EE 382M VLSI–II: Advanced Circuit Design Lecture 12: I/O & ESD
advertisement

I/O & ESD Design
Byron Krauter, IBM
Mark McDermott
Outline
I/O Signaling Requirements
Basic CMOS I/O and Receiver Design
Real-world CMOS I/O and Receiver Design
– Impedance Matching & Slew Rate Control
– Mixed Voltages
– ESD and other extreme conditions
Increasing Bandwidth
–
–
–
–
–
Source Synchronous I/O or Co-transmitted Clock
Pipelined Bus or Bus Pumping
Dual Data Rate
Simultaneous Bi-Directional
Pattern Based Driver Compensation
Transmission Lines
3/12/2016
2
I/O Signaling
There are basically two forms of signaling used for input/output
applications
– Single Ended
– Differential
In single-ended signaling one wire carries a varying voltage that
represents the signal, while the other wire is connected to a
reference voltage, usually ground.
– Single ended signaling is less expensive to implement than differential, but
its main limitations are that it lacks the ability to reject noise caused by
differences in ground voltage level between transmitting and receiving
circuits.
Differential signaling uses two complementary signals sent on
two separate wires.
– Able to reject common-mode noise
– More expensive to implement from both a wire perspective as well as the
transmit & receive logic.
3/12/2016
3
Single Ended vs. Differential Signaling
Single Ended
Differential
3/12/2016
4
Single-ended Bus Signaling Standards
Courtesy Mike Morrow, UW
3/12/2016
5
Differential Bus Signaling Standards
Courtesy Mike Morrow, UW
3/12/2016
6
Complications
Pin Count Limitations
– Bi-directional signaling
– Simultaneous switching noise
Transmission Line Behavior
–
–
–
–
Limited net topologies work
Terminations required
Skin effect
Dielectric loss
Other Noises
– Reflections
– Discontinuity noise
– Crosstalk and connector noise
Mixed Voltages
ESD and Other Handling Complications
3/12/2016
7
Basic CMOS I/O and Receiver Design
Bidirectional CMOS I/O Buffer
enable_b
Pad
data
enable
0
1
data
3/12/2016
0
0
Hi Z
1
1
Hi Z
9
CMOS Input Receiver
Any two input gate that
– Has good noise immunity
– Provides on-chip control when off-chip inputs float
Example: two input NAND
enable
0
1
enable
Pad
data
3/12/2016
out
data
0
1
1
1
1
0
X
1
X
10
Real-world CMOS I/O Design
Real-world CMOS I/O Design
Output Impedance Control
Slew Rate Control
Mixed Voltage Designs
– Input Design for Higher Voltages
– Output Design for Higher Voltages
• Dual Power Supplies
• Floating Well Designs
• Open Source Signaling
Other Circuits
– Differential I/O Circuits
– Hysteresis Receivers
ESD Circuits
3/12/2016
12
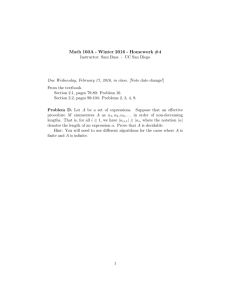
Output Impedance Control
Device “resistances” are too variable for source termination
– Devices are non-linear
– Variations due to VDD, Temp, and process variations alone are >2X in linear
region!
Output stages must be designed to reduce this variation
– On-chip resistors designs
– Logically tunable designs
3/12/2016
Impedance Control Using On-Chip Resistors
Given a precise on-chip resistor, this design provides the best
impedance control
enable_b
Pad
data
3/12/2016
14
Tunable Impedance Control
Stacked device settings can be preset or dynamically controlled
p1
p2
p3
enable_b
Pad
data
n1
3/12/2016
n2
n3
15
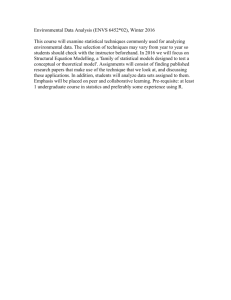
Slew Rate Control
Output stage slew rate is controlled to reduce noise
– Cross talk noise
– Simultaneous switching noise
– Reflections at discontinuities
Slew rate control is accomplished by controlling the pre-driver
delay and/or pre-driver strength
3/12/2016
16
Slew Rate Control
Output stage is divided and pre-drive signal is designed to
sequentially arrive at the different sections
d
d
enable_b
Pad
data
d
3/12/2016
d
17
Slew Rate Control & Impedance Control
Pre-driver design might even permit crossover currents to
guarantee impedance even during switching
d
enable_b
data
Pad
d
d
d
3/12/2016
d
d
Feedback Slew Rate Control I/O Buffer
enable_b
Pad
data
3/12/2016
19
Feedback Slew Rate Control I/O Buffer (Patents)
3/12/2016
20
Mixed Voltage Designs
Needed when chips have different supply voltages
Low voltage circuits can be damaged by high voltage inputs
High voltage circuits suffer delay & noise problems when receiving
low voltage signals
VDD_1
Bi-directional
I/O Buffers
newer
technology
older
technology
VDD_1 < VDD_2
3/12/2016
VDD_2
Input Design for Higher Voltages
Modifications for gate oxide & ESD protection
Receiving Same Level
Receiving Higher Level
ESD Diodes
ESD Diodes
Pad
Pad
change beta ratio
3/12/2016
Dual Supply Designs
Separately power I/O circuits at a lower voltage
– No additional process steps required
– Extra design to avoid performance penalty
– ESD & simultaneous switching noise compromised
VDD_1
newer
technology
3/12/2016
Bi-directional
I/O Buffers
VDD_1
VDD_2
older
technology
Output Stage at a Lower Voltage
Slow rising delay due to low overdrive on PMOS
Reduced drive = reduced noise immunity on NAND receiver
Vdd2
enable_b
Vdd1
Vdd1 or Vdd2
ESD Diodes
Pad
data
inhibit
3/12/2016
24
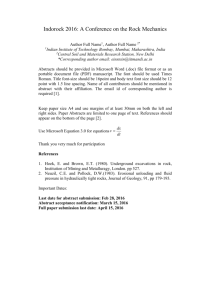
Output Stage at a Lower Voltage
Improve rising delay with NMOS pull up
Change p/n beta ratio on NAND to lower switch point
1.8 Volts
enable_b
1.2 Volts
1.2 or 1.8 Volts
ESD Diodes
Pad
data
Inhibit_b
3/12/2016
change beta ratio
25
Dual Supply Designs
Separately power the I/O circuits at a higher voltage
– More complicated circuits
– ESD & simultaneous switching noise compromised
1.2 Volts 1.8 Volts
newer
technology
3/12/2016
Bi-directional
I/O Buffers
1.8 Volts
older
technology
26
Output Stage at a Higher Voltage
Slow rising delay due to low overdrive on PMOS
Reduced drive = reduced noise immunity on NAND receiver
Vdd2
Vdd1
enable_b
Level
Shifter
Vbias
Pad
data
Vdd1
3/12/2016
Vdd2
Floating Well Designs
Enabled output stage outputs a lower voltage -> Vdd1
Disabled output stage tolerates higher voltage -> Vdd2
Vdd1
enable
Vdd1
Vdd1
Pad
data
Vdd1
3/12/2016
Open Drain Signaling
Avoids complexity of multiple chip power supplies
– Off-chip termination resistors pull net up
– On-chip NMOS devices pull net down
Increases transmission line design complexity
Wired OR functionality
Driving Chip
Vtt
Vtt
CL
3/12/2016
CL
CL
CL
CL
29
Other Circuits
Differential I/O Circuits
–
–
–
–
Reduces simultaneous switching noise
Improves receiver common mode noise immunity
Receives smaller signal levels
“Pseudo” to full differential possible
Hysteresis Receivers
– High noise immunity
– Excellent for low-speed asynchronous test & control signals
Hold Clamps
3/12/2016
30
Differential Output Buffers
Pseudo Differential Outputs
out
Differential Outputs
VDD
out
out
out
Vbias
3/12/2016
31
Differential Transmission Lines
Pseudo = two lines
Zo
Zo
Differential = coupled pair
Zeff < Zo
coupled
Zeff < Zo
3/12/2016
32
Differential Far End Termination
Pseudo Differential Termination
Vtt
R = Zo
Vtt
R = Zo
Differential Termination
R = 2 Zo
3/12/2016
33
Differential Receivers
Pseudo Differential Receiver
out
Differential Receiver
VDD
out
out
out
Vbias
3/12/2016
34
Self Biased Differential Receiver
Combines best of NMOS and PMOS differential receivers
VDD
VDD
out out
Pbias
out out
Nbias
3/12/2016
35
Self Biased Differential Receiver
Combines best of NMOS and PMOS differential receivers
– Rail to rail output swing
– Excellent common mode noise rejection
VDD
out
or reference
(Bazes, JSSC 91)
3/12/2016
36
Hysteresis Input Receivers
Separates rising & fall edge dc transfer curves
weak feedback inverter
Pad
Vin
Vout
inhibit
Pad
Vin
Vout
Vout
falling
rising
AND only
Vin
3/12/2016
37
Hold Clamps
Weak clamps hold tri-stated source terminated nets
weak feedback inverter
Pad
VDD
I/O
Stronger clamps will actively terminate the net
– Can be slower than passive termination schemes
3/12/2016
38
ESD Design
Pins subjected to ESD (electrostatic discharge) events during test
& handling
Over-voltages can also occur during functional operation
– System power-on
– Hot-plugging
ESD discharge can occur between any two pins
– I/O to I/O
– I/O to VDD or Gnd
Pins are measured against standard ESD tests
– Human body model
– Machine model
– Charged Device Model
ESD performance depends on many parameters other circuits
don’t care about
3/12/2016
39
ESD Circuits
Non-breakdown based circuits
– Diodes
– Bipolar Junction Transistor
– MOSFET
Breakdown based circuits
– Thick Field Oxide Device
– SCR (silicon controlled rectifier)
3/12/2016
Dual Diode ESD Circuits
Mixed voltage design
Single Supply Design
ESD Diodes
Pad
3/12/2016
ESD Diodes
Pad
41
FET ESD Circuits: non-breakdown mode
NMOS in “diode”
configuration
ESD Diodes
Pad
3/12/2016
42
FET ESD Circuits: breakdown mode
ESD Diodes
Pad
second
breakdown
I
NMOS protects
by clamping voltage
after device snapback
snapback
Vgs > Vt
V
3/12/2016
43
Diode ESD Circuits
FET devices are parasitic npn & pnp bipolar circuits
• vertical pnp device to substrate
• horizontal npn device to guard rings (before trench isolation)
• low vdd to gnd impedance to due on-chip capacitance
provide additional discharge paths
ESD Diodes
Pad
3/12/2016
ESD bipolar devices
Pad
44
Parasitic Bipolar Circuits
FET devices are parasitic npn & pnp bipolar circuits
• vertical pnp device to substrate
3/12/2016
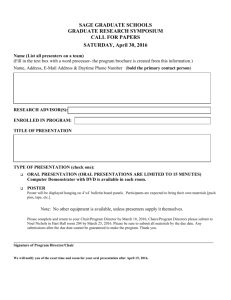
ESD Test Models
Human Body Model
– Requirements 2 - 4 kVolts
– Positive or negative discharge between any two pins
VHBM
R = 1.5 KW
DUT
C = 100 pF
ipeak = VHBM/1500
i(t)
t = 2-10 nsec
3/12/2016
time
ESD Test Models
Machine Model
– Requirements 200 - 400 Volts
– Positive or negative discharge between any two pins
L = 0.5 - 0.75 mH
VMM
DUT
R < 8.5 W
C = 200 pF
3/12/2016
ESD Performance Factors
Diode symmetry is important
– Bipolar conduction increases with temperature
– Hot spots conduct more, heat up more, conduct more, … and finally burn out
Layout corners are rounded to reduce electric fields
Decoupling capacitance needed between all supplies
Functional performance requirements impose ESD size & load
capacitance constraints
Parasitic bipolar effects abound
Breakdown clamps don’t scale
Virtual supply node needed for multi-VDD designs
3/12/2016
Increasing Bandwidth
3/12/2016
Common Clock Transfers
Chip to chip transfers controlled by common bus clock
Equal length card routes to each chip & on-chip PLL’s minimize
clock skew
Chip A
PLL
PLL
Chip B
clock
source
3/12/2016
50
Common Clock Transfers
Cycle time to meet setup time
max(Tclk - A+TAclk +Tdrive+ Ttof+ Treceive + Tsetup ) - min(TBclk - Tclk - B) < Tcycle
Chip A
PLL
Tdrive
Ttof
TAclk
Treceive
PLL
Tsetup
TBclk
Chip B
Tclk - A
Tclk - B
clock
source
3/12/2016
51
Source Synchronous I/O
Send source clock with source data
Resolve clock phase differences with t1, t2, & t3
Chip B
Chip A
PLL
t1
t3
t2
PLL
clock
source
3/12/2016
52
Bus Pumping
With Ttof > Tcycle, multiple bits are present on the wire
Chip B
Chip A
PLL
t1
t3
t2
PLL
clock
source
3/12/2016
53
Dual Data Rate
Conventional source synchronous design
– Data launched & captured on single clock edge
– Clock switches at f
– Maximium data rate = 1/2 * f
Dual data rate - if clock can switch at f, why not data?
– Data is launched & captured on both clock edges
– Clock switches f
– Maximum data rate = f
Conventional
Dual Data Rate
Clock
Data
3/12/2016
54
Simultaneous Bidirectional Signaling
Two chips send & receive data simultaneously on a point to point
net
Waveforms superimpose on the transmission line
Each chip selects it’s receiver reference voltage based on the data
it sent
Sending data is subtracted from total waveform
Chip A
3/4 VDD
1/4 VDD
3/12/2016
Chip B
3/4 VDD
1/4 VDD
55
Pattern Based Driver Compensation
Incident waveforms along a long-lossy lines attenuate
Slow “RC” like response to final level
Rs = Zo
Vs
tf
where tf = length / velocity
With complex impedance and propagation constant
high speed wavefront decays exponentially
1/2
(1- e-R*length/2Zo)
3/12/2016
56
Pattern Based Driver Compensation
Adjust driver strength based on bits sent in earlier cycles
Example: When driving low to high
– Drive harder if previous bits sent = 00
– Drive weaker if previous bits sent = 10
Without Compensation
1
0
0
1 0 0
With Compensation
1
0
0
1 0 0
Receiver
Switch Point
Drive harder
3/12/2016
57
Increasing Bandwidth
Preceding techniques cannot be achieved through clever circuit
design alone
Requires good packaging technology & net design
–
–
–
–
Good termination
Minimal capacitive & inductive discontinuities
Low cross-talk
Low simultaneous switching noise
3/12/2016
58
Backup
Transmission Line Behavior
But First A Few Words on
Common Ground Interconnect Models
Example - Two Wires & One Source
Twin lead transmission line modeled as a single section and
driven by a Thevenin source
Rsource
0.5*Cwire
L11
M12
L22
3/12/2016
Rwire
0.5*Cwire
Rwire
62
Example - Two Wires & One Source
Being concerned with local potentials only (i.e. capacitor
potentials) inductances and resistances can be combined
Rsource
L11
0.5*Cwire
Rsource
0.5*Cwire
3/12/2016
Rwire
L22
Rwire
0.5*Cwire
M12
L11+ L22 - 2*M12
2*Rwire
0.5*Cwire
63
Example - Three Wires & Two Sources
When multiple wires form a cutset, treat one wire as a reference
lead and fold it into the other wires*.
Rs1
L11
R1
Cutset
0.5*C1g
M1g
0.5*C1g
Rg
0.5*C12
0.5*C12 M12 Lgg
0.5*C2g
Rs2
M2g
L22
0.5*C2g
R2
* Brian Young, “Digital Signal Integrity: Modeling and Simulation
with Interconnects and Packages”
3/12/2016
64
Example - Three Wires & Two Sources
Resulting loop impedance model for three parallel wires driven
by two Thevenin sources
mutual resistances
L11+Lgg-2M1g
Rs1
R1+Rg
v1
i2Rg
0.5*C1g
0.5*C1g
M12-M1g-M2g+Lgg
0.5*C12
v2
0.5*C12
i1Rg
L22+Lgg-2M1g
Rs2
0.5*C1g
3/12/2016
R2+Rg
0.5*C2g
65
Transmission Line Behavior
On and off chip signals can always be modeled with lumped RLC
circuits
Wire segments are modeled with p or t segments
L, R, C, and G can be frequency dependent
But inductance is not always important
3/12/2016
66
Transmission Line Behavior
Inductance is important when
– Driver source impedance Rs is low
Rs < Z o
where Zo = characteristic impedance of line
– Driver rise time tr is fast
– Line loss is low
tr < 2.5 tf
where tf = time of flight
R << jwL or (R / 2Zo) << 1
Can be restated for point to point nets as
RsCtot < 1/2 RlineCline < tf
3/12/2016
Wave front
decays exponentially
with this constant
67
When Inductance is Important
Nets ring and net delays become unpredictable unless:
– Net topologies are constrained
• Point to point nets
• Periodically loaded nets
• Near and far end clusters
– Nets are driven appropriately
• Not to strong and not to weak
• Not to fast and not to slow
– Nets are terminated appropriately
• Source termination
• Far end termination
– Resistance to VDD or Gnd or any Thevenin Voltage
• AC termination = RC circuit
• Active hold clamps
• Diode or Schottky diode clamps
3/12/2016
68
Transmission Line Behavior
Perfectly source terminated point to point, loss-less net
tf
Rs = Zo
Zo = L
C
tf =
LC
far end
V(t)
near end
tf
time
3/12/2016
69
Transmission Line Behavior
Under driven point to point, loss-less net
Rs = 3Zo
tf
Zo = L
C
tf =
LC
Approximates
RC step response
far end
V(t)
near end
time
3/12/2016
70
Transmission Line Behavior
Over driven point to point, loss-less net
Rs = 1/3 Zo
tf
Zo = L
C
tf =
LC
far end
V(t)
near end
time
3/12/2016
71
Reflection and Transmission
With incident wave Vinc traveling down the line
Voltage reflection coefficient
Gv =
ZL - Zo
ZL+ Zo
Gv =
{
1,
ZL =
0,
-1,
ZL= Zo
ZL= 0
Voltage transmission coefficient
Tv = 1 + Gv =
3/12/2016
2ZL
ZL+ Zo
72
Equivalent Circuits Along Line
Rs
Vs
near end
+
Zo Vinc
Zo
2Vinc
along line
Zo
Zdiscontinuity
Zo
2Vinc
3/12/2016
far end
ZL
73
Discontinuities Along Line
Rs = Zo
1
C
Vs
3/12/2016
1/2
1/2 (1- e-2t/ZoC)
Rs = Zo
Vs
Vs=1
1
Vs=1
1/2
L
1- 1/2(1- e-2Zot/L)
74
Well Behaved Net Topologies
Point to Point Nets
Rs = Zo
Rs << Zo
3/12/2016
tf
tf
Source terminated
Far end terminated
Vterm
Rterm @ Zo
Well Behaved Net Topologies
Periodically Loaded Nets
Source terminated: Near end switches last
Rs = Zeff
CL
With periodic loading
CL
CL
Zeff =
L
C + nCL
tf =
3/12/2016
L(C+nCL)
CL
Well Behaved Net Topologies
Periodically Loaded Nets
Far end terminated: Near end switches first
Rterm @ Zeff
Vterm
Rs << Zeff
CL
With periodic loading
CL
CL
Zeff =
tf =
3/12/2016
CL
L
C + nCL
L(C+nCL)
Well Behaved Net Topologies
Near end (or Star) cluster
Rs = Zo/N
3/12/2016
Well Behaved Net Topologies
Far-end cluster
Rs = Zo/N
3/12/2016
Zo/N
Well Behaved Net Topologies
Double far-end terminated bus
Rs << Zo
Vterm
Vterm
CL
3/12/2016
CL
CL
CL
CL
Ideal Transmission Lines
I(z)
i
V
C
z
t
V
i
L
z
t
V(z)
V Re [V
Steady State Solution:
where
3/12/2016
Ideal
Telegrapher’s Equation
2V
2V
LC 2
2
z
t
j (gz wt )
e
V
e
j (gz wt )
]
1
j (gz wt )
j (gz wt )
I Re ( [V e
V e
])
Z
Z=
L
C
g = w LC
81
Transmission Lines with Loss
Z(w) =
@
jwL + R
jwC
L
(1 - j R/2w L)
C
R
Z (w ) Z 0 j
2w C Z0
3/12/2016
j g (w) = (jwL + R) jwC
@ jw
LC (1 - j R/2w L)
R
g (w ) w LC
2 Z0
82
Waveforms Along a Low Loss Line
Rs << Zo
Vs
tf
where tf = length / velocity
With complex impedance & complex propagation constant
high speed wavefront decays exponentially & distorts
1
(1- e-R*length/2Zo)
3/12/2016
83
Distortionless Transmission Line
Oliver Heaviside (1887)
G/C R/ L
Z(w) =
3/12/2016
jwL + R
jwC + G
L
C
j g (w) =
(jwL + R)(jwC + G)
LC ( jw R /L)
84
Waveforms Along a Distortionless Line
Rs << Zo
Vs
tf
where tf = length / velocity
With real impedance and complex propagation constant
high speed wavefront decays exponentially but without distortion
1
(1- e-R*length/Zo)
3/12/2016
85