ch05
advertisement

Digital Design
Chapter 5:
Register-Transfer Level
(RTL) Design
Slides to accompany the textbook Digital Design, First Edition,
by Frank Vahid, John Wiley and Sons Publishers, 2007.
http://www.ddvahid.com
Copyright © 2007 Frank Vahid
Instructors of courses requiring Vahid's Digital Design textbook (published by John Wiley and Sons) have permission to modify and use these slides for customary course-related activities,
subject to keeping
this copyright
notice in place and unmodified. These slides may be posted as unanimated pdf versions on publicly-accessible course websites.. PowerPoint source (or pdf
Digital
Design
with animations) may not be posted to publicly-accessible websites, but may be posted for students on internal protected sites or distributed directly to students by other electronic means.
Copyright © 2006
1
Instructors may make printouts of the slides available to students for a reasonable photocopying charge, without incurring royalties. Any other use requires explicit permission. Instructors
Franksource
Vahidor obtain special use permissions from Wiley – see http://www.ddvahid.com for information.
may obtain PowerPoint
5.1
• Chapter 3: Controllers
– Control input/output: single bit (or just a
few) representing event or state
– Finite-state machine describes
behavior; implemented as state register
and combinational logic
bi
bo
Combinational
logic
n1
s1
FSM
outputs
FSM
inputs
Introduction
n0
s0
State register
clk
• Chapter 4: Datapath components
– Data input/output: Multiple bits
collectively representing single entity
– Datapath components included
registers, adders, ALU, comparators,
register files, etc.
• This chapter: custom processors
– Processor: Controller and datapath
components working together to
implement an algorithm
Register
si
bi
ansis
ALU
bo
e
z
Combinational
logic
Comparator
Register file
Register file
n1
n0
s1 s0
State register
ALU
Datapath
Digital Design
Copyright © 2006
Frank Vahid
Controller
Note: Slides with animation are denoted with a small red "a" near the animated items
2
RTL Design: Capture Behavior, Convert to Circuit
• Recall
– Chapter 2: Combinational Logic Design
• First step: Capture behavior (using equation
or truth table)
• Remaining steps: Convert to circuit
– Chapter 3: Sequential Logic Design
Capture behavior
• First step: Capture behavior (using FSM)
• Remaining steps: Convert to circuit
• RTL Design (the method for creating
custom processors)
Convert to circuit
– First step: Capture behavior (using highlevel state machine, to be introduced)
– Remaining steps: Convert to circuit
Digital Design
Copyright © 2006
Frank Vahid
3
RTL Design Method
Digital Design
Copyright © 2006
Frank Vahid
5.2
4
RTL Design Method: “Preview” Example
• Soda dispenser
– c: bit input, 1 when coin
deposited
c
– a: 8-bit input having value of
d
deposited coin
– s: 8-bit input having cost of a
soda
– d: bit output, processor sets to
1 when total value of
deposited coins equals or
0 1 0 1 0
exceeds cost of a soda
c
d
0 1 0
Digital Design
Copyright © 2006
Frank Vahid
How can we precisely describe this
processor’s behavior?
s
a
Soda
dispenser
processor
s
50
a 25
25
Soda tot:
tot:
dispenser
25
processor50
a
5
Preview Example: Step 1 -Capture High-Level State Machine
• Declare local register tot
• Init state: Set d=0, tot=0
• Wait state: wait for coin
– If see coin, go to Add state
• Add state: Update total value:
tot = tot + a
– Remember, a is present coin’s
value
– Go back to Wait state
• In Wait state, if tot >= s, go to
Disp(ense) state
• Disp state: Set d=1 (dispense
soda)
– Return to Init state
Digital Design
Copyright © 2006
Frank Vahid
s
a
8
c
d
8
Soda
dispenser
processor
Inputs: c (bit), a (8 bits), s (8 bits)
Outputs: d (bit)
Local registers: tot (8 bits)
c
Add
Init
d=0
tot=0
Wait
c’*(tot<s)’
tot=tot+a
c’*(tot<s)
Disp
d=1
6
Preview Example:
Step 2 -- Create Datapath
• Need tot register
• Need 8-bit comparator
to compare s and tot
• Need 8-bit adder to
perform tot = tot + a
• Wire the components
as needed for above
• Create control
input/outputs, give
them names
c
Add
Init
Wait
d=0
t ot=0
c‘
(t ot<s)‘
tot= t ot+a
c‘ *(tot<s)
Disp
d=1
s
tot_ld
a
ld
clr
tot_clr
8
tot_lt_s
Digital Design
Copyright © 2006
Frank Vahid
Inputs : c (bit), a(8 bits), s (8 bits)
Outputs : d (bit)
Local reg isters: t ot (8 bits)
tot
8
8-bit
<
Datapath
8
8-bit
adder
8
7
Preview Example: Step 3 –
Connect Datapath to a Controller
• Controller’s inputs
s
tot_ld
– External input c
(coin detected)
– Input from datapath
comparator’s output,
which we named
tot_lt_s
a
ld
clr
tot_clr
8
8
8-bit
<
tot_lt_s
Datapath
s
tot
8
8-bit
adder
8
a
8
8
• Controller’s outputs
– External output d
(dispense soda)
– Outputs to datapath
to load and clear the
tot register
c
d
tot_ld
tot_clr
Controller
Digital Design
Copyright © 2006
Frank Vahid
tot_lt_s
Datapath
8
Preview Example: Step 4 – Derive the Controller’s
FSM
Digital Design
Copyright © 2006
Frank Vahid
d
tot_ld
tot_clr
Datapath
c
Controller
• Same states
and arcs as
high-level
state machine
• But set/read
datapath
control
signals for all
c
datapath
operations d
and
conditions
s a
8 8
tot_lt_s
s
Inputs::c, tot_lt_s(bit)
Outputs:d, tot_ld, tot_clr (bit)
tot_ld
tot_ld
tot_clr
c
Add
Init
d=0
tot_clr=1
Wait
tot_ld=1
c’*tot_lt_s
a
ld
tpt
clr
8
8
tot_clr
tot_lt_s tot_lt_s
8-bit
<
Datapath
8
8-bit
adder
8
Disp
Controller
d=1
9
Preview Example: Completing the Design
n0
d
tot_clr
0
0
1
0
0
1
0
1
0
1
0
0
1
0
1
0
0
1
0
0
1
0
0
1
1
0
1
0
0
1
0
1
0
0
1
1
0
0
0
0
0
1
0
1
0
0
1
0
0
1
0
0
0
0
0
0
0
1
0
0
Add
0
1
1
0
0
1
1
1
1
1
0
Disp
1
1
0
0
0
0
1
0
0
Init
n1
tot_ld
– As in Ch3
– Table shown on right
tot_lt_s
• Implement the FSM as
a state register and
logic
tot_ld
c
d
c
Init
Wait
d=0
tot_clr=1
Add
tot_clr
tot_ld=1
tot_lt_s
c’*tot_lt_s
Disp
Controller
Digital Design
Copyright © 2006
Frank Vahid
Wait
Inputs::c, tot_lt_s(bit)
Outputs:d, tot_ld, tot_clr (bit)
s1
s0
c
0
0
0
0
0
0
0
1
0
0
d=1
10
Step 1: Create a High-Level State Machine
• Let’s consider each step of the
RTL design process in more
detail
Inputs: c (bit), a (8 bits), s (8 bits)
Outputs: d (bit)
• Step 1
– Soda dispenser example
– Not an FSM because:
• Multi-bit (data) inputs a and s
• Local register tot
• Data operations tot=0, tot<s,
tot=tot+a.
– Useful high-level state machine:
• Data types beyond just bits
• Local registers
• Arithmetic equations/expressions
Digital Design
Copyright © 2006
Frank Vahid
Local registers: tot (8 bits)
c
Init
d=0
tot=0
Wait
c’(tot<s)’
tot= tot+a
c’ (tot<s)
Disp
d=1
11
Step 1 Example: Laser-Based Distance Measurer
T (in seconds)
laser
D
Object of
interest
sensor
2D = T sec * 3*108 m/sec
• Example of how to create a high-level state machine to
describe desired processor behavior
• Laser-based distance measurement – pulse laser,
measure time T to sense reflection
– Laser light travels at speed of light, 3*108 m/sec
– Distance is thus D = T sec * 3*108 m/sec / 2
Digital Design
Copyright © 2006
Frank Vahid
12
Step 1 Example: Laser-Based Distance Measurer
T (in seconds)
laser
sensor
from button
B
D
to display
L
16
Laser-based
distance
measurer
to laser
S
from sensor
• Inputs/outputs
–
–
–
–
B: bit input, from button to begin measurement
L: bit output, activates laser
S: bit input, senses laser reflection
D: 16-bit output, displays computed distance
Digital Design
Copyright © 2006
Frank Vahid
13
Step 1 Example: Laser-Based Distance Measurer
from button B
L
Inputs: B, S(1 bit each)
Outputs: L (bit), D (16 bits)
to display
S0
a
D
16
Laserbased
distance
measurer
S
to laser
from sensor
?
L = 0 (laser off)
D = 0 (distance = 0)
• Step 1: Create high-level state machine
• Begin by declaring inputs and outputs
• Create initial state, name it S0
– Initialize laser to off (L=0)
– Initialize displayed distance to 0 (D=0)
Digital Design
Copyright © 2006
Frank Vahid
14
Step 1 Example: Laser-Based Distance Measurer
from button B
Inputs: B, S (1 bit each)
Outputs: L (bit), D (16 bits)
B’ (button not pressed)
to display
D
L
16
Laserbased
distance
measurer
S
to laser
from sensor
a
S0
?
S1
L=0
D=0
B
(button
pressed)
• Add another state, call S1, that waits for a button press
– B’ – stay in S1, keep waiting
– B – go to a new state S2
Q: What should S2 do?
Digital Design
Copyright © 2006
Frank Vahid
A: Turn on the laser
a
15
Step 1 Example: Laser-Based Distance Measurer
from button B
Inputs: B, S (1 bit each)
Outputs: L (bit), D (16 bits)
to display
D
L
Laserbased
distance
measurer
16
S
to laser
from sensor
B’
S0
L=0
D=0
S1
B
S2
S3
L=1
(laser on)
L=0
(laser off)
a
• Add a state S2 that turns on the laser (L=1)
• Then turn off laser (L=0) in a state S3
Q: What do next? A: Start timer, wait to sense reflection
a
Digital Design
Copyright © 2006
Frank Vahid
16
Step 1 Example: Laser-Based Distance Measurer
Inputs: B, S (1 bit each) Outputs: L (bit), D (16 bits)
from button
Local Registers: Dctr (16 bits)
to display
B’
B
D
L
16
Lase
r-based
distance
measu
rer
S
to laser
from sensor
S’ (no reflection)
S0
S1
L=0
D=0
Dctr = 0
(reset cycle
count)
B
S2
L=1
S3
S (reflection)
?
L=0
Dctr = Dctr + 1
(count cycles)
a
• Stay in S3 until sense reflection (S)
• To measure time, count cycles for which we are in S3
– To count, declare local register Dctr
– Increment Dctr each cycle in S3
– Initialize Dctr to 0 in S1. S2 would have been O.K. too
Digital Design
Copyright © 2006
Frank Vahid
17
Step 1 Example: Laser-Based Distance Measurer
from button
Inputs: B, S (1 bit each) Outputs: L (bit), D (16 bits)
Local Registers: Dctr (16 bits)
to display
B
D
L
16
Lase
r-based
distance
measu
rer
S
to laser
from sensor
S’
B’
a
S0
S1
L=0
D=0
Dctr = 0
B
S2
L=1
S3
S
S4
L=0
D = Dctr / 2
Dctr = Dctr + 1 (calculate D)
• Once reflection detected (S), go to new state S4
– Calculate distance
– Assuming clock frequency is 3x108, Dctr holds number of meters, so
D=Dctr/2
• After S4, go back to S1 to wait for button again
Digital Design
Copyright © 2006
Frank Vahid
18
Step 2: Create a Datapath
• Datapath must
– Implement data storage
– Implement data computations
• Look at high-level state machine, do
three substeps
– (a) Make data inputs/outputs be datapath
inputs/outputs
– (b) Instantiate declared registers into the
datapath (also instantiate a register for each
data output)
– (c) Examine every state and transition, and
instantiate datapath components and
connections to implement any data
computations
Digital Design
Copyright © 2006
Frank Vahid
Instantiate: to
introduce a new
component into a
design.
19
Step 2 Example: Laser-Based Distance Measurer
Inputs: B, S (1 bit each)
Outputs: L (bit), D (16 bits)
(a) Make data
Local Registers: Dctr (16 bits)
inputs/outputs be
datapath
B‘
S‘
inputs/outputs
(b) Instantiate declared
S4
S0
S1
S2
S3
registers into the
B
S
datapath (also
L=0
Dctr = 0
L=1
L=0
D = Dctr / 2
instantiate a
D=0
Dctr = Dctr + 1 (calculate D)
register for each
a
data output)
Datapath
(c) Examine every
Dreg_clr
state and
Dreg_ld
transition, and
clear
clear
I
Dctr_clr
instantiate
Dctr: 16-bit
Dreg: 16-bit
count
Dctr_cnt
load
up-counter
register
datapath
Q
Q
components and
connections to
implement any
16
data computations
D
Digital Design
Copyright © 2006
Frank Vahid
20
Step 2 Example: Laser-Based Distance Measurer
(c) (continued)
Examine every
state and
transition, and
instantiate
datapath
components and
connections to
implement any
data computations
Inputs: B, S (1 bit each) Outputs: L (bit), D (16 bits)
Local Registers: Dctr (16 bits)
B‘
S‘
S0
S1
L=0
D=0
Dctr = 0
B
S2
L=1
S3
S
S4
L=0
D = Dctr / 2
Dctr = Dctr + 1 (calculate D)
a
Datapath
>>1
16
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
clear
count
clear
Dctr: 16-bit
up-counter
I
load
Q
Dreg: 16-bit
register
Q
16
16
D
Digital Design
Copyright © 2006
Frank Vahid
21
Step 2 Example Showing Mux Use
Localregisters:
E,F, G, R (16 bits)
E
F
G
E
F
G
T0 R = E + F
A
+
B
A
+
T1 R = R + G
add_A_s0
add_B_s0
F
1
2×
A
a
(a)
B
E
R
R
(b)
(c)
G
1
2×
+
B
R
(d)
• Introduce mux when one component input can come from
more than one source
Digital Design
Copyright © 2006
Frank Vahid
22
Step 3: Connecting the Datapath to a Controller
from button
L
B
Controller
from sensor
S
Dreg_clr
Dreg_ld
Dctr_clr
Datapath
Dctr_cnt
D
to display
16
to laser
300 MHz Clock
• Laser-based distance
measurer example
• Easy – just connect all
control signals
between controller and
datapath
Datapath
>>1
16
Dreg_clr
Dreg_ld
Dctr_clr
Dctr_cnt
clear
count
Q
Digital Design
Copyright © 2006
Frank Vahid
clear
load
Dctr: 16-bit
up-counter
16
I
Dreg: 16-bit
register
Q
16
D
23
Step 4: Deriving the Controller’s FSM
from butt on
Inputs: B, S (1 bit each)
Outputs: L (bit), D (16 bits)
Local Registers: Dctr (16 bits)
L
B
to laser
Controller
from sensor
S
Dreg_clr
B’
Dreg_ld
Dctr_clr
Datapath
Dctr_cnt
D
to display
16
S’
300 MHz Clock
S0
S1
L=0
D=0
Dctr = 0
S2
B
L=1
Inputs: B, S
• FSM has same
Outputs: L, Dreg_clr, Dreg_ld, Dctr_clr, Dctr_cnt
structure as highB’
level state machine
– Inputs/outputs all
bits now
– Replace data
operations by bit
operations using
datapath
Digital Design
Copyright © 2006
Frank Vahid
S3
S
S4
L=0
D = Dctr / 2
Dctr = Dctr + 1 (calculate D)
S’
a
S0
S1
L=0
Dreg_clr = 1
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser off)
(clear D reg)
L=0
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 1
Dctr_cnt = 0
(clear count)
B
S
S2
S3
L=1
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser on)
L=0
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 1
(laser off)
(count up)
S4
L=0
Dreg_clr = 0
Dreg_ld = 1
Dctr_clr = 0
Dctr_cnt = 0
(load D reg with Dctr/2)
(stop counting)24
Step 4: Deriving the Controller’s FSM
B’
• Using
shorthand of
outputs not
assigned
implicitly
assigned 0
S’
S0
S1
L=0
Dreg_clr = 1
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser off)
(clear D reg)
L=0
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 1
Dctr_cnt = 0
(clear count)
Inputs: B, S
B
S
S2
S3
L=1
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 0
(laser on)
L=0
Dreg_clr = 0
Dreg_ld = 0
Dctr_clr = 0
Dctr_cnt = 1
(laser off)
(count up)
S4
L=0
Dreg_clr = 0
Dreg_ld = 1
Dctr_clr = 0
Dctr_cnt = 0
(load D reg with Dctr/2)
(stop counting)
Outputs: L, Dreg_clr, Dreg_ld, Dctr_clr, Dctr_cnt
B’
S’
a
S0
S1
L=0
Dreg_clr = 1
(laser off)
(clear D reg)
Dctr_clr = 1
(clear count)
Digital Design
Copyright © 2006
Frank Vahid
B
S
S2
S3
L=1
(laser on)
L=0
Dctr_cnt = 1
(laser off)
(count up)
S4
Dreg_ld = 1
Dctr_cnt = 0
(load D reg with Dctr/2)
(stop counting)
25
Step 4
L
Dreg_clr
Dreg_ld
Dctr_clr
Datapath
B
Controller
from button
S
to laser
from sensor
>>1
16
Dreg_clr
Dreg_ld
clear
count
Dctr_clr
Dctr_cnt
Dctr_cnt
to display
Datapath
D
16
Q
300 MHz Clock
clear
load
Dctr: 16-bit
up-counter
16
I
Dreg: 16-bit
register
Q
16
D
Inputs: B, S
Outputs: L, Dreg_clr, Dreg_ld, Dctr_clr, Dctr_cnt
B’
S0
S1
L=0
Dreg_clr = 1
(laser off)
(clear D reg)
Dctr_clr = 1
(clear count)
Digital Design
Copyright © 2006
Frank Vahid
S’
B
S
S2
S3
L=1
(laser on)
L=0
Dctr_cnt = 1
(laser off)
(count up)
• Implement
S4
FSM as state
register and
Dreg_ld = 1
Dctr_cnt = 0
logic (Ch3) to
(load D reg with Dctr/2)
complete the
(stop counting)
design
26
5.3
RTL Design Examples and Issues
• We’ll use several more
examples to illustrate RTL
design
• Example: Bus interface
– Master processor can read
register from any peripheral
• Each register has unique 4-bit
address
• Assume 1 register/periph.
– Sets rd=1, A=address
– Appropriate peripheral places
register data on 32-bit D lines
• Periph’s address provided on
Faddr inputs (maybe from DIP
switches, or another register)
Digital Design
Copyright © 2006
Frank Vahid
Master
processor
rd
Per0
32
D
4
A
Per1
Per15
to/from processor bus
rd
D
A
32
4
Faddr
Bus interface
4
Q
32
Main part
Peripheral
27
RTL Example: Bus Interface
Inputs: rd (bit); Q (32 bits); A, Faddr (4 bits)
Outputs: D (32 bits)
Local register: Q1 (32 bits)
rd’
((A = Faddr)
and rd’)
WaitMyAddress
(A = Faddr)
and rd
D = “Z”
Q1 = Q
rd
SendData
D = Q1
• Step 1: Create high-level state machine
– State WaitMyAddress
• Output “nothing” (“Z”) on D, store peripheral’s register value Q into local
register Q1
• Wait until this peripheral’s address is seen (A=Faddr) and rd=1
– State SendData
• Output Q1 onto D, wait for rd=0 (meaning main processor is done
reading the D lines)
Digital Design
Copyright © 2006
Frank Vahid
28
RTL Example: Bus Interface
Inputs: rd (bit); Q (32 bits); A, Faddr (4 bits)
Outputs: D (32 bits)
Local register: Q1 (32 bits)
rd’
((A = Faddr)
and rd’)
WaitMyAddress
(A = Faddr)
and rd
D = “Z”
Q1 = Q
Digital Design
Copyright © 2006
Frank Vahid
rd
SendData
D = Q1
29
RTL Example: Bus Interface
Inputs: rd (bit); Q (32 bits); A, Faddr (4 bits)
Outputs: D (32 bits)
Local register: Q1 (32 bits)
rd’
((A = Faddr)
and rd)’
SendData
WaitMyAddress
(A = Faddr)
D = Q1
and rd
D = “Z”
Q1 = Q
A
rd
4
Faddr
Q
4
32
Q1_ld
ld Q1
= (4-bit)
A_eq_Faddr
D_en
• Step 2: Create a datapath
(a) Datapath inputs/outputs
(b) Instantiate declared registers
(c) Instantiate datapath components and
connections
Digital Design
Copyright © 2006
Frank Vahid
32
32
a
Datapath
Bus interface
D
30
RTL Example: Bus Interface
Inputs: rd (bit); Q (32 bits); A, Faddr (4 bits)
Outputs: D (32 bits)
Local register: Q1 (32 bits)
rd’
Inputs: rd, A_eq_Faddr
((A =(bit)
Faddr)
Outputs: Q1_ld, D_enand
(bit)rd)’
‘
rdSendData
rd WaitMyAddress
(A = Faddr)
D = Q1
and(A_eq_Faddr
rd
D = “Z”
and rd)‘
Q1 = Q
SendData
WaitMyAddress
a
D_en = 0
Q1_ld = 1
A_eq_Faddr
and rd
A
rd
4
Q
4
32
Q1_ld
rd
ld
= (4-bit)
A_eq_Faddr
D_en = 1
Q1_ld = 0
D_en
Bus interface
• Step 3: Connect datapath to controller
• Step 4: Derive controller’s FSM
Digital Design
Copyright © 2006
Frank Vahid
Faddr
Q1
32
32
Datapath
D
31
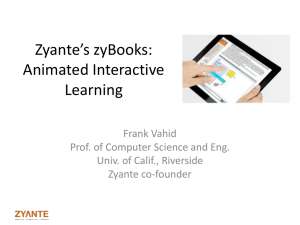
RTL Example: Video Compression – Sum of Absolute
Only difference: ball moving
Differences
Frame 1
Frame 2
Frame 1
Frame 2
Digitized
Digitized
Digitized
Difference of
frame 1
frame 2
frame 1
2 from 1
1 Mbyte
1 Mbyte
1 Mbyte
0.01 Mbyte
(a)
(b)
• Video is a series of frames (e.g., 30 per second)
• Most frames similar to previous frame
a
Just send
difference
– Compression idea: just send difference from previous frame
Digital Design
Copyright © 2006
Frank Vahid
32
RTL Example: Video Compression – Sum of Absolute
Differences
compare
Frame 1
Frame 2
Each is a pixel, assume
represented as 1 byte
(actually, a color picture
might have 3 bytes per
pixel, for intensity of
red, green, and blue
components of pixel)
• Need to quickly determine whether two frames are similar
enough to just send difference for second frame
– Compare corresponding 16x16 “blocks”
• Treat 16x16 block as 256-byte array
– Compute the absolute value of the difference of each array item
– Sum those differences – if above a threshold, send complete frame
for second frame; if below, can use difference method (using
another technique, not described)
Digital Design
Copyright © 2006
Frank Vahid
33
RTL Example: Video Compression – Sum of Absolute
Differences
256-byte array
A
256-byte array
B
SAD
sad
integer
go
!(i<256)
• Want fast sum-of-absolute-differences (SAD) component
– When go=1, sums the differences of element pairs in arrays A and
B, outputs that sum
Digital Design
Copyright © 2006
Frank Vahid
34
RTL Example: Video Compression – Sum of Absolute
Differences
SAD
A
sad
B
Inputs: A, B (256 byte memory); go (bit)
Outputs: sad (32 bits)
Local registers: sum, sad_reg (32 bits); i (9 bits)
go
•
•
•
•
S0: wait for go
S1: initialize sum and index
S2: check if done (i>=256)
S3: add difference to sum,
increment index
• S4: done, write to output
sad_reg
Digital Design
Copyright © 2006
Frank Vahid
S0
go
S1
(i<256)’
!(i<256)
!go
sum = 0
i=0
a
S2
i<256
sum=sum+abs(A[i]-B[i])
S3
i=i+1
S4
sad_reg = sum
35
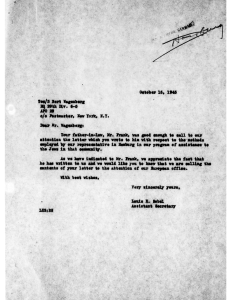
RTL Example: Video Compression – Sum of Absolute
Differences
AB_addr
Inputs: A, B (256 byte memory); go (bit)
Outputs: sad (32 bits)
Local registers: sum, sad_reg (32 bits); i (9 bits)
S0
i_lt_256
go
S1
(i<256)’
sum = 0
i=0
S2
<256
i_clr
8
sum_ld
sum_clr
Datapath
• Step 2: Create datapath
Digital Design
Copyright © 2006
Frank Vahid
8
–
i
a
i<256
!(i<256)
sum=sum+abs(A[i]-B[i])
sad_reg_ld
S3
i=i+1
!(i<256)
sad_reg=sum
S4(i_lt_256)
8
9
i_inc
!go
A_data B_data
sum
32
abs
8
32 32
sad_reg
+
32
sad
36
RTL Example: Video Compression – Sum of Absolute
Differences
go
AB_addr
AB_rd
i_lt_256
go’
S0
go
S1
?
i_clr
8
9
8
–
i
8
sum_ld
S2
i<256 i_lt_256
sum=sum+abs(A[i]-B[i])
S3
sum_ld=1; AB_rd=1
i=i+1 i_inc=1
S4
<256
i_inc
sum=0 sum_clr=1
i=0 i_clr=1
A_data B_data
sad_reg=sum
sad_reg_ld=1
(i_lt_256)
a
!(i<256)
!(i<256) (i_lt_256) Controller
sum_clr
!(i<256)
sum
32
abs
8
32 32
sad_reg_ld
sad_reg
+
32
sad
• Step 3: Connect to controller
• Step 4: Replace high-level state machine by FSM
Digital Design
Copyright © 2006
Frank Vahid
37
RTL Example: Video Compression – Sum of Absolute
Differences
• Comparing software and custom
circuit SAD
– Circuit: Two states (S2 & S3) for
each i, 256 i’s 512 clock cycles
– Software: Loop (for i = 1 to 256), but
for each i, must move memory to
local registers, subtract, compute
absolute value, add to sum,
increment i – say about 6 cycles per
!(i<256)
array item 256*6 = 1536 cycles
– Circuit is about 3 times (300%)
faster (i_lt_256)
!(i<256)
– Later, we’ll see how to build SAD
circuit that is even faster
Digital Design
Copyright © 2006
Frank Vahid
(i<256)’
S2
i<256
sum=sum+abs(A[i]-B[i])
S3
i=i+1
38
RTL Design Pitfalls and Good Practice
• Common pitfall: Assuming
register is update in the
state it’s written
– Final value of Q?
– Final state?
– Answers may surprise you
• Value of Q unknown
• Final state is C, not D
– Why?
• State A: R=99 and Q=R
happen simultaneously
• State B: R not updated with
R+1 until next clock cycle,
simultaneously with state
register being updated
Digital Design
Copyright © 2006
Frank Vahid
39
RTL Design Pitfalls and Good Practice
• Solutions
– Read register in
following state (Q=R)
– Insert extra state so that
conditions use updated
value
– Other solutions are
possible, depends on
the example
Digital Design
Copyright © 2006
Frank Vahid
40
RTL Design Pitfalls and Good Practice
• Common pitfall:
Reading outputs
– Outputs can only be
written
– Solution: Introduce
additional register,
which can be written
and read
Inputs: A, B (8 bits)
Outputs: P (8 bits)
S
T
S
T
P=A
P=P+B
R=A
P=A
P=R+B
(a)
Digital Design
Copyright © 2006
Frank Vahid
Inputs: A, B (8 bits)
Outputs: P (8 bits)
Local register: R (8 bits)
(b)
41
RTL Design Pitfalls and Good Practice
• Good practice: Register
all data outputs
B
R
B
R
– In fig (a), output P would
show spurious values as
addition computes
• Furthermore, longest
register-to-register path,
which determines clock
period, is not known until
that output is connected
to another component
– In fig (b), spurious outputs
reduced, and longest
register-to-register path is
clear
Digital Design
Copyright © 2006
Frank Vahid
+
+
P
(a)
Preg
P
(b)
42
Control vs. Data Dominated RTL Design
• Designs often categorized as control-dominated or datadominated
– Control-dominated design – Controller contains most of the
complexity
– Data-dominated design – Datapath contains most of the complexity
– General, descriptive terms – no hard rule that separates the two
types of designs
– Laser-based distance measurer – control dominated
– Bus interface, SAD circuit – mix of control and data
– Now let’s do a data dominated design
Digital Design
Copyright © 2006
Frank Vahid
43
Data Dominated RTL Design Example: FIR Filter
• Filter concept
– Suppose X is data from a
temperature sensor, and
particular input sequence is
180, 180, 181, 240, 180, 181
(one per clock cycle)
– That 240 is probably wrong!
• Could be electrical noise
– Filter should remove such
noise in its output Y
– Simple filter: Output average
of last N values
Y
X
12
digital filter
12
clk
• Small N: less filtering
• Large N: more filtering, but
less sharp output
Digital Design
Copyright © 2006
Frank Vahid
44
Data Dominated RTL Design Example: FIR Filter
• FIR filter
– “Finite Impulse Response”
– Simply a configurable weighted
sum of past input values
– y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
• Above known as “3 tap”
• Tens of taps more common
• Very general filter – User sets the
constants (c0, c1, c2) to define
specific filter
Y
X
12
digital filter
12
clk
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
– RTL design
• Step 1: Create high-level state
machine
– But there really is none! Data
dominated indeed.
• Go straight to step 2
Digital Design
Copyright © 2006
Frank Vahid
45
Data Dominated RTL Design Example: FIR Filter
• Step 2: Create datapath
– Begin by creating chain
of xt registers to hold past
values of X
Y
X
12
digital filter
12
clk
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
Suppose sequence is: 180, 181, 240
240
180
181
Digital Design
Copyright © 2006
Frank Vahid
180
181
180
a
46
Data Dominated RTL Design Example: FIR Filter
• Step 2: Create datapath
(cont.)
– Instantiate registers for
c0, c1, c2
– Instantiate multipliers to
compute c*x values
x(t)
c0
xt0
Y
X
12
12
digital filter
clk
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
3-tap FIR filter
x(t-1)
c1
xt1
x(t-2)
c2
xt2
X
a
clk
*
*
*
Y
Digital Design
Copyright © 2006
Frank Vahid
47
Data Dominated RTL Design Example: FIR Filter
• Step 2: Create datapath
(cont.)
Y
X
12
digital filter
12
clk
– Instantiate adders
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
3-tap FIR filter
x(t)
c0
xt0
x(t-1)
c1
xt1
x(t-2)
c2
xt2
X
clk
*
*
+
a
*
+
Y
Digital Design
Copyright © 2006
Frank Vahid
48
Data Dominated RTL Design Example: FIR Filter
• Step 2: Create datapath (cont.)
Y
X
12
– Add circuitry to allow loading of
particular c register
digital filter
12
clk
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
CL
3-tap FIR filter
e
Ca1
Ca0
3
2x4 2
1
0
C
x(t)
c0
xt0
x(t-1)
c1
xt1
x(t-2)
c2
xt2
a
X
clk
*
*
+
*
+
yreg
Y
Digital Design
Copyright © 2006
Frank Vahid
49
Data Dominated RTL Design Example: FIR Filter
• Step 3 & 4: Connect to controller, Create FSM
y(t) = c0*x(t) + c1*x(t-1) + c2*x(t-2)
– No controller needed
– Extreme data-dominated example
– (Example of an extreme control-dominated design – an FSM, with no
datapath)
• Comparing the FIR circuit to a software implementation
– Circuit
• Assume adder has 2-gate delay, multiplier has 20-gate delay
• Longest past goes through one multiplier and two adders
– 20 + 2 + 2 = 24-gate delay
• 100-tap filter, following design on previous slide, would have about a 34-gate
delay: 1 multiplier and 7 adders on longest path
– Software
• 100-tap filter: 100 multiplications, 100 additions. Say 2 instructions per
multiplication, 2 per addition. Say 10-gate delay per instruction.
• (100*2 + 100*2)*10 = 4000 gate delays
– Circuit is more than 100 times faster (10,000% faster). Wow.
Digital Design
Copyright © 2006
Frank Vahid
50
5.4
Determining Clock Frequency
• Designers of digital circuits
often want fastest
performance
clk
a
b
– Means want high clock
frequency
• Frequency limited by longest
register-to-register delay
– Known as critical path
– If clock is any faster, incorrect
data may be stored into register
– Longest path on right is 2 ns
2 ns
delay
+
c
• Ignoring wire delays, and
register setup and hold times,
for simplicity
Digital Design
Copyright © 2006
Frank Vahid
51
Critical Path
• Example shows four paths
2 ns
delay
b
+
*
7 ns
– 1 / 7 ns = 142 MHz
Max
c
5 ns
delay
7 ns
7 ns
7 ns
• Longest path is thus 7 ns
• Fastest frequency
a
5 ns
a to c through +: 2 ns
a to d through + and *: 7 ns
b to d through + and *: 7 ns
b to d through *: 5 ns
2 ns
–
–
–
–
d
(2,7,7,5)
= 7 ns
Digital Design
Copyright © 2006
Frank Vahid
52
Critical Path Considering Wire Delays
• Real wires have delay too
– Must include in critical path
• Example shows two paths
– 1980s/1990s: Wire delays were tiny
compared to logic delays
– But wire delays not shrinking as fast as
logic delays
• Wire delays may even be greater than
logic delays!
• Must also consider register setup and
hold times, also add to path
• Then add some time to the computed
path, just to be safe
a
b
0.5 ns
0.5 ns
+
2 ns
0.5 ns
3 ns
• Trend
clk
3 ns
– Each is 0.5 + 2 + 0.5 = 3 ns
c 3 ns
– e.g., if path is 3 ns, say 4 ns instead
Digital Design
Copyright © 2006
Frank Vahid
53
A Circuit May Have Numerous Paths
• Paths can exist
– In the datapath
– In the controller
– Between the
controller and
datapath
– May be
hundreds or
thousands of
paths
• Timing analysis
tools that evaluate
all possible paths
automatically very
helpful
Digital Design
Copyright © 2006
Frank Vahid
s
Combinational logic
a
8
8
d
tot_ld
ld
tot
t ot_clr
c
clr
8
(c)
tot_lt_s
n1
8-bit
<
n0
8-bit
adder
8
tot_lt_s
Datapath
s1
clk
s0
(b)
(a)
State register
54
Behavioral Level Design: C to Gates
5.5
C code
!go
S0
go
S1
(i<256)’
sum = 0
i=0
S2
i<256
sum=sum+abs(A[i]-B[i])
S3
i=i+1
S4
sad_reg = sum
a
int SAD (byte A[256], byte B[256]) // not quite C syntax
{
uint sum; short uint I;
sum = 0;
i = 0;
while (i < 256) {
sum = sum + abs(A[i] – B[i]);
i = i + 1;
}
return sum;
}
• Earlier sum-of-absolute-differences example
– Started with high-level state machine
– C code is an even better starting point -- easier to understand
Digital Design
Copyright © 2006
Frank Vahid
55
Behavioral-Level Design: Start with C (or Similar
Language)
• Replace first step of RTL design method by two steps
– Capture in C, then convert C to high-level state machine
– How convert from C to high-level state machine?
Step 1A: Capture in C
a
Step 1B: Convert to high-level state machine
Digital Design
Copyright © 2006
Frank Vahid
56
Converting from C to High-Level State Machine
• Convert each C construct to
equivalent states and
transitions
• Assignment statement
– Becomes one state with
assignment
target=
expression
target = expression;
a
• If-then statement
– Becomes state with condition
check, transitioning to “then”
statements if condition true,
otherwise to ending state
• “then” statements would also
be converted to states
Digital Design
Copyright © 2006
Frank Vahid
!cond
if (cond) {
// then stmts
}
cond
a
(then stmts)
(end)
57
Converting from C to High-Level State Machine
• If-then-else
– Becomes state with condition
check, transitioning to “then”
statements if condition true, or
to “else” statements if condition
false
!cond
if (cond) {
// then stmts
}
else {
// else stmts
}
cond
(then stmts) (else stmts)
a
(end)
• While loop statement
– Becomes state with condition
check, transitioning to while
loop’s statements if true, then
transitioning back to condition
check
Digital Design
Copyright © 2006
Frank Vahid
!cond
while (cond) {
// while stmts
}
cond
(while stmts)
a
(end)
58
Simple Example of Converting from C to HighLevel State Machine
Inputs: uint X, Y
Outputs: uint Max
!(X>Y)
!(X>Y)
X>Y
X>Y
if (X > Y) {
Max = X;
(then stmts)
(else stmts)
Max=X
Max=Y
}
else {
Max = Y;
(end)
(end)
}
a
a
(a)
(b)
(c)
• Simple example: Computing the maximum of two numbers
– Convert if-then-else statement to states (b)
– Then convert assignment statements to states (c)
Digital Design
Copyright © 2006
Frank Vahid
59
Example: Converting Sum-of-Absolute-Differences C
code to High-Level State Machine
• Convert each construct to
states
– Simplify when possible,
e.g., merge states
• From high-level state
machine, follow RTL design
method to create circuit
• Thus, can convert C to
gates using straightforward
automatable process
– Not all C constructs can be
efficiently converted
– Use C subset if intended
for circuit
– Can use languages other
than C, of course
Inputs: byte A[256, B[256]
bit go;
Output: int sad
main()
{
uint sum; short uint I;
while (1) {
!(!go)
!go
!go
sad = sum;
!go
(d)
(c)
(b)
while (i < 256) {
sum = sum + abs(A[i] - B[i]);
i = i + 1;
}
go
sum=0
i=0
i=0
sum = 0;
i = 0;
}
!go
sum=0
while (!go);
}
go
go
!go
go
a
(a)
!go
sum=0
i=0
go
sum=0
i=0
sum=0
i=0
!(i<256)
i<256
!(i<256)
i<256
sum=sum
+ abs
i=i+1
!(i<256)
i<256
sum=sum
+ abs
i=i+1
while stmts
sad =
sum
(g)
Digital Design
Copyright © 2006
Frank Vahid
(e)
sad =
sum
(f)
60
4.10
Register Files
• MxN register file
component provides
er C C
efficient access to M N- er
t
s
ompu
t
?
bit-wide registers
32
8
d0d0
4 162 4
cthe car
om ompu
– If we have many
al
com
rt the car's
r
d1
registers but only need al
r
F
4 a0
e
tn n
c
r
i0
access one or two at a F e
c
i1
time, a register file is
i3-i0
a1
d2
more efficient
– Ex: Above-mirror display
(earlier example), but this
d3
d15
e
time having 16 32-bit
e
load
registers
load
• Too many wires, and
big mux is too slow
Digital Design
Copyright © 2006
Frank Vahid
a
load
reg0
load
reg0
too much
fanout
load
reg1
huge mux
T
32
8
A
8
load reg2
I
32
8
load reg3
load reg15
o th
or mi
dis
T
mi
T
r
rorod
32-bit
8-bit r
16x41×1 r
o
i1
ve
a
o
y
a ve
d d y - DD
8
i0 i0
i2
congestion
M
32
8
i15i3 s1 s0
s3-s0
x
y
61
Register File
• Instead, want component that has one data input and one data output,
and allows us to specify which internal register to write and which to read
32
4
32
W_data
R_data
W_addr
R_addr
W_en
16×32
register file
a
4
R_en
a
Digital Design
Copyright © 2006
Frank Vahid
62
Register File Timing Diagram
• Can write one
register and read
one register each
clock cycle
– May be same
register
32
32
W_data
R_data
W_addr
R_addr
2
2
W_en
R_en
4x32
register file
Digital Design
Copyright © 2006
Frank Vahid
63
5.6
• Register-transfer level
design instantiates datapath
components to create
datapath, controlled by a
controller
– A few more components are
often used outside the
controller and datapath
M words
Memory Components
• MxN memory
– M words, N bits wide each
• Several varieties of memory,
which we now introduce
Digital Design
Copyright © 2006
Frank Vahid
N-bits
wide each
M×N memory
64
Random Access Memory (RAM)
• RAM – Readable and writable memory
– “Random access memory”
• Strange name – Created several decades ago to
contrast with sequentially-accessed storage like
tape drives
– Logically same as register file – Memory with
address inputs, data inputs/outputs, and control
32
4
32
W_data
R_data
W_addr
R_addr
W_en
16×32
register file
4
R_en
Register file from Chpt. 4
• RAM usually just one port; register file usually two
or more
– RAM vs. register file
• RAM typically larger than roughly 512 or 1024
words
• RAM typically stores bits using a bit storage
approach that is more efficient than a flip flop
• RAM typically implemented on a chip in a square
rather than rectangular shape – keeps longest
wires (hence delay) short
Digital Design
Copyright © 2006
Frank Vahid
32
data
10
addr
rw
1024× 32
RAM
en
RAM block symbol
65
RAM Internal Structure
32
10
data
rw
wdata(N-1) wdata(N-2) wdata0
Let A = log2M
addr
1024x32
RAM
en
d0
addr0
addr1
addr(A-1)
addr
clk
en
rw
word
enable
a0
a1 AxM
d1
decoder
a(A-1)
e
bit storage
block
(aka “cell”)
word
data cell
word word
enable enable
rw data
d(M-1)
to all cells
rdata(N-1) rdata(N-2) rdata0
RAM cell
• Similar internal structure as register file
Digital Design
Copyright © 2006
Frank Vahid
– Decoder enables appropriate word based on address
inputs
– rw controls whether cell is written or read
– Let’s see what’s inside each RAM cell
66
Static RAM (SRAM)
SRAM cell
32
10
addr
rw
data’
data
data
cell
d
1024x32
RAM
d’
en
a
0
word
enable
• “Static” RAM cell
SRAM cell
– 6 transistors (recall inverter is 2 transistors)
– Writing this cell
data’
0
data
1
d
• word enable input comes from decoder
• When 0, value d loops around inverters
a
1
0
– That loop is where a bit stays stored
• When 1, the data bit value enters the loop
– data is the bit to be stored in this cell
– data’ enters on other side
– Example shows a “1” being written into cell
data
1
Digital Design
Copyright © 2006
Frank Vahid
1
word
enable
word
enable
d
0
data’
cell
d’
0
a
67
Static RAM (SRAM)
32
10
data
addr
rw
1024x32
RAM
en
• “Static” RAM cell
SRAM cell
• Somewhat trickier
• When rw set to read, the RAM logic sets
both data and data’ to 1
• The stored bit d will pull either the left line or
the right bit down slightly below 1
• “Sense amplifiers” detect which side is
slightly pulled down
data’
1
data
1
– Reading this cell
d
1
0
a
word
enable
1
1
<1
To sense amplifiers
– The electrical description of SRAM is really
beyond our scope – just general idea here,
mainly to contrast with DRAM...
Digital Design
Copyright © 2006
Frank Vahid
68
Dynamic RAM (DRAM)
32
10
data
addr
rw
1024x32
RAM
en
DRAM cell
• “Dynamic” RAM cell
– 1 transistor (rather than 6)
– Relies on large capacitor to store bit
• Write: Transistor conducts, data voltage
level gets stored on top plate of capacitor
• Read: Just look at value of d
• Problem: Capacitor discharges over time
– Must “refresh” regularly, by reading d and
then writing it right back
data
cell
word
enable
capacitor
slowly
discharging
(a)
data
enable
d
Digital Design
Copyright © 2006
Frank Vahid
d
discharges
(b)
69
Comparing Memory Types
• Register file
– Fastest
– But biggest size
• SRAM
– Fast
– More compact than register file
• DRAM
MxN Memory
implemented as a:
register
file
SRAM
DRAM
– Slowest
• And refreshing takes time
– But very compact
• Use register file for small items,
SRAM for large items, and DRAM
for huge items
Size comparison for same
number of bits (not to scale)
– Note: DRAM’s big capacitor requires
a special chip design process, so
DRAM is often a separate chip
Digital Design
Copyright © 2006
Frank Vahid
70
Reading and Writing a RAM
clk
2
1
addr
9
13
data
500
999
rw
3
9
Z
addr
500
1 means write
en
•
clk
data
rw
valid setup
time
valid
hold
time
setup
time
500
access
time
RAM[9]
RAM[13]
now equals 500 now equals 999
Writing
Z
(b)
– Put address on addr lines, data on data lines, set rw=1, en=1
•
Reading
– Set addr and en lines, but put nothing (Z) on data lines, set rw=0
– Data will appear on data lines
•
Don’t forget to obey setup and hold times
– In short – keep inputs stable before and after a clock edge
Digital Design
Copyright © 2006
Frank Vahid
71
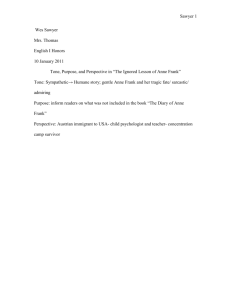
RAM Example: Digital Sound Recorder
wire
microphone
en
rw
addr
data
4096× 16
RAM
16
analog-todigital
converter
ad_buf
ad_ld
12
Ra Rrw Ren
processor
digital-toanalog
converter
wire
da_ld
• Behavior
speaker
– Record: Digitize sound, store as series of 4096 12-bit digital values in RAM
• We’ll use a 4096x16 RAM (12-bit wide RAM not common)
– Play back later
– Common behavior in telephone answering machine, toys, voice recorders
• To record, processor should read a-to-d, store read values into
successive RAM words
– To play, processor should read successive RAM words and enable d-to-a
Digital Design
Copyright © 2006
Frank Vahid
72
RAM Example: Digital Sound Recorder
4096x16
RAM
• RTL design of processor
– Create high-level state
machine
– Begin with the record behavior
– Keep local register a
• Stores current address,
ranges from 0 to 4095 (thus
need 12 bits)
– Create state machine that
counts from 0 to 4095 using a
• For each a
– Read analog-to-digital conv.
» ad_ld=1, ad_buf=1
– Write to RAM at address a
» Ra=a, Rrw=1, Ren=1
Digital Design
Copyright © 2006
Frank Vahid
16
analog-todigital
converter
ad_buf
ad_ld
12
digital-toanalog
converter
Ra Rw Ren
processor
da_ld
Record behavior
Local register: a (12 bits)
a<4095
S
T
a=0
ad_ld=1
ad_buf=1
Ra=a
Rrw=1
Ren=1
a
U
a=a+1
a=4095
73
RAM Example: Digital Sound Recorder
– Now create play behavior
– Use local register a again,
create state machine that
counts from 0 to 4095 again
• For each a
– Read RAM
– Write to digital-to-analog conv.
• Note: Must write d-to-a one
cycle after reading RAM, when
the read data is available on
the data bus
– The record and play state
machines would be parts of a
larger state machine controlled
by signals that determine when
to record or play
Digital Design
Copyright © 2006
Frank Vahid
4096x16
RAM
data bus
16
analog-todigital
converter
ad_buf
ad_ld
12
digital-toanalog
converter
Ra Rw Ren
processor
da_ld
Play behavior
Local register: a (12 bits)
a<4095
V
W
a=0
ad_buf=0
Ra=a
Rrw=0
Ren=1
a
X
da_ld=1
a=a+1
a=4095
74
Read-Only Memory – ROM
• Memory that can only be read from, not
written to
32
data
10
addr
– Data lines are output only
– No need for rw input
rw
1024× 32
RAM
en
• Advantages over RAM
– Compact: May be smaller
– Nonvolatile: Saves bits even if power supply
is turned off
– Speed: May be faster (especially than
DRAM)
– Low power: Doesn’t need power supply to
save bits, so can extend battery life
• Choose ROM over RAM if stored data won’t
change (or won’t change often)
RAM block symbol
32
data
10
addr
1024x32
ROM
en
ROM block symbol
– For example, a table of Celsius to Fahrenheit
conversions in a digital thermometer
Digital Design
Copyright © 2006
Frank Vahid
75
Read-Only Memory – ROM
32
data
10
addr
1024x32
ROM
Let A = log2M
en
d0
ROM block symbol
addr0
addr1
addr(A-1)
addr
a0
a1 AxM
d1
decoder
a(A-1)
e
clk
word
enable
bit storage
block
(aka “cell”)
word
data
word word
enable enable
data
d(M-1)
en
rdata(N-1) rdata(N-2) rdata0
ROM cell
• Internal logical structure similar to RAM, without the data
input lines
Digital Design
Copyright © 2006
Frank Vahid
76
ROM Types
• If a ROM can only be read, how
are the stored bits stored in the
first place?
– Storing bits in a ROM known as
programming
– Several methods
• Mask-programmed ROM
– Bits are hardwired as 0s or 1s
during chip manufacturing
• 2-bit word on right stores “10”
• word enable (from decoder) simply
passes the hardwired value
through transistor
1
data line
cell
0
data line
cell
word
enable
– Notice how compact, and fast, this
memory would be
Digital Design
Copyright © 2006
Frank Vahid
77
ROM Types
• Fuse-Based Programmable
ROM
– Each cell has a fuse
– A special device, known as a
programmer, blows certain fuses
(using higher-than-normal voltage)
• Those cells will be read as 0s
(involving some special electronics)
• Cells with unblown fuses will be read
as 1s
• 2-bit word on right stores “10”
– Also known as One-Time
Programmable (OTP) ROM
Digital Design
Copyright © 2006
Frank Vahid
1
data line
cell
1
data line
cell
a
word
enable
fuse
blown fuse
78
ROM Types
• Erasable Programmable ROM
(EPROM)
• Electrons become trapped in the gate
• Only done for cells that should store 0
• Other cells (without electrons trapped in
gate) will be 1
– 2-bit word on right stores “10”
• Details beyond our scope – just general
idea is necessary here
floating-gate
transistor
– Uses “floating-gate transistor” in each cell
– Special programmer device uses higherthan-normal voltage to cause electrons to
tunnel into the gate
o
tr
word
enable
ting
ar
e
ta t
g
data line
data line
cell
cell
1
0
eÐeÐ
trapped electrons
– To erase, shine ultraviolet light onto chip
• Gives trapped electrons energy to escape
• Requires chip package to have window
Digital Design
Copyright © 2006
Frank Vahid
79
ROM Types
• Electronically-Erasable Programmable ROM
(EEPROM)
– Similar to EPROM
• Uses floating-gate transistor, electronic programming to
trap electrons in certain cells
– But erasing done electronically, not using UV light
– Erasing done one word at a time
• Flash memory
– Like EEPROM, but all words (or large blocks of
words) can be erased simultaneously
– Become common relatively recently (late 1990s)
• Both types are in-system programmable
– Can be programmed with new stored bits while in the
system in which the ROM operates
• Requires bi-directional data lines, and write control input
• Also need busy output to indicate that erasing is in
progress – erasing takes some time
Digital Design
Copyright © 2006
Frank Vahid
32
data
10
addr
en
1024x32
EEPROM
write
busy
80
ROM Example: Digital Telephone Answering Machine
Using a Flash Memory
•
Want to record the outgoing
announcement
– When rec=1, record digitized
sound in locations 0 to 4095
– When play=1, play those
stored sounds to digital-toanalog converter
•
What type of memory?
– Should store without power
supply – ROM, not RAM
– Should be in-system
programmable – EEPROM
or Flash, not EPROM, OTP
ROM, or mask-programmed
ROM
– Will always erase entire
memory when
reprogramming – Flash
better than EEPROM
Digital Design
Copyright © 2006
Frank Vahid
4096x16 Flash
“We’re not home.”
busy
analog-todigital
converter
16
ad_buf
ad_ld
12
Ra Rrw Ren er
processor
record
microphone
bu
digital-toanalog
converter
da_ld
rec
play
speaker
81
ROM Example: Digital Telephone Answering Machine
Using a Flash Memory
• High-level state machine
– Once rec=1, begin
erasing flash by setting
er=1
– Wait for flash to finish
erasing by waiting for
bu=0
– Execute loop that sets
local register a from 0 to
4095, reading analog-todigital converter and
writing to flash for each a
4096x16 Flash
analog-todigital
converter
ad_buf
12
ad_ld
Ra Rrw Ren er
processor
bu
digital-toanalog
converter
da_ld
rec
record
play
microphone
S
a=0
er=1
rec
Digital Design
Copyright © 2006
Frank Vahid
16
speaker
Local register: a (13 bits)
bu
a<4096
T bu’ U
er=0
ad_ld=1
ad_buf=1
Ra=a
Rrw=1
Ren=1
a=a+1
a
V
a=4096
82
Blurring of Distinction Between ROM and RAM
• We said that
– RAM is readable and writable
– ROM is read-only
ROM
Flash
EEPROM
RAM
a
NVRAM
• But some ROMs act almost like RAMs
– EEPROM and Flash are in-system programmable
• Essentially means that writes are slow
– Also, number of writes may be limited (perhaps a few million times)
• And, some RAMs act almost like ROMs
– Non-volatile RAMs: Can save their data without the power supply
• One type: Built-in battery, may work for up to 10 years
• Another type: Includes ROM backup for RAM – controller writes RAM contents to
ROM before turning off
• New memory technologies evolving that merge RAM and ROM benefits
– e.g., MRAM
• Bottom line
– Lot of choices available to designer, must find best fit with design goals
Digital Design
Copyright © 2006
Frank Vahid
83
Hierarchy and Abstraction
• Abstraction
– Hierarchy often involves not just grouping
items into a new item, but also associating
higher-level behavior with the new item,
known as abstraction
• e.g., an 8-bit adder has an understandable
high-level behavior – it adds two 8-bit binary
numbers
– Frees designer from having to remember,
or even from having to understand, the
lower-level details
Digital Design
Copyright © 2006
Frank Vahid
a7.. a0
b7.. b0
8-bit adder
co
ci
s7.. s0
84
Hierarchy and Composing Larger Components
from Smaller Versions
•
A common task is to compose smaller components
into a larger one
– Gates: Suppose you have plenty of 3-input AND gates,
but need a 9-input AND gate
a
• Can simple compose the 9-input gate from several 3-input
gates
– Muxes: Suppose you have 4x1 and 2x1 muxes, but
need an 8x1 mux
• s2 selects either top or bottom 4x1
• s1s0 select particular 4x1 input
• Implements 8x1 mux – 8 data inputs, 3 selects, one output
P
ro
vin
c
e1
Digital Design
Copyright © 2006
Frank Vahid
85
Hierarchy and Composing Larger Components
from Smaller Versions
• Composing memory very common
• Making memory words wider
– Easy – just place memories side-by-side until desired width obtained
– Share address/control lines, concatenate data lines
– Example: Compose 1024x8 ROMs into 1024x32 ROM
10
addr
en
addr
1024x8
ROM
en
data
addr
1024x8
ROM
en
data
addr
1024x8
ROM
en
data
addr
1024x8
ROM
en
data
8
8
8
8
data(31..0)
10
1024x32
ROM
data
Digital Design
Copyright © 2006
Frank Vahid
32
86
Hierarchy and Composing Larger Components
from Smaller Versions
•
11
a9..a0
Creating memory with more words
– Put memories on top of one another until the
number of desired words is achieved
– Use decoder to select among the memories
• Can use highest order address input(s) as
decoder input
• Although actually, any address line could be
used
addr
a
a10 just chooses
which memory
to access
Digital Design
Copyright © 2006
Frank Vahid
0 1 1 1 1 1 1 1 1 1 0
0 1 1 1 1 1 1 1 1 1 1
1 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 1
1 0 0 0 0 0 0 0 0 1 0
1 1 1 1 1 1 1 1 1 1 0
1 1 1 1 1 1 1 1 1 1 1
1x2 d0
dcd
i0
e d1
1024x8
ROM
en
data
8
en
– Example: Compose 1024x8 memories into
2048x8 memory
a10a9a8
a0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0 0 1 0
a10
addr
addr
1024x8
ROM
11
2048x8
ROM
en
data
8
data
addr
8
1024x8
ROM
en data
a
addr
1024x8
ROM
en data
To create memory with more
words and wider words, can first
compose to enough words, then
widen.
87
Chapter Summary
– Modern digital design involves creating processor-level components
– Four-step RTL method can be used
• 1. High-level state machine 2. Create datapath 3. Connect datapath
to controller 4. Derive controller FSM
– Several example
• Control dominated, data dominated, and mix
– Determining fastest clock frequency
• By finding critical path
– Behavioral-level design – C to gates
• By using method to convert C (subset) to high-level state machine
– Additional RTL components
• Memory: RAM, ROM
• Queues
– Hierarchy: A key concept used throughout Chapters 2-5
Digital Design
Copyright © 2006
Frank Vahid
88