File
advertisement

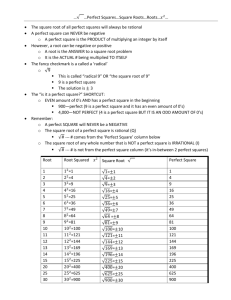
11 Lecture in math Projects Absolute value Inequalities Functions Models Presentations of the projects Write your names, student numbers, majors, topics for the presentations Stretches, translations for inequalities, functions graphs Simultaneous inequalities Non-linear inequalities Quadratic inequalities Cubic inequalities Functions In mathematics, a function is a relation between a set of inputs and a set of permissible outputs with the property that each input is related to exactly one output. An example is the function that relates each real number x to its square x2. The output of a function f corresponding to an input x is denoted by f(x) (read "f of x"). In this example, if the input is −3, then the output is 9, and we may write f(−3) = 9. The input variable(s) are sometimes referred to as the argument(s) of the function. Functions (continued) Functions of various kinds are "the central objects of investigation" in most fields of modern mathematics. There are many ways to describe or represent a function. Some functions may be defined by a formula or algorithm that tells how to compute the output for a given input. Others are given by a picture, called the graph of the function. In science, functions are sometimes defined by a table that gives the outputs for selected inputs. A function could be described implicitly, for example as the inverse to another function or as a solution of a differential equation. Functions (continued) The input and output of a function can be expressed as an ordered pair, ordered so that the first element is the input (or tuple of inputs, if the function takes more than one input), and the second is the output. In the example above, f(x) = x2, we have the ordered pair (−3, 9). If both input and output are real numbers, this ordered pair can be viewed as the Cartesian coordinates of a point on the graph of the function. But no picture can exactly define every point in an infinite set. Functions (continued) In modern mathematics, a function is defined by its set of inputs, called the domain; a set containing the set of outputs, and possibly additional elements, as members, called its codomain; and the set of all input-output pairs, called its graph. (Sometimes the codomain is called the function's "range", but warning: the word "range" is sometimes used to mean, instead, specifically the set of outputs. An unambiguous word for the latter meaning is the function's "image". To avoid ambiguity, the words "codomain" and "image" are the preferred language for their concepts.) For example, we could define a function using the rule f(x) = x2 by saying that the domain and codomain are the real numbers, and that the graph consists of all pairs of real numbers (x, x2). Collections of functions with the same domain and the same codomain are called function spaces, the properties of which are studied in such mathematical disciplines as real analysis, complex analysis, and functional analysis. Functions (continued) In analogy with arithmetic, it is possible to define addition, subtraction, multiplication, and division of functions, in those cases where the output is a number. Another important operation defined on functions is function composition, where the output from one function becomes the input to another function. Even and odd functions In mathematics, even functions and odd functions are functions which satisfy particular symmetry relations, with respect to taking additive inverses. They are important in many areas of mathematical analysis, especially the theory of power series and Fourier series. One-to-one function A function for which every element of the range of the function corresponds to exactly one element of the domain. Inverse function In mathematics, an inverse function is a function that "reverses" another function Linear function Quadratic function Power function Exponential function Logarithmic function Math modeling A mathematical model is a description of a system using mathematical concepts and language. The process of developing a mathematical model is termed mathematical modeling. Mathematical models are used not only in the natural sciences (such as physics, biology, earth science, meteorology) and engineering disciplines (e.g. computer science, artificial intelligence), but also in the social sciences (such as economics, psychology, sociology and political science); physicists, engineers, statisticians, operations research analysts and economists use mathematical models most extensively. A model may help to explain a system and to study the effects of different components, and to make predictions about behaviour. Math modeling (continued) Mathematical models can take many forms, including but not limited to dynamical systems, statistical models, differential equations, or game theoretic models. These and other types of models can overlap, with a given model involving a variety of abstract structures. In general, mathematical models may include logical models, as far as logic is taken as a part of mathematics. In many cases, the quality of a scientific field depends on how well the mathematical models developed on the theoretical side agree with results of repeatable experiments. Lack of agreement between theoretical mathematical models and experimental measurements often leads to important advances as better theories are developed. Least squares The method of least squares is a standard approach to the approximate solution of overdetermined systems, i.e., sets of equations in which there are more equations than unknowns. "Least squares" means that the overall solution minimizes the sum of the squares of the errors made in the results of every single equation. Least squares (continued) The most important application is in data fitting. The best fit in the least-squares sense minimizes the sum of squared residuals, a residual being the difference between an observed value and the fitted value provided by a model. When the problem has substantial uncertainties in the independent variable (the 'x' variable), then simple regression and least squares methods have problems; in such cases, the methodology required for fitting errors-in-variables models may be considered instead of that for least squares. Least squares (continued) Least squares problems fall into two categories: linear or ordinary least squares and non-linear least squares, depending on whether or not the residuals are linear in all unknowns. The linear least-squares problem occurs in statistical regression analysis; it has a closed-form solution. A closed-form solution (or closed-form expression) is any formula that can be evaluated in a finite number of standard operations. The non-linear problem has no closed-form solution and is usually solved by iterative refinement; at each iteration the system is approximated by a linear one, and thus the core calculation is similar in both cases. Least squares (continued) When the observations come from an exponential family and mild conditions are satisfied, least-squares estimates and maximumlikelihood estimates are identical. The method of least squares can also be derived as a method of moments estimator. Least squares (continued) The following discussion is mostly presented in terms of linear functions but the use of leastsquares is valid and practical for more general families of functions. Also, by iteratively applying local quadratic approximation to the likelihood (through the Fisher information), the least-squares method may be used to fit a generalized linear model. Least squares (continued) For the topic of approximating a function by a sum of others using an objective function based on squared distances, see least squares (function approximation). The result of fitting a set of data points with a quadratic function. The least-squares method is usually credited to Carl Friedrich Gauss (1795), but it was first published by Adrien-Marie Legendre. Population growth model A population model is a type of mathematical model that is applied to the study of population dynamics. Models allow a better understanding of how complex interactions and processes work. Modeling of dynamic interactions in nature can provide a manageable way of understanding how numbers change over time or in relation to each other. Ecological population modeling is concerned with the changes in population size and age distribution within a population as a consequence of interactions of organisms with the physical environment, with individuals of their own species, and with organisms of other species. The world is full of interactions that range from simple to dynamic. Many, if not all, of Earth’s processes affect human life. The Earth’s processes are greatly stochastic and seem chaotic to the naked eye. However, a plethora of patterns can be noticed and are brought forth by using population modeling as a tool. Population models are used to determine maximum harvest for agriculturists, to understand the dynamics of biological invasions, and have numerous environmental conservation implications. Population models are also used to understand the spread of parasites, viruses, and disease. The realization of our dependence on environmental health has created a need to understand the dynamic interactions of the earth’s flora and fauna. Methods in population modeling have greatly improved our understanding of ecology and the natural world. Predator - pray model The Lotka–Volterra equations, also known as the predator–prey equations, are a pair of firstorder, non-linear, differential equations frequently used to describe the dynamics of biological systems in which two species interact, one as a predator and the other as prey. Logistic equation A logistic function or logistic curve is a common "S" shape (sigmoid curve) Learning curve A learning curve is a graphical representation of the increase of learning (vertical axis) with experience (horizontal axis). Limit In mathematics, the limit of a function is a fundamental concept in calculus and analysis concerning the behavior of that function near a particular input. Informally, a function f assigns an output f(x) to every input x. We say the function has a limit L at an input p: this means f(x) gets closer and closer to L as x moves closer and closer to p. More specifically, when f is applied to any input sufficiently close to p, the output value is forced arbitrarily close to L. On the other hand, if some inputs very close to p are taken to outputs that stay a fixed distance apart, we say the limit does not exist. The notion of a limit has many applications in modern calculus. In particular, the many definitions of continuity employ the limit: roughly, a function is continuous if all of its limits agree with the values of the function. It also appears in the definition of the derivative: in the calculus of one variable, this is the limiting value of the slope of secant lines to the graph of a function. Continuity In mathematics, a continuous function is, roughly speaking, a function for which small changes in the input result in small changes in the output. Otherwise, a function is said to be a discontinuous function. A continuous function with a continuous inverse function is called a homeomorphism. Continuity of functions is one of the core concepts of topology, which is treated in full generality below. The introductory portion of this article focuses on the special case where the inputs and outputs of functions are real numbers. In addition, this article discusses the definition for the more general case of functions between two metric spaces. In order theory, especially in domain theory, one considers a notion of continuity known as Scott continuity. Other forms of continuity do exist but they are not discussed in this article. As an example, consider the function h(t), which describes the height of a growing flower at time t. This function is continuous. By contrast, if M(t) denotes the amount of money in a bank account at time t, then the function jumps whenever money is deposited or withdrawn, so the function M(t) is discontinuous. Derivative The derivative of a function of a real variable measures the sensitivity to change of a quantity (a function or dependent variable) which is determined by another quantity (the independent variable). It is a fundamental tool of calculus. For example, the derivative of the position of a moving object with respect to time is the object's velocity: this measures how quickly the position of the object changes when time is advanced. The derivative measures the instantaneous rate of change of the function, as distinct from its average rate of change, and is defined as the limit of the average rate of change in the function as the length of the interval on which the average is computed tends to zero. Derivative (continued) The derivative of a function at a chosen input value describes the best linear approximation of the function near that input value. In fact, the derivative at a point of a function of a single variable is the slope of the tangent line to the graph of the function at that point. The notion of derivative may be generalized to functions of several real variables. The generalized derivative is a linear map called the differential. Its matrix representation is the Jacobian matrix, which reduces to the gradient vector in the case of real-valued function of several variables. The process of finding a derivative is called differentiation. The reverse process is called antidifferentiation. The fundamental theorem of calculus states that antidifferentiation is the same as integration. Differentiation and integration constitute the two fundamental operations in single-variable calculus. Integral