Chapter 4: Equilibrium
advertisement

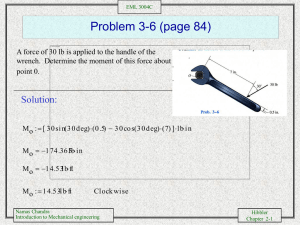
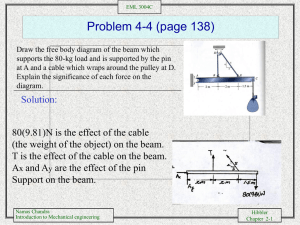
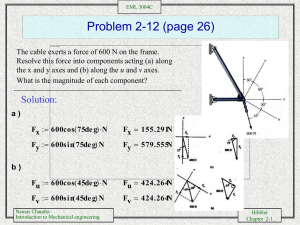
EML 3004C Chapter 4: Equilibrium Equilibrium means balance of forces to prevent body from translating, and balance of moments to prevent body from rotating. Vector analysis in 3-D is the preferred method of solution. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-1 EML 3004C 4.1 Conditions for Equilibrium Equilibrium means that the object is at rest (if originally at rest), or in constant velocity (if originally moving). F 0 F ma (Static) (dynamic) but a 0 for static Let Fi be the external force and f i be the F + f = 0. Since for equilibrium f = 0, we have F 0 internal force. Then i i i Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-2 EML 3004C 4.1 Conditions of Equilibrium Con’t Moment about any point O, M = 0 Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-3 EML 3004C 4.2 Free Body Diagrams Need to know how to represent support and contact conditions. If a support prevents translation in any direction, we have a reaction force in that direction. If a support prevents rotation in any orientation, then we have a couple moment exerted. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-4 EML 3004C 4.2 Free Body Diagrams Con’t Weight always acts at the center of gravity. W=mg Consider the case of springs. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-5 EML 3004C 4.2 Free Body Diagrams Con’t Consider the cantilever beam supported by a fixed support at A. Free body diagram Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-6 EML 3004C Free Body Diagrams of a Platform Consider the platform Exclude all other effects except the platform now! Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-7 EML 3004C 4.3 Equations of Equilibrium In two dimensions (x-y plane) F F F x y z 0 Rarely though F M M 0 M M M 0 a A A Namas Chandra Introduction to Mechanical engineering B B C Hibbeler Chapter 4-8 EML 3004C 4.3 Supports and Reactions Supports are idealized first. Reaction forces (magnitude and direction) and moments then depends on the type of support. Roller allows motion along the plane. Reaction force is perpendicular to the surface. Rocker allows rotation at that point. Reaction force is perpendicular to the surface. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-9 EML 3004C 4.3 Supports and Reactions-2 Pin connected to a collar. Reaction force is perpendicular to the rod. Hinge allows motion both in x and y direction but no rotation. Reaction force in x and y only. F not along member Fixed allows no rotation and no translation. Reaction force vector and moment will result. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-10 EML 3004C 4.3 Analysis Precedure First draw the free body diagram for the loading shown to the right. Apply equations of equilibrium through force and moment balance. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-11 EML 3004C Problem 4-3 (page 138, Section 4.1-4.3) 4.3 Draw the free-body diagram of the automobile, which has a mass of 5 Mg and center of mass at G. The tires are free to roll, so rolling resistance can be neglected. Explain the significance of each force on the diagram. Solution: W effect of gravity (weight) on the car. T = effect of the cable on the car. N A and N B = effect of the road surface on the car. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-12 EML 3004C Problem 4-7 (page 139, Section 4.1-4.3) 4.7 Draw the free body diagram of the beam. The incline at B is smooth. Solution: Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-13 EML 3004C Problem 4-17 (page 154, Section 4.4-4.5) 4.17 Determine the stretch of each spring for equilibrium of 20-Kg block. The springs are shown in their equilibrium position. Solution: Equilibrium: Spring AD + F y = 0; FAD 20(9.81) 0 Spring AB and AC 4 + Fy = 0; FAB FAC sin 45=0 5 3 + Fx = 0; FAB FAC cos 45 196.2=0 4 Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-14 EML 3004C 4.17 Determine the stretch of each spring for equilibrium of 20-Kg block. The springs are shown in their equilibrium position. Solution-Con’t (slide 2) Solving Eq. 1 and 2 yields: FAC 158.55 N FAB 140.14N Spring elongation: 140.14 x AB 0.467m 300 158.55 x AC 0.793m 200 196.2 x AD 0.490m 400 Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-15 EML 3004C 4.4 Two-Force Members Two force members are trusses that have forces (tension or compression) but not couple moments. Resolve all the forces at A and B so that FA F1 F2 F3 and FB F4 F5 F6 If FA and FB are collinear then FA FB and M 0. Then the body is a two-force member. It can be either in compression FA < 0 or tension FA > 0 Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-16 EML 3004C 4.4 Two and Three-Force Members If a member is subjected to three coplanar forces, then the forces should either be concurrent or coplanar for equilibrium. Hydraulic cylinder is a two-force member Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-17 EML 3004C Problem 4-26 (page 155, Section 4.4-4.5) 4.26 Determine the horizontal and vertical components of reaction at the pin A and the force in the short link BD. Solution: CCW + M A 0; 8 (1.5 cos 30) - FBD (0.5 sin 30) = 0 FBD 41.57 kN = 41.6 kN + Fx 0; 41.57 - Ax 0 Ax 41.6 kN Fy 0; Ay 8 0 A y 8 kN Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-18 EML 3004C 4.5 Equilibrium in 3-D The concept of equilibrium in 3-D is similar. Here we need to solve all the known and unknown in 3-D. Once again we need to know the reaction forces and moments for each type of support, see Table 4-2 Ball- Only 3 forces Bearing- 2 forces+2 moments Namas Chandra Introduction to Mechanical engineering Pin- All except 1 moment Fixed- All 6 forces & moments Hibbeler Chapter 4-19 EML 3004C 4.6 Equations of Equilibrium In 3-D we apply all the equations of motion F 0 M 0 The same equations can be written as a set of six scalar equations. F F F 0 M M M 0 x y x z y z Procedure for Analysis: 1. Draw Free body diagram for the body under analysis 2. Mark all the reaction and external forces/moments. 3. Use the above equations to solve. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-20 EML 3004C Problem 4-68 (page 174, Section 4.6-4.7) 4.68 Member AB is supported by a cable BC and at A by a smooth fixed square rod which fits loosely through the square hole of the collar. If the force F = - 45k lb, determine the tension in cable BC and the x, y, z components of reaction at A. Solution: Force Vector: 12i + 4j + 6k FBC FBC (12) 2 42 62 6 2 3 = - FBC i + FBC j + FBC k 7 7 7 Equilibrium: Fz 0; Namas Chandra Introduction to Mechanical engineering 3 FBC - 45 = 0 7 FBC 105 lb Hibbeler Chapter 4-21 EML 3004C 4.68 Member AB is supported by a cable BC and at A by a smooth fixed square rod which fits loosely through the square hole of the collar. If the force F = - 45k lb, determine the tension in cable BC and the x, y, z components of reaction at A. Solution-Con’t (slide 2) F x 0; 6 Ax (105) 0 7 Fy 0; Ax 90 lb 2 Ay (105) 0 7 M x 0; Ay 30 lb 3 M Ax (105)(4) 0 7 Namas Chandra Introduction to Mechanical engineering M Ax 180 lb ft Hibbeler Chapter 4-22 EML 3004C 4.68 Member AB is supported by a cable BC and at A by a smooth fixed square rod which fits loosely through the square hole of the collar. If the force F = - 45k lb, determine the tension in cable BC and the x, y, z components of reaction at A. Solution-Con’t (slide 3) M y 0; 3 M Ay 45 (12) (105) (12) 0 7 M Ay 0 M z 0; 2 6 M Az (105) (12) + (105) (4) = 0 7 7 M Az 720 lb ft Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-23 EML 3004C 4.7 Friction Friction is the force of resistance offered by a body that prevents or retards a body from motion relative to the first. Friction always acts tangent to the surface and opposing any possible motion. Friction is caused by small asperities as shown here. We should consider all the minor surface asperities to get a distributed load . Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-24 EML 3004C 4.7 Friction-2 Frictional coefficient changes from static to kinetic when the value reduces.. Consider the motion of the following structure. Seven unknowns: N A , FA , Bx , By , P, N c , Fc Two sets of 3 equations and Friction F = s N Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-25 EML 3004C 4.7 Friction-3 But we use simple law suggested by Coloumb for two possible cases. Impending (or possible) motion-statics Fs s N Actual motion-kinetic Fk k N First we still need to establish equilibirum to find N For static conditions, we use Ffriction s N For dynamics conditions, we use Ffriction k N Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-26 EML 3004C 4.7 Tipping or impending motion Tipping during motion or sliding depends if the clockwise moment at the bottom corner is CW or CCW. Evaluate the location of N with respect to W. Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-27 EML 3004C Example of pipes stacked The concrete pipes are stacked. Determine the minimum coefficient of static friction so that the pile does not collapse. Solution: Draw the Free body diagrams first. Top pipe M 0; F r F r 0 F F F 0;N sin 30 F cos30 N sin 30 F cos30 0 F 0;2 N cos30 2 F sin 30 W 0 0 x A A B A B B y Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-28 EML 3004C Example of pipes stacked Solution: Use F F and N N A A M 0; F r F .r 0 F F F 0; N sin 30 F cos30 F 0 (2) F 0;N W N cos30 F sin 30 0 (3) 0 C C x y C From (2), Bottom pipe Namas Chandra Introduction to Mechanical engineering s min F 0.268 N Hibbeler Chapter 4-29 EML 3004C Example of man on a plank Determine how far d the man can walk up the plank without causing the plank to slip. s between A and B is 0.3. Man weighs 200 lb. Solution: F 0; F F cos 30 N cos 60 0 F 0;2 N F sin 30 N sin 60 200 0 M 0; N cos10(15) F sin10(15) x A y B A A B B B B (2) B 200sin 20(3) 200 cos 20( d ) 0 Namas Chandra Introduction to Mechanical engineering (1) (3) Hibbeler Chapter 4-30 EML 3004C Example of man on a plank-2 Solution continued If the plank is on the verge of moving, slipping would occur at A. Hence FA N A and FB N B 0.3N B Substituting in eqns (1), (2) and (3), d 10.2 ft N A 110.09 lb and N B 88.14 lb Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-31 EML 3004C Problem 4-100 (page 192, Section 4.6-4.7) 4.100 Two boys, each weighing 60 lb, sit at the ends of a uniform board, which has a weight of 30 lb. If the board rests at its center on a post having a coefficient of static friction of ( sthe ) board, 0.6 determine the greatest angle of with tilt before slipping occurs. Neglect the size of post and the thickness of the board in the calculations. Solution: Fx 0; 0.6 N cos - N sin =0 tan = 0.6 = 31.0 Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-32 EML 3004C Problem 4-112 (page 195, Review Problems) 4.112 The horizontal beam is supported by springs at its ends. If the stiffness of the spring at A is k A 5 kN/m , determine the required stiffness of the spring at B so that if the beam is loaded with the 800-N force it remains in the horizontal position both before and after loading. Solution: Equilibrium: CCW + M A 0; FB (3) - 800 (1) = 0 FB 266.67 N CCW+ M B 0; 800(2) - FA (3)=0 FA 533.33 N Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-33 EML 3004C 4.112 The horizontal beam is supported by springs at its ends. If the stiffness of the spring at A is k A 5 kN/m, determine the required stiffness of the spring at B so that if the beam is loaded with the 800-N force it remains in the horizontal position both before and after loading. Solution-Con’t (slide 2) F Spring Force Formula: x k x A xB 533.33 266.67 5000 kB k B 2500 N/m=2.50 kN/m Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-34 EML 3004C Chapter 4: Equilibrium.. concludes Namas Chandra Introduction to Mechanical engineering Hibbeler Chapter 4-35