Face Type alternator. 14
This alternator is simple and contains few moving parts and is thus reliable and easy to replace or
repair if a failure does occur. This alternator can be mounted on the rear output shaft or on the
front output shaft behind the propeller. See Reference 16 for an overview of the Sullivan
alternator. The starter15 that is recommended for this concept is also from Sullivan. They
manufacture several different styles of starters, a rear mount and an under mount style. They
also have a combination alternator/starter available. A starter style will be picked when it is
decided how the motor will be mounted in the aircraft and how much available clearance is
around the motor. The Sullivan alternators and starters can be mounted on any engine; however
they may require custom mounting brackets.
Stability
After a tail size was chosen the stability of the system was evaluated using Athena Vortex
Lattice (AVL).16 A simple AVL model was made and was used to find the neutral point of the
aircraft. Figure 15 shows the geometry plot of the AVL model. For the aircraft to be stable a
static margin of 5-15% percent was desired.
Figure 15. AVL Geometry Plot
40
The results from AVL show that the neutral point is 2.06 ft. back from the leading edge
of the wing. This is equal to 0.69c, which is a normal value for stable aircraft in AVL. The value
is high; however the fuselage will cause a destabilizing effect.
Reliability Analysis
The final concept was analyzed by the whole team in terms of reliability. One of the
major changes to the design was the iteration of the tail. The H-tail form was chosen for this
aircraft because it provided two rudders that could allow the plane to function and fly if one were
to fail, most likely a servo failure. Instead of a broad nose, the team also chose a sleek, tapering
nose integrated with the propeller to provide less drag from the fuselage. This will enable a
longer glide distance if the engine were to fail.
Once a final concept is chosen, the engine type, electrical components, and navigation
system will be chosen based on historical data of mean time until failure and failure rates. This
will give the aircraft the highest possible percentage of combined reliability for the entire aircraft
system.
41
Final Values
Table 14. Final Values for Group B Concept
Fuselage
Value
Performance Data
Value
Length (ft)
11.5
CL max
1.344
Width (ft)
1.8
CL cruise
0.4
Height (ft)
1.8
(L/D)max
10.36
Wing
Value
Endurance (Const alt) (hr)
16.23
Airfoil
NACA 4415
Endurance (Const V) (hr)
17.67
Span (ft)
16
Maximum Climb Rate (ft/min)
1500
Area (ft2)
50
Stall Speed (knots)
30
Chord at Root (ft)
3.5
Maximum Speed (knots)
100
Chord at Tip (ft)
2.5
Cruise Speed (knots)
58
Aspect Ratio
5.12
Weight Statement
Value
Horizontal Stabilizer
Value
Payload Range (lb)
35-45
Airfoil
NACA 0012
Dry Weight (MEW) (lb)
150
Span (ft)
7
Gross Takeoff Weight (lb)
200
Chord at Root (ft)
2.22
Engine
Details
Chord at Tip (ft)
1.8
Engine
Lightning Aircraft Inc
150D2-B
Max Power (hp)
15+
SFC (lb/hp-hr)
0.8
Area
(ft2)
13.85
Volume Coefficient
0.6
Vertical Stabilizer
(values for one vertical)
Value
Airfoil
NACA 0012
Height (ft)
1.5
Chord at Root (ft)
1.8
Chord at Tip (ft)
1.4
Area (ft2)
2.35
Volume Coefficient
0.04
42
Loughborough University Design Process
Each student at Loughborough University came up with six conceptual designs. These
designs were then grouped together based on common traits. Five groups in total were needed to
group the initial concepts: conventional, multi-tail, multi-wing, multi-fuselage, and pylonmounted engine. A decision matrix was then used to rule out 3 of the initial concept groups,
multi-fuselage, multi-wing, and multi-tail. With two groups remaining, a detailed analysis of the
conventional and pylon-mounted concepts was performed and approximate aircraft sizing was
determined (Table 15 and Table 16). Each concept was then sketched in CAD (Figure 16 and
Figure 17) and dimensioned in meters.
Figure 16. LU Conventional Concept
Table 15. LU Conventional Concept Sizing
Parameter
Meters
Feet
Total Length
3
9.8
Fuselage Length
1.5
4.92
Fuselage Diameter
0.3
0.98
Wing Span
4.75
15.58
Wing Chord
0.53
1.74
Tail Span
1.08
3.54
Tail Chord
0.53
1.74
Tail Height
0.6
1.97
43
Figure 17. LU Pylon-Mounted Engine Concept
Table 16. LU Pylon-Mounted Concept Sizing
Parameter
Wing
SI
Tail
US
2
27.01 𝑓𝑡
SI
2
0.398 𝑚
US
2
Area
2.511 𝑚
Aspect Ratio
9
9
-
-
Span
4.75 𝑚
15.59 𝑓𝑡
-
-
Mean Chord
0.528 𝑚
1.73 𝑓𝑡
-
-
4.284𝑓𝑡
The advantages and disadvantages for the final two concepts were determined and listed
for future debate (Table 17). These key points were later brought up in the elimination process
with Virginia Tech. It is important to note that both concepts from the Loughborough team
contained an internal combustion engine as the main propulsion system and a back up electric
motor in order to get the aircraft back to base safely. This back up engine is to be used in case of
main engine failure or to provide additional power.
44
Table 17. LU Final Concepts Advantages and Disadvantages
Conventional
Advantages
Pylon-Mounted Engine
Disadvantages
Advantages
Tractor propeller
reduces risk of propeller
strike
Rear pusher adds to
expense and weight
Electric back up can be
mounted near the
primary
Modular lightweight tailboom
Chance of tail strike
damaging rear pusher
Avionics, payload and
propulsion at small risk
in a crash
Electric get home/ dash
facility
Airfoils experience wash
from tractor propulsion
system
Easy access for
maintenance
Possible to over-torque
engine on rail launch
Large internal fuselage
volume
Main weight
contributions close to
center of gravity
Simplicity in design and
manufacture
Large knowledge base
from existing
conventional aircraft
Disadvantages
Large nose down
pitching moment
requires counter-action
from tail-plane
High mounted
propulsion system may
cause instability during
taxi/landing/take off
Downselection
A total of four conceptual designs were suggested by Virginia Tech and Loughborough
University. In order to find the ideal design, three of these concepts were eliminated using a
variety of methods including the listing of advantages and disadvantages and group discussions.
Key issues that arose from presenting each of the concepts were identified by the combined
group in order to determine points of discussion for each design. Of these key issues, the ones
found to have a greater effect on the overall and final configuration were complexity of design,
thrust line problems, center of gravity placement (lateral and vertical), noise, engine placement,
and propeller protection. These key issues were considered by each group member individually,
and then thoughts on how they applied to each conceptual design were brought up in a group
discussion.
The elimination process included identifying categories that fit each of the conceptual
designs to reduce the number of designs to decide between. This involved identifying adaptable
components of each design. For example, wing placement was considered a trivial modification
for each concept, because each design could support a low-, mid-, or high-mounted wing. Other
adjustable features of each design included tail type, aspect ratio, landing gear configuration, and
placement of auxiliary power systems. From this grouping of conceptual design types, the two
45
suggested conventional tractor propeller configurations were combined to reduce the number of
concepts to three.
The second step of the elimination process involved writing a list of advantages and
disadvantages for each of the remaining three conceptual designs as the Loughborough team had
done with their concepts (Table 17).
These allowed the combined group to analyze the
aforementioned key issues and how each conceptual design fared in each of the categories. For
example, the twin tail-boom pusher configuration had a clear disadvantage in complexity of
design, lateral center of gravity placement, structural robustness, and noise. Because the twin
tail-boom pusher design had more parts and deviated from the conventional design, it was
considered to be a more complex design. Complex designs were considered to be less reliable,
as it would require a ground crew to have more knowledge of how to assemble the aircraft. The
lateral center of gravity placement was considered to be unstable because the removable
cartridge may allow for the CG to shift depending on how the cartridge was loaded.
Furthermore, the overall balance of the aircraft was seemingly non-existent due to the weight of
the engine and the moment-arm of the tail being compensated by only the payload in the front.
From the analysis of key issues for each concept, the twin tail-boom pusher design was
eliminated because its disadvantages far outweighed the number of advantages it provided.
After the first two steps of the elimination process, only the conventional configuration
and pylon-mounted pusher remained as viable concepts. In order to save time and to try another
method of elimination, the combined Virginia Tech and Loughborough University groups were
split into four groups of six, where the members of each group were a mix of students from each
university. Within these small groups, issues such as whether or not the problems previously
presented could be designed for as well as examples of current UAVs with similar configurations
were discussed. From these small group discussions, each group came away with a consensus
that the pylon-mounted pusher design would be the best choice between the last two concepts as
long as some modifications were made.
The overall reasoning that each group had for selecting the pylon-mounted pusher
included the diversity of options that the design provided, the ease of engine cooling, the
propeller protection provided by mounting the engine high, the reduction in noise, and the ease
of maintenance. The diversity of options in selecting the pylon-mounted engine design included
the ability to have all of the same configuration options as the conventional design as well as the
46
ability to have either a tractor or pusher propeller without worrying about the lateral center of
gravity effects. Furthermore, by mounting the engine high, the noise could be reduced by adding
some of the aircraft’s own structure as a physical barrier between the ground and the propeller,
the engine could be cooled by the free stream air-flow, easier to access for maintenance would be
provided, and the propeller would be well protected from ground strikes.
Suggested modifications for the pylon design in order to make it the best concept possible
included placing the wing as high as possible, using a tractor engine, and using a conventional
tail. The higher wing placement would provide better stability, which is necessary because the
vertical CG is very high in this configuration. The use of a tractor engine provides less noise
because it does not have to cut through the wake of a pylon and back-up propeller. In this case,
the electric engine would be mounted on the aft portion of the pylon in a pusher configuration
where the propeller blades could be folded back. Finally, the use of a conventional tail as
opposed to any other tail was selected because it provided the most control upon failure of a
control surface while reducing the amount of structure necessary in the tail.
Final Concept
Constraint Analysis
The relationship between thrust to weight and wing loading is shown in Equation 21 in
Appendix A. The following assumptions in Table 23 were made.
Table 18. Assumptions for Constraint Analysis
Aspect Ratio, AR
6.25
Stall Lift Coefficient, C L , max
1.3
Drag Coefficient,
CD0
Oswald Efficiency Factor, e
0.02
0.9
The constraint analysis in Figure 20 illustrates the thrust to weight ratio and wing loading
for the design specifications including a cruise speed of 50 kts, dash speed of 70 kts, climb rate
of 200 ft/min, and a turn rate of 6 degrees/sec.
47
1.2
T/W Climb
1
T/W Strait and Level
0.8
T/W 70 kt Dash
T/W Min Turn
0.6
Landing
T/W
0.4
Stall
Design Point
Design
Point
0.2
0
0
1
2
3
4
W/S [lb/ft^2]
5
6
7
8
Figure 18. Constraint Analysis for New Conceptual Design
𝑙𝑏
The design point selected results in a wing loading of 3.1 𝑓𝑡 2 and a thrust to weight of
0.14. Assuming an aircraft weight of 200 lbs, the required wing area is 64 ft2, and the thrust
required is 28 lbs.
Wing Sizing
The first step to wing sizing was determining a CLcruise, which was set to 0.4. This yielded a
wing loading of 3.125 lb/ft2 (150 pa) using Equation 20. After validating that this wing loading
would work with the constraint analysis, the wing area was found assuming a MGTOW 200 lb
(91 kg). From there the span was varied until it was small enough to fit in the 10 ft. box limit that
was imposed and had a high enough aspect ratio. The final wing numbers are shown in Table 19.
Table 19. Wing Sizing Parameters
Area
64 ft² (5.95 m2)
Span
20 ft. (6.10 m.)
Chord
3.2 ft. (0.98 m.)
Aspect Ratio
6.25
Wing Loading
3.125 lb/ft2 (150 pa.)
48
Tail Sizing
After the wing size was chosen, the tails were sized using Raymer’s equations.8 (See
Equation 18 and Equation 19 in Appendix A.) The moment arm for both the horizontal and
vertical was set to eight feet (2.44 m.) and the volume coefficients, Cht and Cvt, were found from
recommendations in Raymer. This gave a horizontal tail area of 16.66 ft2 (1.55 m2). The tail
aspect ratio was also decided to be two thirds that of the wing based on Stinton’s9
recommendation, effectively increasing the stall angle of the horizontal tail above that of the
wing. Using a 10° leading edge sweep on the horizontal the span, root chord and tip chord were
found. The vertical area was found to be 6.00 ft2 (0.55 m2). The preliminary height, root chord
and tip chord were found by trial and error. Table 20 shows the final tail numbers.
Table 20. Initial Empennage Sizing Parameters
Horizontal Tail
Vertical Tail
Area
16.66 ft² (1.55 m2)
6.00 ft² (0.55 m2)
Span
8.35 ft. (2.55 m.)
3.0 ft. (0.91 m.)
Root Chord
2.36 ft. (0.72 m.)
2.5 ft. (0.76 m.)
Mean Chord
2.00 ft. (0.61 m.)
2.0 ft. (0.61 m.)
Tip Chord
1.63 ft. (0.50 m.)
1.5 ft. (0.46 m.)
Moment Arm
8.00 ft. (2.44 m.)
8.0 ft. (2.44 m.)
Taper Angle
10°
18°
Volume Coefficient
0.65
0.04
Performance Analysis
The performance of this concept can be broken down into a number of categories: power
required for straight and level flight, power required for climb, stall speeds for straight and level
flight and turns, endurance, and glide range. Each of these categories is analyzed using the
assumptions in Table 21.
Table 21. Assumptions for Performance Analysis
Planform Area, S
64 ft2
Wing Span, b
20 ft
Average Chord, c
3.2 ft
Aspect Ratio, AR
6.20
Maximum Weight
200 lbs
Cruise Lift Coefficient, C L , cruise
0.4
49
Stall Lift Coefficient, C L , max
Drag Coefficient,
CD0
0.038
Oswald Efficiency Factor, e
Climb Rate,
1.3
dh dt
0.9
200 ft/min
Specific Fuel Consumption,
P
3.605769 x 10-7
Additionally, the aircraft is assumed to operate at altitudes of sea-level, 3,000 ft, 5,000 ft,
and 10,00ft. For the purpose of analysis, the normal cruising altitude will be interpreted as
5,000 ft mean sea-level. Using the preceding assumptions, the power required for flight can be
estimated.
The power required to maintain straight and level flight can be calculated using Equation
2, found in the list of equations in the appendix. Similarly, using Equation 11 the power
required for climbing flight can be found. In each case, the power required is found as a
function of velocity and plotted in the following graph. For a cruise altitude and speed of 5,000
ft and 50 kts respectively, the power required for straight and level flight is 3.5 hp. Likewise,
the powered required to climb at 200 ft/min at maximum weight is 4.7 hp. Straight and level
flight at 5,000 ft and 70 kts maximum cruise speed requires 8.0 hp.
50
Increasing altitude
Pavail
Preq Climb
Preq Straight
and Level
Increasing altitude
Figure 19. Power Curves
From the graph above, estimated power available lines have been drawn to provide a
general idea of the flight performance that is desired. The three horizontal lines on the top half
of the plot represent the power available for flight at sea-level, 5,000 ft, and 10,000 ft, with sealevel being the uppermost line. Assuming an engine with a maximum power output of 10 hp at
sea-level, the aircraft is able to reach the maximum cruising speed of 70 kts at around 5,000 ft
altitude. The aircraft is easily able to climb to 10,000 ft at cruise speed and at full weight. In
fact, the aircraft can exceed the 200 ft/min climb rate at all altitudes up to 10,000 ft and all
speeds up to 60 kts.
Using Equation 9, the stall speed was calculated for all three altitudes for straight and
level flight as well as turning flight at MGTOW (Table 22). For turning flight defined in the
requirements, a load factor n = 1.1 is used in Equation 9.
51
Table 22. Stall Speed at Various Altitudes
Straight and Level
Altitude
Stall Speed n = 1.0
Turning
Stall Speed n = 1.1
0 ft
27 kts
28 kts
5,000 ft
29 kts
30 kts
10,000 ft
31 kts
33 kts
Regardless of altitude, the stall speed of the aircraft is well away from the normal cruise
speed of 50 kts. Keeping a fairly large gap between stall speed and cruise speed improves the
safety of the aircraft in the advent the aircraft encounters gusty winds during flight.
Equation 13 is used to calculate the endurance of the aircraft based on constant speed
flight and a fixed amount of available fuel. Using an iterative method, the amount fuel required
to obtain an endurance of 8 hours at 5,000 ft is roughly 22 lbs. With this amount of fuel, a range
of 485 nm is possible at these flight conditions. Since the design calls for cruise at constant
speed and constant altitude, an additional few pounds of fuel can make up for the difference in
flight profile.
In the event that the aircraft losses engine power, the probability for a safe landing is
improved dramatically with an increasing glide range. Equation 12 roughly estimates the glide
range of an aircraft given a maximum lift-to-drag ratio and an altitude. The maximum lift to
drag ratio for this aircraft is L D max = 10.78. At 5,000 ft mean sea level, the aircraft can glide
about 8.8 nm. At 10,000 ft the glide range increases to 17.7 nm. In the latter case, the aircraft
has a good chance of returning to base after an engine failure even while operating at the
maximum design range of 15 nm.
Constraint Analysis
The relationship between thrust to weight and wing loading is derived from conservation
of energy and is shown by Equation 21 in Appendix A. The following assumptions in Table 23
were made.
Table 23. Assumptions for Constraint Analysis
Aspect Ratio, AR
6.25
Stall Lift Coefficient, C L , max
1.3
Drag Coefficient,
CD0
Oswald Efficiency Factor, e
52
0.02
0.9
The constraint analysis in Figure 20 illustrates the thrust to weight ratio and wing loading
for the design specifications including a cruise speed of 50 kts, dash speed of 70 kts, climb rate
of 200 ft/min, and a turn rate of 6 degrees/sec.
1.2
T/W Climb
1
T/W Strait and Level
0.8
T/W 70 kt Dash
T/W Min Turn
0.6
Landing
T/W
0.4
Stall
Design Point
Design
Point
0.2
0
0
1
2
3
4
W/S [lb/ft^2]
5
6
7
8
Figure 20. Constraint Analysis for New Conceptual Design
𝑙𝑏
The design point selected results in a wing loading of 3.1 𝑓𝑡 2 and a thrust to weight of
0.14. Assuming an aircraft weight of 200 lbs, the required wing area is 64 ft2, and the thrust
required is 28 lbs.
Conclusion
From the Virginia Tech and Loughborough University concepts, a new concept was
generated (see Figure 21 and Figure 22). The new concept, referred to as a pylon design due to
the placement of the engine, inherited features from the previous designs. The geometry of the
concept is conventional with the exception of the engine mounted above the wing. A high wing
and a conventional tail design are used along with a tail-dragger landing gear, fixing a skid in the
place of the tail wheel. The skid is intended to provide added friction after landing to help stop
the aircraft. The fuselage is widest in the area under the wing to accommodate the payload,
avionics, batteries, and other onboard devices, locating them close to the CG. The concept
53
utilizes an internal combustion engine mounted at the top of the pylon in a tractor configuration.
Also in the pylon is the auxiliary propulsion unit, an electric motor and folding propeller
intended to give the aircraft about a half hour of power in the event of the main internal
combustion engine failing. The electric motor is in a pusher configuration, facing aft. The fuel
will be stored in the pylon, above the wing to raise the vertical position of the CG. For the wing
airfoil, the NACA 4415 was tentatively selected because it gave a good lift to drag ratio, a
relatively high maximum lift coefficient and the shape is not difficult to build.
Figure 21. Final Concept Drawing
54
Figure 22. Final Concept 3-View
55
Appendix A – List of Equations
Eqn. #
Equation 1
Equation 2
Equation 3
Equation
2𝑊
𝐶𝐿 𝜌𝑉 2
1 2
2𝐾𝑊 2
𝑃 = 𝐶𝐷0 𝜌𝑉 𝑆 +
2
𝜌𝑉𝑆
𝑆=
𝐾=
1
𝜋𝐴𝑅𝑒
𝟑
Equation 4
Equation 5
Equation 6
𝜼𝒑
𝑪𝑳 𝟐
𝟏
𝟏
𝑬=
(
−
)
√𝟐𝝆𝑺
𝜸𝒑
𝑪𝑫 √𝑾𝟐 √𝑾𝟏
𝐸=
𝜂𝑝 1 𝐶𝐿 𝑊1
ln
𝛾𝑝 𝑉 𝐶𝐷 𝑊2
𝑳
𝟏
( )
=
𝑫 𝒎𝒂𝒙 𝟐√𝑪𝑫𝟎 𝑲
D CD
1
2
V 2 S
2
CL
CD0
AR
e
Equation 7
CD0
1
2
2 V S
Equation 8
Pavail TV PSL alt
SL
Equation 9
Vstall
Equation 10
CLMP
1
2
V 2 S
W2
AR e 12 V 2 S
nW
C Lmax
1
2
S
3CD0
k
3CLMD
Equation 12
dh V dV Pavail Preq
dt g dt
W
Rglide hL D max
Equation 13
E
Equation 11
P 1 CL W1
ln
P V CD W2
56
Equation 15
d g 2
SCL
n 1 g
dt V
2W
C
Length AWO
Equation 16
F (t ) P(T t ) f (u )du for t > 0
Equation 14
Equation 175
n2 1
n
𝑃
𝑞𝐶𝐷0
𝑘𝑛2 𝑊
1 𝑑ℎ 1 𝑑𝑉
=[
+(
)+
+
]𝑉
𝑊
𝑊
𝑞 𝑆
𝑉 𝑑𝑡 𝑔 𝑑𝑡
𝑆
C ht c wing S wing
Equation 18
Horizontal tail area: S ht
Vertical tail area:
S vt
Cvt bwing S wing
Equation 19
Equation 20
𝑊 1 2
= 𝜌𝑉 𝐶𝐿𝑐𝑟𝑢𝑖𝑠𝑒
𝑆
2
Equation 21
Lht
Lvt
𝑇
𝑊 𝑘𝑛2 𝑊
1 𝑑ℎ 1 𝑑𝑉
= 𝑞𝐶𝐷0 +
+
+
𝑊
𝑆
𝑞 𝑆
𝑉 𝑑𝑡
𝑔 𝑑𝑡
1
where: 𝑞 = 1⁄2 𝜌𝑉 2 𝑘 = 𝜋𝐴𝑅𝑒
1 [hp] = 550 [lbs-ft/sec]; 1 [ft/sec] =
0.5924838 [kt]; 1 [nm] =
57
6076.131 [ft]
Appendix B – Initial Concept Drawings
Concept A1
58
Concept A2
59
Concept A3
60
Concept A4
61
Concept A5
62
Concept B1
63
Concept B2
64
Concept B3
65
Concept B4
66
Concept B5
67
Appendix C – Decision Matrix Group A
Design Matrix
Wing
Wt.
Concept A1
Concept A2
Concept A3
Concept A4
Wt.
Score
Wt.
Score
Wt.
Score
Wt.
Score
Score
Score
Score
Score
Concept A5
Score
Wt.
Score
Wing Loading
15
3.2
48.0
3.2
48.0
3.8
57.0
3.1
46.5
3.4
51.0
Structural Implications
15
3.4
51.0
3.4
51.0
3.0
45.0
2.8
42.0
3.2
48.0
Aspect Ratio
15
3.8
57.0
2.4
36.0
3.8
57.0
3.6
54.0
3.4
51.0
Wing Position
10
3.4
34.0
3.0
30.0
3.1
31.0
4.0
40.0
3.6
36.0
Weight
10
2.8
28.0
2.7
27.0
2.8
28.0
3.8
38.0
3.2
32.0
Reliability
10
3.2
32.0
3.2
32.0
3.0
30.0
3.2
32.0
3.2
32.0
Maintenance
10
3.4
34.0
3.0
30.0
3.2
32.0
3.4
34.0
3.4
34.0
Integration
10
3.4
34.0
3.2
32.0
3.6
36.0
3.2
32.0
3.4
34.0
5
3.0
15.0
3.4
17.0
3.4
17.0
3.8
19.0
3.4
17.0
284.
0
Ease of Manufacture
SUBTOTAL
CATEGORY WEIGHT
0.175
285.0
49.9
255.0
44.6
276.0
48.3
291.0
50.9
49.7
Vertical Stabilizer
Impact on Stability/Control
25
3.6
90.0
2.9
72.5
3.2
80.0
3.8
95.0
3.2
80.0
Aerodynamic Interference
15
3.4
51.0
2.8
42.0
3.8
57.0
3.4
51.0
4.0
60.0
Reliability
15
3.2
48.0
2.6
39.0
3.2
48.0
3.4
51.0
2.7
40.5
Structural Implications
15
3.4
51.0
3.0
45.0
3.0
45.0
3.4
51.0
2.5
37.5
Ease of Manufacture
10
3.2
32.0
3.2
32.0
2.8
28.0
3.6
36.0
2.5
25.0
Integration
10
2.8
28.0
3.0
30.0
2.6
26.0
3.4
34.0
3.0
30.0
Maintenance
5
3.0
15.0
3.0
15.0
2.8
14.0
3.2
16.0
2.8
14.0
Weight
5
3.0
15.0
2.8
14.0
3.0
15.0
3.2
16.0
3.4
17.0
304.
0
SUBTOTAL
0.05
16.5
289.5
14.5
313.0
15.7
350.0
17.5
15.2
Tail
CATEGORY WEIGHT
330.0
Horizontal Stabilizer
Impact on Stability/Control
25
3.8
95.0
2.6
65.0
3.6
90.0
3.8
95.0
3.4
85.0
Aerodynamic Interference
15
3.2
48.0
2.6
39.0
3.8
57.0
3.2
48.0
4.0
60.0
Reliability
15
3.4
51.0
2.8
42.0
3.4
51.0
3.4
51.0
2.7
40.5
Structural Implications
15
3.2
48.0
2.6
39.0
3.2
48.0
3.4
51.0
2.5
37.5
Ease of Manufacture
10
3.4
34.0
3.2
32.0
3.0
30.0
3.6
36.0
2.5
25.0
Integration
10
3.0
30.0
3.0
30.0
2.4
24.0
3.4
34.0
3.0
30.0
Maintenance
5
3.0
15.0
3.0
15.0
3.0
15.0
3.2
16.0
2.8
14.0
Weight
5
3.0
15.0
3.0
15.0
3.0
15.0
3.2
16.0
3.2
16.0
308.
0
SUBTOTAL
CATEGORY WEIGHT
0.05
336.0
16.8
277.0
13.9
68
330.0
16.5
347.0
17.4
15.4
Fuselage
Weight
20
3.0
60.0
2.6
52.0
3.4
68.0
3.2
64.0
3.0
60.0
Integration
15
3.2
48.0
3.2
48.0
3.2
48.0
3.0
45.0
3.4
51.0
Structural Implications
15
2.6
39.0
3.0
45.0
3.2
48.0
2.6
39.0
3.2
48.0
Ease of Manufacture
10
3.4
34.0
2.8
28.0
3.4
34.0
2.8
28.0
3.6
36.0
Maintenance
10
3.0
30.0
3.0
30.0
3.2
32.0
2.8
28.0
3.2
32.0
Reliability
10
2.6
26.0
3.0
30.0
2.8
28.0
2.6
26.0
3.2
32.0
Size
10
3.2
32.0
2.5
25.0
3.4
34.0
2.6
26.0
2.8
28.0
Aesthetic
5
2.8
14.0
2.6
13.0
3.2
16.0
3.0
15.0
3.0
15.0
Drag
5
3.2
16.0
3.0
15.0
3.4
17.0
4.0
20.0
2.8
14.0
256.
0
SUBTOTAL
Propulsion
CATEGORY WEIGHT
0.1
299.0
29.9
23.4
257.0
25.7
227.0
22.7
25.6
Reliability
20
3.2
64.0
2.7
54.0
3.6
72.0
3.0
60.0
3.0
60.0
Maintenance
15
3.2
48.0
3.0
45.0
2.8
42.0
3.0
45.0
3.0
45.0
Noise
15
3.0
45.0
3.1
46.5
3.0
45.0
3.0
45.0
3.4
51.0
Fuel Consumption
10
3.4
34.0
3.2
32.0
3.8
38.0
3.8
38.0
3.4
34.0
Integration
10
3.2
32.0
2.4
24.0
3.2
32.0
3.4
34.0
3.4
34.0
Position
10
3.2
32.0
2.6
26.0
3.2
32.0
3.2
32.0
3.2
32.0
Power Output
10
3.6
36.0
3.0
30.0
4.0
40.0
4.4
44.0
3.8
38.0
Weight
10
2.8
28.0
3.6
36.0
3.2
32.0
4.2
42.0
3.7
37.0
271.
0
SUBTOTAL
CATEGORY WEIGHT
Landing Gear
234.0
0.2
255.0
51.0
239.5
47.9
261.0
52.2
280.0
56.0
54.2
Braking
15
3.4
51.0
3.0
45.0
3.4
51.0
3.8
57.0
3.2
48.0
Ground Handling
15
4.2
63.0
3.0
45.0
3.2
48.0
2.2
33.0
4.0
60.0
Structural Implications
15
3.4
51.0
3.0
45.0
3.0
45.0
2.6
39.0
3.0
45.0
Ease of Manufacture
10
2.9
29.0
3.0
30.0
3.2
32.0
2.8
28.0
2.8
28.0
Ground Clearance
10
3.6
36.0
2.9
29.0
2.8
28.0
3.4
34.0
3.0
30.0
Integration
10
3.2
32.0
3.0
30.0
3.0
30.0
2.4
24.0
3.0
30.0
Maintenance
10
3.0
30.0
3.0
30.0
3.0
30.0
3.0
30.0
3.0
30.0
Reliability
10
3.0
30.0
3.0
30.0
3.0
30.0
3.0
30.0
3.1
31.0
5
3.0
15.0
3.0
15.0
3.0
15.0
3.0
15.0
3.0
15.0
269.
0
Weight
SUBTOTAL
CATEGORY WEIGHT
0.1
286.0
28.6
254.0
25.4
69
258.0
25.8
233.0
23.3
26.9
Performance
Endurance
20
4.0
80.0
3.4
68.0
3.8
76.0
4.0
80.0
3.8
76.0
Fuel Weight
15
3.4
51.0
2.4
36.0
3.6
54.0
4.0
60.0
3.6
54.0
Glide Range
15
3.8
57.0
2.9
43.5
3.4
51.0
3.2
48.0
3.2
48.0
Ceiling
10
3.6
36.0
3.2
32.0
3.4
34.0
3.4
34.0
3.2
32.0
Landing
10
3.2
32.0
2.8
28.0
3.2
32.0
2.8
28.0
3.2
32.0
Maximum Velocity
10
3.2
32.0
3.2
32.0
3.6
36.0
3.6
36.0
3.2
32.0
Range
10
3.8
38.0
4.0
40.0
3.2
32.0
3.6
36.0
3.4
34.0
Velocity at Stall
10
3.0
30.0
3.0
30.0
2.8
28.0
3.4
34.0
3.0
30.0
338.
0
SUBTOTAL
Payload
CATEGORY WEIGHT
62.3
309.5
54.2
343.0
60.0
356.0
62.3
59.2
Location
50
3.4
170
3.0
150
3.8
190
2.8
140
3.6
180
Visibility
50
3.2
160
3.0
150
3.8
190
2.4
120
3.6
180
SUBTOTAL
CATEGORY WEIGHT
Overall
0.175
356.0
0.05
330.0
16.5
300.0
15.0
380
19.0
260
13.0
360
18.0
CG/Weight Distribution
25
3.4
85.0
2.5
62.5
3.8
95.0
3.6
90.0
3.3
82.5
Feasibility
20
3.2
64.0
2.9
58.0
2.8
56.0
3.8
76.0
3.5
70.0
Storage/Portability
20
3.4
68.0
2.6
52.0
2.9
58.0
4.0
80.0
3.2
64.0
Reliability
15
3.4
51.0
3.0
45.0
3.0
45.0
3.2
48.0
3.2
48.0
Aesthetics
10
3.2
32.0
3.0
30.0
2.8
28.0
3.2
32.0
2.7
27.0
Crashworthiness
10
2.6
26.0
3.0
30.0
2.6
26.0
3.0
30.0
3.0
30.0
SUBTOTAL
CATEGORY WEIGHT
Total Score
0.1
326.0
277.5
308.0
356.0
321.5
32.6
27.8
30.8
35.6
32.2
304.1
266.6
294.0
298.7
296.3
70
Wing
Weight
Appendix D – Decision Matrix, Group B
Tail
concept 5
weighted
score
weighted
score
weighted
score
weighted
score
weighted
3.92
1.176
3.25
0.975
3.75
1.125
3.67
1.101
3.17
0.951
Weight
0.20
3.25
0.65
4.25
0.85
3.17
0.634
3.42
0.684
4
0.8
Impact on Stability/Control
0.20
3.33
0.666
4
0.8
3.92
0.784
4.17
0.834
3.17
0.634
Structural Implications
0.20
3.5
0.7
3.5
0.7
3.42
0.684
3.5
0.7
3.33
0.666
Integration with Fuselage
0.05
3.58
0.179
3.75
0.1875
3.33
0.1665
3.58
0.179
3.42
0.171
Ease of Manufacture
0.05
3.75
0.1875
3.75
0.1875
2.42
0.121
3.67
0.1835
3.5
0.175
SUBTOTAL
3.5585
3.7
3.5145
3.6815
3.397
0.1
0.35585
0.37
0.35145
0.36815
0.3397
Weight
0.35
3.42
1.197
4.5
1.575
3.83
1.3405
3.33
1.1655
4
1.4
Impact on Stability/Control
0.20
3.08
0.616
3.83
0.766
4
0.8
3.42
0.684
3.67
0.734
Structural Implications
0.20
3.25
0.65
2.92
0.584
4.58
0.916
3.17
0.634
3.08
0.616
Aerodynamic Efficiency
0.15
3.17
0.4755
4.17
0.6255
3.42
0.513
3.33
0.4995
3.92
0.588
Integration with Fuselage
0.05
3.33
0.1665
3.5
0.175
3.92
0.196
2.75
0.1375
3.5
0.175
Ease of Manufacture
0.05
3.25
0.1625
3.92
0.196
3.83
0.1915
3.08
0.154
3.75
0.1875
SUBTOTAL
3.2675
3.9215
3.957
3.2745
3.7005
0.1
0.32675
0.39215
0.3957
0.32745
0.37005
Weight
0.35
2.75
0.9625
4.42
1.547
3.25
1.1375
3.5
1.225
4.08
1.428
Payload Integration
0.20
3.5
0.7
3
0.6
3.5
0.7
3.17
0.634
3.33
0.666
Structural Implications
0.20
3.75
0.75
3.58
0.716
3.92
0.784
3.58
0.716
3.42
0.684
Aerodynamic Efficiency
0.15
3.83
0.5745
3.67
0.5505
3.42
0.513
4.17
0.6255
2.83
0.4245
Ease of Manufacture
0.10
3.25
0.325
3.58
0.358
3.83
0.383
2.92
0.292
3.42
0.342
SUBTOTAL
CATEGORY WEIGHT 0.1
Propulsion
concept 4
score
0.30
CATEGORY WEIGHT
3.312
3.7715
3.5175
3.4925
3.5445
0.3312
0.37715
0.35175
0.34925
0.35445
Structural Implications
0.35
2
0.7
3.83
1.3405
4.5
1.575
3.17
1.1095
3.17
1.1095
Integration with Aircraft
0.25
2.7
0.675
3.8
0.95
4.4
1.1
3.5
0.875
3.6
0.9
Acoustics
0.20
3.1
0.62
3.3
0.66
4.2
0.84
3.2
0.64
3.2
0.64
Fuel Consumption
0.10
3.17
0.317
2.67
0.267
3.33
0.333
3
0.3
3
0.3
Weight
0.10
3.5
0.35
4.25
0.425
4.13
0.413
3.88
0.388
4.25
0.425
SUBTOTAL
2.662
3.6425
4.261
3.3125
3.3745
0.1
0.2662
0.36425
0.4261
0.33125
0.33745
CATEGORY WEIGHT
Conformity to
Requirements
Concept Designs
concept 3
concept 2
Aerodynamic Efficiency
CATEGORY WEIGHT
Fuselage
concept 1
Endurance
0.35
4.25
1.4875
3.67
1.2845
4.33
1.5155
3.5
1.225
3.67
1.2845
Landing Distance
0.25
3
0.75
3.2
0.8
2.7
0.675
3.2
0.8
2.8
0.7
Weight of Payload
0.20
3.8
0.76
3.9
0.78
3.9
0.78
3.8
0.76
3.8
0.76
Speed
0.15
4
0.6
3.17
0.4755
3.92
0.588
3.33
0.4995
3.5
0.525
Acoustics
0.05
3.3
0.165
3.3
0.165
4.2
0.21
3.3
0.165
3.3
0.165
SUBTOTAL
3.7625
3.505
3.7685
3.4495
3.4345
0.15
0.564375
0.3505
0.37685
0.34495
0.34345
CATEGORY WEIGHT
71
Reliability
Glide Characteristics
0.30
4.33
1.299
3.67
1.101
3.58
1.074
4
1.2
3.08
0.924
Structural Integrity
0.40
3.9
1.56
3.5
1.4
4.2
1.68
3.5
1.4
3.9
1.56
Landing Gear
Control Surfaces
(malfunction)
0.10
3.4
0.34
3.5
0.35
3.3
0.33
3.3
0.33
3.4
0.34
0.20
3.5
0.7
3.2
0.64
3.7
0.74
3.3
0.66
3.4
0.68
SUBTOTAL
3.899
3.491
3.824
3.59
3.504
0.3
1.1697
1.0473
1.1472
1.077
1.0512
Overall Aircraft
Human Factor
CATEGORY WEIGHT
Ease of Construction
0.50
3.25
1.625
3.75
Maintenance
0.50
3.08
1.54
4
1.875
3.5
1.75
3.42
1.71
4.08
2.04
2
3.67
1.835
3.17
1.585
4.17
2.085
SUBTOTAL
3.865
4.515
4.325
3.955
4.805
0.05
0.19325
0.22575
0.21625
0.19775
0.24025
CATEGORY WEIGHT
Drag
0.30
4.17
1.251
3.67
1.101
3.08
0.924
3.83
1.149
3.25
0.975
Feasibility
0.30
3.5
1.05
4
1.2
3.83
1.149
3.75
1.125
4.17
1.251
CG/Weight Distribution
0.20
3
0.6
4.33
0.866
4
0.8
3.5
0.7
3.67
0.734
Control Surfaces
0.15
3.33
0.4995
3.08
0.462
3.75
0.5625
3.5
0.525
2.92
0.438
Transportability
0.05
2.33
0.1165
3.92
0.196
3.67
0.1835
3
0.15
4.17
0.2085
SUBTOTAL
CATEGORY WEIGHT
TOTAL SCORE
0.1
3.517
3.825
0.3517
3.559025
0.3825
3.5096
72
3.619
0.3619
3.6272
3.649
0.3649
3.3607
3.6065
0.36065
3.3972
Appendix E – Constraint Analysis Script
W=300; %weight (pounds)
Z=0; %altitude
(Feet)
Vknots=50;
%velocity (knots)
V=Vknots*1.68780986;
%velocity (feet per second)
[T,R,P,A,MU,TS,RR,PP,RM,QM,KK] = stdatmf(Z,1);
dh_dtminuet=200;
%rate of climb (ft/min) at sea level
dh_dt=dh_dtminuet/60;
%rate of climb (ft/sec) at sea level
dV_dt=0;
%acceleration
e=.9;
%oswalds effciency factor
AR=7;
%aspect ratio
Cdo=.005;
%skin friction drag coefficient (guess)
Clmax=1.6; %mas lift coefficient (guess)
Vstallknots= 40 %knots
Vstall=Vstallknots*1.68780986 %fps
L=W;
k=1/(pi*AR*e);
q=.5*R*V^2;
%Cl = L/(q*S);
%lift (pounds)
%induced drag coefficient
%dynamic pressure (psf)
%strait and level flight
W_S=[.05:.002:10];
T_Wsl= (q.*Cdo)./W_S+ (k./q).*W_S;
%stall
W_Sstall=.5.*R.*Vstall.^2.*Clmax
%climb
n=3;
%load factor
T_Wclimb=(q.*Cdo)./(W_S)+(k*n^2/q).*W_S+(1/V)*dh_dt;
%Landing
W_Slanding=.5.*R.*(.8.*Vstall).^2.*Clmax;
plot(W_Sstall,T_Wsl,'--.b',W_S,T_Wclimb,W_S,T_Wsl,W_Slanding,T_Wsl,'--.g');
title('Constraint Analysis ')
xlabel('W/S');
ylabel('T/W');
legend('Crusie','Climb','Stall','Landing')
73
Appendix F – Endurance Script
%Max Endurance for a prop occurs at minimum POWER
W=300; %wieght (pounds)
Z=3000; %altitude
(Feet)
Vknots=50;
%velocity (knots)
V=Vknots*1.68780986;
%velocity (feet per second)
dh_dtminuet=200;
%rate of climb (ft/min) at sea level
dh_dt=dh_dtminuet/60;
%rate of climb (ft/sec) at sea level
dV_dt=0;
%acceleration
e=.9;
%oswalds effciency factor
AR=7;
%aspect ratio
Cdo=.005;
%skin friction drag coefficient (guess)
Clmax=1.6; %mas lift coefficient (guess)
S=53.5714;
%planform area (ft^2) (guess)
[T,R,P,A,MU,TS,RR,PP,RM,QM,KK] = stdatmf(Z,1);
L=W;
%lift (pounds)
k=1/(pi*AR*e); %induced drag coefficient
q=.5*R*V^2;
%dynamic pressure (psf)
Cl = L/(q*S);
TR=Cdo.*q.*S+2.*k.*W^2./(q.*S); %thrust required (pounds)
D=TR;
Cd=D/(q*S);
W1=300; %pounds
W2=275; %pounds
np=.8; %propulsive efficiency
gpHP=.55; %specific fuel consuption (pounds/HP.hr)
gp=gpHP*(1/550); %specific fuel consuption (pounds/(ft.lb/sec).hr)
gpsec=gp*(1/3600); %specific fuel consuption (pounds/(ft.lb/sec).sec)
E=(np/gp)*(1/V)*(Cl/Cd)*log(W1/W2)
E2=(np/gp)*sqrt(2*R*S)*Cl^(3/2)*(1/Cd)*(1/sqrt(W2)-1/sqrt(W1))
Rfeet=(np/gpsec)*(Cl/Cd)*log(W1/W2);% range feet
R=Rfeet/5280
%range miles
Rknot=R*0.868976242 %range knotical miles
74
Appendix G – Power Script
W=300; %wieght (pounds)
Z=10000; %altitude
(Feet)
Vknots=[30:.5:70];
%velocity (knots)
V=Vknots*1.68780986;
%velocity (feet per secound)
dh_dtminuet=200;
%rate of climb (ft/min) at sea level
dh_dt=dh_dtminuet/60;
%rate of climb (ft/sec) at sea level
dV_dt=0;
%acceleration
e=.9;
%oswalds effciency factor
AR=7;
%aspect ratio
Cdo=.005;
%skin friction drag coefficient (guess)
Clmax=1.6; %mas lift coefficient (guess)
S=53.5714;
%planform area (ft^2) (guess)
[T,R,P,A,MU,TS,RR,PP,RM,QM,KK] = stdatmf(Z,1)
L=W;
%lift (pounds)
k=1/(pi*AR*e); %induced drag coefficient
q=.5.*R.*V.^2;
%dynamic pressure (psf)
%Cl = L/(q*S);
TR=Cdo.*q.*S+2.*k.*W^2./(q.*S);
PR=TR.*V;
PRhp=PR./550; %horesepower
figure(1)
plot(V,PR)
title('Power Required')
xlabel('Velocity (fps) ')
ylabel('PR (ft*lb/sec)')
figure(2)
plot(Vknots,PRhp)
title('HP Required')
xlabel('Velocity (knots) ')
ylabel('PR (HP)')
75
Appendix H – Constraint Analysis Script
Author: Mike
clear
clc
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%% Design Constraints %%%%%%
UNITS
%%%%
Vcruise=50;
%%%
knotts
%%%%
Vmax=70;
%%%
knotts
%%%%
MTOGW= 200;
%%%
lbs
%%%%
Range= 15;
%%%
natuical miles %%%%
Endurance= 8;
%%%
hours
%%%%
Ceiling= 10000;
%%%
ft
%%%%
Op_Altitude=3000;
%%%
ft
%%%%
Altitude or 2000 ft AGL)
Turn_Rate= 6;
%%%
degrees/second %%%%
Climb_Rate= 200;
%%%
ft/min
%%%%
Payload= 30;
%%%
lbs
%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
(@half fuel)
(Operational
(@ Sea Level)
%%%%%%%%%%%%%% Converts Units to English %%%%%%%%%%%%%%%%%%
Vcruise=Vcruise*1.6878098;
%%%%
ft/s %%%%
Vmax=Vmax*1.6878098;
%%%%
ft/s %%%%
Range=Range*6076.11548556;
%%%%
ft
%%%%
Climb_Rate=Climb_Rate/60;
%%%%
ft/s %%%%
Endurance=Endurance*3600;
%%%%
s
%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%% Planform Esitmation %%%%%%%%%%%%%%%%%%%
%%%%%%%%%% Assumptions:
Cl Cruise = 0.3
%%%%%%%%
%%%%%%%%%% rho @ sea level = 0.002378
slugs/ft %%%%%%%%
%%%%%%%%%% rho @ 10,000 ft = 0.001755
slugs/ft %%%%%%%%
%%%%%%%%%% Lift = Weight
%%%%%%%%
%%%%%%%%%% Lift = Cl*1/2*rho^2*S
%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Cl_cruise = 0.3;
%
Rho_sl = 0.002378;
%
Rho_10k = 0.001755;
%
S = MTOGW/(Cl_cruise*1/2*Rho_sl*Vcruise^2);
%
S_10k = MTOGW/(Cl_cruise*1/2*Rho_10k*Vcruise^2);
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%% Drag Calculation %%%%%%%%%%%%%%%%%%%
% Drag = (CDo)(1/2*rho*V^2*S)+2*k*W^2/(rho*V^2*S)
%
% Assumptions: e = .9
CDo = 0.02
AR = 10
%
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
e = .9;
%
CDo = 0.02;
%
AR = 10;
%
k=1/(pi*AR*e);
%
D = (CDo)*(1/2*Rho_sl*Vcruise^2*S)+2*k*MTOGW^2/(Rho_sl*Vcruise^2*S);
76
D_10k =
(CDo)*(1/2*Rho_10k*Vcruise^2*S)+2*k*MTOGW^2/(Rho_10k*Vcruise^2*S_10k);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%% Power Required %%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%% Straight and Level Flight %%%%%%%%%%%%%%%
%
%
% Power Required = (CDo)(1/2*rho*V^3*S)+2*k*W^2/(rho*V*S) %
% Assumptions: e = .9
CDo = 0.06
AR = 10
%
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
P = (CDo)*(1/2*Rho_sl*Vcruise^3*S)+2*k*MTOGW^2/(Rho_sl*Vcruise*S);
P_10k = (CDo)*(1/2*Rho_10k*Vcruise^3*S)+2*k*MTOGW^2/(Rho_10k*Vcruise*S_10k);
P_hp=P/550;
%%%% Converts to Horse Power%
P_10k_hp=P_10k/550;
%%%% Converts to Horse Power%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%% Power Required %%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%% Climb 200 ft/min
%%%%%%%%%%%%%%%%%%
%
%
% Rate of Climb = (Power Available - Power Required)/W
%
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Pclimb=Climb_Rate*MTOGW+P;
%
Pclimb_hp=Pclimb/550;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%% Max Endurance %%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%% Constant Speed
%%%%%%%%%%%%%%%%%%%%%%%%
%
%
% Range = (Prop_eff/Fuel_consump)(L/D)ln(W1/W2)
%
%
%
%Assumptions:108D2 enginge Fuel=1.75 gal/hour (10+ HP)
%
% Prop_eff = .85;
Avgas= 6.02 lb/gallon
%
% L/D at min drag conditions
%
% Aircraft composed of 50% fuel
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Prop_eff=.85;
%
Fuel_consump=1.75*6.02/3600/12/550;
%
L_D_minDrag=1/(2*(CDo*k)^(1/2));
%
Wfuel=MTOGWMTOGW/exp((Endurance*Vcruise*Fuel_consump/Prop_eff/(L_D_minDrag)));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%% Constraint Analysis %%%%%%%%%%%%%%%%%%
%
%
%
%
%%%%%%%%%%%%%%%%%
Climb
%%%%%%%%%%%%%%%%%%%%%%%%
% Assumptions: load factor, n = 4
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
W_S=[.05:.002:5];
%
77
n=4;
%
q_10k=(1/2*Rho_10k*Vcruise^2);
%
T_W=(q_10k*CDo)./W_S+(k*n^2/q_10k).*W_S+(1/Vcruise)*Climb_Rate;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%
Stall
%%%%%%%%%%%%%%%%%%%%%%%%
% Assumptions: Vstall =
35 knotts
Cl max = 1.3
%
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Vstall=35;
%
Cl_max=1.3;
%
%%%%%%%%%%%%%% Converts Units to English %%%%%%%%%%%%%%%%%
Vstall=Vstall*1.6878098;
%%%%
ft/s %%%
%
W_S_stall=0.5*Rho_10k*Vstall^2*Cl_max;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%
Landing
%%%%%%%%%%%%%%%%%%%%%%%
% Assumptions: V_landing = 1.2(V_stall)
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
W_S_landing=.5*Rho_sl*(1/1.2*Vstall)^2*Cl_max;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
plot(W_S,T_W,'k--')
%
hold on
%
line([W_S_stall W_S_stall],[min(T_W) max(T_W)],'Color','g')
line([W_S_landing W_S_landing],[min(T_W) max(T_W)],'Color','b')
xlabel('W/S');
%
ylabel('T/W');
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%
PLotting
%%%%%%%%%%%%%%%%%%%%%%%
text(1.05*W_S_stall,max(T_W),'Stall')
%
text(.8*W_S_landing,min(T_W),'Landing')
%
text(0.5,2,'Climb')
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
78
1 ArcturusUAV: Photos. http://www.arcturus-uav.com/photos.php
2 ScanEagle Unmanned Aerial Systems. Retrieved from Defense Update: http://www.defenseupdate.com/products/s/scaneagle.htm
3 Military.com: Entertainment. RQ-2 Pioneer UAV.
http://tech.military.com/equipment/view/89670/rq-2-pioneer-uav.html
4 GlobalSecurity.org. www.globalsecurity.org/intell/systems/shadow.htm
5 James F. Marchman, III. Introduction to Aerodynamics & Aircraft Performance. Blacksburg:
A-1 Copies, 2006
6 Unmanned Aircraft Systems Roadmap, 2005-2030; Department of Defense
7 “Establishment of Models and Data Tracking for Small UAV Reliability.” Marinos
Dermentzoudis. June, 2004. Naval Postgraduate School, Monterey California. Thesis
8 Raymer, Daniel P. Aircraft Design: A Conceptual Approach. 3rd Edition. Reston: American
Institute of Aeronautics and Astronautics, 1999.
9 Sinton, Darrol. The Design of the Aeroplane. Reston: American Institute of Aeronautics and
Astronautics, 2001.
10 Hepperle, Martin. JavaFoil. <http://www.mh-aerotools.de/airfoils/jf_applet.htm>
11 Desert Aircraft, DA-150 Engine, 31 Oct. 2007,
http://www.desertaircraft.com/engines_detail.php?Page=DA-150
12 Lightning Aircraft Inc, 150D2-B Engine, 31 Oct. 2007,
http://www.lightningaircraft.com/150D2-B.htm
13 Lightning Aircraft Inc, 250D2 Engine, 31 Oct. 2007,
http://www.lightningaircraft.com/250D2.htm
14 Sullivan UAV Products, Alternators – Face Type, 31 Oct. 2007,
http://www.sullivanuav.com/products/alfa_5and10watt.html
15 Sullivan UAV Products, Starter, 31 Oct. 2007,
http://www.sullivanuav.com/products/starters.html
16 Drela, Mark and Harold Youngren. AVL. http://web.mit.edu/drela/Public/web/avl/
79