d- and q-Axis Equivalent Circuits
advertisement

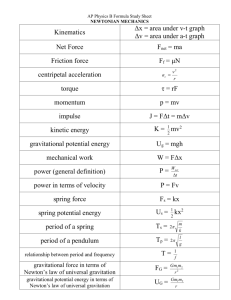
Advanced Power Systems Dr. Kar U of Windsor Dr. Kar 271 Essex Hall Email: nkar@uwindsor.ca Office Hour: Thursday, 12:00-2:00 pm http://www.uwindsor.ca/users/n/nkar/88-514.nsf GA: TBA B20 Essex Hall Email: TBA & TBA Office Hour: ----- Course Text Book: Electric Machinery Fundamentals by Stephen J. Chapman, 4th Edition, McGraw-Hill, 2005 Electric Motor Drives – Modeling, Analysis and Control by R. Krishnan Pren. Hall Inc., NJ, 2001 Power Electronics – Converters, Applications and Design by N. Mohan, J. Wiley & Son Inc., NJ, 2003 Power System Stability and Control by P. Kundur, McGraw Hill Inc., 1993 Research papers Grading Policy: Attendance Project Midterm Exam Final Exam (5%) (20%) (30%) (45%) Course Content Working principles, construction, mathematical modeling, operating characteristics and control techniques for synchronous machines Working principles, construction, mathematical modeling, operating characteristics and control techniques for induction motors Introduction to power switching devices Rectifiers and inverters Variable frequency PWM-VSI drives for induction motors Control of High Voltage Direct Current (HVDC) systems Exam Dates Midterm Exam: Final Exam: Term Projects Group 1: Student 1 (---@uwindsor.ca) Student 2 (---@uwindsor.ca) Student 3 (---@uwindsor.ca) Project Title: Group 2: Student 1 (---@uwindsor.ca) Student 2 (---@uwindsor.ca) Student 3 (---@uwindsor.ca) Project Title: Group 3: Student 1 (---@uwindsor.ca) Student 2 (---@uwindsor.ca) Student 3 (---@uwindsor.ca) Synchronous Machines Construction Working principles Mathematical modeling Operating characteristics CONSTRUCTION Salient-Pole Synchronous Generator 1. Most hydraulic turbines have to turn at low speeds (between 50 and 300 r/min) 2. A large number of poles are required on the rotor d-axis Nonuniform airgap N D 10 m q-axis Turbin e Hydro (water) Hydrogenerator S S N Salient-Pole Synchronous Generator Stator Cylindrical-Rotor Synchronous Generator Stator Cylindrical rotor Damper Windings Operation Principle The rotor of the generator is driven by a prime-mover A dc current is flowing in the rotor winding which produces a rotating magnetic field within the machine The rotating magnetic field induces a three-phase voltage in the stator winding of the generator Electrical Frequency Electrical frequency produced is locked or synchronized to the mechanical speed of rotation of a synchronous generator: fe nm P 120 where fe = electrical frequency in Hz P = number of poles nm= mechanical speed of the rotor, in r/min Direct & Quadrature Axes d-axis Stator winding N Uniform air-gap Stator q-axis Rotor winding Rotor S Turbogenerator PU System Per unit system, a system of dimensionless parameters, is used for computational convenience and for readily comparing the performance of a set of transformers or a set of electrical machines. PU Value Actual Quantity Base Quantity Where ‘actual quantity’ is a value in volts, amperes, ohms, etc. [VA]base and [V]base are chosen first. I base VAbase V base Pbase Qbase S base VAbase V base I base Rbase X base Z base Ybase Z PU I base V base Z ohm Z base 2 2 V base V base V base I base S base VAbase Classical Model of Synchronous Generator The leakage reactance of the armature coils, Xl Armature reaction or synchronous reactance, Xs The resistance of the armature coils, Ra If saliency is neglected, Xd = Xq = Xs jXs jXl Ra + + E d Ia Vt 0o Equivalent circuit of a cylindrical-rotor synchronous machine Phasor Diagram q-axis E IaXs d f IaRa Ia d-axis Vt IaXl The following are the parameters in per unit on machine rating of a 555 MVA, 24 kV, 0.9 p.f., 60 Hz, 3600 RPM generator Lad=1.66 Laq=1.61 Ll=0.15 Ra=0.003 (a) When the generator is delivering rated MVA at 0.9 p. f. (lag) and rated terminal voltage, compute the following: (i) Internal angle δi in electrical degrees (ii) Per unit values of ed, eq, id, iq, ifd (iii) Air-gap torque Te in per unit and in Newton-meters (b) Compute the internal angle δi and field current ifd using the following equivalent circuit Direct and Quadrature Axes The direct (d) axis is centered magnetically in the center of the north pole The quadrature axis (q) axis is 90o ahead of the d-axis q: angle between the d-axis and the axis of phase a Machine parameters in abc can then be converted into d/q frame using q Mathematical equations for synchronous machines can be obtained from the d- and q-axis equivalent circuits Advantage: machine parameters vary with rotor position w.r.t. stator, q, thus making analysis harder in the abc axis frame. Whereas, in the d/q reference frame, parameters are constant with time or q. Disadvantage: only balanced systems can be analyzed using d/q-axis system d- and q-Axis Equivalent Circuits + + Rfd pykd1 - pyfd + vfd yq Xl Xfd Ifd Ikd1 Ra Id Imd Rkd1 Xmd Vtd pyd Xkd1 - - d-axis Imd=-Id+Ifd+Ikd1 - yd Xl + pykq1 - Ikq1 Rkq1 Ra Imq=-Iq+Ikq1 Iq Imq Xmq pyq Xkq1 q-axis Vtq Small disturbances in a power system o o o Gradual changes in loads Manual or automatic changes of excitation Irregularities in prime-mover input, etc. Importance of steady-state stability o Knowledge of steady-state stability provides valuable information about the dynamic characteristics of different power system components and assists in their design - Power system planning - Power system operation - Post-disturbance analysis Related Terms o Generator Modeling using the d- and q-axis equivalent circuits o Transmission System Modeling with a RL circuit o A Small Disturbance is a disturbance for which the set of equations describing the power system may be linearized for the purpose of analysis o Steady-State Stability is the ability to maintain synchronism when the system is subjected to small disturbances o Loss of synchronism is the usual symptom of loss of stability o Infinite Bus is a system with constant voltage and constant frequency, which is the rest of the power system o Eigen values and eigen vectors are used to identify system steady-state stability condition The Flux Equations y d - X md X l id X md ikd 1 X md i fd y kd 1 - X md id X md X kd 1 ikd 1 X md i fd y fd - X md id X md ikd 1 X md X fd i fd y q - X mq X l iq X mq ikq1 y kq1 - X mq iq X mq X kq1 ikq1 Rearranged Flux Linkage equations y d - X md X l y - X md kd1 y fd - X md y q y kq1 X md X md X kd1 X md X md X md X md X fd - X mq X l - X mq X mq - X mq X kq1 id i kd1 i fd i q ikq1 The Voltage Equations 1 0 1 0 1 0 1 0 1 0 py d vtd Ra id y q py kd1 - Rkd1 ikd1 p y fd v fd - R fd i fd p y q vtq Ra iq - y d p y kq1 - Rkq1 ikq1 ……………..(1) The Mechanical Equations dd - 0 dt d 0 Tm - Te dt 2 H where Te y d I q -y q I d ……………..(2) Linearized Form of the Machine Model y q0 y d vtd Ra id y q 0 0 1 1 0 y kd1 - Rkd1 ikd1 1 0 y fd v fd - R fd i fd 1 0 y q vtq Ra iq - y d - y d0 0 1 0 y kq1 - Rkq1 ikq1 d 0 2H Tm - Te Te y d 0 I q I q 0 y d -y q 0 I d - I d 0 y q ……………..(3) Terminal Voltage The d- and q-axis components of the machine terminal voltage can be described by the following equations: vtd Vt sin d vtq Vt cos d ………………………….(4) where, Vt is the machine terminal voltage in per unit. The linearized form of Vtd and Vtq are: vtd Vt cosd 0 d vtq -Vt sin d 0 d ……………………….…(5) Substituting ∆Vtd and ∆Vtq in the flux equations: 1 0 y d Vt cos d 0 d Ra id y q y q0 0 1 0 y kd1 - Rkd1 ikd1 1 0 y fd v fd - R fd i fd 1 0 y q -Vt sin d 0 d Ra iq - y d - y d0 0 1 0 y kq1 - Rkq1 ikq1 d 0 2H Tm - Te Te y d 0 I q I q 0 y d -y q 0 I d - I d 0 y q ……..(6) Rearranging the flux equations in a matrix form: ………………...…..(7) X S X R I B U where, y d kd1 y y fd X y q y kq1 d y d y kd1 y fd X y q y kq1 d Id I kd1 I I fd I q I kq1 v fd U Tm and… 0 0 0 0 0 0 S 0 - 0 0 0 0 0 0 - 0 I q 0 2H 0 0 0 0 0 0 0 0Vt cos d 0 0 0 0 0 0 0 0 - 0Vt sin d 0 0 0 0 0 0 0 0 0 - 0 R fd 0 0 R 0 0 0 0 0 0 0 0 Ra 0 0 0 0 - 0 Rkd1 0 0 0 Ra 0 0 0 0 0 0 0 0 0 I d 0 0 2H 0y q 0 2H 0 - 0y d 0 2H 0 y q0 0 -y d 0 0 1 0 0 0 0 - 0 Rkq1 0 0 0 0 0 B 0 0 0 0 0 2H 0 0 0 Flux Linkage Equations (from the d- and q-axis equivalent circuits) y d - X md X l y - X md kd1 y fd - X md y 0 q y kq1 0 X md X md X kd1 X md 0 0 X md 0 0 id i X md 0 0 kd1 X md X fd 0 0 i fd 0 - X mq X l X mq iq 0 - X mq - X mq X kq1 ikq1 Linearized flux linkage equations: y d - X md X l y - X md kd1 y fd - X md y 0 q y kq1 0 X md X md X kd1 X md 0 0 X md 0 0 id i X md 0 0 kd1 X md X fd 0 0 i fd 0 - X mq X l X mq i q 0 - X mq - X mq X kq1 ikq1 and thus, id - X md X l i - X md kd1 i fd - X md 0 iq ikq1 0 - X md X l -X md - X md 0 0 X md X md X kd1 X md 0 0 X md X md X kd1 X md 0 0 y d y kd1 y fd -1 X reac y q y kq1 d X md 0 0 X md 0 0 X md X fd 0 0 0 - X mq X l X mq 0 - X mq - X mq X kq1 X md 0 0 X md 0 0 X md X fd 0 0 0 - X mq X l X mq 0 - X mq - X mq X kq1 -1 y d y kd1 y fd y q y kq1 0 0 0 0 0 ………………………………………...(8) y d 0 y kd1 0 y fd 0 y q 0 y kq1 0 d y d y id kd1 i y fd kd1 I i fd X reac -1 y q X reac -1X i y kq1 q ikq1 d : from (8) X S X R I B U S X R X reac -1X B U S R X reac -1 X B U : inserting (8) into (7) AX B U where, A S RX reac -1 ………..(9) : system state matrix System to be Studied Vt It Generator Infinite Bus System State Matrix and Eigen Values System State Matrix: A S R X reac -1 Eigen Values: 1, 2 - j j 1 q 2 Eigen Values o Eigen values are the roots of the characteristic equation X AX B U o o Number of eigen values is equal to the order of the characteristic equation or number of state variables t Eigen values describe the system response (e 1 ) to any disturbance Analyzing the Eigen Values of the System State Matrix o o o Compute the eigen values of the system state matrix, A The eigen values will give necessary information about the steady-state stability of the system Stable System: If the real parts of ALL the eigen values are negative Example: o 1 , 2 -0.15 j 2.0 3 -0.0005 A system with the above eigen values is on the verge of instability Machine Parameters Salient-pole synchronous generator 3kVA, 220V, 4-pole, 60 Hz and 1800 r/min Machine parameters Per unit values d-axis magnetizing reactance, Xmd 1.189 q-axis magnetizing reactance, Xmq 0.7164 Armature leakage reactance, Xl 0.100 Field circuit leakage reactance, Xfd 0.276 First d-axis damper circuit leakage reactance, Xkd1 0.181 First q-axis damper circuit leakage reactance, Xkq1 0.193 Armature winding resistance, Ra 0.0186 Field winding resistance, Rfd 0.0058 First d-axis damper winding resistance, Rkd1 0.062 First q-axis damper winding resistance, Rkq1 0.052