High Speed Digital Network
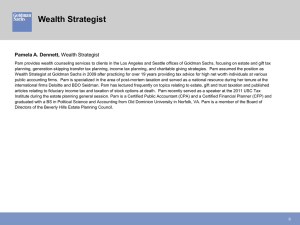
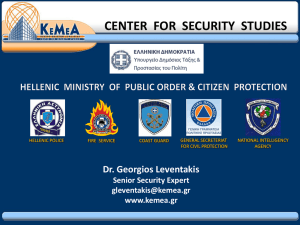
advertisement

Digital Communication Theory
and Systems
Y. C. Jenq
Department of Electrical & Computer Engineering
Portland State University
P. O. Box 751
Portland, OR 97207
jenq@ece.pdx.edu
@Y. C. Jenq
1
Outlines
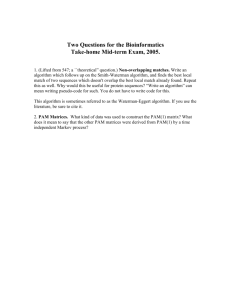
Pulse Amplitude Modulation (PAM)
–
–
–
Probability of Error under AWGN
Optimal Receiver & Matched Filter
Geometric Representation
Multi-Dimensional Orthogonal Signals
–
–
–
PSK Systems
QAM Systems
FSK Systems
@Y. C. Jenq
2
Outlines-continued
Optimal Receiver for M-ary Orthogonal Signals
with Additive White Gaussian Noise
–
–
–
PAM Systems
PSK & QAM Systems
FSK Systems
Probability of Error for Optimal Detector with
Additive White Gaussian Noise
–
–
–
PAM Systems
PSK & QAM Systems
FSK Systems
@Y. C. Jenq
3
Outlines-continued
Digital Transmission through Band-limited
Additive White Gaussian Noise Channels
–
–
Base-band Channels & Intersymbol Interference (ISI)
Pass-Band Channels
Power Spectrum of Digitally Modulated Signals
Signal Design for Band-limited Channels
Probability of Error with ISI and AWGN
System Design and Channel Equalization
Multi-Carrier Modulation and OFDM
@Y. C. Jenq
4
PAM Base-band Systems
Binary PAM System (binary antipodal signaling)
1 - represented by a pulse with amplitude A
0 - represented by a pulse with amplitude -A
s1(t)
A
s2(t)
Tb
Tb
Tb : bit interval (second)
t
Rb = 1/Tb : bit rate (bit/sec)
t
-A
@Y. C. Jenq
5
Probability of Error for Binary PAM
Systems with AWGN
A simple Receiver – Sample & Threshold Detector
yes
Gaussian Noise
R
r(t) = sm(t) + n(t)
Am = 1
> 0?
no
Am = -1
Probability of Error
Pe = Pr{Am=1} Pr{R<0} + Pr{Am=-1} Pr{R>0}
Pe = Q (Am /sn) = Q ([S/R]1/2)
@Y. C. Jenq
6
Probability of Error for Binary PAM
Systems with AWGN
The Optimal Receiver – The Matched Filter
s(t)
y(t)
h(t) = s(T-t)
T
y(t) =
t
T
t
0 s(t)h(t-t)dt
t
t
T
2T
t
= 0 s(t)s(T-t+t)dt
y(T) = 0 s(t)s(t)dt
T
@Y. C. Jenq
7
The Matched Filter
The received signal: r(t) = s(t) + n(t)
Matched filter output: y(t)
y(t) = 0 r(t)h(t-t)dt = 0 [s(t)+n(t)]h(t-t)dt
t
t
Sampled at t=T
y(T) = 0 s(t)h(T-t)dt +
= ys(T) + yn(T)
T
T
0 n(t)h(T-t)dt
Output Signal to Noise Ratio: (S/N)o
(S/N)o = ys2 (T)/ E{yn2 (T)}
@Y. C. Jenq
8
The Matched Filter
If the noise is White with the power spectral density
No/2 The h(t) that maximizes the output
signal to noise ratio, (S/N)o , is the Matched Filter:
h(t) = s(T-t)
And the maximum output signal to noise ratio is
(S/N)o =
T
(2/No)0 s(t)s(t)dt
= 2Es/No = Es/(No /2)
= Signal Energy/Noise Power Spectral Density
@Y. C. Jenq
9
Probability of Error for Binary PAM Systems
with AWGN and Matched Filter Receiver
The received signal: r(t) = s(t) + n(t) = Amg(t) + n(t)
the Matched Filter output: y(t)
y(t)
= 0 r(t)g(T-t+t)dt
t
t
= 0 Amg(t)g(T-t+t)dt + 0 n(t)g(T-t+t)dt
t
Sampled at t=T
y(T)
= 0 Amg(t)g(t)dt + 0 n(t)g(t)dt
= ys(T) + yn(T)
= AmEg+ (Gaussian Random Variable with s2= EgNo/2)
T
T
Probability of Error: Pe = Q ([Am2Eg /(No/2)]1/2)
Pe = Q([ Signal Energy/Noise Power Spectral Density]1/2)
@Y. C. Jenq
10
Probability of Error for Binary PAM Systems
with Integrate & Dump Receiver
The received signal: r(t) = s(t) + n(t) = Amg(t) + n(t)
the Intergrated & Dump output: y(t)
y(t)
= 0 r(t)dt
t
t
= 0 Amg(t)dt + 0 n(t)dt
t
Sampled at t=T
y(T)
= 0 Amg(t)dt + 0 n(t)dt
= ys(T) + yn(T)
T
= Am 0 g(t)dt + (Gaussian Random Variable with s2= TNo/2)
T
T
Probability of Error: Pe = Q (Am 0 g(t)dt /(No/2)1/2)
T
Pe >= Q([ Signal Energy/Noise Power Spectral Density]1/2)
@Y. C. Jenq
11
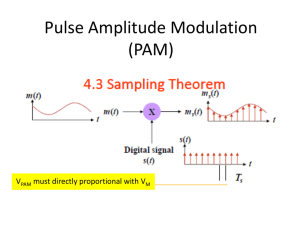
M-ray PAM Base-band Systems
M-ary PAM System : k bits per Symbol
s1(t)
3A
s2(t)
T
t
s3(t)
A
T
t
s4(t)
T
-A
T
t
t
-3A
T : symbol interval (second),
T = k Tb (second)
R = 1/T : symbol rate (symbol/sec), Rb = k R (bit/sec)
@Y. C. Jenq
12
M-ary PAM Signals
sm(t) = Am gT(t)
m = 1, 2, 3, .. , M,
gT(t)
1
t
T
Em= 0
0tT
Energy of the signal
T
s2
m(t)
dt =
A2
T
m 0
@Y. C. Jenq
g2T(t) dt = A2m Eg
13
Geometric Representation of Signals
• Orthogonal Functions
• Ortho-normal Functions
• Gram-Schmidt Orthogonalization Procedure
• Basis Functions
1(t) = s1(t)/(E1
E1 = - s12(t)dt
)1/2,
c21 = - s2(t)1(t)dt,
d2(t) = s2(t) - c21 1(t)
2(t) = d2(t)/(E2
E2 = - d22(t)dt
)1/2 ,
sm(t) = Sn=1,N sm,n n(t),
sm,n= - sm(t)n(t)dt,
@Y. C. Jenq
14
Geometric Representation of PAM Signals
For M-ary PAM signals
sm(t) = Am gT(t),
Let
Then
m = 1, 2, 3, .. , M,
(t) = (1/Eg)1/2 gT(t)
sm(t) = sm(t),
0tT
0tT
m= 1, 2, …, M
where sm = Am (Eg)1/2,
(PAM signals are one-dimensional signals)
Signal Energy:Em= sm2 = Eg Am2 ,
m= 1, 2, …, M
Euclidean Distance: dmn = (|sm - sn|2 )1/2 = (Eg (Am – An)2 )1/2,
d
0
@Y. C. Jenq
15
Two-Dimensional Band-pass Signals:
Carrier Phase Modulation
Phase Modulation signals:
um(t) = gT(t) cos(2p fct + 2p m/M),
m = 1, 2, 3, .. , M,
0tT
1(t) = (2/Eg)1/2 gT(t) cos(2p fct ),
0tT
and 2(t) = -(2/Eg)1/2 gT(t) sin(2p fct ),
0tT
Let
Then
um(t) = Es1/2cos(2p m/M)1(t) + Es1/2sin(2p m/M)2(t)
Or
um = [Es1/2cos(2p m/M), Es1/2sin(2p m/M)]
@Y. C. Jenq
16
Two-Dimensional Band-pass Signals:
Carrier Phase Modulation
PSK (Phase-Shift Keying) signals:
um(t) = (2Es/T)1/2cos(2p fct + 2p m/M),
m = 1, 2, 3, .. , M,
0tT
1(t) = (2/T)1/2 cos(2p fct ),
0tT
and 2(t) = -(2/T)1/2 sin(2p fct ),
0tT
Let
Then
um(t) = Es1/2cos(2p m/M)1(t) + Es1/2sin(2p m/M)2(t)
Or
um = [Es1/2cos(2p m/M), Es1/2sin(2p m/M)]
@Y. C. Jenq
17
PSK Signal Point Constellations
M=4
M=2
01
Es1/2
1
Es1/2
00
0
11
10
Gray Encoding
011
001
Es1/2
010
110
M=8
M=8
Es1/2
000
100
111
110
@Y. C. Jenq
18
PSK Signal Point Constellations
Minimum Distances
dmin = (2Es)1/2
dmn = 2Es1/2
M=2
Es1/2
1
01
Es1/2
00 M=4
0
11
011
001
Es1/2
010
110
10
dmin = [(2-21/2)Es]1/2
M=8
Es1/2
000
M=8
100
111
110
@Y. C. Jenq
19
Two-Dimensional Band-pass Signals:
Quadrature Amplitude Modulation
QAM (Quadrature Amplitude Modulation) signals:
um(t) = AmcgT(t)cos(2p fct)+AmsgT(t)sin(2p fct), m = 1, 2, 3, .. , M,
0tT
1(t) = (2/Eg)1/2gT(t)cos(2p fct ),
0tT
and 2(t) = (2/Eg)1/2gT(t) sin(2p fct ),
0tT
Let
Then
um(t) = Amc(Eg/2)1/21(t) + Ams(Eg/2)1/22(t)
Or
um = [Amc(Eg/2)1/2, Ams(Eg/2)1/2]
@Y. C. Jenq
20
QAM Signal Point Constellations
[Eg(Amc2+Ams2)/2]1/2
M=2
M=4
@Y. C. Jenq
21
QAM-PSK Signal Constellations
@Y. C. Jenq
22
Multi-Dimensional Waveforms
For N-dimensional Waveforms
sm(t) = S
n=1,N sm,n n(t),
sm,n= - um(t)n(t)dt,
sm=( sm,1, sm,2, sm3, ……. ,sm,N )
For orthogonal signals
sm(t) = Es1/2 m(t),
m = 1, 2, 3, .. , M,
0tT
sm=( 0, 0, 0, … , Es1/2, …. ,0 )
M-th position
@Y. C. Jenq
23
Frequency-Shift Keying (FSK)
FSK (Frequency-Shift Keying) signals:
um(t) = (2Es/T)1/2cos(2p fct + 2p m f t),
m = 0, 2, 3, .. , M-1,
0tT
Define correlation coefficients gmn as
gmn= (1/Es) 0 um(t)un(t)dt,
T
= sin[2p(m-n)f T]/[2p(m-n)f T]
for fc >> (1/T)
Then gmn = 0 for m n if f is an integer multiple of (1/2T),
and the FSK signals form an orthogonal signal set with
m(t) = (2/T)1/2cos(2p fct + 2p m f t),
@Y. C. Jenq
m = 0, 2, 3, .. , M-1,
24
Optimal Receiver for M-ary Orthogonal
Signals with Additive White Gaussian Noise
1(t)
Received
Signal
r(t)
X
2(t)
X
T
r1
T
r2
0 ( )dt
0 ( )dt
To
Detector
N(t)
X
T
0 ( )dt
rN
Sampled at t = T
@Y. C. Jenq
25
Optimal Receiver for M-ary Orthogonal
Signals with Additive White Gaussian Noise
Transmitted
signal sm(t)
Receivbed signal
r(t) = sm(t)+ n(t)
+
noise n(t)
r(t) = sm(t) + n(t)
0 r(t)k(t)(t)dt
T
= 0 [sm(t) + n(t)]k(t)(t)dt
T
= 0 sm(t)k(t)dt + 0 n(t)k(t)dt
T
rk = smk + nk,
OR
T
k = 1, 2, 3, …,N
r = sm + n
@Y. C. Jenq
26
The Joint Conditional Probability
Density Functions: f(r|sm)
Given sm(t) is transmitted, we can express the received signal as
r(t)
= Sk=1,N sm,k k(t) + Sk=1,N nk k(t) + n’(t)
= Sk=1,N rk k(t) + n’(t)
where n’(t) = n(t) - Sk=1,N nmk k(t)
It can be shown that the correlation E[n’(t) rk] = 0 for all k.
Therefore n’(t) is irrelevant for the detection of sm(t)
It can also be shown that
E[nk] = 0
for all k, and E[nk nm] = (No/2)dkm
Hence { nk } are zero-mean independent Gaussian random
variables with a common variance = sn2 = No/2
@Y. C. Jenq
27
The Joint Conditional Probability
Density Functions: f(r|sm)
Since r = sm + n,
i.e., rk = smk + nk
k= 1, 2, …,N
Hence {rk, k= 1, 2, …,N} are independent Gaussian random
variables with E[rk] = smk, and
sr2 = sn2 = No/2
Therefore
f(r | sm) = 1/(p No)N/2 EXP[- Sk=1,N (rk -sm,k)2/No ]
m = 1, 2, …, M
Or
f(r | sm) = 1/(p No)N/2 EXP[- (|r -sm,|)2/No ]
m = 1, 2, …, M
@Y. C. Jenq
28
The Optimal (MAP) Detector
• MAP (Maximum A posterior Probability) Detector
The posterior probability that the signal sm was transmitted,
given that the signal received is r:
P(sm |r) = Pr{ signal sm was transmitted | r }
= f(r | sm)P(sm) / f(r),
m= 1, 2, 3,…. , M
where P(sm) is the priori probability
and
f(r) = Sm=1,M f(r | sm)P(sm) (total probability theorem)
@Y. C. Jenq
29
The Optimal (ML) Detector
• ML (Maximum Likelihood) Detector
The conditional PDF, f(r | sm), or any monotonic function of
it is called the likelihood function (i.e., the likelihood that r is
received if sm was transmitted).
If the priori probability is equally likely, i.e., P(sm) = 1/M ,
i.e., signals {sm, m = 1, 2, , …, M} are equi-probable, then
maximizing the likelihood function is equivalent to
maximizing the posterior probability. That is, the ML
detector is the same as the MAP detector
@Y. C. Jenq
30
Optimal Detectors Minimize
Probability of Error
Let Rm be the region in the N-dimensional space where we
decide that signal, sm, was transmitted when the vector
r = (r1, r2, r3, …,rN) is received, then the probability of error
P(e) = Sm=1,M P(sm)P(e|sm)
= Sm=1,M P(sm)[1- Rm f(r|sm)dr ]
= 1 - Sm=1,M Rm f(r|sm)P(sm) dr
= 1 - Sm=1,M RmP(sm |r)f(r) dr
(1)
For equi-probable transmitted signal set
P(e) = 1 – (1/M)Sm=1,M Rm f(r|sm)dr
(2)
MAP detector minimizes (1) & ML detector minimizes (2)
@Y. C. Jenq
31
The Optimal (MD) Detector with
Additive White Gaussian Noise
For the AWGN channel, let us use ln [f(r | sm)]as the
likelihood function, then
ln [f(r | sm)] = -(N/2)ln(p No) – (1/No)Sk=1,N (rk -sm,k)2
The maximum of ln [f(r | sm)] over sm is equivalent to finding
the signal sm that minimizes the Euclidean distance:
D(r, sm) = Sk=1,N (rk -sm,k)2
Therefore, for an AWGN channel and equi-probable
transmitted signal set, {sm}, MAP detector = ML detector =
MD (Minimum Distance) detector.
Example: Binary PAM System, s1=-s2= Eb, P(s1)=p.
@Y. C. Jenq
32
Optimal Receiver for M-ary Orthogonal
Signals with Additive White Gaussian Noise
1(t)
Received
Signal
r(t)
X
2(t)
X
T
r1
T
r2
0 ( )dt
0 ( )dt
To
Detector
N(t)
X
T
0 ( )dt
rN
Sampled at t = T
@Y. C. Jenq
33
Probability of Error forM-ary
Orthogonal Signals with AWGN
r = (Es+n1, n2 , n3 , n4 , ….. nM)
P(correct) = - P(n2<r1, n3<r1 , n4<r1 , ….. n4<r1 |r1 )f(r1)dr1
= - [1-Q( 2r12 /No)](M-1)f(r1)dr1
Therefore
PM = 1/(2p) - {1-[1-Q(x)](M-1)} e-(x-2Es/No)2 dx
@Y. C. Jenq
34
Symbol Error Rate &
Bit Error Rate
There are k bits in a symbol, and there are (2k-1) possible ways
the symbol could be in error. If PM is the symbol error rate,
then each possible way has a probability of PM/(2k-1) for
occurring. Therefore, the average number of bits in error given
that the symbol is in error is
Sn=1,k n(kn) PM/(2k-1) = k 2k-1 PM /(2k-1)
Let Pb be the bit error rate
Then k Pb = k 2k-1 PM /(2k-1)
and
Pb = 2k-1/(2k-1) PM PM/2 for large k
For Gray Coding
Pb = PM/k
@Y. C. Jenq
35
Symbol Error Rate &
Bit Error Rate
Let Pb be the bit error rate
Then
Pb = P{e|symbol in error} PM
= 2k-1/(2k-1) PM
PM/2 for large k
For Gray Coding
Pb = PM/k
@Y. C. Jenq
36
Bi-orthogonal & Simplex Signals
Bi-orthogonal Signals
Simplex Signals – not Orthogonal
but smaller energy
@Y. C. Jenq
37
Probability of Error for
Binary PAM Signals with AWGN
Binary PAM systems
sm(t) = Am gT(t),
Let
Then
0tT
m = 1, 2
(t) = (1/Eg)gT(t)
sm(t) = sm(t),
0tT
where sm = Am(Eg), A1 = 1, A2 = -1
Signal Energy:Em= sm2 = Eg ,
m= 1, 2
Euclidean Distance: d12 =(|s1 – s2|2 ) = 2 Eg,
s2
- Eg
d12
s1
0
Eg
@Y. C. Jenq
38
Probability of Error for Binary
PAM Signals with AWGN
r = sm+ n = Eg + n,
m = 1, 2
Where n is a zero mean Gaussain R.V. with variance No/2
Then
f(r|s1) = 1/(pNo)1/2exp[-(r-Eg)2/No]
and
f(r|s2) = 1/(pNo)1/2exp[-(r+Eg)2/No],
P(e|s1) = - f(r|s1)dr = (1/(2p)(2Eg/No)
0
-r2/2
e
dr
= Q[(2Eg/No)]
P(e|s2) = Q[(2Eg/No)]
and PB(e) = (1/2) P(e|s1)+ (1/2) P(e|s2) = Q[(2Eg/No)]
f(r|s2)
f(r|s1)
- Eg
Eg
@Y. C. Jenq
39
Probability of Error for
M-ary PAM Signals with AWGN
M-ary PAM systems
sm(t) = Am gT(t),
m = 1, 2, 3, .. , M,
(t) =(1/Eg) gT(t)
Then sm(t) = sm(t),
0tT
0tT
Let
where sm = Am(Eg), and Am = (2m-1-M),
m= 1, 2, …, M
i.e., Am are: -(M-1), -(M-3), … -3, -1, 1, 3, …, (M-3), (M-1)
Signal energy: Em= sm2 = Eg Am2 ,
m= 1, 2, …, M
Average signal energy: Eav= (1/M)S Em = Eg(M2-1)/3
Average power: Pav = Eav /T
@Y. C. Jenq
40
Probability of Error for
M-ary PAM Signals with AWGN
d
…
-5
-3
0
-1
1
3
5
(Eg1/2)…
r = sm+ n = AmEg + n,
m = 1, 2, 3, … M
n is a zero mean Gaussian R.V. with variance No/2
PM(e) = (M-1)/M P{ |r- sm| > Eg}
= 2(M-1)/M Q[(2Eg/No)]
= 2(M-1)/M Q{(6PavT/[(M2-1)No)]}
= 2(M-1)/M Q{(6Eav/[(M2-1)No)]}
= 2(M-1)/M Q{(6[log2(M)Ebav]/[(M2-1)No)]}
@Y. C. Jenq
41
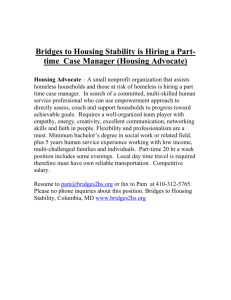
Probability of Error for
M-ary PAM Signals with AWGN
0
PM (e), Probability of Symbol Error
10
-2
10
M=16
PAM Systems
-4
10
M=8
-6
10
M=4
-8
10
M=2
-10
10
-12
10
-14
10
-10
-5
0
5
10
15
20
25
SNR/bit, dB
@Y. C. Jenq
42
Probability of Error for Coherent
PSK Signals with AWGN
PSK (Phase-Shift Keying) signals:
um(t) =(2Es/T)cos(2p fct + 2p m/M), m = 1, 2, 3, .. , M,
0tT
1(t) = (2/T)cos(2p fct ),
0tT
and 2(t) = -(2/T)sin(2p fct ),
0tT
Let
Then
um(t) = Es cos(2p m/M)1(t) + Es sin(2p m/M)2(t)
Or
um = [Es cos(2p m/M), Es sin(2p m/M)]
@Y. C. Jenq
43
Probability of Error for Coherent
PSK Signals with AWGN
Assuming the noise process n(t) is AWGN
n(t) = nc 1(t) + ns 2(t)
r = um + n = [r1,r2]
= [Es cos(2p m/M) + nc, Es sin(2p m/M) + ns]
where nc and ns are independent zero mean Gaussian
R.V.s with variances = No/2
Phase, qr, of the received vector r is tan-1(r2/r1)
@Y. C. Jenq
44
Probability of Error for Coherent
PSK Signals with AWGN
Without loss of generality, let us assume that q = 0
was transmitted, i.e., m = 0, or s0 = (Es,0)
then
r1 = Es + nc &
r 2 = ns
and
fr(r1,r2) = 1/(pNo) exp{-[(r1-Es )2 +r2 2] /No }
Let
V = (r1 2 +r2 2) and q = tan-1(r2/r1)
Then
fv,q (v,q) = v/(pNo) exp{-[v2+Es –2vEscosq] /No }
and
fq (q) = 1/(2p)e-r sin2q 0
where
-
ve-(v–(2r) cosq )2/2 dv
r = Es/No
@Y. C. Jenq
45
Probability of Error for Coherent
PSK Signals with AWGN
And the probability of error is
PM = 1 - -p/M
For M=2
p/M
fq (q) dq
P2 = Q[(2Eb/No )]
For M=4 P4 = 1-(1- P2)2 = Q[(2Eb/No )]{2- Q[(2Eb/No )]}
For M>4 PM 2 Q[(2Es/No ) sin(p/M)]
=2 Q[(2kEb/No ) sin(p/M)], k=log2(M)
@Y. C. Jenq
46
Probability of Error for Coherent
PSK Signals with AWGN
0
10
-2
PM (e), Probability of Symbol Error
10
M=16
-4
PSK Systems
10
M=8
-6
10
M=4
-8
10
M=2
-10
10
-12
10
-14
10
-5
0
5
10
15
20
25
SNR/bit, dB
@Y. C. Jenq
47
Probability of Error for Coherent
QAM Signals with AWGN
A coherent QAM system is simply a 2-channel PAM system,
Hence
PQAM = 1 - (1-PM)2
where PM = 2(1 – 1/M) Q{[(6Eav/(M-1)No]}
PQAM 1 – (1 – 2 Q{[(6Eav/(M-1)No]})2
4 Q{[(3kEbav/(M-1)No]}
R = (PQAM /PPSK ) [3/(M-1)]/[2sin2(p/M)]
R = 1 for M=4 & R > 1 for M >4, QAM is better?
@Y. C. Jenq
48
Probability of Error for Coherent
QAM Signals with AWGN
10
PM (e), Probability of Symbol Error
10
10
10
2
0
-2
QAM Systems
-4
M=64
10
-6
M=16
10
-8
M=4
10
10
-10
-12
-5
0
5
10
15
20
25
SNR/bit, dB
@Y. C. Jenq
49
Probability of Error with AWGN
QAM vs. PSK
R = (PQAM /PPSK ) [3/(M-1)]/[2sin2(p/M)]
M
10log10R
8
1.65
16
4.20
32
7.02
64
9.95
R = 1 for M=4 & R > 1 for M >4,
QAM is better than PSK?
@Y. C. Jenq
50
Probability of Error for M-ary
Orthogonal Signals with AWGN
For N-dimensional Orthogonal Signals
sm(t) = Es1/2 m(t),
m = 1, 2, 3, .. , M,
0tT
sm=( 0, 0, 0, … ,Es, …. ,0 )
Suppose that the signal s1 is transmitted, then the
received signal vector is
r=(Es+n1, n2, n3, ……. , nM )
and
• PM =
1/(2p){1-[1-Q(x)]M-1}
@Y. C. Jenq
2
-[x(2E
/N
)]
/2dx
s
o
e
51
Probability of Error for M-ary
Simplex Signals with AWGN
The same as Orthogonal signals
• PM = 1/(2p)
{1-[1-Q(x)]M-1}
2
-[x(2E
/N
)]
/2dx
s
o
e
Except the saving of signal to noise ratio by
10 log10[M/(M-1)] dB
@Y. C. Jenq
52
Probability of Error for M-ary
Bi-orthogonal Signals with AWGN
For N-dimensional Orthogonal Signals
sm(t) = Es1/2 m(t),
0tT
m = 1, 2, 3, .. , M,
sm=( 0, 0, 0, … ,Es, …. ,0 )
Suppose that the signal s1 is transmitted, then the
received signal vector is
r=(Es+n1, n2, n3, ……. , nM/2 )
and
• PM = 1/[2(2p)]
{1-[1-Q(x)]M/2-1}
@Y. C. Jenq
2
-[x(2E
/N
)]
/2dx
s
o
e
53
Union Bounds on The Probability
of Error for Orthogonal Signals
Let Em be the event that sm is received given that s1
is transmitted, then
PM = P(m=2,M Em) m=2,M P(Em)
(M-1)P2= (M-1)Q[(Es/No)] < M Q[(Es/No)]
Noting that Q[(Es/No)] < e-Es/2No
We have PM < M e-Es/2No = e-k(Eb/No-2ln2)/2, k=log2(M)
As long As Eb/No > 2ln2 = 1.39 (1.42 dB), PM 0 for large M
Shannon Limit:
Eb/No > ln2 = 0.693 (-1.6 dB)
@Y. C. Jenq
54
Union Bounds on The Probability of
Error for Orthogonal Signals
Orthogonal Signals Union Bound
PM (e), Probability of Symbol Error
10
10
0
-2
M=2
10
-4
M=4
10
-6
M=8
10
-8
M=16
10
10
10
-10
-12
-14
0
2
4
6
8
10
12
SNR/bit, dB
@Y. C. Jenq
55
Coherent Detection of FSK
Signals with AWGN
1(t)
Received
Signal
r(t)
X
2(t)
X
N(t)
X
T
r1
T
r2
0 ( )dt
0 ( )dt
To
Detector
m(t) = (2/T)1/2cos(2p fct + 2p m f t),
T
0 ( )dt
rN
Sampled at t = T
@Y. C. Jenq
56
Non-coherent Detection of FSK
Signals with AWGN
(2/T)1/2cos(2p fct+f)
X
Received
Signal
r(t)
Sampled at t = T
T
0 ( )dt
r1c
(2/T)1/2sin(2p fct+f )
X
T
0 ( )dt
r1s
(2/T)1/2cos(2p ft+2pft+f)
X
T
0 ( )dt
r2c
To
Detector
(2/T)1/2sin(2p fct+2pft+f )
X
T
0 ( )dt
@Y. C. Jenq
r2s
57
Non-coherent Detection of FSK
Signals -The Envelope Detector
(2/T)1/2cos(2p fct+f)
X
Received
Signal
r(t)
Sampled at t = T
T
0 ( )dt
(2/T)1/2sin(2p fct+f )
X
T
0 ( )dt
(r1c)2
+
(r1s)2
(2/T)1/2cos(2p ft+2pft+f)
X
T
0 ( )dt
(2/T)1/2sin(2p fct+2pft+f )
X
T
0 ( )dt
@Y. C. Jenq
(r2c)2
+
(r2s)2
58
Probability of Error for Non-coherent
Detection of FSK Signals with AWGN
fr1(r1c ,r1s)= (1/2ps2) e-(r1c2+r1s2+Es)/2s2 I{[Es(r1c2+r1s2)/s2]}
frm(rmc ,rms) = (1/2ps2) e-(rmc2+rms2)/2s2 , m=2, 3,.., M
Let R = (r1c2+r1s2)/s and Q= tan-1(rms /rmc), Then
fR1,Q1(R1 ,Q1)= (R1/2p) e-(R12+2Es/No)/2 I{[R1(2Es/No)]}
fRm,Qm(Rm ,Qm)= (Rm/2p) e-Rm2/2 , m = 2, 3,…, M
PM = 1 - Pc = 1- P(R2<R1, R3<R1…, RM<R1|R1=x)fR1(x)dx
= 1- [P(R2<R1|R1=x)]M-1fR1(x)dx
PM = n=1,(M-1) (-1)n+1(n M-1)[1/(n+1)]e –nk(Eb/No)/(n+1) , k = log2(M)
@Y. C. Jenq
59
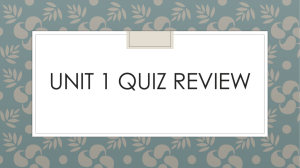
Probability of Error for Non-coherent
Detection of FSK Signals with AWGN
FSK Systems with Envelop Detector
PM (e), Probability of Symbol Error
10
10
10
10
10
0
-2
M=2
-4
M=4
-6
M=8
-8
M=16
10
10
10
-10
-12
-14
0
2
4
6
8
10
12
SNR/bit, dB
@Y. C. Jenq
60
Comparison of Modulation Methods
PAM, QAM, PSK, and Orthogonal Signals
Symbol Duration:
Bandwidth:
Bit Rate:
Normalized Data Rate:
SNR per Bit:
Bandwidth Limited:
Power Limited:
@Y. C. Jenq
T
W
Rb
Rb/W
Eb/No
Rb/W > 1
Rb/W < 1
61
Comparison of Modulation Methods
PAM:Rb/W = 2log2(MPAM)
QAM:
Rb/W = log2(MQAM)
PSK:
Rb/W = log2(MPSK)
Orthogonal: Rb/W = 2log2(M)/M
@Y. C. Jenq
62
Comparison of Modulation Methods
Digital Repeater: K repeater
Pb K Q(2Eb/No)
Analog Repeater
Pb Q(2Eb/KNo)
@Y. C. Jenq
63
Digital PAM Transmission through
Band-limited Base-band Channels
Noise n(t)
Input
Data Transmitting v(t)
Filter
GT(f)
Channel
C(f)
r(t)
y(t)
Symbol Timing
Estimator
H(f)= GT(f)C(f)
GR(f)=H*(f)e-j2pfT Output
(S/N)o = 2Eh/No
+
Receiving
Filter
GR(f)
Data
y(mT)
Detector
@Y. C. Jenq
Sampler
64
Digital PAM Transmission through
Band-limited Base-band Channels
Example 8.1.1
gT(t) = (1/2)[1 + cos(2p/T)(t-T/2)],
0<t<T
GT(f) = [sin(pfT)/pfT]/(1-f2T2) e-jpfT
H(f) = C(f) GT(f)
= GT(f), |f|<W
= 0, otherwise
C(f)
gT(t)
1
T
@Y. C. Jenq
-w
t
w
f
65
Digital PAM Transmission through
Band-limited Base-band Channels
v(t) = Sn an gT(t-nT), T is the symbol interval
r(t) = Sn an h(t-nT)+n(t), h=c*gT & n is AWGN
y(t) = Sn an x(t-nT)+u(t), x=gT*c*gR & u=n*gR
The receiver samples the received signal, y(t),
Periodically, every T seconds, and the output is
y(mT) = Sn an x(mT-nT) + u(mT), or in short,
ym = Sn an xm-n + um
ym = xoam + Snm an xm-n + um
@Y. C. Jenq
66
Digital PAM Transmission through
Band-limited Base-band Channels
n(t)
Input
Data Transmitting v(t)
Filter
GT(f)
Channel
C(f)
+
ym = xoam + Snm an xm-n + um
Output
Data
r(t)
Receiving
Filter
GR(f)
y(t)
Symbol Timing
Estimator
y(mT)
Detector
Sampler
With a matched filter
xo= h2(t)dt= |H(f)|2df= |C(f)|2|GT(f)|2df=Eh
@Y. C. Jenq
67
PAM Systems with
Inter-symbol Interference (ISI)
ym = xoam + Snm an xm-n + um
xo=Eh
The variance of um is sm2= (No/2)Eh
Snm an xm-n is the ISI
x(t)
t
@Y. C. Jenq
68
Inter-Symbol Interference
ym = xoam + Snm an xm-n + um
x(t)
t
t
@Y. C. Jenq
69
ISI and Eye Diagram
t
Eye opening
Optimal sampling time
Timing error margin
Noise margin
Maximum ISI = Snm
|xm-n |
@Y. C. Jenq
70
Probability of Error in PAM Systems
with ISI and Additive Noise
Yih-Chyun Jenq, Bede Liu, & John B. Thomas
IEEE Transactions on Information Theory
Vol. IT-23, No. 5, pp 575-582,
September 1977.
@Y. C. Jenq
71
Power Spectral Density of
PAM Systems
v(t) = Sn=- angT(t-nT)
E{V(t)} = Sn=- E(an)gT (t-nT) = maSn=- gT (t-nT)
RV(t+t,t) = E{V*(t)V(t+t)}
= Sm=- Ra[m] Sn=- gT (t-nT)gT(t+t-nT-mT)
V(t) is cyclostationary with period T !
RV(t) = (1/T) -T/2
T/2
RV(t+t,t)dt
SV(f) = (1/T) {Sm=- Ra[m]e-jm2pfT}|G(f)|2 = (1/T)Sa(f)|G(f)|2
@Y. C. Jenq
72
Power Spectral Density of
PAM Systems
Example 1:
{an} is an uncorrelated sequence
Ra[m] = sa2+ma2,
m=0 & Ra[m] = ma2, m0
Sa(f) = sa2+ma2 Sm=- e-jm2pfT = sa2+(ma2)/T Sm=- d(f-m/T)
SV(f) = (sa2 )/T |GT(f)|2+(ma2)/T Sm=- |GT(m/T)|2 d(f-m/T)
Example 1.1:
gT(t)
GT(f) = AT sin(pfT)/(pfT)e-jpfT
A
|GT(f)|2 = (AT)2 sinc2(fT)
SV(f) = (sa
2)A2T
sinc2(fT)
+
A2(ma2)d(f)
@Y. C. Jenq
T
t
73
Power Spectral Density of
PAM Systems
Example 2: {an= bn+bn-1} and bn = ±1 are uncorrelated
Ra[m] = 2, m=0,
Ra[m] = 1, m= ±1
& Ra[m] = 0,
otherwisw
Sa(f) = 4cos2(pfT) and SV(f) = (4/T) |GT(f)|2 cos2(pfT)
SV(f)
-1/T
-1/2T
1/2T
@Y. C. Jenq
1/T
f
74
Signal Design for Zero ISI
ym = x(0)am + Snm an x(mT-nT) + um
We have zero ISI (with normalized x(0)=1)
if and only if
x(0) = 1, and
x(nT) = 0 for all n 0
and
this is true if and only if
Sm X(f+m/T) = T
@Y. C. Jenq
75
Proof of Nyquist Theorem
x(nT) =
- X(f) ej2pfnTdf
= -1/2T
1/2T
Sm X(f+m/T) ej2pfnTdf
= -1/2T
1/2T
Z(f) ej2pnTf df
Z(f) = Sm X(f+m/T) is a periodic function of f with
period 1/T, and hence has a Fourier series expansion
Z(f) = Sn znej2pnTf
with zn=Tx(-nT)
For zero ISI, z0=T and zn=0 for all n≠0 Z(f) = T
@Y. C. Jenq
76
Examples of Zero-ISI Pulse
Spectrum
T
-1/T
-1/T
-1/T
-1/2T
-1/2T
-1/2T
T
T
1/2T
1/2T
1/2T
@Y. C. Jenq
1/T
1/T
1/T
f
f
f
77
Pulses with a Raised Cosine
Spectrum
For 0 ≤ a ≤ 1
Xrc(f) = T,
0 < |f| < (1-a)/(2T)
= (T/2)(1+cos{(p T/a)[|f|-(1-a)/(2T)])
= 0,
|f| > (1+a)/(2T)
x(t) = [sin(p t/T)/(p t/T)][cos(pa t/T)/(1-4a2t2/T2)]
Xrc(f)
-1/T
-1/2T
a=0
a=1
T
1/2T
@Y. C. Jenq
1/T
f
78
Raised Cosine Pulses
1
x(t), Raised Cosine Pulses
0.8
a=0
a = 0.25
a = 0.5
a = 0.75
a = 1.00
0.6
0.4
0.2
0
-0.2
-0.4
-4
-3
-2
-1
0
1
2
3
4
time, t
@Y. C. Jenq
79
Controlled Inter-symbol Interference
Partial Response Signals
Z(f) = Sn znej2pnTf with zn=Tx(-nT)
A duobinary signal pulse:
Consider x(nT) = 1,
and
x(nT) = 0,
n=0,1
otherwise
Then Z(f) = T+Te-j2pTf = 2Te-jpTfcos(pTf)
Choose X(f) = 2Te-jpTfcos(pTf), |f| <1/2T
X(f) = 0, otherwise
and x(t) = sinc(t/T) + sinc[(t-T)/T]
@Y. C. Jenq
80
Controlled Inter-symbol Interference
Partial Response Signals
Another possibility (no DC component)
Consider x(-T) = 1, x(T) = -1
and
x(nT) = 0,
otherwise
Then Z(f) = T(ej2pTf - e-jpTf)=2jTsin(pTf)
Choose X(f) = 2jTe-jpTfsin(pTf), |f| <1/2T
X(f) = 0, otherwise
and x(t) = sinc[(t+T)/T] - sinc[(t-T)/T]
@Y. C. Jenq
81
Symbol by Symbol Data Detection
with Controlled ISI
Reveived duobinary signal (am = 1 or -1)
ym = bm + vm = am + am-1 +vm
Decision feedback decoding Error Propagation
Pre-Coding: data sequence dm = 0 or 1
pm = dm – pm-1 (Mod 2) and am = 2 pm – 1
bm = am + am-1 = 2(pm+pm-1 –1)
pm+pm-1 = bm/2 + 1
Decoding rule: dm= bm/2 – 1 (Mod 2)
@Y. C. Jenq
82
Pre-Coding for Duobinary Signals
dm
1 1 1 0 1 0 0 1 0 0 0 1 1 0 1
pm 0 1 0 1 1 0 0 0 1 1 1 1 0 1 1 0
am -1 1 -1 1 1 -1 -1 -1 1 1 1 1 -1 1 1 -1
bm
0 0 0 2 0 -2 -2 0 2 2 2 0 0 2 0
dm
1 1 1 0 1 0 0 1 0 0 0 1 1 0 1
@Y. C. Jenq
83
Probability of Error for Zero ISI
For ideal PAM cases, r = sm+ n = AmEg + n, m = 1, 2, … M
n is a zero mean Gaussian R.V. with variance No/2
PM(e) = 2(M-1)/M Q{(6[log2(M)Ebav]/[(M2-1)No)]}
For zero ISI cases,
ym= x0 am+ vm,
where xo = -W |GT(f)|2df = Eg
(|GR(f)|2= |GT(f)|2)
and vm is is a zero mean Gaussian R.V. with the variance
sv2 = Eg No/2
W
PM(e) = 2(M-1)/M Q{(6[log2(M)Ebav]/[(M2-1)No)]}
@Y. C. Jenq
84
Probability of Error for
Partial Response Signals (PRS)
For partial response signals (consider binary cases),
ym= am - am-1 + vm,
and vm is a zero mean Gaussian R.V. with the
variance
sv2
= No/2 -W |X(f)|df =2No/p
W
where
|X(f)| = |GR(f)|2 =|G*T(f)|2
Therefore the price for saving bandwidth is the
decrease of the S/N by 10Log10(4/p) = 2.1 dB!
@Y. C. Jenq
85
Digitally Modulated Signals
with Memory
A
NRZ
-A
NRZI
1
0
1
1
0
@Y. C. Jenq
0
0
1
1
0
1
86
State Diagrams & Trellis
of NRZI Signals
0/0
0/1
1/1
S2= 1
S1= 0
1/0
0/-A
0/-A
1/A
S2= 1
S1= 0
1/-A
@Y. C. Jenq
87
State Diagrams & Trellis
of NRZI Signals
0/0
S1= 0
1/1
1/0
S2 =1
S1= 0
S2 =1
1/1
0/0
1/1
1/0
0/0
1/1
1/0
0/1
0/1
0/1
0/0
0/0
0/0
1/1
1/0
1/1
1/0
0/1
@Y. C. Jenq
0/1
88
Maximum Likelihood Sequence
Detector – Viterbi Algorithm
Let r1, r2, r3, r4, …are the received signals, and
sm1, sm2, sm3, sm4, …are the transmitted signals,
and rk = smk + nk
(for the m-th sequence)
For ML symbol by symbol detector
Maximize f(rk|smk) for each individual k
For ML sequential detector
Maximize f(r1, r2, r3, r4 …| sm1, sm2, sm3, sm4, …)
@Y. C. Jenq
89
Maximum Likelihood Sequence
Detector – Viterbi Algorithm
0/0
S1= 0
1/1
0/0
1/1
1/0
S2 =1
0/0
1/1
1/0
0/1
0/1
t=T
t=2T
t=3T
Minimize the Euclidean Distance: Sk (rk-smk)2
@Y. C. Jenq
90
Probability of Error for PRS
with ML Sequence Detector
1/2
S1= 1
-1/0
1/0
S2 = -1
1/2
-1/0
1/0
-1/0
1/0
-1/-2
-1/-2
-1/-2
t=0
1/2
t=T
t=2T
t=3T
P(e) = Q{[(1.5p2/16)(2Eb/No)]1/2}
10log10(1.5p2/16) = -0.34 dB
@Y. C. Jenq
91
The Power Spectrum of
Digital Signals with Memory
M symbols s1, s2, s3, ...., sM,
M waveforms s1 (t), s2 (t), s3 (t), ...., sM (t)
A Markov chian with M states
MxM state transition matrix P=[pij]
Steady State Probabilities {p1, p2, s3, ...., pM }
v(t) = Sn=- sIn(t-nT)
(In = k with Probability pk )
RV(t+t,t) = E{V*(t)V(t+t)}
= Sm=-
Sn=- sIn(t-nT)sIn+(t+t-nT-mT)
V(t) is cyclostationary with period T !
@Y. C. Jenq
92
The Power Spectrum of
Digital Signals with Memory
RV(t) = (1/T) -T/2
T/2
= (1/T) Sm=-
RV(t+t,t)dt
Si=1,KSj=1,K Rij(t-mT)pij[m]pi
where Rij(t-mT)= - si(t)sj(t+t)dt
and
pij[m]=Pm[i.j]
SV(f) = (1/T) Si=1,KSj=1,K Sij(f) Pij(f)pi
where
Sij(f)= - Rij(t)e-j2pft dt
and
Pij[f]= Sm=- pij[m] e-j2pfmT
@Y. C. Jenq
93
System Design in the Presence of
Channel Distortion
Noise n(t)
Input
Data Transmitting v(t)
Filter
GT(f)
Channel
C(f)
+
Receiving
Filter
GR(f)
r(t)
y(t)
GT(f)C(f) GR(f)=Xrc(f)e-j2pft
0
Output noise power spectral density Sv(f) = Sn(f)|GR(f)|2
For Zero ISI, ym= x0 am+ vm,
Assuming am= ± d and vm is zero mean Gaussian
with variance sv2= Sn(f)|GR(f)|2df
@Y. C. Jenq
94
System Design in the Presence of
Channel Distortion
Noise n(t)
Input
Data Transmitting v(t)
Filter
GT(f)
Channel
C(f)
+
r(t)
Receiving
Filter
GR(f)
y(t)
Xrc(f) = GT(f) C(f) GR(f)
|GR(f) = K |Xrc(f)|1/2
|GT(f) C(f)| = (1/ K) |Xrc(f)|1/2
@Y. C. Jenq
95
Channel Equalizations
Noise n(t)
Input
Data Transmitting v(t)
Filter
GT(f)
Channel
C(f)
+
GT(f) C(f) GR(f)=Xrc(f)e-j2pft
0
r(t)
Receiving
Filter
GR(f)
y(t)
Equalizer
GE(f)
GE(f)= 1/C(f)
sv2 (f)=
(No / 2) -W (|Xrc(f)|/ |C(f)|2)df
W
@Y. C. Jenq
96
Channel Equalizations
• Zero forcing Equalizer
• Mean Square Equalizer
• Minimum Probability Equalizer
•(Jenq, Thomas & Liu: IEEE 1977)
• Decision Feedback Equalizer
• Automatic (Adaptive) Equalizer
@Y. C. Jenq
97
Linear Transversal Filter
Input = y(t) = x(t)+n(t)
c-2
X
t
t
t
c-1
c0
c1
X
X
t
X
c2
X
S
Algorithm for Tap Gain Adjustment
@Y. C. Jenq
h(t)
98
Linear Transversal Filter
z(t)= Sk= - Bk h(t-kT)
h(t)= Sj=-N cj y(t-jt) = Sj=-N cj [x(t-jt)+n(t-jt)]
N
N
h(mT)= Sj=-N cj y(mT-jt)
N
or
hm= Sj=-N cjym-j
N
ZFE – Zero Forcing Equalizer
(hj= 0, -N j N, and h0= 1)
@Y. C. Jenq
99
Zero Forcing Equalizer
h(t)= Sj=-N cj x(t-jt)
N
h(mT)= Sj=-N cj x(mT-jt)
N
or
hm= Sj=-N cjxm-j
N
hm = 1, m=0
0, m= -N, -(N-1), …-2, -1, 1, 2, …(N-1), N
@Y. C. Jenq
100
Zero Forcing Equalizer
Example: x(t)= 1/ [1+(2t/T)2]
@Y. C. Jenq
101
Mean Square Equalizer
h(t)= Sj=-N cj y(t-jt) = Sj=-N cj [Sj=- Bm x(t-jt)+n(t-jt)]
N
N
h(mT)= Sj=-N cj y(mT-jt)
N
or
hm= Sj=-N cjym-j
N
E{hm –Bm}2 = Sj=-NN Sk=-NN cj ck RY(j-k)
N
2
- 2 Sk=-N ck RBY(k) + E{Bm}
where RY(j-k)=E{y(mT-jt) y(mT-kt) }
and RBY(k)=E{y(mT-kt) Bm}
Sj=-N cj RY(j-k) = RBY(k), -N k N
N
@Y. C. Jenq
102
Adaptive Equalizers
input yk
MAC
c-2
X
t
t
t
MAC
MAC
MAC
c-1
X
c0
X
t
X
c1
_
X
{ek}
@Y. C. Jenq
+
MAC
+
c2
X
S
zk
Detector
ak
103
Adaptive Equalizers
Error Function: e(cj, j=-N, …,-1,0,1,…,N)
Gradient Vector: g = de/dc
Iterative Method:
ck+1 = ck – * gk
=step size
MSE algorithm:
Error function is Mean Square Error
gk = -ek yk
ck+1 = ck + * ek yk
@Y. C. Jenq
104
Symbol Synchronization
Receiver : To know When to Sample
1. Master clock distributed
2. Clock comes with data signals
3. Clock recovered from Data signal
1. Spectral line method
2. Early-Late gate synchronizer
@Y. C. Jenq
105
Multi-Carrier Modulation &
OFDM
xk(t) = Aksin (2pfkt)
If
Then
k= 0,1,2,3, … ,(K-1)
fk - fm = n/T, where n is an integer
T
0
sin (2pfkt+jk) sin (2pfmt+jm)dt = 0
Hence “orthogonal” among all K carriers
Multi-carrier signal
x(t) = Sk=0,(K-1) Aksin (2pfkt)
@Y. C. Jenq
106
Multi-Carrier QAM Signals
xk(t) = Rkcos [k(2p/T)t] - Iksin [k(2p/T)t]
= Re{(Rk+jIk) exp[jk(2p/T)t]}
= Re{Xkexp[jk(2p/T)t]}
x(t)
= Sk=0,(K-1) Re{Xkexp[jk(2p/T)t]}
= Re{Sk=0,(K-1) Xkexp[jk(2p/T)t] }
= (1/2){Sk=0,(K-1)Xkexp[jk(2p/T)t] +
*
Sk=0,(K-1) Xk exp[-jk(2p/T)t]
@Y. C. Jenq
}
107
Multi-Carrier QAM Signals
2x(t) = Sk=0
(K-1)
Xkexp[jk(2p/T)t] +
Sk=0
(K-1)
*
Xk exp[-jk(2p/T)t]
For N=2K, and sampling 2x(t) at t = n(T/N), n = 0,1,2,.., (N-1)
We have
xn = Sk=0
= Sk=0
Xkexp[jkn(2p/N)] +Sk=0
(K-1)
Xkexp[jkn(2p/N)] +Sk=0
(K-1)
@Y. C. Jenq
(K-1)
*
Xk exp[-jkn(2p/N)]
(K-1)
Xk exp[j(N-k)n(2p/N)]
*
108
Multi-Carrier QAM Signals
xn =
(K-1)
Sk=0 Xkexp[jkn(2p/N)]
(K-1) *
+Sk=0 Xk exp[j(N-k)n(2p/N)]
Now,
Let
Yk = Xk & YN-k= Xk* for k = 1, 2,…, (K-1),
and let
We have
Y0 = 2Re(X0) & YN/2 = 0
xn =
(N-1)
Sk=0
Ykexp[jkn(2p/N)]
That is, {xn}n=0, (N-1)
is the Inverse DFT of {Yn}n=0, (N-1)
@Y. C. Jenq
109
Implementation of Multi-Carrier
QAM Signals
• Given K QAM symbols X0, X1, X2, …, X(K-1)
• For N= 2K,
let Yk = Xk & YN-k= Xk* for k = 1, 2,…, (K-1),
and let Y0 = 2Re(X0) & YN/2 = 0
• Perform Inverse DFT on {Yn}n=0, (N-1)
•
to obtain {xn}n=0, (N-1)
• Feed {xn}n=0, (N-1) to a D/A converter
at the rate of (N/T) samples per second
@Y. C. Jenq
110
Another Formulation
Consider a complex multi-carrier OFDM signal
(N-1)
x(t) = Sk=0 Xkexp[jk(2p/T)t]
Taking samples at n(T/N) for n = 0, 1, 2, …, (N-1)
We have
(N-1)
xn = Sk=0 Xkexp[jkn(2p/N)]
Necessary conditions for {xn}n=0, (N-1) to be real
are
Xk = X*(N-k) for k = 1, 2,…, (K-1), and
X0 and XN/2 are real
@Y. C. Jenq
111
Another Implementation
•
Given K QAM symbols X0, X1, X2, …, X(K-1)
•
For N= 2K,
let Yk = Xk & YN-k= Xk* for k = 1, 2,…, (K-1), and
let Y0 = Re(X0) & YN/2 = Im(X0)
•
Perform Inverse DFT on {Yn}n=0, (N-1) to obtain {xn}n=0, (N-1)
•
Feed {xn}n=0, (N-1) to a D/A converter
at the rate of (N/T) samples per second
@Y. C. Jenq
112
Frequency Spectrum Interpretation
Nyquist band
Sampling Frequency
N2p/T
W
2p/T
@Y. C. Jenq
(N-1)2p/T
113
TDMA, FDMA and CDMA
TDMA - Time Division Multiple Access
FDMA - Frequency Division Multiple Access
CDMA - Code Division Multiple Access
Multiple Access:
Many users utilize a physical channel
simultaneously
@Y. C. Jenq
114
frequency
Time Division Multiple Access
Control/Access channel & Data channels
1 2 3 4
N
1 2 3 4
N
time
Frame
Framing header
@Y. C. Jenq
115
Frequency Division Multiple Access
frequency
Control/Access channel & Data channels
N
4
3
2
1
guard
bands
time
@Y. C. Jenq
116
Code Division Multiple Access
frequency
Control/Access channel & Data channels
1, 2, 3, 4, ….. N
time
@Y. C. Jenq
117
DS-CDMA Systems
Direct Sequence, Code Division Multiple Access Systems
v(t) = Sn an gT(t-nTb)
c(t) = Sn cn p(t-nTc)
u(t) = Ac v(t) c(t) cos(2p fct), c2(t) = 1
c(t) : pseudo-random noise (PN) sequence waveform
Tb : Bit interval
@Y. C. Jenq
Tc : Chip interval
118
DS-CDMA Systems
v(t)
t
c(t)
t
v(t)c(t)
t
@Y. C. Jenq
119
Spectra of DS-CDMA Systems
V(f)
f
1/Tb
C(f)
1/Tc
f
V(f)*C(f)
f
@Y. C. Jenq
120
Demodulation of DS-CDMA
r(t) = Ac v(t) c(t) cos(2p fct)
X
X
c(t)
0 ()dt
T
gT(t)cos(2pfct)
PN signal
Generator
@Y. C. Jenq
121
Narrowband Interference
r(t) = Ac v(t) c(t) cos(2p fct) + AJ cos(2p fjt)
X
X
c(t)
0 ()dt
T
gT(t)cos(2pfct)
PN signal
Generator
Processing gain = Tb / Tc
@Y. C. Jenq
122
Wideband Interference
r(t) = Ac v(t) c(t) cos(2p fct+f)
+ nc(t)cos(2p fct) - ns (t)sin(2p fct)
X
X
c(t)
0 ()dt
T
gT(t)cos(2pfct)
PN signal
Generator
Processing gain = Tb / Tc
@Y. C. Jenq
123
M-Sequence
1 2 3 4 .
.
.
.
.
. m
+
L=2m-1
R[m] = L, m=0
= -1, otherwise
@Y. C. Jenq
124
M-Sequence
1 2 3 4
+
Gold Sequence & Kasami Sequence
@Y. C. Jenq
125
Walsh Coding
0
1
1 0
1 1
1
1
0
1
1 0
1 1
1
1
0
1
0
1
1
1
1
1
1
0
0
1
0
0
1
1
0
1
1
0
1
1
0
0
1
0
0
0
0
0
0
0
0
1
1 1
1 0
0
0
0
0
0 0
0 1
1
1
@Y. C. Jenq
126
Digital Cellular Communication
Systems
The GSM System
CDMA System – IS-95
@Y. C. Jenq
127