hw4a_KAAP427
advertisement

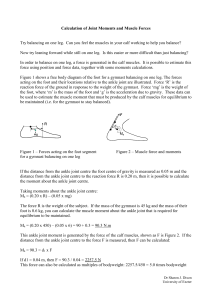
Homework 4 KAAP427/627 Compute forces and moments in two dimensions at the ankle joint, using inverse mechanics, and data is from Appendix A, Winter 4th ed. This data is available at Wiley web site for resources for Winter 4th ed. : http://bcs.wiley.com/hebcs/Books?action=resource&bcsId=5453&itemId=0470398183&resourceId=19492 Use the kinematic and ground reaction force data in Tables A.2, A.3, and A.5. Right foot: Xprox,Zprox=right ankle. Distal forces are applied to foot segment at Xdist=Xcop; Zdist=Zcop. Angular acceleration (ALPHAfoot) is negative of the value in Winter’s Table, because our +Y axis points opposite way. Ground reaction forces, right foot: Fgx,Fgz. Segment length: Lfoot=0.122 m (needed for moment of inertia; from Fig. A.1) Body mass = 56.7 kg (needed for segment mass; from Fig. A.1) g = -9.8 m/s2 1. Compute and plot foot proximal force FPX(t), FPZ(t), in N (i.e. force at ankle). 2. Compute and plot foot proximal moment MpY(t), in N-m (i.e. ankle moment). Note that you do not need to calculate b=distance ratio as listed in file “inverse_mechanics_2.docx” . You also do not need to calculate the center of mass coordinates or the segment angles or the segment accelerations, because those quantities are already calculated, and are provided in the Appendix data. You do need to calculate the foot segment mass and moment of inertia. Use the body mass and segment length provided at the start of this problem, and use coefficient from Table 4.1, to estimate segment mass and moment of inertia. Data you need is in file hw4data.txt. Import into Excel or Labview or Matlab. It has 2 header rows. [Hip and thigh data for use in a future or additional homework problem: Lthigh=0.314 m. Right thigh: Xprox,Zprox=right hip, A.2(a). Xdist,Zdist = right knee X,Y, A.2(b). Xcg,Zcg=COM-X,COM-Y, A.3(c). aX,aZ=ACC-X,ACC-Y, A.3(c). αy(t)= -ALPHA, A.3(c) ] HW 4a, Q1: Ankle Force 200 100 0 Force (N) -100 0.0 0.4 0.8 1.2 1.6 -200 -300 -400 Fx_ankle -500 Fz_ankle -600 -700 Time (s) HW 4a, Q2: Ankle Moment 100 Torque (N-m) 80 60 40 20 0 0.0 -20 0.4 0.8 Time (s) 1.2 1.6