Final Control
advertisement

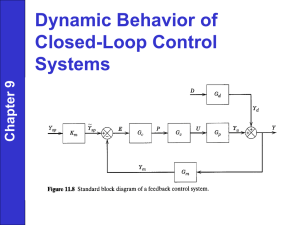
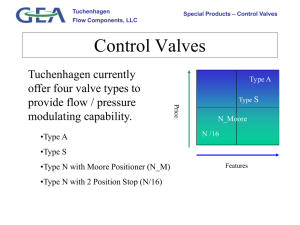
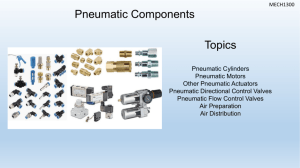
Final Control Chapter 7 OBJECTIVES • Define the three parts of final control element operation. • Explain the basic principles of the pneumatic nozzle/flapper system. • Explain the operation of a pneumatic valve stem positioning actuator. • Describe the difference between three control valve types • Explain the process of control valve size determination. the measurement and evaluation of some process variable is carried out using a low-energy analog or digital signal to represent the variable Low power electronics Low power pneumatic or hydraulic the controlled process itself may involve a high-energy condition DC or AC motors High pressure/flow Final control operation Final control element operations involve the steps necessary to convert the control signal into proportional action on the process itself. For a typical process-control application, the conversion of a process-controller signal to a control function can be represented by the steps shown in Figure Control Signal Signal conversion Actuator Final control Element Process Example: typical 4- to 20-mA control signal to vary a large flow rate from, say, 10.0 m3/min to 50.0 m3/min certainly requires some intermediate operations. Signal Conversions It refers to the modifications that must be made to the control signal to properly interface with the next stage of control—that is, the actuator industrial electronics The devices that perform such signal conversions are often called transducers Actuators The results of signal conversions provide an amplified and/or converted signal designed to operate (actuate) a mechanism that changes a controlling variable in the process. The actuator is a translation of the (converted) control signal into action on the control element. Example if a valve is to be operated, then the actuator is a device that converts the control signal into the physical action of opening or closing the valve Control Element it is a device that has direct influence on the process dynamic variable and is designed as an integral part of the process. Examples if flow is to be controlled, then the control element, a valve, must be built directly into the flow system. if temperature is to be controlled, then some mechanism or control element that has a direct influence on temperature must be involved in the process. This could be a heater/cooler combination that is electrically actuated by relays or a pneumatic valve to control influx of reactants. SIGNAL CONVERSIONS The principal objective of signal conversion is to convert the low-energy control signal to a high-energy signal to drive the actuator. Controller output signals are typically in one of three forms: (1) electrical current, usually 4- to 20-mA; (2) pneumatic pressure, usually 3 to 15 psi or 20 to 100 kPa; (3) digital signals, usually TTL-level voltages in serial or parallel format. Analog Electrical Signals Relays Electro mechanical Solid-state relays Amplifiers High-power ac or dc amplifiers The amplifier system must provide an output given by the 4 to 20 mA becomes 0.4 to 2.0 V. We know that 0.4-V input must provide 5-V output, and 2-V input must provide 10-V output. find K and VB we get the result is Motor Control Many motor control circuits are designed as packaged units that accept a lowlevel dc signal directly to control motor speed. it is possible to build circuits using amplifiers along with SCRs or TRIACs to perform this control.. Digital Electrical Signals ON/OFF Control 0 or 1 True or false DAC a DAC that then determines an appropriate analog output The first bit change produces a power change of 1.28 W, and the last bit, a power change of 37.12W. Pneumatic Signals In a pneumatic system, information is carried by the pressure of gas in a pipe The pressure signal travels down the pipe at a speed in the range of the speed of sound in the gas (say, air), which is about 330 m/s. Pneumatics is still employed in many installations either because of danger from electrical equipment or as a carryover from previous years, where conversion to electrical methods would not be cost effective. pneumatic signals are carried with dry air as the gas and signal information are adjusted to lie within the range of 3 to 15 psi. In SI unit systems, the range of 20 to 100 kPa is used There are three types of signal conversion of primary interest. Amplification Nozzle/Flapper System Current-to-Pressure Converters Amplification A pneumatic amplifier, also called a booster or relay, raises the pressure and/or air flow volume by some linearly proportional amount from the input signal. A pneumatic amplifier or booster converts the signal pressure to a higher pressure or the same pressure but with greater gas volume. if the booster has a pressure gain of 10, the output would be 30 to 150 psi for an input of 3 to 15 psi. Nozzle/Flapper System (nozzle/baffle) It converts pressure to mechanical motion and vice versa. usually over 20 psig, provides a source of air through the restriction. The nozzle is open at the end where the gap exists between the nozzle and flapper, Current-to-Pressure Converters It is known as I/P converter is an important element in process control. It uses the low-level electric current signal to do work the 4- to 20-mA current into a 3- to I 5-psig signal. Operation principle the current through a coil produces a force that will tend to pull the flapper down and close off the gap. A high current produces a high pressure so that the device is direct acting. Adjustment of the springs and perhaps the position relative to the pivot to which they are attached allows the unit to be calibrated so that 4 mA corresponds to 3 psig and 20 mA corresponds to 15 psig. Application : current-to-pressure converter Switching Devices Self –review • Industrial electronics • Power electronics Pneumatic Actuators The principle is based on the concept of pressure as force per unit area The net pressure difference is applied across a diaphragm of surface area A is given by where P1 — P2 = pressure difference (Pa) A = diaphragm area (m2) F = force (N) Very large forces can be developed by standard signal-pressure ranges of 3 to 15 psi (20 to 100 kPa) Many types of pneumatic actuators are available, but perhaps the most common are those associated with control valves A direct pneumatic actuator for converting pressure signals into mechanical shaft motion A reverse actuator the shaft position is linearly related to the applied control pressure 𝑥 − shaft travel (m) p- applied gauge pressure (Pa) A - diaphragm area (m2) k = spring constant (N/m) Hydraulic Actuators The hydraulic pressure is given by p- applied gauge pressure (Pa) A1 - forcing piston area (m2) F1 = applied piston force (N/m) The pressure is transferred equally throughout the liquid, so the resulting force on the working piston is Where e F = force of working piston (N) A2 = working piston area (m2) the working force is given in terms of the applied force by Hydraulic Servos It is used when it is desired to control the position of large loads as part of the control system. This often can be done by using the low-energy controller output as the setpoint input to a hydraulic control system In this system, high-pressure hydraulic fluid can be directed to either side of a force piston, which causes motion in either direction. CONTROL ELEMENTS Mechanical Control elements that perform some mechanical operation in a process (by virtue of operations) are called mechanical control elements Solid-Material Hopper Valves Paper Thickness Solid-Material Hopper Valves mechanical control element in the form of a hopper valve and conveyor Paper Thickness Electrical There are numerous cases where a direct electrical effect is impressed in some process- control situation Motor-Speed Control Temperature Control Basic control system for motor speed using a tachometer to sense the motor speed. A control system varies the rotation rate of a reaction kiln based upon temperature. Temperature Control Temperature often is controlled by using electrical heaters in some application of industrial control. ON/OFF cycle a heater set the heater within a continuous span of operating voltage Control of heat into a reaction vessel through an electrical power amplifier. Fluid Valves Pressure control Fluid Valves flow control Fluid Valves Directional control Fluid Valves Control-Valve Principles Flow rate in process control Flow velocity Flow rate Mass Flow rate Volumetric Flow rate volume flow rate is expressed as Case study: Flow control valve Control-Valve Types I. Quick Opening 2. Linear 3. Equal Percentage A Typical Control Valve Using A Pneumatic Actuator I. Quick Opening This type of valve is used predominantly for full ON/full OFF control applications.. for example, it may allow 90% of maximum flow rate with only a 30% travel of the stem. 2. Linear This type of valve has a flow rate that varies linearly with the stem position The relationship is expressed as 3. Equal Percentage A very important type of valve employed in flow control has a characteristic such that a given percentage change in stem position produces an equivalent change in flow—that is, an equal percentage this type of valve does not shut off the flow completely in its limit of stem travel rangeability, R The curve in Figure above shows a typical equal percentage curve that depends on the rangeability for its exact form Control-Valve Sizing Fluid-Control Example The end of chapter 7