Exploration of Airfoil Sections to Determine the Optimal Airfoil for Remote Controlled Pylon Racing by Michael DeRosa An Engineering Project Submitted to the Graduate Faculty of Rensselaer Polytechnic Institute in Partial Fulfillment of the Requirements for the degree of MASTER OF ENGINEERING Major Subject: MECHANICAL ENGINEERING Approved: _________________________________________ Dr. Ernesto Gutierrez-Miravete, Project Adviser Rensselaer Polytechnic Institute Hartford, Connecticut April 2012 (For Graduation May 2012) © Copyright 2012 by Michael R. DeRosa All Rights Reserved ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................. iv LIST OF FIGURES .............................................................................................................v LIST OF SYMBOLS……………………………………………………………….…….vi ACKNOWLEDGMENT.................................................................................................. viii ABSTRACT. .................................................................................................................... xix 1. Introduction…………………………………………………………….……………...1 1.1 Background………………………...………………………………….……………...1 1.2 Problem Description……………………..…………………………….……………...3 1.3 Airfoil Selection Matrix………………………………………………….…………...4 1.4 Prior Work and Research on Pylon Race Simulations………………...……………...6 2. Methodology……………………………….………………………………………….7 2.1 Assumptions and Simplifications……………….……………………...…………….7 2.2 Reynolds Number Calculation…………….…….……………...………….………….9 2.3 Airfoil Drag Coefficient Calculation Using XFOIL…………………....…..……….11 2.4 Entire Plane Drag Coefficient Calculation………………..…………….….……….14 2.5 Governing Differential Equations………………………………….…….....……….16 2.6 Determination of Top Airfoil Candidates for Race Simulation…....……...…..…….20 2.7 Airfoil race simulation in Maple……………….……………………..……..…...….24 3. Results……………………………………………………………….….……...…….28 3.1 Maximum Speed and Maximum Loss of Speed in Turns………………...……...….28 3.2 Maple Race Simulation Results…………………………...……….………….....….29 3.3 Airfoil Polar Interpretations…………………………….………….…………….….31 3.4 XFOIL 𝐶𝑝 Plot Comparison……………………………….……….………….....….35 3.5 Validation of Results………….……………….…………………………….....…….36 3.6 Implications of Moment Coefficient……………………………….……...……..….38 4. Discussion and Conclusion…….….…………………………………..………….….40 4.1 Summary of High Level Results………………..…..………….……..………….….40 4.2 Recommendations for Further Results…………………..….….……..……………..40 5. References………………………………………………………...……..…..……….42 iii 6. Appendix……………….……………….………………………………..…….…….43 6.1 Email from Jett .40 Engine Manufacturer Concerning Actual Engine Power Output…………………………………………………………………….….…….…….43 6.2 Email from Dr. Martin Hepperle on Calculating Thrust on Engine/Propeller Combination…………………………………………………………………..….……....43 6.3 XFOIL Input Parameters…………….……………………………….…..………….44 6.4 Output of JavaProp Program on Engine/Propeller Combination…………..………..44 6.5 Screenshots of Maple Calculation of Maximum Possible Velocity and Maximum Speed Loss in Turns for NACA 66-012 Airfoil…………………………………..……...44 6.6 Maple Screenshots of Maple Calculation of Time and Velocity for Start Line to Take Off and Around First Turn for NACA 66-012 Airfoil………………………….…..…....47 6.7 XFOIL Polar Accumulation Results (PACC command) for NACA 66-012 Airfoil for α from -1 to 5 Degrees…………………………………………………………..…..…...50 iv LIST OF TABLES Table1 Airfoil Selection Matrix……………………………………………..….……........5 Table 2 Tabulations of drag coefficients for top 12 performing airfoils………..…….....16 Table 3 Maximum possible speed and speed loss in turns for each airfoil candidate.......23 Table 4 Simulated race for NACA 66-012 airfoil…………………..…………….……..26 Table 5 Maximum possible speed and speed loss in turns for each airfoil candidate…...28 Table 6 Overall airfoil race simulation results…………………..……..…………….......30 v LIST OF FIGURES Figure 1 A typical Quickie 500 pylon racing airplane………………….………………....2 Figure 2 Pylon race course………………………………...…………….………………...2 Figure 3 NACA 66-012 Airfoil………………………………………….………………...3 Figure 4 Clark Y Airfoil…………………………………………………..…..………......4 Figure 5 Race course layout in dashed blue lines for race simulation.…….……………...7 Figure 6 The paneling of a NACA 66-012 airfoil………………………….………….....12 Figure 7 Coefficient of Lift Input into XFOIL………………………………..………....13 Figure 8 XFOIL output for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776……….……….....13 Figure 9 Pressure coefficient distribution for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776………………………………………………………………….………..……14 Figure 10 Estimation of drag contribution of components in Q-500 pylon racer…...…...15 Figure 11 Initial JavaProp inputs for engine/propeller…………………………….….....17 Figure 12 Estimation of an 8.8x8.75 in. propeller as JavaProp inputs……………..…....18 Figure 13 Thrust vs. Velocity Results as produced by JavaProp…………………..…….19 Figure 14 Maple output for top speed of NACA 66-012 airfoil at 60 seconds….............20 Figure 15 Maple plot for velocity vs. time for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776…………………………………………………………………….……..…....21 Figure 16 Velocity of NACA 66-012 airfoil after 50 ft. radius turn at top speed….…....21 Figure 17 Velocity from start line to first turn for NACA 66-012 airfoil…………...…...24 Figure 18 Initial velocity for a particular portion of the race simulation…………..….....25 Figure 19 Velocity and time for first turn around pylon #1………………………..…….25 Figure 20 𝐶𝐿 as a function of angle of attack for 12 airfoils…………………………......32 Figure 21 Drag polars for al 12 airfoils…………………………………...…………......33 Figure 22 Laminar bucket of NACA 66-012 airfoil with flaps……………...………......34 Figure 23 Lift curve for flapped NACA 66-012 airfoil…………………………...……..35 Figure 24 𝐶𝑝 Plots for NACA 66-012 and MH-17 airfoils at 𝐶𝐿 = 0.563277………......36 Figure 25 NACA 66-012 Wind Tunnel Data from Theory of Wing Sections………...…36 Figure 26 Velocity vs. time result of race simulation by Dr. Hepperle…………...…......37 Figure 27 Velocity vs. time result of race simulation for NACA 66-012 airfoil…….…..38 vi Figure 28 Airfoil pitching moment coefficients as a function of 𝐶𝐿 for the 12 airfoils......39 vii LIST OF SYMBOLS 𝑅𝑒 dimensionless Reynolds number 𝜌∞ free stream air density (𝑚3 ) 𝑉∞ free stream air velocity (𝑠𝑒𝑐) 𝑥 airfoil chord length (𝑚) 𝜇∞ free stream air absolute viscosity (𝑚∙𝑠𝑒𝑐) 𝐿 whole plane lift force (N) 𝑆 wing area (𝑚2 ) 𝐶𝐿 dimensionless whole plane lift coefficient 𝑚 mass of airplane (kg) 𝑔 gravitational constant (𝑠𝑒𝑐 2 ) 𝐴 centripetal acceleration around turns (𝑠𝑒𝑐 2 ) 𝑟 turn radius (𝑚) 𝐶𝐷 dimensionless whole plane drag coefficient 𝐶𝑑 dimensionless airfoil drag coefficient 𝐶𝐷,𝑖 dimensionless wing induced drag coefficient 𝑒 dimensionless Oswald span efficiency factor 𝐴𝑅 dimensionless wing aspect ratio 𝑑𝑉 𝑘𝑔 𝑚 𝑘𝑔 𝑚 𝑚 𝑚 𝑑𝑡 change in velocity with respect to time (𝑠𝑒𝑐 2 ) 𝐿 thrust from engine/propeller combination (N) 𝐷 whole plane drag force (N) 𝐷𝐶𝐿=0.018776 whole plane drag force at lift coefficient of 0.018776 (N) 𝐶𝐷,𝐶𝐿=0.018776 dimensionless whole plane drag coefficient of 0.018776 𝐷𝐶𝐿=0.563277 whole plane drag force at lift coefficient of 0.563277 (N) 𝐶𝐷,𝐶𝐿=0.563277 dimensionless whole plane drag coefficient of 0.563277 𝐶𝑃 dimensionless power coefficient of engine/propeller combination 𝑑 propeller diameter (𝑚) 𝑉 actual airplane velocity (𝑠𝑒𝑐) 𝑚 viii 𝐶𝑝 dimensionless pitching moment of airfoil ix ACKNOWLEDGMENT I want to thank my grandfather for instilling a lifelong interest in model airplanes when I was young, which ultimately put me on a path to pursuing an education and employment in the aerospace engineering field. I also would like to thank my grandmother for strongly encouraging me to pursue a Master’s in Engineering. Dr. Ernesto Gutierrez- Miravete and Dr. Martin Hepperle provided invaluable assistance and advice during the course of this project. Last, but not least, I want to thank my wonderful girlfriend Liz for her encouragement during the times when this project seemed very daunting. x ABSTRACT In remote controlled pylon racing, the Quickie 500 class of airplanes has 500 square inches of wing area, and with a Jett 0.40 cubic inch displacement methanol fueled engine, has a top speed of about 150 miles per hour. They are flown 10 times around an oval course marked by 3 pylons, for a total of 2 to 2.5 miles. These planes lose a significant amount of speed in the 30 G’s turns. This project will explore several airfoils to find the optimal airfoil that will minimize the loss of speed of turns while maximizing top speed during straight and level flight. Airfoil selections include the popular NACA 66-012 and airfoils designed by Martin Hepperle, Michael Selig, Clark, and Richard Eppler. XFOIL airfoil analysis program will provide analytical drag coefficient data for each airfoil. These airfoil drag coefficient will be used to calculate the finite wing drag for level and turning flights. The blending of two airfoil sections to obtain the best of both will be explored as well as flaps to increase lift during the turns. Finally, using Maple and Excel, the airfoil sections will be run through a simulated race, and the one that completes the race in the shortest amount of time is the optimal airfoil for Quickie 500 pylon racing. xi 1. Introduction 1.1 Background Radio controlled pylon racing has been around since the 1960’s, and now there are 3 distinct classes: sport Quickie 500 (120 mph), AMA Quickie 500 (150 mph), and Quarter 40 (180-200 mph). The only difference between sport and AMA Quickie 500 is that the former uses the 1.25 horsepower Thunder Tiger Pro .40 engine, while the latter uses a 1.8 horsepower Jett .40 engine. Both are powered by methanol fuel. The .40 signifies the size of the engines, at 0.40 cubic inch total displacement. The Jett is able to gain a 0.55 horsepower advantage through the use of advanced timing. This project focuses pylon racers in the AMA Quickie 500 class powered by the Jett engine. There is always a search for an edge to design these planes to fly as fast as possible, while remaining within rules. The official rules posted on the Academy of Model Aeronautics’ contest rules website [1] impose the restriction on Q-500 airplane wings: Minimum projected wing area of 500 square inches Wingspan range of 50-52 inches Minimum wing thickness of 1.1875 inches The purpose of these rules is to enforce equality among each racer. It also keeps the speeds down which allows the planes to maintain structural integrity in turns. There are also rules imposed on the fuselage size and tail thickness, but they have been mostly optimized over the years. The tail is typically a V-tail configuration, and they have been optimized for size and stability. Any further optimization on the tail and fuselage will yield an insignificant speed benefit through the reduction of drag. Because the wing is the largest contributor of drag during racing, there is room for improvement, particularly in the airfoil section. Figure 1 below shows a typical Q-500 racer, a Viper 500, which is sold by Great Planes. Note the constant chord wing and the V-tail. 1 Figure 1 A typical Quickie 500 pylon racing airplane Hence, the Q-500 rules provide sufficient constraint on design that lends the airplane to be an ideal airfoil test bed. The wing area is fixed at 500 square inches, and the minimum span is 50 inches, which leads to an aspect ratio of 5. With an aspect ratio of 5, the chord is 10 inches. With a minimum airfoil thickness of 1.1875 inches, the airfoil thickness to chord ratio, t/c is fixed at 11.875%. The chord and t/c are important inputs for the selection of airfoils. In pylon racing, four racers take off at the same time, fly around a course ten times, and the first plane that crosses the finish line wins. Pilot skill being equal, the fastest plane wins, obviously. Being that this is not a perfect world, and pilot skill does vary, having a fast plane certainly does help. A typical racing course layout and dimensions are laid out below in Figure 2. Figure 2 Pylon race course 2 As seen in Figure 2, a typical course has 3 pylons, with 2 being 100 feet apart, while the third is 475.5 ft. from the centerline of the 2. The perimeter of the resultant triangle is 951 feet, which translates to 2 miles when flown for 10 laps in a counter clockwise direction. It is an inefficient flight path to fly a triangular course as shown, but rather, an oval flight path is more typical. The overall distance covered is closer to 2.5 miles. The start/finish line is 100 ft. from the twin pylons. All planes take off within 0.5 seconds of each other and immediately turn at the far pylon. The way the course is designed, there are 2 turns per lap, for a total of 20 turns between straight and level flight. Because there are significant penalties if planes turn inside the pylons, this scenario will not be considered here. 1.2 Problem Description While entering the 50 ft. radius turns at 150 mph, the airplane experiences 30G’s of centripetal acceleration. This results in the wings having to adjust to a higher angle of attack in order to create more lift to keep the plane in place while turning. An increase of drag from a higher angle of attack will slow the plane down during turns. The most popular airfoil for pylon racing, the laminar NACA 66-012, in Figure 3, typically loses 10-15 miles per hour in the turns, as exhibited in the radar gun tests. This airfoil is desirable for low drag in straight and level flight, at the cost of high drag in the turns. Figure 3 NACA 66-012 Airfoil In contrast, a flat bottomed Clark Y airfoil, in Figure 4 below, has a higher lift to drag ratio due to its higher camber. The high L/D ratio of the Clark Y reduces loss of speed in the turns. However, its high form drag will not allow it to attain sufficient speed in the straightway. 3 Figure 4 Clark Y Airfoil There are several different newer airfoils created by Hepperle, Selig, and Eppler that may have the benefits of both higher speeds in straight ways and lower speed loss in turns. Particularly, Hepperle and Eppler have designed airfoils specifically for pylon racing, and they are good candidates. A formal evaluation of all possible pylon racing airfoils has not been done to this date. A wing comprised of two different types of airfoils may have the best of both worlds, as well as flaps deflected at small angles during the turns. Those configurations need to be assessed as well. The anticipated speed benefit of using the optimal airfoil over the NACA 66-012 for this application will mostly likely be small. Even 2-3 mph speed benefit coming out of the turns is helpful, which will allow the plane to jump ahead of the competition. 1.3 Airfoil Selection Matrix Table 1 below is the airfoil selection matrix. The first column is the airfoil name, the second shows the actual shape as produced in XFOIL, and the third column is the percent maximum thickness with respect to chord length. Even though the AMA contest rules limit the minimum thickness to 11.875%, thinner airfoils, such as the Clark Y, are included and tested for reference purposes. If the best performing airfoil is indeed too thin, it will be disregarded, as it cannot be used in Quickie 500 pylon racers. 4 Airfoil Airfoil Shape Airfoil Thickness NACA 66-012 (Baseline) 12.000% Clark Y 11.706% NACA 64-012 11.962% NACA 64-212 11.964% MH-27 11.990% E-220 11.469% S-8064 12.338% S-8052 11.895% MH-16 12.127% MH-17 12.127% MH-18 11.145% MH-18B 11.734% Combination of NACA66-012 and Clark Y (0.5 Interpolation)- MD1 Combination of Clark Y and NACA66-012 (0.5 Interpolation)MD2 11.650% 11.654% Combination of NACA66-012 and Clark Y (0.25 Interpolation)- MD3 11.772% Combination of NACA66-012 and Clark Y (0.75 Interpolation)- MD4 11.612% Combination of NACA66-012 and MH-18B (0.5 Interpolation)MD5 Combination of NACA66-012 and MH-17 (0.5 Interpolation)MD6 11.815% 12.062% Table1 Airfoil Selection Matrix 5 The airfoil coordinates for the NACA 66-012, Clark Y, Selig S-8052, and the Eppler E-220 airfoils were found in the University of Illinois Aerospace Engineering department (UUIC Airfoil Database) [2]. Coordinates for airfoils designed by Dr. Martin Hepperle, designated by “MH-XX” are located in the pylon racing page on his MH Aero Tools website [3]. The Viper 500 pylon racer, shown in Figure 1 above, uses the Selig S-8064, which Dr. Michael Selig personally designed for this plane alone. The coordinates were found in a different page in the University of Illinois Aerospace Engineering department website [4]. Finally, the “MD-X” airfoils are entirely new airfoils created in XFOIL by interpolating shapes between 2 existing airfoils. 1.4 Prior Work and Research on Pylon Race Simulations In his MH Aero Tools website [3], Dr. Hepperle performed race simulations for his own airfoils, as well as existing airfoils of the time. He explored various aspects that effect race times, such as retractable landing gear, tail plane layout, wing aspect ratio, power of various racing engines, wing surface quality, and employing flaps in turns. Various paths around a race course and the resultant race times were also explored by him. Dr. Hepperle has not performed any simulations on the popular NACA 66-012 airfoils, nor looked into the use of flaps to improve the turning performance of this particular airfoil. Utilizing flaps for the NACA 66-012 in turns is one of the focuses of this project. He also did not consider the effect a blended airfoil wing has on the performance of a pylon racer. This project will attempt to fill in this knowledge gap in the performance of blended airfoil wings, particularly to improve the race times of the widely used NACA 66-012 airfoil. 6 2. Methodology 2.1 Assumptions and Simplifications The dashed lines in blue in Figure 5 below are the chosen race course to be used for the race simulation. Race course dimensions were obtained from the Academy of Model Aeronautics contest rulebook for 426 level pylon racing [1]. The twin pylons (pylons #2 and 3) are 100 ft. apart and pylon #1 is 475.5 ft. from the midpoint of the twin pylons. The start line (black dashed line) is 100 ft. (30.48 m.) from the twin pylons so that the plane has to cover only 375.5 ft. (114.45 m.) to initiate a turn around pylon #1 on the first lap. It assumes that the pylon racer flies just outside the pylons in turns. The racing simulation takes into account the 475.5 ft. of straight and level flight between sets of pylons and 50 ft. radii semicircular turning flight. Figure 5 Race course layout in dashed blue lines for race simulation For simplification, the race course simulation will be as follows: Start line to first turn in 114.45 meters (375.5 ft.) 19 instances of 50 ft. radius turn in 47.88 meters (157.0796 ft.) preceding a 144.93 meter level flight (475.5 ft.) 7 Final 50 ft. radius turn in 47.88 meters (157.0796 ft.) during lap #10. Back to start/finish line from previous turn in 30.48 meters (100 ft.) For further simplification, sea level air conditions were used, namely air density of 𝑘𝑔 𝑘𝑔 1.2250 𝑚3 and absolute viscosity value of 1.7894𝑥10−5 𝑚∗𝑠𝑒𝑐 were taken from Anderson [5]. Since the racing airfoils were later found to have maximum speeds in the range of 𝑚𝑖 146-157 ℎ𝑟 , 150 𝑚𝑖 ℎ𝑟 is an acceptable speed assumption for the Reynolds number and 𝐶𝐿 for all airfoils tested. This speed was obtained from radar gun data of a NACA66-012 pylon racer top velocity, which is set as our baseline airfoil. Reynolds number was calculated for that speed only to obtain all airfoil data in XFOIL. Whole plane coefficient of lift calculations for both flight regimes were based on the speed of 150 𝑚𝑖 ℎ𝑟 for all airfoils. In reality, Reynolds number does change with velocity, which has an effect on the drag coefficient of airfoils. If you look at any wind tunnel data, you will see that drag coefficients do decrease with increasing velocity due to the delaying of the laminar to turbulent transition. Reynolds number will increase with velocity, especially during the initial acceleration from zero speed to the first turn, but velocity changes will be much smaller after this point. To be able to compare each airfoil on an equal basis, a constant Reynolds number was used at all portions of the race. Also for the same reason, the straight and level flight regime and turning flight regime lift coefficients are the same for all airfoils. The wing is treated as the sole contributor of lift since lift from tail surfaces and fuselage is insignificant when compared to the wing. Also, this allows each wing to be compared on an equal basis. Since the minimum wing (airfoil) thickness is specified by the AMA rules to be 11.875%, any airfoils that are too thin will typically be rejected, with few exceptions for comparison purposes. Some airfoils are required to be fixed at a certain angle of attack, either positive or negative, to produce lift during straight and level. This is permissible since one can easily set a wing incidence (angle of attack) to trim it for high speed flight. This is true for cambered airfoils which have negative angles of attack at zero lift. At 8 very small lift coefficients required for high speed flight, it is necessary for the airfoils to be at a negative angle of attack. For symmetrical airfoils, such as a NACA 66-012 airfoil, zero angles of attack produces zero lift. Flaps dramatically increase airfoil camber, and lift as a result. For this reason, flapped airfoils require less angle of attack to produce the same amount of lift as their unflapped counterparts. For the higher lift regime of turning flight, flaps are beneficial in increasing lift for a particular airfoil with a small gain of angle of attack. As long as the angle of attack for turning flight for a flapped airfoil is greater than the straight and level unflapped angle of attack, the flapped configuration is acceptable. In some cases, so much lift is created with high angle of flap deflection, that the required angle of attack is actually less than the unflapped airfoil in high speed flight. Such flap angles are rejected since it does not make sense for a wing to lower its angle of attack while transitioning from low to high lift regimes. For flapped airfoils, the drag coefficient during high speed flight is assumed to be equal to their unflapped counterparts, due to the assumption of similar airfoil shape when flaps are fully retracted. Realistically, there will be a slight increase in drag due to gaps and breaks in the airfoil contours where the flap hinges are located. In his own airfoil simulations, Dr. Hepperle assumed a 10% increase in airfoil drag for 0.25 seconds to account for the ¼ roll into and out of turns. Overall, the increase of race time due to this effect is only 0.2 seconds [3]. Since it affects airfoils approximately equally, and since it has a very slight influence on lap times, the drag increase during rolling into and out of turns will be ignored. The above assumptions are required for the simplification of race simulations and to keep all airfoils on equal basis for the ease of performance comparisons. 2.2 Reynolds Number Calculation Radar gun data for a pylon racer with a NACA 66-012 (or slight variation of) show a maximum speed of 150 𝑚𝑖 ℎ𝑟 m (67.056 sec). The 2011-2012 AMA contest rules specify a minimum wing area of 500 𝑖𝑛2 (0.32258 𝑚2 ), and wingspan range of 50-52 inches [1]. As stated before in the introduction section, for a 500 square inch wing, a 50 in. span was selected to set the chord to 10 inches (0.254 m). With the maximum wing thickness allowable set to 1.1875 inches by AMA rules, this allows a broader selection of airfoils as 9 set by a maximum thickness of 11.875%. Standard sea level absolute viscosity value of 𝑘𝑔 𝑘𝑔 1.7894𝑥10−5 𝑚∙𝑠𝑒𝑐 and air density of 1.2250 𝑚3 [5] were selected for the Reynolds number calculation. The Reynolds number equation was obtained from Anderson [5] as follows: 𝜌∞ 𝑉∞ 𝑥 𝑅𝑒 = (2.1) 𝜇∞ 𝑘𝑔 𝑚 ∗ 67.056 𝑠𝑒𝑐 ∗ 0.245𝑚 𝑚3 𝑘𝑔 1.7894𝑥10−5 𝑚 ∙ 𝑠𝑒𝑐 1.2250 𝑅𝑒 = 𝑅𝑒 = 1.17𝑥106 This value was used as the default Reynolds number in calculating the drag coefficients and polars for each airfoil. Next, we must calculate the overall plane lift coefficient for straight and level flight at 150 𝑚𝑖 ℎ𝑟 m (67.056 sec). The equation for lift from Anderson [5] is given here: 1 𝐿 = 2 𝜌∞ 𝑉∞2 𝑆𝐶𝐿 (2.2) Rearranging: 𝐶𝐿 = 1 2 𝐿 (2.3) 𝜌∞ 𝑉∞2 𝑆 For steady, level flight, lift is equal to weight. Since the AMA rule book allows a minimum weight of 3.75lbs (1.7009714 kg), this weight is used, since it reflects the ideal weight of pylon racers. The final equation for the coefficient of lift during steady, level flight at maximum speed is: 𝑚𝑔 𝐶𝐿 = 1 (2.4) 𝜌 𝑉2𝑆 2 ∞ ∞ 1.7009714𝑘𝑔 ∗ 9.8067 𝐶𝐿 = 𝑚 𝑠𝑒𝑐 2 𝑘𝑔 1 𝑚 2 2 2 ∗ 1.2250 𝑚3 ∗ (67.056 𝑠𝑒𝑐 ) ∗ 0.32258𝑚 𝐶𝐿 = 0.018776 During turns, the wings (and the plane) undergo centripetal acceleration, which the wing must counteract by creating more lift to oppose the centrifugal force in turns. It does so by pitching itself to increase the angle of attack to create more lift in the direction 10 of the center of the turn. Equation 2.5 describes the centripetal acceleration which the plane must counteract in 50 ft. (15.24 m) turns: 𝐴= 𝐴= 2 𝑉∞ (2.5) 𝑟 𝑚 (67.056 𝑠𝑒𝑐 )2 15.24𝑚 𝐴 = 295.0464 𝑚 𝑠𝑒𝑐 2 𝑚 With gravitational acceleration being 9.8067 𝑠𝑒𝑐 2, this shows that centripetal acceleration is 30 times gravitational acceleration, or 30G’s. This comes down to the fact that the plane is effectively 30 times heavier in the turns, so the wing must increase the lift force to compensate. The plane creates this lift in the horizontal direction when the wing is banked nearly 90 degrees during turns. The overall coefficient of lift in turns is given in equation 2.6: 30∗𝑚𝑔 𝐶𝐿 = 1 (2.6) 𝜌 𝑉2𝑆 2 ∞ ∞ 30 ∗ 1.7009714𝑘𝑔 ∗ 9.8067 𝐶𝐿 = 𝑚 𝑠𝑒𝑐 2 𝑘𝑔 1 𝑚 2 ∗ 1.2250 3 ∗ (67.056 ) ∗ 0.32258𝑚2 2 𝑠𝑒𝑐 𝑚 𝐶𝐿 = 0.563277 Of course there is lift opposing gravity to keep the plane in the air. This is ignored, since it will be small compared to lift that counteracts the centripetal force in turns. In actuality, the wing is not banked a full 90 degrees, so some vertical component of lift is used to keep the plane in the air during turns. Also, the fuselage is shaped to produce a lifting surface in the vertical direction, and the tail can be trimmed to pitch the plane’s nose upwards in turns. For simplification, the coefficients of lift and drag are assumed to be constant throughout the turns, even though speeds do decrease during turns. 2.3 Airfoil Drag Coefficient Calculation Using XFOIL The XFOIL airfoil analysis program, designed by Dr. Mark Drela of MIT, was used to calculate the drag coefficient of each airfoil at both lift coefficients. The program uses viscous flow equations to estimate the coefficients of lift and drag of an airfoil based on its shape. Next, the airfoil coordinate files were loaded into XFOIL, and paneled them with 280 panels. The XFOIL instructions [6] recommended keeping the angles between 11 panels to less than 10 degrees, and that requirement was consistently met with 280 panels. Panels are analogous to a mesh, where viscous differential equations were solved for. Figure 6 shows the paneling of a NACA 66-012 airfoil. The number of panels and maximum angle between panels are shown in the upper left corner. Figure 6 The paneling of a NACA 66-012 airfoil Flaps are added to any airfoil in the geometry design menu by indicating the chord station of the flap hinge, the vertical station of the flap hinge, and the flap deflection in degrees. Creation of new airfoils that are interpolations of two existing airfoils is done in the geometry design menu. This operation is performed by inputting the coordinate files of two existing airfoils and the interpolation factor between 0 and 1. The higher the interpolation factor, the closer the shape of the resulting airfoil is to the base airfoil, which is the first airfoil input into XFOIL. Airfoils created using this operation is designated with MD-x. In the operation menu, the Reynolds number is set to1.17𝑥106 , the viscous equations option turned on (visc command), the constant Re number option (type 1) is turned on, and the number of iterations to solve for a lift coefficient is set to 200 or 300. Ncrit, the laminar to turbulent transition criteria number is left to the default value of 9, which Martin Hepperle used in the calculation of his airfoils [3]. Figure 7 shows how the straight and level coefficient of lift of 0.018776 is input into XFOIL. 12 Figure 7 Coefficient of Lift Input into XFOIL Figures 8 and 9 are XFOIL outputs for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776. The laminar to turbulent transition location for each side is show at “transition at x/c” in the form of the normalized chord location. The angle of attack value is given after “a”, CL is the input coefficient of lift, and Cm and CD are the corresponding moment and total drag coefficient at that particular lift coefficient. This drag coefficient value is used for calculating drag at straight and level flight between turns. Drag coefficient is further broken down into drag due to skin friction coefficient (CDf), and pressure drag (CDp). The plot in Figure 9 also reiterates the coefficient values and the angle of attack. Most importantly, it shows the pressure coefficient distribution over both surfaces, which is a function of air velocity over the wing. The dashed line is the invisicid (theoretical) plot, and the solid lines are the plot from the viscous calculations. Figure 8 XFOIL output for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776 13 Figure 9 Pressure coefficient distribution for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776 For each airfoil, corresponding drag coefficients are calculated and tabulated for 𝐶𝐿 = 0.018776 (straight and level flight between turns) and 𝐶𝐿 = 0.563277 (turning flight). 2.4 Entire Plane Drag Coefficient Calculation In order to calculate the whole plane drag at the two flight regimes, we must calculate the whole wing 𝐶𝐷 then proceed to calculate the whole plane 𝐶𝐷 . Since turning flight is dominated by induced drag, this drag must be included with the airfoil profile drag. Equations 2.7 and 2.8 calculate the whole wing 𝐶𝐷 using equations from Anderson [5].Hepperle [3] assumed the Oswald span efficiency factor, e, to be 0.9, which he felt gave good results for induced drag calculations. With a 500 square inch rectangular wing with chord of 10 inches, the wing aspect ratio (AR) is easily calculated to be 5. 𝐶𝐷 = 𝐶𝑑 + 𝐶𝐷,𝑖 𝐶𝐷 = 𝐶𝑑 + 𝐶𝐿2 𝜋𝑒𝐴𝑅 NACA 66-012 airfoil has 𝐶𝑑 = 0.00528 at 𝐶𝐿 = 0.018776 and 𝐶𝑑 = 0.01089 at 𝐶𝐿 = 0.563227, and the whole wing drag is calculated as follows: 14 (2.7) (2.8) 𝐶𝐷,𝐶𝐿=0.018776 0.0187762 = 0.018776 + 𝜋 ∗ 0.9 ∗ 5 𝐶𝐷,𝐶𝐿=0.018776 = 0.005305 𝐶𝐷,𝐶𝐿=0.563277 = 0.01089 + 0.5632772 𝜋 ∗ 0.9 ∗ 5 𝐶𝐷,𝐶𝐿=0.563277 = 0.033333 Note that the turning flight 𝐶𝐷 is more than six times than the straight and level 𝐶𝐷 , even though the airfoil profile 𝐶𝑑 differs by only 2x. This indicates that induced drag dominates the turning flight mode. Next, we must find the whole plane drag coefficients for both regimes of flight. In his comparison of pylon racing airfoils, Hepperle [3] estimated the wing drag to be 27% in level flight and 76% in turning flight as shown in Figure 10 below. To calculate both whole plane 𝐶𝐷 ′𝑠, the wing 𝐶𝐷 is multiplied by the inverse of each respective percentage. For NACA 66-012 airfoil, the whole plane drag coefficients are 𝐶𝐷 = 0.019648 at 𝐶𝐿 = 0.018776 and 𝐶𝐷 = 0.043859 at 𝐶𝐿 = 0.563227. These drag coefficient values are inputs into the Maple routine that simulates a race. Note that with the inclusion of drag from the fuselage, tail and landing gear, the turning flight 𝐶𝐷 is 2.2 times the level flight 𝐶𝐷 . Figure 10 Estimation of drag contribution of components in Q-500 pylon racer [3] Table 2 is a tabulation of drag coefficient results for the top 12 airfoils. The whole plane drag coefficients in the last two columns are used as inputs for the race simulation created in Maple. 15 Airfoil MH-17 @ 5 Degrees 15% Span Flaps MH-17 MH-18B S8064 NACA 66-012 @ 10 Degrees 15% Span Flaps Combination of NACA66-012 and MH-18B (0.5 Interpolation)- MD5 Combination of NACA66-012 and MH-17 (0.5 Interpolation)- MD6 Combination of NACA66-012 and Clark Y (0.5 Interpolation)- MD1 E-220 NACA 66-012 (Baseline) MH-18 Clark Y CD @ CL = CD @ CL = 0.018776 0.563277 Whole Wing Whole Wing Whole Plane CD @ CL = CD @ CL = CD @ CL = 0.018776 0.563277 0.018776 0.004395 0.027513 0.016278 0.004395 0.029013 0.016278 0.004725 0.028383 0.017500 0.004995 0.028803 0.018500 Whole Plane CD @ CL = 0.563277 0.00437 0.00437 0.00470 0.00497 0.00507 0.00657 0.00594 0.00636 0.036201 0.038175 0.037346 0.037899 0.00528 0.00602 0.005305 0.028463 0.019648 0.037451 0.00490 0.00964 0.004925 0.032083 0.018241 0.042215 0.00487 0.00994 0.004895 0.032383 0.018129 0.042609 0.00543 0.00568 0.00528 0.00637 0.00810 0.00558 0.00579 0.01089 0.00538 0.00538 0.005455 0.005705 0.005305 0.006395 0.008125 0.028023 0.028232 0.033333 0.027823 0.027823 0.020203 0.021129 0.019648 0.023685 0.030092 0.036872 0.037147 0.043859 0.036609 0.036609 Table 2 Tabulations of drag coefficients for top 12 performing airfoils 2.5 Governing Differential Equations In order to calculate the maximum speed and speed loss in turns for each airfoil in Maple, a differential equation describing the physics of flight must be created first. Starting from F=ma, the following differential equation is derived: 𝑑𝑉 𝑚 𝑑𝑡 = 𝑇 − 𝐷 (2.9) In its derivative form, the equation states that velocity is a function of forces acting on the airplane. Velocity is constant when all forces (T-D) on the plane are zero, or when the drag force equals the thrust from the engine/propeller combination. In equations 2.10 and 2.11, the equation for drag was obtained from Anderson [5] to calculate drag for both regimes of flight for the all airfoils. Note that 𝐶𝐷 is the whole plane drag coefficient. 1 𝐷𝐶𝐿=0.018776 = 2 𝜌∞ 𝑉∞2 𝑆𝐶𝐷,𝐶𝐿=0.018776 1 𝐷𝐶𝐿=0.563277 = 2 𝜌∞ 𝑉∞2 𝑆𝐶𝐷,𝐶𝐿=0.563277 (2.10) (2.11) The other variable that must be accounted for is thrust from the engine/propeller combination, which also varies as a function of velocity. Dub Jett, the sole producer of AMA Quickie 500 engines, stated that the expected power of the Jett 0.40 cubic inch displacement engine is 1.6-1.8 horse power [Appendix 6.1]. With a handheld optical tachometer, it can spin an 8.8 in. diameter prop with an 8.75 in. pitch up to 18,000 revolutions per minute on the ground. 16 After an email exchange with Dr. Hepperle [Appendix 6.2], he determined the most effective manner to obtain thrust as a function of velocity was to use his JavaProp program on his MH Tools website. Initial engine/propeller inputs for JavaProp include ground RPM of 18,000, 8.8 in. diameter propeller with a 1 inch diameter spinner, 1.8 horsepower, and near zero speed, as seen in Figure 11. Note that all units have been converted to their respective metric units. Figure 11 Initial JavaProp inputs for engine/propeller The initial engine power value of 1.7 hp produced results that were too slow compared to real life data, while 1.8 hp produced results that correlate with real life data very well. The next step is to estimate the propeller airfoil and angle of attack that produces results that matches real life data for a pylon racer equipped with a NACA 66012 airfoil. Figure 12 below is the estimation of propeller airfoils of an 8.8 in. diameter and 8.75 in. pitch racing propeller. 17 Figure 12 Estimation of an 8.8x8.75 in. propeller as JavaProp inputs After calculating the engine/propeller efficiency, power, thrust, and velocity, JavaProp outputs data as shown in the Appendix. Dr. Hepperle advised to check the coefficient of power, 𝐶𝑃 against a known velocity to ensure the result matches. Zero speed (or close to zero) was used. Equation 2.12 is the 𝐶𝑃 formula provided by Dr. Hepperle. 𝑃 𝐶𝑃 = 𝜌∗𝑛3 ∗𝑑5 𝐶𝑃 = (2.12) 1,269.67𝑊 𝑘𝑔 𝑟𝑒𝑣 1.2250 3 ∗ (300 𝑠𝑒𝑐 )3 ∗ 0.22352𝑚5 𝑚 𝐶𝑃 = 0.06896 This power coefficient value matches very well with the JavaProp output power coefficient of 0.073635 at zero speed. The reason for the difference is that one cannot input zero velocity as input in the first page for JavaProp, so the lowest allowable value of 0.5 𝑚 𝑠𝑒𝑐 was used. This validates the JavaProp results. JavaProp gave the thrust result for each velocity, as seen in the plot in Figure 13. 18 Thrust vs. Velocity for 1.8 HP Engine and 8.8 x 8.75 in. Propeller 30 Thrust (N) 25 20 15 10 5 0 0 20 40 60 80 Velocity (m/sec) -5 100 120 Figure 13 Thrust vs. Velocity Results as produced by JavaProp The sixth order trend line seen in the plot above gives thrust as a function of velocity, shown in equation 2.13 below. 𝑇 = −4.70258202𝑥10−11 ∗ 𝑉 6 + 4.71680931𝑥10−9 ∗ 𝑉 5 + 1.82170086𝑥10−6 ∗ 𝑉 4 − 3.42822861𝑥10−4 ∗ 𝑉 3 + 1.63054071𝑥10−2 ∗ 𝑉 2 − 0.231096635 ∗ 𝑉 + 23.7462140 (2.13) Now, the complete governing differential equation can be constructed by substituting 2.10, 2.11, and 2.13 into 2.9 to develop the governing equations for both flight regimes. Equation 2.14 is the straight and level flight with 𝐶𝐿 = 0.018776 and equation 2.15 is the governing equation for turning flight with 𝐶𝐿 = 0.563277. 𝑑𝑉 𝑚 𝑑𝑡 = 𝑇 − 𝐷𝐶𝐿=0.018766 (2.14) 𝑇 = −4.70258202𝑥10−11 ∗ 𝑉 6 + 4.71680931𝑥10−9 ∗ 𝑉 5 + 1.82170086𝑥10−6 ∗ 𝑉 4 − 3.42822861𝑥10−4 ∗ 𝑉 3 + 1.63054071𝑥10−2 ∗ 𝑉 2 − 0.231096635 ∗ 𝑉 + 23.7462140 𝐷𝐶𝐿=0.018776 = 1 𝜌 𝑉 2 𝑆𝐶 2 ∞ ∞ 𝐷,𝐶𝐿=0.018776 𝐷𝐶𝐿=0.018776 = 0.003882056752𝑉 2 𝑑𝑉 𝑚 𝑑𝑡 = 𝑇 − 𝐷𝐶𝐿=0.563277 19 (2.15) 𝑇 = −4.70258202𝑥10−11 ∗ 𝑉 6 + 4.71680931𝑥10−9 ∗ 𝑉 5 + 1.82170086𝑥10−6 ∗ 𝑉 4 − 3.42822861𝑥10−4 ∗ 𝑉 3 + 1.63054071𝑥10−2 ∗ 𝑉 2 − 0.231096635 ∗ 𝑉 + 23.7462140 𝐷𝐶𝐿=0.563277 = 1 𝜌 𝑉 2 𝑆𝐶 2 ∞ ∞ 𝐷,𝐶𝐿=0.563277 𝐷𝐶𝐿=0.563277 = 0.008696889865𝑉 2 𝑑𝑥 𝑑𝑡 =𝑉 (2.16) The position of the plane, in meters, is the derivative of velocity, as shown in Equation 2.16. For Equations 2.14 and 2.15, the initial condition of any starting velocity is determined by the velocity at the end of the preceding stage of the race. For example, the initial velocity is the speed at the end of the straightway before the plane turns, and is the initial condition of the governing equation that describes velocity behavior at that turn. At the start line, initial velocity is zero. The initial position condition is always zero for each stage of the race, since we are concerned with only the distance covered by that stage of the race. More details on this method will be covered in later sections. 2.6 Determination of Top Airfoil Candidates for Race Simulation All of the above equations and drag coefficients are input into Maple for each airfoil to determine the top speed of the plane and the maximum loss of speed in turns from top speed. The top speed is determined by entering the whole plane drag coefficient for 𝐶𝐿 = 0.018776 with zero initial speed and applying equation 2.15 in Maple and querying the output at 60 seconds. Figure 14 is the Maple output for the NACA 66-012 airfoil at 60 seconds, and Figure 15 is the velocity vs. time plot produced by Maple. Figure 14 Maple output for top speed of NACA 66-012 airfoil at 60 seconds 20 Figure 15 Maple plot for velocity vs. time for NACA 66-012 airfoil at 𝐶𝐿 = 0.018776 At 60 seconds, a plane equipped with a NACA 66-012 airfoil will reach a top speed 𝑚 𝑚𝑖 𝑚𝑖 of 66.72 𝑠𝑒𝑐, or 149.25 ℎ𝑟 , which agrees with the radar gun data of 150 ℎ𝑟 . From the plot, you will see that velocity stabilizes at 15-20 seconds and is constant at 60 seconds. To determine the maximum speed loss in turns, Equation 6.15 was solved in Maple with the initial velocity set to the top speed for this particular airfoil. In the case of the 𝑚 NACA 66-012 airfoil, the initial speed is 66.72 𝑠𝑒𝑐, and will decrease during the turn. The distance covered in a 50 ft. (15.24m) radius turn, from zero initial distance, is 157.0796 ft. (47.88 m). Figure 16 Velocity of NACA 66-012 airfoil after 50 ft. radius turn at top speed 21 The velocity after a 50 ft. radius turn is shown in Figure 16, and does not show the exact metric equivalent, 47.88 meters, ordered by time. The closest distance is used, since it is only off by 0.01 meters, or 0.39 inches, which is sufficiently accurate. From 𝑚 this distance, one can read the corresponding velocity, 59.73 𝑠𝑒𝑐, and time to complete the turn, 0.762 sec. Since the actual distance is not available, the closest distance and corresponding time and velocity are used. Time is within 0.001 seconds and velocity is 𝑚 𝑚𝑖 accurate within 0.01 𝑠𝑒𝑐, or 0.02 ℎ𝑟 , which is sufficiently accurate for this purpose. The speed loss is simply the difference of the velocity going into the turn (maximum speed) 𝑚 𝑚𝑖 and the velocity after a 50 ft. radius turn, which is 6.99 𝑠𝑒𝑐, or 15.64 ℎ𝑟 . All maximum velocities and speeds are tabulated for all 32 airfoil candidates in Table 3 below. 22 Maximum Possible Speed (m/sec) 66.72 58.23 66.49 66.43 67.23 65.30 67.88 66.83 67.20 70.30 70.30 70.30 63.05 68.93 Speed After 50 ft. radius turn (m/sec) 59.73 56.58 60.04 61.28 60.96 60.70 62.07 61.39 61.78 63.52 63.97 64.06 59.48 62.87 Maximum Possible Speed Loss in Turns (m/sec) 6.99 1.65 6.45 5.15 6.27 4.60 5.81 5.44 5.42 6.78 6.33 6.24 3.57 6.06 66.72 59.85 6.87 149.25 15.37 NACA 66-012 @ 5 Degrees 10% Span Flaps NACA 66-012 @ 7.5 Degrees 10% Span Flaps NACA 66-012 @ 10 Degrees 10% Span Flaps NACA 66-012 @ 2.5 Degrees 15% Span Flaps 66.72 59.97 6.75 149.25 15.10 66.72 60.04 6.68 149.25 14.94 66.72 60.11 6.61 149.25 14.79 66.72 59.83 6.89 149.25 15.41 NACA 66-012 @ 5 Degrees 15% Span Flaps NACA 66-012 @ 7.5 Degrees 15% Span Flaps NACA 66-012 @ 10 Degrees 15% Span Flaps NACA 66-012 @ 2.5 Degrees 20% Span Flaps 66.72 59.95 6.77 149.25 15.14 66.72 60.02 6.70 149.25 14.99 66.72 61.46 5.26 149.25 11.77 66.72 59.78 6.94 149.25 15.52 NACA 66-012 @ 5 Degrees 20% Span Flaps NACA 66-012 @ 7.5 Degrees 20% Span Flaps NACA 66-012 @ 10 Degrees 20% Span Flaps Combination of NACA66-012 and Clark Y (0.5 Interpolation)- MD1 Combination of Clark Y and NACA66-012 (0.5 Interpolation)- MD2 Combination of NACA66-012 and Clark Y (0.25 Interpolation)- MD3 Combination of NACA66-012 and Clark Y (0.75 Interpolation)- MD4 Combination of NACA66-012 and MH-18B (0.5 Interpolation)- MD5 Combination of NACA66-012 and MH-17 (0.5 Interpolation)- MD6 66.72 59.90 6.82 149.25 15.26 66.72 59.98 6.74 149.25 15.08 66.72 61.56 5.16 149.25 11.54 66.18 61.31 4.87 148.04 10.89 65.47 60.88 4.59 146.45 10.27 67.88 61.43 6.45 151.84 14.43 60.30 57.87 2.43 134.89 5.44 68.15 61.02 7.13 152.45 15.95 68.26 60.98 7.28 152.69 16.28 Airfoil NACA 66-012 (Baseline) Clark Y NACA 64-012 NACA 64-212 MH-27 E-220 S8064 S8052 MH-16 MH-17 MH-17 @ 2.5 Degrees 15% Span Flaps MH-17 @ 5 Degrees 15% Span Flaps MH-18 MH-18B NACA 66-012 @ 2.5 Degrees 10% Span Flaps Maximum Possible Speed (mi/hr) 149.25 130.26 148.73 148.60 150.39 146.07 151.84 149.49 150.32 157.26 157.26 157.26 141.04 154.19 Maximum Possible Speed Loss in Turns (mi/hr) 15.64 3.69 14.43 11.52 14.03 10.29 13.00 12.17 12.12 15.17 14.16 13.96 7.99 13.56 Table 3 Maximum possible speed and speed loss in turns for each airfoil candidate 23 2.7 Airfoil race simulation in Maple Based on the highest attained velocities and minimal loss of velocity in turns, the top 12 airfoil candidates were selected for race simulations in Maple. The NACA66-012 airfoil was selected as the baseline airfoil for comparison purposes, as well as the Clark Y. Each portion of the race is measured in meters, for ease of use. To reiterate the race simulation from section 2.1, the race simulation is as follows: Start line to first turn in 114.45 meters (375.5 ft.) 19 instances of 50 ft. radius turn in 47.88 meters (157.0796 ft.) preceding a 144.93 meter level flight (475.5 ft.) Final 50 ft. radius turn in 47.88 meters (157.0796 ft.) during lap #10. Back to start/finish line from previous turn in 30.48 meters (100 ft.) The total length covered in the race simulation outlined above is 3.856 km (12,651.6 ft. or 2.3691 miles). The perimeter of the triangle marked by the pylons over 10 laps is exactly 2 miles; hence it is referred to as the 2 mile course. Since this is an impossible flight path, the above race simulation is a much more realistic representation of a race. The straight and level flight in between turns is governed by equation 2.14, and turning flight is governed by equation 2.15., so there are two distinct equations and solutions in a Maple worksheet. In Maple, each stage of the race simulation is calculated for velocity and time for each corresponding length in a similar manner as calculating velocity and time after a 50 ft. radius turn in Section 2.6. For example, in Figure 17 below, with zero initial velocity, it takes 4.273 seconds to reach the first pylon from the start line, as seen in the box. The distance covered is 114.45 meters, but time and velocity was read from the closest distance, 114.4295 meters. Figure 17 Velocity from start line to first turn for NACA 66-012 airfoil 24 Velocity at the end of this portion of the race is set as the initial velocity into the governing equation that describes turning flight around pylon #1, as seen in Figure 18 below. The first box shows where the velocity at the end of the preceding portion of the race is entered as an initial condition (ic3). The second box is the Maple output which validates the initial velocity, where time is zero, at the beginning of this portion of the race. Figure 18 Initial velocity for a particular portion of the race simulation Since this portion of the race is a turn around pylon 1, equation 2.15 is used to describe this flight regime, which covers a distance of 47.88 meters. Figure 19 below shows the velocity and time at the end of the first turn. 47.885 meters is the closest to the actual distance of 47.88 meters; therefore velocity and time is read from this distance. The velocity a thousandth of a second before and after the velocity highlighted in the box 𝑚 is well within 0.001 𝑠𝑒𝑐 . Figure 19 Velocity and time for first turn around pylon #1 This process continues until the velocities stabilize at about lap #4. Stabilization occurs when the velocity at the beginning of a straight and level flight regime is equal to the previous straight and level flight regime since the loss of speed in turns is now constant. This can be seen in lap 3 in Table 4 below for a simulated race for a NACA66012 airfoil. Distance in meters is used to find the closest velocity at the end of this 25 portion of the race and the time it takes the plane to cover this distance. Velocity is then converted into miles per hour. Speed at the end of each piece of the race is recorded in Table 4 below, and the change of speed in turns is the difference of speed going into and out of turns. From the table, you can easily see that a plane equipped with a NACA 66-012 airfoil reaches a 𝑚𝑖 𝑚𝑖 maximum speed of 143.34 ℎ𝑟 at the end of straight and level flight and loses 13.29 ℎ𝑟 in 𝑚𝑖 turns. The maximum speed in a race is lower than the maximum speed of 149.25 ℎ𝑟 for a plane with this airfoil because the race course is not sufficiently long enough to allow the plane to reach a steady state velocity. The maximum speed loss in turns during a race is 𝑚𝑖 lower than the maximum possible 15.64 ℎ𝑟 because maximum possible speed has not been attained. Piece # 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 Lap # 1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4 5 5 5 5 6 6 6 6 7 7 7 7 8 8 8 8 9 9 9 9 10 10 10 10 10 Location Start Line to Pylon 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to 1 Around Pylon 1 Pylon 1 to Pylon 2 Around Pylons 2 and 3 Pylon 3 to Finish Line Distance (m) 114.45 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 144.93 47.88 30.48 Speed (m/sec) 49.39 49.91 61.74 56.83 63.69 57.96 64.03 58.15 64.08 58.18 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 64.09 58.19 60.09 Time (sec.) 4.273 0.964 2.549 0.811 2.380 0.791 2.355 0.788 2.351 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 2.350 0.787 0.515 Distance(ft.) 375.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 475.5000 157.0796 100.0000 Speed (mi/hr) 110.48 111.65 138.11 127.13 142.47 129.65 143.23 130.08 143.34 130.14 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 143.37 130.17 134.42 Table 4 Simulated race for NACA 66-012 airfoil 26 Speed Loss in Turns (mi/hr) 10.98 12.82 13.15 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 13.20 The time for each piece of the race is summed to be the total race time. This process is repeated for the top 12 airfoil candidates to obtain the total race time for each for the overall airfoil performance comparison. 27 3. Results 3.1 Maximum Speed and Maximum Loss of Speed in Turns Maximum Possible Speed (m/sec) 66.72 58.23 66.49 66.43 67.23 65.30 67.88 66.83 67.20 70.30 70.30 70.30 63.05 68.93 Speed After 50 ft. radius turn (m/sec) 59.73 56.58 60.04 61.28 60.96 60.70 62.07 61.39 61.78 63.52 63.97 64.06 59.48 62.87 Maximum Possible Speed Loss in Turns (m/sec) 6.99 1.65 6.45 5.15 6.27 4.60 5.81 5.44 5.42 6.78 6.33 6.24 3.57 6.06 66.72 59.85 6.87 149.25 15.37 NACA 66-012 @ 5 Degrees 10% Span Flaps NACA 66-012 @ 7.5 Degrees 10% Span Flaps NACA 66-012 @ 10 Degrees 10% Span Flaps NACA 66-012 @ 2.5 Degrees 15% Span Flaps 66.72 59.97 6.75 149.25 15.10 66.72 60.04 6.68 149.25 14.94 66.72 60.11 6.61 149.25 14.79 66.72 59.83 6.89 149.25 15.41 NACA 66-012 @ 5 Degrees 15% Span Flaps NACA 66-012 @ 7.5 Degrees 15% Span Flaps NACA 66-012 @ 10 Degrees 15% Span Flaps NACA 66-012 @ 2.5 Degrees 20% Span Flaps 66.72 59.95 6.77 149.25 15.14 66.72 60.02 6.70 149.25 14.99 66.72 61.46 5.26 149.25 11.77 66.72 59.78 6.94 149.25 15.52 NACA 66-012 @ 5 Degrees 20% Span Flaps NACA 66-012 @ 7.5 Degrees 20% Span Flaps NACA 66-012 @ 10 Degrees 20% Span Flaps Combination of NACA66-012 and Clark Y (0.5 Interpolation)- MD1 Combination of Clark Y and NACA66-012 (0.5 Interpolation)- MD2 Combination of NACA66-012 and Clark Y (0.25 Interpolation)- MD3 Combination of NACA66-012 and Clark Y (0.75 Interpolation)- MD4 Combination of NACA66-012 and MH-18B (0.5 Interpolation)- MD5 Combination of NACA66-012 and MH-17 (0.5 Interpolation)- MD6 66.72 59.90 6.82 149.25 15.26 66.72 59.98 6.74 149.25 15.08 66.72 61.56 5.16 149.25 11.54 66.18 61.31 4.87 148.04 10.89 65.47 60.88 4.59 146.45 10.27 67.88 61.43 6.45 151.84 14.43 60.30 57.87 2.43 134.89 5.44 68.15 61.02 7.13 152.45 15.95 68.26 60.98 7.28 152.69 16.28 Airfoil NACA 66-012 (Baseline) Clark Y NACA 64-012 NACA 64-212 MH-27 E-220 S8064 S8052 MH-16 MH-17 MH-17 @ 2.5 Degrees 15% Span Flaps MH-17 @ 5 Degrees 15% Span Flaps MH-18 MH-18B NACA 66-012 @ 2.5 Degrees 10% Span Flaps Maximum Possible Speed (mi/hr) 149.25 130.26 148.73 148.60 150.39 146.07 151.84 149.49 150.32 157.26 157.26 157.26 141.04 154.19 Maximum Possible Speed Loss in Turns (mi/hr) 15.64 3.69 14.43 11.52 14.03 10.29 13.00 12.17 12.12 15.17 14.16 13.96 7.99 13.56 Table 5 Maximum possible speed and speed loss in turns for each airfoil candidate 28 Table 5 is a reiteration of Table 3 from section 2.6. The NACA 66-012 airfoil is selected as the baseline airfoil, as it is the most common airfoil used for racing today. Since it is the lowest speed airfoil, the Clark Y was chosen as the high lift airfoil for the race simulation in Maple for comparison purposes. As for the other 10 airfoils, the first priority was given to the highest top speed, and the second priority was given to the minimal loss of speed. Only 12 out of 32 airfoils were selected for the race simulation in Maple, as simulating a race is a time consuming process that takes 20-30 minutes per airfoil. Because the goal of this project is to determine the airfoils with the lowest race times, airfoils that produce high race times were not incorporated. For example, the MD4 airfoil produced a top speed of only 135 𝑚𝑖 ℎ𝑟 . It is for this reason that it is not a competitive airfoil. Conversely, even though the MH-18 airfoil has a top speed of only 141 𝑚𝑖 ℎ𝑟 , it is a viable candidate due to its low maximum speed loss in turns of 8 𝑚𝑖 ℎ𝑟 second only to the Clark Y airfoil. As with any selection process in the field of Engineering, one must find the best compromise between two or more selection metrics. A balance between top speed and minimal loss of speed in turns during the airfoil selection process must be found. Upon completion of a various race simulations, it can be determined that airfoil top speed is a greater driver of race times than maximum loss of speed in turns. 3.2 Maple Race Simulation Results 29 , Cd @ CL = 0.018776 Cd @ CL = 0.563277 Max Race Speed (mi/hr) Max Speed Loss in Turns (mi/hr) Race Time (sec) MH-17 With 5 Degrees 15% Span Flaps 0.00437 0.00507 151.13 11.65 62.146 MH-17 0.00437 0.00648 150.66 12.64 62.509 MH-18B 0.00470 0.00594 148.55 11.39 63.567 S-8064 0.00497 0.00636 146.65 10.98 63.814 NACA 66-012 With 10 Degrees 15% Span Flaps 0.00528 0.00602 144.75 9.95 64.396 MD5- Combination of NACA66-012 and MH-18B (0.5 Interpolation) 0.00490 0.00964 146.12 13.38 64.484 MD6- Combination of NACA66-012 and MH-17 (0.5 Interpolation) 0.00487 0.00994 146.21 13.65 64.485 MD1- Combination of NACA66-012 and Clark Y (0.5 Interpolation) 0.00543 0.00558 143.95 9.28 64.607 E-220 0.00568 0.00579 142.34 8.84 65.203 NACA 66-012 0.00528 0.01089 143.37 13.20 65.619 MH-18 0.00637 0.00538 138.38 6.93 67.668 Clark Y 0.00810 0.00538 126.49 3.27 70.189 Airfoil Airfoil Shape Table 6 Overall airfoil race simulation results Table 6 above shows the outcome of the Maple airfoil simulation results, ordered by the lowest to highest race times for the 12 airfoil candidates selected. The MH-17 with 15% span flaps during turns is the clear winner in this simulation. Even the MH-17 airfoil without flaps is less than 0.4 seconds slower than its flapped counterpart, the complexity of the flap installation alone is not worth the 0.4 second. 30 It is surprising to note that the NACA 66-012 baseline airfoil performance is near the bottom, albeit slower by only 3.473 seconds than the MH-17 with 5 degrees 15% span flaps. Another commonly used airfoil in pylon racing, the S-8064, outperformed the NACA 66-012 airfoil by 1.8 seconds. The performance of the NACA 66-012 airfoil can be improved by 1.2 seconds by including 15% span flaps at 10 degrees during turns. This added benefit of flaps may not be worth the complexity of flap installation for some airplane builders. Another way to improve the NACA 66-012 airfoil is by blending it with a higher lift airfoil (MH-18B, Clark Y) to create a new airfoil. One can also improve the 66-012 airfoil by incorporating a wing with 3 various airfoil sections consisting of a smooth transition between them. Raymer [7] suggested using washout for constant airfoil wings to lower the angle of attack of outboard wings. Washout is the twist of the wing where the outboard sections are set to lower angles of attack than the inboard section. Washout results in two things: it prevents the wing tips from stalling first, which will cause a violent stall and to make a more elliptical lift distribution. Such lift distribution allows lift to naturally decrease towards the wing tips. With a more elliptical lift distribution, the effect of induced drag is lower. Rather than reducing the angle of attack towards the wing tips, one can design a blended airfoil wing with a higher lift airfoil, such as a MH-18B in the inner 1/3, transition to a MD-5, and finally to NACA 66-012 in the following manner: Inboard 1/3: MH-18B Mid 1/3: MD-5 airfoil, which is a blend of NACA 66-012 and MH-18B Outboard 1/3: NACA 66-012 The beauty of calculating the section 𝐶𝐷 of a wing blended in the above manner is that the average 𝐶𝐷 of each airfoil will be very close to the drag coefficient of the airfoil that is the 50% blend of the inner and outer airfoils. In other words, the 𝐶𝐷 of the blended airfoil, MD-5, can represent a wing comprised of those 3 airfoils or of just the MD-5 airfoil only. 3.3 Airfoil Polar Interpretations XFOIL has the capability to create polars for a given range of angles of attack and lift coefficients through the polar accumulation command (pacc) in the operations menu. 31 The XFOIL output polar text file was read into an Excel spreadsheet and plotted. An example of the XFOIL polar output file for the NACA 66-012 airfoil is found in section 6.7 in the Appendix. NACA 66-012 Clark Y MH-18 MH-18B S-8064 E-220 MD-1 MD-5 MH-17 MD-6 CL = 0.018776 CL = 0.563277 1.40 Lift Coefficient 1.30 1.20 1.10 1.00 0.90 0.80 0.70 0.60 0.50 0.40 0.30 0.20 0.10 0.00 -4 -3 -2 -1-0.10 0 -0.20 -0.30 1 2 3 4 5 6 7 8 9 Angle of Attack (Degrees) Figure 20 𝐶𝐿 as a function of angle of attack for 12 airfoils Figure 20 above shows the coefficient of lift as a function of α for the top 11 performing airfoils and the Clark Y. It can be seen that the Clark Y airfoil produces higher 𝐶𝑙 at all α than all airfoils. Even the Clark Y must be kept at a negative α during the high speed 𝐶𝐿 , marked by purple dashed lines. Since it is at a higher absolute α at low 𝐶𝐿 , its 𝐶𝑑 will be higher. You will also see that the NACA 66-012 is a relatively low-lift airfoil, and requires higher α than a majority of airfoils in turning flight regime, marked by a blue dashed line. This is why its 𝐶𝐷 is higher in this flight regime than the other airfoils. Conversely, the Clark Y airfoil requires low α during turning flights, which leads to lower 𝐶𝐷 in that flight regime. 32 10 Since XFOIL is incapable of solving for coefficients at and near stall α, a sudden drop in the 𝐶𝐿 curve at higher α will not be seen. You can see that the Clark Y, MH-17, MH-18, and MH-18B lift slope flatten out at 9-10 degrees α as stall is being approached. These high lift airfoils are excellent candidates for the inboard airfoil section of a blended airfoil wing, since they will stall first. Since the NACA 66-012 is known to have somewhat more abrupt stall behavior, it will be ideal for the outboard section of a blended airfoil wing. The NACA 66-012 curve does not start to flatten out at 9-10 degrees α, since it is not yet close to stalling. The next figure, 21, shows the drag polar for those 12 airfoils run through the race simulation. It shows 𝐶𝑑 as a function of 𝐶𝑙 . 𝐶𝐿 for high speed flight is marked by blue dashed lines on the left, and 𝐶𝐿 in turns is marked by orange dashed lines on the right. NACA 66-012 Clark Y MH-17 MH-18 MH-18B S-8064 E-220 MD-1 MD-5 MD-6 CL = 0.018776 CL = 0.563277 Drag Coefficient 0.024 0.023 0.022 0.021 0.020 0.019 0.018 0.017 0.016 0.015 0.014 0.013 0.012 0.011 0.010 0.009 0.008 0.007 0.006 0.005 0.004 0.003 0.002 -0.3 -0.2 -0.1 0.0 Lift Coefficient 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 Figure 21 Drag polars for al 12 airfoils From the drag polar on the left, one can easily see why the Clark Y airfoil is the slowest in high speed flight regime, but yet has the minimal loss of speed in turns. Its 33 1.4 1.5 𝐶𝑑 is the highest at high speed, and is lowest during turning flight. On the other hand, the NACA 66-012 loses the most speed in turns because of high 𝐶𝑑 at the 𝐶𝐿 for turning flight. From the plot, it can be observed that the MH-17 airfoil has the lowest 𝐶𝑑 at low 𝐶𝐿 , and yet has significantly lower 𝐶𝑑 in the turns than the NACA 66-012 airfoil. The NACA 66-012 airfoil has high 𝐶𝑑 at higher 𝐶𝑙 because of the airfoil’s inherent laminar bucket. This laminar bucket is a 𝐶𝑙 range where 𝐶𝑑 does not increase due to strong laminar flow attachment. The plot in Figure 22 below illustrates the laminar bucket. 0 Degrees Flaps 2.5 Degrees Flaps 5 Degrees Flaps 7.5 Degrees Flaps 10 Degrees Flaps -2.5 Degrees Flaps CL = 0.563277 0.03500 Drag Coefficient 0.03000 0.02500 0.02000 0.01500 0.01000 0.00500 Lift Coefficient -0.2 0.00000 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Figure 22 Laminar bucket of NACA 66-012 airfoil with flaps The unflapped NACA 66-012 airfoil emerges out of the bucket at approximately 𝐶𝐿 = 0.3, so it is out of the laminar bucket and into higher 𝐶𝐷 regime at the turning flight regime 𝐶𝐿 = 0.563277, marked by the black dashed line. Increasing flap angle shifts the laminar bucket to the right until the 10 degree flap is just inside the laminar bucket at 𝐶𝐿 = 0.563277, which is why flaps minimize speed loss in turns. For 34 1.0 reference, the orange curve represents -2.5 degree flaps, which shifts the laminar bucket to the left. 0 Degrees Flaps 2.5 Degrees Flaps 5 Degrees Flaps 7.5 Degrees Flaps 10 Degrees Flaps -2.5 Degrees Flaps CL = 0.563277 1.0 0.9 Lift Coefficient 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 -7 -6 -5 -4 -3 -2 0.0 -1 0 -0.1 1 2 3 4 5 6 7 8 9 10 Angle of Attack (Degrees) -0.2 Figure 23 Lift curve for flapped NACA 66-012 airfoil As seen in Figure 23 above, the reason flaps lower 𝐶𝑑 at 𝐶𝐿 = 0.563277 from lowering α required to attain this lift coefficient. The unflapped NACA 66-012 airfoil (dark blue) requires just over 5 degrees α to maintain turning flight, while the 10 degrees flaps requires less than 1 degree. This lowers the amount of exposed surface area of the airfoil relative to the free steam flow, and thus lowers 𝐶𝑑 during turns. 3.4 XFOIL 𝑪𝒑 Plot Comparison At the turning flight regime 𝐶𝐿 = 0.563277, the MH-17 airfoil has lower 𝐶𝑑 than the NACA 66-012. The plot in Figure 24 below offers an explanation for this difference in 𝐶𝑑 . 35 11 Figure 24 𝐶𝑝 Plots for NACA 66-012 and MH-17 airfoils at 𝐶𝐿 = 0.563277 Since the coefficient of pressure is related to the local velocity of air over the airfoil, the spike near the leading edge of the NACA 66-012 airfoil on the left indicates high local velocity. This translates to higher drag coefficient at 𝐶𝐿 = 0.563277 3.5 Validation of Results Figure 25 NACA 66-012 Wind Tunnel Data from Theory of Wing Sections [8] 36 Wind tunnel data for NACA 66-012 is found in pages 662-663 in [9], copied as Figure 25 above. At Re = 3,000,000, 𝐶𝑑 ≈ 0.004 at 𝐶𝐿 = 0.018776. At this Reynolds number and 𝐶𝐿 , XFOIL predicted 𝐶𝐷 = 0.00368, an 8.7% difference. XFOIL predicted 𝐶𝑑 = 0.00841 at 𝐶𝐿 = 0.563277, which is 7.0% lower than the published 𝐶𝑑 = 0.009 at the same 𝐶𝐿 . The difference could be due to some viscous effects not accounted for in XFOIL or even in the wind tunnel data itself. The data was produced in the 1940’s, when wind tunnel technology and measurement was not as advanced as modern methods. This discrepancy between both sets of data is expected to be similar for all airfoils, which still allow relative comparisons to be made using XFOIL results. There is relatively good agreement between XFOIL and published wind tunnel data, thus validating XFOIL results. The lowest race time achieved with a NACA 66-012 airfoil (or a slight variation of) is 63 seconds with a course layout similar to the one used in the airfoil simulations. The Maple simulation predicted this airfoil to complete the race in 65.6 seconds, a good agreement at 4.16% difference. In the race simulation, the plane initiates turns when pylons are reached, but in reality, the turns are initiated before the pylons are reached. This reduces the flight distance covered, and accounts for the 2.6 second difference. All in all, the race simulation ensures the race course is similar between all airfoils for equal comparison. As posted in his pylon racing page of his MH Aero Tools website [3], Dr. Hepperle also completed a similar race simulation, with results shown in Figure 26 below. Figure 26 Velocity vs. time result of race simulation by Dr. Hepperle [3] 37 Figure 27 Velocity vs. time result of race simulation for NACA 66-012 airfoil Velocity vs. time results between Figures 26 and 27 show similar trends, which validates the race simulation. As mentioned before, the velocities stabilize after the 4th lap, so the amplitude of the sine graphs are the same after the 4th lap. 3.6 Implications of Moment Coefficient The airfoil pitching moment coefficient as a function of 𝐶𝐿 for each of the 12 airfoils is plotted in Figure 28 below. The vertical dashed line represents the high speed flight regime 𝐶𝐿 = 0.018776 and the vertical dashed line on the right is the turning flight regime 𝐶𝐿 = 0.563277. From the plot, you will see that the NACA 66-012 airfoil pitch moment coefficient remains nearly zero at all 𝐶𝐿 , which indicates that lift from small tail is sufficient in counteracting this moment. On the other end of the spectrum, the Clark Y produces significant pitching moment at all 𝐶𝐿 , which would require a larger tail to counteract this moment. A larger tail will add to the drag penalty of the whole plane. The MH-17 airfoil does have more pitching moment than the NACA 66-012, and might require a larger tail than a plane equipped with a NACA 66-012 airfoil. The difference in moment coefficient isn’t as great as the Clark Y, but in reality even the smaller horizontal tails are large enough, because they are usually designed for safe operation during takeoff and landing conditions [3]. 38 NACA 66-012 Clark Y MH-17 MH-18 MH-18B S-8064 E-220 MD-1 MD-5 MD-6 CL = 0.018776 CL = 0.563277 0.050 0.040 0.030 0.010 0.000 -0.05 -0.010 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50 0.55 -0.020 -0.030 -0.040 -0.050 -0.060 -0.070 -0.080 -0.090 -0.100 Lift Coefficient Figure 28 Airfoil pitching moment coefficients as a function of 𝐶𝐿 for the 12 airfoils Overall, moment coefficient should be considered as a factor when selecting an airfoil for pylon racers. It would be pointless to select a low drag airfoil that requires a larger tail, which can offset the drag benefit of the airfoil alone. 39 Moment Coefficient 0.020 0.60 4. Discussion and Conclusion 4.1 Summary of High Level Results My race simulation shows that Martin Hepperle’s MH-17 airfoil with 15% span 5 degree flaps has the lowest race time of 62.146 seconds, 3.511 seconds faster than the baseline NACA 66-012 airfoil. The NACA 66-012 airfoil performance can be improved by 1.261 seconds by the uses of 15% span 10 degree flaps during the turns. This airfoil can also be improved by blending it with another airfoil, such as the MH-18B to create a new airfoil, the MD-5. A wing comprised of this airfoil offers a 1.173 second benefit over the NACA 66-012. Also, the performance of this new airfoil can also be representative of a wing composed of the NACA 66-012, MH-18B, and the intermediate MD-5 airfoil. Blending a wing with the NACA 66-012 and a higher performance airfoil should improve the race time of the NACA 66-012. Consistency is stressed, down to the race course layout, drag calculations, and the engine performance to be able to offer relative comparisons between airfoils in the form of race times. In this project, I did not include the effect the pilot has on the pylon racers equipped with the different airfoils. An experienced pilot who can fly a tight and consistent race far outweighs the benefit one airfoil has over another. A pilot who flies the plane all over the race course will quickly erase a 2-3 second advantage of a plane equipped with a MH-17 airfoil. Even a top pilot racing a plane equipped with a Clark Y airfoil can handily beat a novice pilot flying a plane with an airfoil such as the MH-17 by minimizing the distance flown during a race. It all comes down to flying the race course in a smooth, consistent manner. 4.2 Recommendations for Further Research If anyone has the interest or desire to continue my research, he or she can start off by incorporating the effect of the airfoils’ moment coefficient by determining the tail size required, and applying the drag penalty or benefit to the overall plane drag. Even the increase of airfoil drag as a plane rolls into and out of turns can be included. Also, the race simulation could be further automated by only inputting both 𝐶𝐿 ′𝑠 and automatically calculating the overall race time. If such a person has sufficient time on his or her hands and wishes to be much more detailed, he/she could even link the XFOIL program with a race simulation to allow the calculation of more accurate 𝐶𝐿 ′𝑠 and 𝐶𝐷 ′𝑠 as velocity (and 40 Reynolds number) changes during a race. Still, I would expect the result to be very close to my race simulations using my assumptions. One also can perform a design of experiment (DOE) for determining the most effective airfoil cross section with the least drag coefficient for both flight regimes. Airfoil parameters, such as maximum thickness, camber, leading edge radii, curvature, location of maximum thickness, etc. can be set for a range of values. There could potentially be thousands of airfoil sections as determined by the number of airfoil parameters, and XFOIL is a great tool to assess each airfoil’s 𝐶𝑑 for both high speed and turning flight regimes. The optimal airfoil is that with the lowest 𝐶𝑑 for both modes of flight while meeting the thickness requirement of 11.875%. 41 5. References [1] 2011-2012 Academy of Model Aeronautics Competition Regulations, Rules Governing Model Aviation Competition in the United States. http://www.modelaircraft.org/files/2011-2012RCPylonRacing2JAEdit.pdf. [2] University of Illinois at Urbana-Champaign Department of Aerospace Engineering Airfoil Data Site, Maintained by Dr. Michael Selig. http://www.ae.illinois.edu/mselig/ads/coord_database.html [3] Hepperle, Martin. MH- Aero Tools Website. http://www.mh-aerotools.de/airfoils/ [4] Selig S-8064 Airfoil Coordinate File. University of Illinois at Urbana-Champaign Department of Aerospace Engineering Airfoil Data Site, Maintained by Dr. Michael Selig. http://www.ae.uiuc.edu/m-selig/ads/coord_updates/s8064.dat [5] Anderson, John D. Jr. 2000. An Introduction to Flight, Fourth Edition. Boston: McGraw-Hill. [6] Drela, Mark. XFOIL 6.9 User Primer, xfoil_doc.txt. Last updated 11/30/2001. http://web.mit.edu/drela/Public/web/xfoil/ [7] Raymer, Daniel P. 1989. Aircraft Design: A Conceptual Approach. Washington, DC: American Institute of Aeronautics and Astronautics, Inc. [8] Abbot, Ira H. and Von Doenhoff, Albert E. 1959. Theory of Wing Sections. New York: Dover Publishing, Inc. 42 6. Appendix 6.1 Email from Jett .40 Engine Manufacturer Concerning Actual Engine Power Output “There are much data that conflicts with what I say. The manufacturers over the years have exaggerated more and more, particularly since there is not industry standard to keep them in check. Nevertheless, I think you can safely use a number between 1.6 and 1.8 HP.” 6.2 Email from Dr. Martin Hepperle on Calculating Thrust on Engine/Propeller Combination “Michael, The actual thrust of a Propeller depends on engine characteristics and forward speed. Generally it has its maximum at static conditions or low speed and then drops towards zero when the propeller "overtakes" the engine and starts to act as a windmill. You could calculate it if you have the engines performance curve P=f(n) and the propeller performance curves CP=f(v/(n*D)) and CT=f(v/(n*D)) . I did this and for the simulation program I had approximated the resulting curves by the formula shown on the web page. In later simulations I reverted to the direct simulation of the engine /propeller match as computers are fast enough to do this during the simulation. Anyway, if you have the propeller and engine characteristics (e.g. calculated with JavaProp), you can follow these steps: 1) select one point on the given performance curve: rpm -> Power 2) calculate CP for this power and the propeller of interest: CP = P/(rho*n^3*D^5) 3) from the propellers CP=f(v/(n*D)) find the advance ratio v/(n*D) 4) find the matching flight speed from v/(n*D) (n and D are already known) 5) from CP=f(v/(n*D)) find CT and from this T = CT*rho*n^2*D^4. You now have one point where engine and propeller match. Repeat for other points on the engine performance curve. This yields curves of thrust, n, p versus flight speed which you can then approximate (for simplicity) or use by interpolation. Good luck, Martin” 43 6.3 XFOIL Input Parameters File name: xfoil.def 6.4 Output of JavaProp Program on Engine/Propeller Combination Velocity and Thrust outputs highlighted v/(nD) [-] 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.42 1.44 1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6 1.62 1.64 v/(?R) [-] 0 0.032 0.064 0.095 0.127 0.159 0.191 0.223 0.255 0.286 0.318 0.35 0.382 0.414 0.446 0.452 0.458 0.465 0.471 0.477 0.484 0.49 0.497 0.503 0.509 0.516 0.522 Ct [-] 0.086714 0.081407 0.084094 0.08456 0.085989 0.086405 0.084973 0.082217 0.078487 0.071823 0.062046 0.052101 0.041969 0.031689 0.021251 0.01914 0.017022 0.014898 0.012767 0.010616 0.008484 0.006354 0.004182 0.002024 -0.00016 -0.0024 -0.00462 Cp [-] 0.073635 0.07247 0.073814 0.075175 0.074455 0.074884 0.076969 0.078576 0.079756 0.078374 0.072929 0.065874 0.057105 0.046601 0.034287 0.031595 0.028828 0.025984 0.023064 0.020045 0.016987 0.013865 0.010612 0.007308 0.003894 0.000319 -0.00328 Cs [-] 0.000053 0.169032 0.336823 0.503392 0.672482 0.839637 1.002046 1.164235 1.32659 1.497642 1.688185 1.895177 2.127387 2.400288 2.748536 2.833775 2.926848 3.029794 3.145403 3.278619 3.43416 3.623546 3.872291 4.225666 4.853323 8.107395 5.147183 Tc [-] 9.999999 9.999999 5.353579 2.392553 1.368562 0.88011 0.601064 0.427276 0.312291 0.225797 0.158 0.109648 0.074217 0.047749 0.02761 0.024171 0.020904 0.017798 0.014843 0.012015 0.00935 0.006822 0.004376 0.002064 -0.00016 -0.00233 -0.00437 Pc [-] 9.999999 9.999999 9.999999 7.090067 2.962487 1.525533 0.90741 0.583356 0.396676 0.273769 0.185712 0.126031 0.084153 0.054014 0.031819 0.028099 0.024585 0.021261 0.018117 0.015124 0.012318 0.009667 0.007118 0.004718 0.002421 0.000191 -0.0019 ? [%] 0 11.23 22.79 33.75 46.2 57.69 66.24 73.24 78.73 82.48 85.08 87 88.19 88.4 86.77 86.02 85.03 83.71 81.93 79.44 75.91 70.57 61.48 43.75 0 0 0.19 ?* [%] 0.01 34.95 56.19 69.61 77.9 83.41 87.32 90.16 92.27 94.04 95.56 96.74 97.68 98.43 99.05 99.16 99.26 99.37 99.47 99.56 99.66 99.75 99.84 99.92 99.99 99.99 49.59 stalled [%] 20.00 ! 99.00 ! 76.00 ! 30 15 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 v [m/s] 0 6.71 13.41 20.12 26.82 33.53 40.23 46.94 53.64 60.35 67.06 73.76 80.47 87.17 93.88 95.22 96.56 97.9 99.24 100.58 101.93 103.27 104.61 105.95 107.29 108.63 109.97 rpm [1/min] 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 18000 Power [kW] 1.354 1.333 1.358 1.383 1.369 1.377 1.416 1.445 1.467 1.442 1.341 1.212 1.05 0.857 0.631 0.581 0.53 0.478 0.424 0.369 0.312 0.255 0.195 0.134 0.072 0.006 -0.06 Thrust [N] 23.8 22.3 23.1 23.2 23.6 23.7 23.3 22.6 21.5 19.7 17 14.3 11.5 8.7 5.8 5.2 4.7 4.1 3.5 2.9 2.3 1.7 1.1 0.6 0 -0.7 -1.3 Torque [Nm] 0.7 0.7 0.7 0.7 0.7 0.7 0.8 0.8 0.8 0.8 0.7 0.6 0.6 0.5 0.3 0.3 0.3 0.3 0.2 0.2 0.2 0.1 0.1 0.1 0 0 0 6.5 Screenshots of Maple Calculation of Maximum Possible Velocity and Maximum Speed Loss in Turns for NACA 66-012 Airfoil 44 45 46 6.6 Maple Screenshots of Maple Calculation of Time and Velocity for Start Line to Take Off and Around First Turn for NACA 66-012 Airfoil 47 48 49 6.7 XFOIL Polar Accumulation Results (PACC command) for NACA 66-012 Airfoil for α from -1 to 5 Degrees 50 alpha ------1.0 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3.0 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 4.0 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 5.0 CL --------0.1151 -0.1037 -0.0922 -0.0807 -0.0692 -0.0577 -0.0462 -0.0346 -0.0231 -0.0116 0.0000 0.0115 0.0230 0.0345 0.0460 0.0576 0.0691 0.0806 0.0921 0.1150 0.1264 0.1378 0.1492 0.1605 0.1719 0.1832 0.1945 0.2058 0.2169 0.2280 0.2392 0.2503 0.2614 0.2725 0.2833 0.2931 0.2988 0.3057 0.3126 0.3194 0.3269 0.3345 0.3419 0.3501 0.3592 0.3691 0.3795 0.3900 0.4004 0.4106 0.4212 0.4316 0.4415 0.4520 0.4625 0.4728 0.4832 0.4930 0.5026 0.5129 CD --------0.00523 0.00525 0.00525 0.00526 0.00526 0.00526 0.00527 0.00528 0.00529 0.00529 0.00529 0.00529 0.00529 0.00528 0.00527 0.00526 0.00526 0.00526 0.00525 0.00523 0.00523 0.00521 0.00519 0.00518 0.00517 0.00517 0.00515 0.00514 0.00514 0.00514 0.00515 0.00515 0.00516 0.00518 0.00522 0.00533 0.00581 0.00624 0.00668 0.00713 0.00750 0.00786 0.00824 0.00855 0.00877 0.00892 0.00902 0.00912 0.00922 0.00933 0.00940 0.00949 0.00963 0.00971 0.00979 0.00988 0.00998 0.01012 0.01028 0.01036 51 CDp --------0.00136 0.00137 0.00138 0.00139 0.00139 0.00140 0.00141 0.00142 0.00142 0.00142 0.00142 0.00142 0.00142 0.00142 0.00141 0.00140 0.00139 0.00139 0.00138 0.00136 0.00136 0.00135 0.00134 0.00133 0.00132 0.00132 0.00130 0.00129 0.00128 0.00126 0.00125 0.00125 0.00126 0.00127 0.00128 0.00128 0.00140 0.00155 0.00170 0.00185 0.00199 0.00213 0.00227 0.00241 0.00252 0.00261 0.00270 0.00279 0.00287 0.00298 0.00306 0.00315 0.00329 0.00338 0.00347 0.00356 0.00366 0.00380 0.00398 0.00408 CM -------0.0012 0.0011 0.0010 0.0009 0.0008 0.0007 0.0005 0.0004 0.0003 0.0001 0.0000 -0.0001 -0.0002 -0.0004 -0.0005 -0.0006 -0.0007 -0.0009 -0.0010 -0.0012 -0.0013 -0.0014 -0.0015 -0.0015 -0.0016 -0.0017 -0.0017 -0.0018 -0.0018 -0.0018 -0.0019 -0.0019 -0.0019 -0.0020 -0.0019 -0.0017 -0.0009 -0.0003 0.0002 0.0007 0.0011 0.0016 0.0020 0.0024 0.0026 0.0027 0.0028 0.0028 0.0029 0.0030 0.0030 0.0031 0.0032 0.0032 0.0033 0.0033 0.0034 0.0035 0.0037 0.0038 Top_Xtr -------0.7741 0.7736 0.7728 0.7720 0.7713 0.7705 0.7698 0.7691 0.7684 0.7676 0.7667 0.7657 0.7644 0.7627 0.7610 0.7594 0.7579 0.7563 0.7543 0.7500 0.7479 0.7443 0.7412 0.7376 0.7343 0.7308 0.7256 0.7195 0.7122 0.7027 0.6945 0.6863 0.6780 0.6683 0.6525 0.6161 0.5244 0.4519 0.3773 0.3023 0.2398 0.1795 0.1201 0.0750 0.0489 0.0381 0.0339 0.0309 0.0286 0.0267 0.0256 0.0243 0.0229 0.0222 0.0216 0.0209 0.0203 0.0195 0.0190 0.0187 Bot_Xtr -------0.7500 0.7521 0.7542 0.7563 0.7579 0.7594 0.7610 0.7627 0.7644 0.7657 0.7667 0.7676 0.7684 0.7691 0.7698 0.7705 0.7712 0.7720 0.7728 0.7741 0.7747 0.7754 0.7760 0.7767 0.7774 0.7782 0.7789 0.7797 0.7805 0.7814 0.7821 0.7828 0.7835 0.7842 0.7850 0.7859 0.7869 0.7879 0.7889 0.7900 0.7909 0.7917 0.7925 0.7935 0.7944 0.7954 0.7965 0.7975 0.7986 0.7995 0.8003 0.8013 0.8023 0.8033 0.8044 0.8055 0.8067 0.8077 0.8086 0.8096
 0
0

No more boring flashcards learning!
Learn languages, math, history, economics, chemistry and more with free StudyLib Extension!
- Distribute all flashcards reviewing into small sessions
- Get inspired with a daily photo
- Import sets from Anki, Quizlet, etc
- Add Active Recall to your learning and get higher grades!

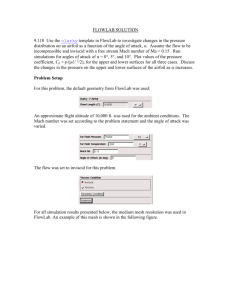
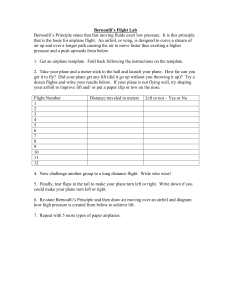
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users