Community Detection - UBC Department of Computer Science
advertisement

Community Detection
Laks V.S. Lakshmanan
(based on Girvan & Newman. Finding and evaluating community
structure in networks. Physical Review E 69, 026113 (2004).
M. E. J. Newman. Fast algorithm for detecting community structure
in networks. Physical Review E 69, 066133 (2004).
The Problem
Can we partition the network into groups
s.t. the inter-group edges are sparse while
the intra-group edges are dense?
Why is it interesting/useful?
◦ Understanding comm. structure – means to
understanding n/w structure.
◦ Graph partitioning – similar problem; graph of
processes, edges=communication; assign subgraphs to processors to minimize inter-processor
comm. & balance processor load. (NP-hard in
general.)
◦ Diff. w/ graph partitioning.
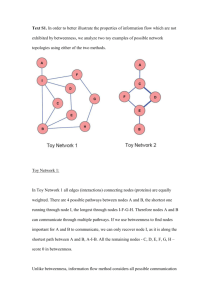
An Example with Three
Communities
A Hierarchical Clustering Approach
1.
2.
3.
4.
5.
6.
Define a notion of similarity or affinity between
nodes.
E.g.: 𝑠𝑖𝑚(𝑥, 𝑦) := #node-disjoint paths between
𝑥 and 𝑦.
𝑠𝑖𝑚(𝑥, 𝑦) := #edge-disjoint paths between
𝑥 and 𝑦.
𝑠𝑖𝑚(𝑥, 𝑦) := weighted sum of all paths, with
longer paths weighted down, e.g., Katz!
Qn: how can we compute #2, 3 fast?
(Efficient algorithms for Katz have been
developed.)
Community detection via
hierarchical clustering
Compute all pairwise node similarities for
every edge present.
Repeatedly add edges with greatest
similarity.
leads to a tree (called dendrogram).
A slice throguh the dendogram
represents a clustering or comm.
structure.
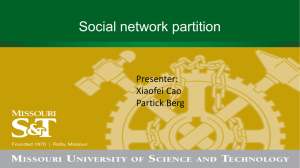
Dendrogram example
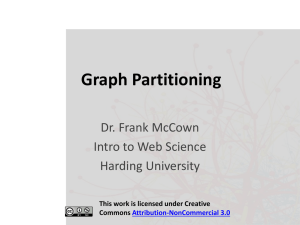
Limitations of HC approach
“Misplaces” nodes in the periphery.
1
E.g.:
5
2
4
3
Which community should 5 belong to?
Alternative approach based on “edge
betweenness”.
Key Intuition
An inter-comm. edge has a higher
“betweenness” compared to an intracomm. edge, i.e., more paths between
node pairs pass through it.
Start with G.
Repeatedly remove edges with highest
betweenness until <some stopping
criterion>.
Communities = resulting components.
Basic Algorithm
repeat {
◦ Calculate betweenness of all edges;
◦ Remove one with highest betweenness, breaking
ties arbitrarily; }
Until no edges left.
Remarks:
◦ Which betweenness score?
◦ Calculate upfront and reuse or recalculate?
◦ Can we incrementally recalculate after each edge
removal?
◦ Related algorithms for node betweenness by
Newman and Brandes.
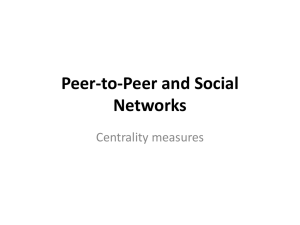
A Real Example (Zachary’s Karate Club)
With recalculation of betweenness.
Without recalculation of betweenness.
Scalability Issues
Edge betweenness for all edges can be
computed in time 𝑂(𝑚𝑛) (𝑚=#edges,
𝑛=#nodes). [Newman 2001] – details
soon.
Recalculation makes algorithm 𝑂(𝑚2𝑛),
so not feasible for large networks.
Computing edge betweenness
An Example
b
d
a
g
c
e
Compute
#geodesics from
every node to g.
f
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
b
d
d=0
w=1
a
c
g
e
f
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
b
d=1
w=1
d
d=0
w=1
a
c
e
d=1
w=1
g
f
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
d=2
w=2
b
d=1
w=1
d
d=0
w=1
a
c
d=2
w=2
e
d=1
w=1
f
g
d=2
w=2
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
d=2
w=2
d=3
w=4
b
d=1
w=1
d
d=0
w=1
a
c
d=2
w=2
e
d=1
w=1
f
g
Have all info.
we need for
edge
betweenness
now.
d=2
w=2
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
d=2
w=2
d=3 2/4
w=4
b
d=1
w=1
d
1/2
a
2/4
d=0
w=1
c
d=2
w=2
e
d=1
w=1
1/2
f
g
Note: a and f
are like leaves:
no geodesic
to g from other
nodes passes
through them.
d=2
w=2
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
d=2
w=2
d=3 2/4
w=4
b
d=1
w=1
½(1+2/4) d
1/2
a
2/4
d=0
w=1
c
½(1+2/4)
d=2
w=2
e
d=1
w=1
1/2
f
g
Note: a and f
are like leaves:
no geodesic
to g from other
nodes passes
through them.
d=2
w=2
Breadth-first search – means for doing many
things.
Computing edge betweenness
An Example
d=2
w=2
d=3 2/4
w=4
b
1/1[ 1+½(1+2/4)+1/2(1+2/4)+1/2]
d=1
w=1
½(1+2/4) d
1/2
a
2/4
d=0
w=1
c
½(1+2/4)
d=2
w=2
e
d=1
w=1
1/2
f
g
Note: a and f
are like leaves:
no geodesic
to g from other
nodes passes
through them.
d=2
w=2
Breadth-first search – means for doing many
things.
EB Computation summary
For any one target node, compute
weights of nodes by BFS; 𝑤(𝑥) =
#geodesics from 𝑥 to target.
Suppose 𝑥 𝑦 rest of 𝐺 (containing
target).
Then intuitively, 𝑤(𝑦)/𝑤(𝑥) of the
geodesics from 𝑥 to the target node go
through 𝑦.
EB Computation summary (contd.)
For any edge 𝑥𝑦 (𝑥 further from target than 𝑦),
𝑏𝑒𝑡(𝑥𝑦) = 𝑤(𝑦)/𝑤(𝑥)[1 +
𝑠𝑢𝑚 𝑜𝑓 𝑏𝑒𝑡 𝑜𝑓 𝑎𝑙𝑙 𝑒𝑑𝑔𝑒𝑠 “𝑏𝑒𝑓𝑜𝑟𝑒” 𝑡ℎ𝑖𝑠 𝑒𝑑𝑔𝑒].
The above is wrt a specific target node.
Overall bet for any edge = sum of bet wrt every
node treated as target node.
EB computation – complexity
analysis
For any one target node, BFS gives bet of
every edge w.r.t. that target node, in
𝑂(𝑚) time.
Doing so for every node treated as target
node 𝑂(𝑚𝑛) time for final
betweenness score for every edge.
Quite elegant, but recalculation bumps up
complexity to 𝑂(𝑚2𝑛).
Need more scalable approaches for CD.
On scaling up CD algorithm
determine intelligently which edges need
their bet recalculated, when an edge is
removed.
◦ When 𝑒 is removed, 𝑏𝑒𝑡(𝑒’) needs to be
recalculated only if 𝑒’ is in the same connected
component as 𝑒.
For a very large component, doesn’t prune much.
◦ Perhaps it’s only important to determine the edge
with the next highest bet.
can we maintain enough “state” so that
when 𝑒 is removed, we can recalculate
𝑏𝑒𝑡(𝑒’) incrementally, i.e., not from scratch?
Point to ponder!
Closing Remarks 1/2
Newman also proposed other bases for
defining edge betweenness.
Electrical current flow through the edge
where every edge is viewed as unit
resistance and we consider all source-sink
pairs.
Based on random walks.
Both less effective and more expensive
than geodesics (see paper for details).
What about directed and weighted cases?
Closing Remarks 2/2
Goodness metric of community division.
Helpful when we don’t know the ground truth.
Q = ∑i (eii – ai2 ), where
Ekxk= matrix of community division: eij = fraction of
edges linking comm. i to comm. j; ai = ∑j eij .
Q measures fraction of intra-comm. edges over
what is expected by chance (assuming uniform
distribution).
See paper for details of experimental results.
Turns out study of influence/information
propagation can suggest new ways of detecting
communities: will revisit this issue after we study
influence propagation.
Recommended Reading
J. Ruan and W. Zhang. An Efcient Spectral Algorithm for
Network Community Discovery and Its Applications to
Biological and Social Networks. ICDM 2007.
M. E. J. Newman "Modularity and community structure in
networks", physics/0602124 = Proceedings of the National
Academy of Sciences (USA) 103 (2006): 87577—8582.
Jure Leskovec, Kevin J. Lang, and Michael W. Mahoney.
Empirical Comparison of Algorithms for Network
Community Detection. WWW 2010.
M. E. J. Newman. Communities, modules and large-scale
structure in networks. Nature Physics 8, 25–31 (2012)
doi:10.1038/nphys2162 Received 23 September 2011
Accepted 04 November 2011 Published online 22 December
2011.