Slides from completed lectures
advertisement

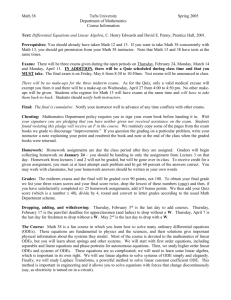
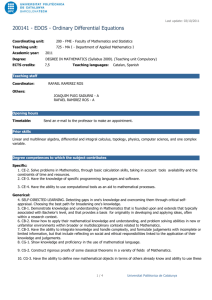
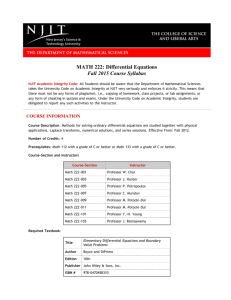
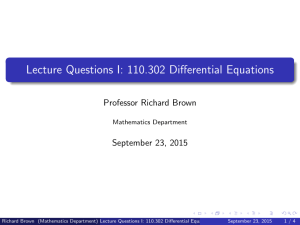
MAS222: Differential Equations Semester 1: Ordinary Differential Equations Lecturer: Jonathan Potts (j.potts@Sheffield.ac.uk) Website: http://jonathan-potts.staff.shef.ac.uk/mas222.html Chapter 1. Course information • MAS222 is a level 2 course over 2 semesters. The first semester consists of lectures (two per week) and tutorial classes (1 per week). You are required to attend all of these. • This is a techniques course, so requires practice. For this, we have provided tutorial sheets and 3 assignment sheets. In the lectures, I will explain when you should be ready to answer these. • Note: for those who have already downloaded tutorial sheets 2-9, these may change slightly. I’ve now taken the links down. So please re-download them as they re-appear. • Course website: http://jonathan-potts.staff.shef.ac.uk/mas222.html, containing lecture notes, tutorial sheets, assignment sheets, slides etc. • Please bring the lecture notes with you to all the lectures. There are empty boxes throughout the notes that need to be filled in either (i) with information written on the board in the lectures, or (ii) given to you as exercises during the lectures. • My email: j.potts@sheffield.ac.uk • I am away weeks 3 and 4, so Alex Best will be covering my lectures then. Chapter 2. Introduction to Ordinary Differential Equations (ODEs) Introduction to Ordinary Differential Equations (ODEs) • A differential equation relates a function and its derivatives • Examples: Introduction to Ordinary Differential Equations (ODEs) • A differential equation relates a function and its derivatives • Examples: Introduction to Ordinary Differential Equations (ODEs) • A differential equation relates a function and its derivatives • Examples: Here, u is the dependent variable (the variable being differentiated) x and t are independent variables (the variables we are differentiating by) Introduction to Ordinary Differential Equations (ODEs) • A differential equation relates a function and its derivatives • Examples: Here, u is the dependent variable (the variable being differentiated) One independent variable => equation is an ODE (subject of semester 1) More than one => equation is a Partial differential equation (PDE) (semester 2) x and t are independent variables (the variables we are differentiating by) Derivative as the gradient function of a curve 𝑑𝑢 Nb. The symbol 𝑑𝑡 represents a function of 𝑡, so can be evaluated at any point 𝑡 = 𝑡0 . Once evaluated, it is a (real) number. It is very important in mathematics to be aware of what type of object each symbol represents. Modelling with ODEs • Example 1. A population of organisms. Modelling with ODEs • Example 1. A population of organisms. • First attempt at a model: Modelling with ODEs • Example 1. A population of organisms. • First attempt at a model: • Second attempt: Modelling with ODEs • Example 1. A population of organisms. • First attempt at a model: • Second attempt: • Third attempt: Solving ODEs: initial conditions • Frequently, exact solutions are impossible • But sometimes they are easy to find • E.g. the simple population model 𝑑𝑛 𝑑𝑡 = 𝑏𝑛 • Solution: 𝑛 𝑡 = 𝐴𝑒 𝑏𝑡 • This is called a general solution. But what is 𝐴? • Need some more information about the system: e.g. an initial condition • Suppose the initial population is of 100 individuals: 𝑛 0 = 100. • Then 𝑛 𝑡 = 100𝑒 𝑏𝑡 . This is a particular solution (particular to this initial condition) Initial conditions and chaos • In the previous example, a small change in initial conditions only leads to a small change in the behaviour of the system • If 𝑛 0 = 99 then 𝑛 𝑡 = 99𝑒 𝑏𝑡 • If 𝑛 0 = 100 then 𝑛 𝑡 = 100𝑒 𝑏𝑡 • Right-hand plot has 𝑏 = 0.01 …but this is not always the case… Initial conditions and chaos • Consider the following system: Classification of ODEs • To figure out the best techniques for understanding a particular ODE, it is important to be able to classify it: i.e. ask yourself “what sort of ODE do I have here?” • Four ways of classifying ODEs are by • • • • Order: the order of the highest derivative Degree: the power to which the highest derivative is raised, after rationalisation Linearity: the ODE is a sum of terms linear in the independent variable or its derivatives Homogeneity: if the ODE is linear, it can be written as follows: Then it is homogeneous if 𝑏 𝑥 = 0 and inhomogeneous otherwise Solving ODEs: Linear, first order, homogeneous • Such equations look like this: 𝑑𝑦 𝑑𝑥 +𝑝 𝑥 𝑦 =0 • The general solution is 𝑦 𝑥 = Aexp − 𝑝 𝑥 𝑑𝑥 • Example 5. A population of animals with constant death rate 𝐶 and 2𝜋𝑡 fluctuating birth rate 𝐵 1 + sin : 𝑇 • Solution. Solving ODEs: Linear, first order, homogeneous • Qualitative behaviour is governed by the sign of 𝐵 − 𝐶 • Left-hand plot shows an example where 𝐵 − 𝐶 < 0, and the right-hand where 𝐵 − 𝐶 > 0 Solving ODEs: Linear, first order, inhomogeneous • Such equations look like this: 𝑑𝑦 𝑑𝑥 + 𝑝 𝑥 𝑦 = 𝑞(𝑥) • The general solution is 𝑦 𝑥 = 𝑒− 𝑝 𝑥 𝑑𝑥 𝑞(𝑥)𝑒 𝑝 𝑥 𝑑𝑥 𝑑𝑥 + 𝐴𝑒 − 𝑝 𝑥 𝑑𝑥 • The term 𝑒 𝑝 𝑥 𝑑𝑥 is called the integrating factor • Example 6. Find the solution of the following ODE, with initial condition 𝑦 0 = 0: • Solution. Separable first order ODEs (possibly non-linear) • These are often the simplest type of ODE to solve • • 𝑑𝑢 They are of the form: = 𝑔 𝑥 𝑑𝑥 1 This rearranges to 𝑑𝑢 = ℎ(𝑢) ℎ(𝑢) 𝑔 𝑥 𝑑𝑥 • If you can integrate both sides, then you’re done • But beware! Integration is a Dark Art. Many objects, even ones that seem relatively innocuous, are difficult or impossible to integrate exactly • If you don’t believe me, try calculating 3 𝑥 𝑒 𝑑𝑥. Not so easy, is it? Separable first order ODEs: Example Newton's Law of Cooling states that the rate of change of a body's temperature is proportional to the difference between the temperature 𝑇 of the body and the ambient temperature 𝑇𝑎 (assumed constant). You may recall meeting this in MAS110. i. Write down a differential equation representing the law, and find its general solution as a function of a body's initial temperature 𝑇0 (at time 𝑡 = 0). ii. Describe the solution in some detail. iii. Calculate how long it takes for the temperature of the body to reduce to half its initial value in the case that 𝑇0 > 2𝑇𝑎 . Separable first order ODEs: Example Find the solution to the following population model (Example 1): 𝑑𝑛 = 𝐵𝑛 − 𝐶0 𝑛 − 𝐶𝑛2 𝑑𝑡 where 𝑛 0 = 𝑛0 . Explain how the long-term behaviour of the solution 𝑛 𝑡 depends on the parameters 𝐵, 𝐶0 and 𝐶. The long term behaviour is as follows: (i) If 𝐸 < 0 (i.e. 𝐵 < 𝐶0 ), then 𝑛(𝑡) (ii) If 𝐸 > 0 (i.e. B > 𝐶0 ), then 𝑛 𝑡 0 as 𝑡 ∞. 𝜖 = 𝐸/𝐶 as 𝑡 ∞. In both cases, 𝐸 determines the speed of approach to the final value You should now be able to do tutorial sheet 1 Chapter 3. Qualitative analysis of ODEs Qualitative analysis of ODEs • Many systems of ODEs are too difficult to solve exactly • However, we can gain much insight by examining qualitative behaviour, i.e. things like: • What happens to the solution as the dependent variable tends to infinity? Does it tend to infinity too, or to some constant value? • How does the answer depend on initial or boundary conditions? • Do small perturbations in the system affect the outcome in a “big” way? • E.g. recall Example 5 from your notes: • 𝐵 < 𝐶: 𝐵 > 𝐶: Direction fields • Your first example of a graphical method for qualitative understanding of ODEs • Suppose 𝑑𝑢 𝑑𝑡 = 𝑓(𝑡, 𝑢) • Pick a point 𝑡, 𝑢 and draw a vector with gradient 𝑓(𝑡, 𝑢) • Repeat for many different pairs 𝑡, 𝑢 • Example. Newton’s law of cooling: 𝑑𝑇 𝑑𝑡 = −𝑘(𝑇 − 𝑇𝑎 ) Direction fields: Newton’s law of cooling 𝑇𝑎 Direction fields: another example • Consider the following equation for population growth with seasonally fluctuating births 𝑑𝑛 𝑑𝑡 =𝑛 2− 1 sin 2 𝑡 −𝑛 Autonomous equations and phase lines • An autonomous ODE is one that does not depend explicitly on the 𝑑𝑢 independent variable, e.g. = 𝑔(𝑢) 𝑑𝑡 • We can obtain qualitative information of first order autonomous ODEs by drawing the phase line, as follows • Find the values where 𝑔 𝑢 = 0 (called the equilibrium points) • For the line segments between adjacent equilibrium points, determine the sign of 𝑔 𝑢 • Draw a line with equilibrium points marked on it, and arrows to represent the sign of 𝑔 𝑢 between these points Phase line example 𝑑𝑢 𝑑𝑡 • Draw the phase line of = − 2 + 𝑢 𝑢(1 − 𝑢) • Zeros are where 𝑢 = −2, 0, 1. 𝑑𝑢 • 𝑢 < −2 means that < 0 𝑑𝑡 • • 𝑑𝑢 −2 < 𝑢 < 0 means that > 0 𝑑𝑡 𝑑𝑢 0 < 𝑢 < 1 means that < 0 𝑑𝑡 𝑑𝑢 𝑢 > 1 means that > 0 𝑑𝑡 • • This means that 𝑢 = 0 is a stable equilibrium, and 𝑢 = −1, 2 are unstable equilibria • i.e. if the initial condition is close to 0 then 𝑢(𝑡) for 𝑢 = −2, 1 𝑡 ∞ 0, but this is not true You should now be able to do tutorial sheet 2 Chapter 4. Planar, first order, autonomous systems of ODEs Definition • A planar system of ODEs is one where there are two dependent variables • If each of the ODEs is first order and autonomous, the system is known as a planar, first order, autonomous system and has the following form 𝑑𝑢 = 𝑓 𝑢, 𝑣 𝑑𝑡 𝑑𝑣 = 𝑔 𝑢, 𝑣 𝑑𝑡 • Notice that the system at time 𝑡 can be described by the position of the point (𝑢 𝑡 , 𝑣 𝑡 ), which lies on a plane, hence the word “planar” Example of a planar system • Recall Newton’s second law of motion (𝑚 stands for “mass” and 𝐹 for “force”): 𝑑2 𝑥 𝑑𝑥 𝑚 2 = 𝐹 𝑥, 𝑑𝑡 𝑑𝑡 𝑑𝑥 • Now write 𝑦 = 𝑑𝑡 • Then we can express the above second order ODE as a planar system of first order ODEs 𝑑𝑥 =𝑦 𝑑𝑡 𝑑𝑦 1 = 𝐹 𝑥, 𝑦 𝑑𝑡 𝑚 Another example of a planar system • The simple pendulum can be modelled as follows 𝑑2 𝜃 𝑚𝑙 2 = −𝑚𝑔 sin 𝜃 𝑑𝑡 where 𝑚 is the mass of the pendulum bob, 𝑙 is the length of the pendulum rod and 𝜃 is the angle of deviation from the vertical 𝑑𝑥 • Write 𝜃 = 𝑥 and 𝑦 = 𝑑𝑡 • Then we can express the above second order ODE as a planar system of first order ODEs 𝑑𝑥 =𝑦 𝑑𝑡 𝑑𝑦 𝑔 = sin(𝑥) 𝑑𝑡 𝑙 The simple pendulum Above image from https://en.wikipedia.org/wiki/Phase_portrait Video: https://vimeo.com/53710539 Nullclines • A full phase portrait can be a lot of work to plot • But much information can be gained by examining the nullclines of the system 𝑑𝑢 = 𝑓 𝑢, 𝑣 𝑑𝑡 𝑑𝑣 = 𝑔 𝑢, 𝑣 𝑑𝑡 • Nullclines are where 𝑓 𝑢, 𝑣 = 0 or 𝑔 𝑢, 𝑣 = 0, so represent respectively where 𝑢 or 𝑣 is stationary Example 12 • A simple model for the concentration of a specific self-regulating protein in a cell is given by 𝑑𝑢 𝑑𝑡 = −𝑎𝑢 + 𝑝𝑓(𝑣), 𝑓 𝑣 = ℎ𝑖 /(ℎ𝑖 + 𝑣 𝑖 ) 𝑑𝑣 = 𝑞𝑢 + 𝑝𝑣 𝑑𝑡 • Here, 𝑢 represents the concentration of protein and 𝑣 the concentration of mRNA • If you don’t know about cell transcription, look up the “central dogma of molecular biology” on the internet. There are some really nice videos like https://www.youtube.com/watch?v=9kOGOY7vthk Example 12 • Nullclines: 𝑝 𝑢= 𝑓 𝑣 𝑎 𝑏 𝑢= 𝑣 𝑞 • Look at the signs of 𝑢 and 𝑣 in each of the four regions • The blue line is the 𝑣-nullcline and red is the 𝑢-nullcline Example 12 • Nullclines: 𝑝 𝑢= 𝑓 𝑣 𝑎 𝑏 𝑢= 𝑣 𝑞 • Look at the signs of 𝑢 and 𝑣 in each of the four regions • The blue line is the 𝑣-nullcline and red is the 𝑢-nullcline 𝑢 < 0 (down) 𝑢>0 (up) 𝑣 > 0 (right) 𝑣 < 0 (left) Example 12 • Nullclines: 𝑝 𝑢= 𝑓 𝑣 𝑎 𝑏 𝑢= 𝑣 𝑞 • Look at the signs of 𝑢 and 𝑣 in each of the four regions • The blue line is the 𝑣-nullcline and red is the 𝑢-nullcline • The intersection of these two lines is an equilibrium point 𝑢 < 0 (down) 𝑢>0 (up) 𝑣 > 0 (right) 𝑣 < 0 (left) You should now be able to do tutorial sheet 3 Stability analysis on the plane • We can gain insight by examining the qualitative nature of equilibrium points • Recall that in 1D, we asked whether they are stable or unstable 𝑑𝑢 𝑑𝑡 • e.g. fixed points of = sin(𝑢) are stable if 𝑢 = (2𝑘 + 1)𝜋 and unstable if 𝑢 = 2𝑘𝜋, for integer 𝑘 • In 2D, there is also the question of stability, but there is additional richness in classification Linear systems We can gain much insight by examining the simple case of linear systems, which look like this: 𝑑𝑢 = 𝑎11 𝑢 + 𝑎12 𝑣 𝑑𝑡 𝑑𝑣 = 𝑎21 𝑢 + 𝑎22 𝑣 𝑑𝑡 …and can be written concisely like this: 𝑑𝒔 = 𝐴𝒔 𝑑𝑡 𝑎11 𝑎12 𝑢 where 𝐴 = 𝑎 and 𝒔 = 𝑎 𝑣 21 22 Notice that the origin, 𝑢 = 𝑣 = 0, is the only equilibrium point, as long as det(𝐴) ≠ 0 Linear systems • We begin by finding the eigenvectors of the system • These are the vectors 𝒘 for which 𝐴𝒘 = 𝜆𝒘 • 𝑑𝒘 Hence, 𝑑𝑡 = 𝜆𝒘 • Hence, 𝒘 𝑡 = 𝒘𝟎 𝑒 𝜆𝑡 • So if the system lies on an eigenvector at some point in time, it will remain there and move along the vector, towards the origin if 𝜆 < 0 and away if 𝜆>0 • We can see immediately that the sign of 𝜆 plays a key role in understanding the stability of the origin • Furthermore, we can see that 𝜆 = of 𝐴 and 𝐷 is the determinant 1 (𝑇 2 ± 𝑇 2 − 4𝐷) where 𝑇 is the trace Linear systems 𝜆= 1 (𝑇 ± 𝑇 2 − 4𝐷) 2 Phase portraits for linear systems • Here’s our system again: 𝑑𝒔 = 𝐴𝒔 𝑑𝑡 𝑎11 𝑎12 𝑢 where 𝐴 = 𝑎 and 𝒔 = 𝑎 𝑣 21 22 • Suppose we have two distinct eigenvalues, 𝜆1 and 𝜆2 , with corresponding (non-parallel) eigenvectors 𝒘𝟏 and 𝒘𝟐 • Then any solution can be written as a linear combination of the eigenvectors: 𝒔 𝑡 = 𝛼(𝑡)𝒘𝟏 + 𝛽(𝑡)𝒘𝟐 • With some algebra, we can show that 𝒔 𝑡 = 𝛼0 𝑒 𝜆1 𝑡 𝒘𝟏 + 𝛽0 𝑒 𝜆2𝑡 𝒘𝟐 • We can then plot trajectories for various initial conditions 𝒔 0 = 𝛼0 𝒘𝟏 + 𝛽0 𝒘𝟐 Phase portraits for linear systems • Let’s illustrate this with an example matrix: −3 1 𝐴= −2 0 • Here, 𝑇 = −3, 𝐷 = 2, and so 𝜆 = 1 𝑇 ± 𝑇 2 − 4𝐷 = −1, −2 2 1 • The eigenvector for 𝜆 = −1 is and for 2 1 𝜆 = −2, it is 1 • Hence we can plot the trajectories using our favourite graph-plotting language: Phase portraits for linear systems: spirals • Now let’s examine trajectories when the eigenvalues are not real • In this case, they will be complex conjugates (why?), which we can write as 𝜆 = 𝜎 ± 𝑖𝜔 𝜎+𝑖𝜔−𝑎11 1 1 • The corresponding eigenvectors are and where 𝑧 = 𝑎12 𝑧 𝑧 𝜎𝑡 𝑖𝜔𝑡 1 −𝑖𝜔𝑡 1 • Thus the trajectories are 𝒔 𝑡 = 𝑒 𝛼0 𝑒 + 𝛽0 𝑒 𝑧 𝑧 • But these must be real-valued, meaning 𝛼0 = 𝛽0 • Then 𝑢 𝑡 = 𝑢0 𝑒 𝜎𝑡 cos(𝜔𝑡), 𝑣 𝑡 = cos(𝜔𝑡+𝜃) 𝜎𝑡 𝑣0 𝑒 , cos(𝜃) where 𝑧 = 𝑟𝑒 𝑖𝜃 • We can now see where the spirals come from, that they spiral out if 𝜎 > 0 and in if 𝜎 < 0, and that we have closed loops if 𝜎 = 0 You should now be able to do tutorial sheet 4 Chapter 5. Linearisation of nonlinear planar systems Non-linear planar systems • “When your life is complicated… be wise, linearise” • Non-linear systems are notoriously complicated • But much insight can be gained by examining linear approximations • Let’s see how this works, with a generic planar system: 𝑢 = 𝑓 𝑢, 𝑣 𝑣 = 𝑔 𝑢, 𝑣 • Let (𝑢𝑒 , 𝑣𝑒 ) be an equilibrium point, i.e. 𝑓(𝑢𝑒 , 𝑣𝑒 ) = 𝑔(𝑢𝑒 , 𝑣𝑒 ) = 0 • To linearise, we use a Taylor expansion around this point, to give the linear approximation: where 𝑥 𝑡 = 𝑢 𝑡 − 𝑢𝑒 and y 𝑡 = 𝑣 𝑡 − 𝑣𝑒 Non-linear planar systems • The linearised system can be written succinctly as follows 𝒙 = 𝐽𝒙 𝑥 𝑓𝑢 𝑓𝑣 • Where 𝒙 = 𝑦 and 𝐽 = is called the Jacobian of the system 𝑔𝑢 𝑔𝑣 𝑢 ,𝑣 𝑒 𝑒 • Here, 𝑓𝑢 = 𝜕𝑓 , 𝑓𝑣 𝜕𝑢 = 𝜕𝑓 , 𝜕𝑣 𝑔𝑢 = 𝜕𝑔 , 𝜕𝑢 𝑔𝑣 = 𝜕𝑔 . 𝜕𝑣 • The subscript 𝑢𝑒 , 𝑣𝑒 means that the derivatives are evaluated at 𝑢𝑒 , 𝑣𝑒 • We’ll show this by an example (13) on the board Phase portrait for example 13 Example 14 This is the protein example from example 12, so recall that u(t) represents the concentration of protein at time t and v(t) the concentration of mRNA You should now be able to do tutorial sheet 5 Chapter 6. Stability in nonlinear planar systems The effect of nonlinear terms on stability • We have already done stability analysis for linear systems • …and we know how to linearise nonlinear systems • So what can we learn about a nonlinear system by performing stability analysis of the linearised system? • …and what may be missing in our analysis? • Example: • Here, the origin is the only equilibrium point. Linear analysis predicts that this is a centre, but in fact it is a spiral The effect of nonlinear terms on stability • Previous example: if linear stability analysis (LSA) suggests that an equilibrium point is a centre then it may actually be a spiral • In general, if LSA predicts a centre, a degenerate node, or a star then the result may not be correct • However, LSA gives a reliable representation of the stability of the equilibrium point as long as the trace of the Jacobian matrix is non-zero You should now be able to do tutorial sheet 6 and assignment 1 Chapter 7. Second order ODEs Linear second order ODEs • These are of the following form: • Let’s start by considering the case where 𝑓 𝑥 = 0 and the coefficients are constant, so • If we try to find a solution of the form 𝑦 = 𝑒 𝑚𝑥 then we find that 𝑎𝑚2 + 𝑏𝑚 + 𝑐 = 0. This is called the auxiliary equation • By understanding the roots of the auxiliary equation, we can calculate the solution to the whole system Second order ODEs with constant coefficients • Case I: 𝑏 2 − 4𝑎𝑐 > 0. Solution is 𝑦 = 𝐴𝑒 𝑚1 𝑥 + 𝐵𝑒 𝑚2 𝑥 where 𝑚1 and 𝑚2 are the (real) solutions to 𝑎𝑚2 + 𝑏𝑚 + 𝑐 = 0 • Case II: 𝑏 2 − 4𝑎𝑐 = 0. Solution is 𝑦 = 𝐴𝑒 𝑚1 𝑥 + 𝐵𝑥𝑒 𝑚1 𝑥 where 𝑚1 is the sole (real) solution to 𝑎𝑚2 + 𝑏𝑚 + 𝑐 = 0 • Case III: 𝑏 2 − 4𝑎𝑐 < 0. Solution is 𝑦 = 𝑒 𝜎𝑥 [𝐴cos(𝜔𝑥) + 𝐵sin(𝜔𝑥)] where σ ± 𝑖𝜔 are the solutions to 𝑎𝑚2 + 𝑏𝑚 + 𝑐 = 0 Sturm-Liouville problems • Sturm-Liouville problems are particular cases of linear second order ODEs, defined on an interval • They are existence problems – i.e. they give a set of equations and ask “when does a solution exist?” – but we can also usually find the solution where it exists • Before we give definitions of various types of Sturm-Liouville problems, we start with some examples • Example 19. Find the values of the constant 𝜆 for which the following ODE (defined on [0,1]) has solutions with boundary conditions 𝑦 0 = 𝑦 1 = 0: 𝑦 ′′ + 𝜆𝑦 = 0 • Example 20. Find the eigenvalues and eigenfunctions of the above ODE with the following boundary conditions: 𝑦′ 0 = 0, 𝑦 1 + 𝑦 ′ 1 = 0. The regular Sturm-Liouville problem • Examples 19 and 20 were both examples of regular Sturm-Liouville problems • The general form of such a problem is as follows: • In examples 19 and 20, p(x)=r(x)=1, q(x)=0, a=0 and b=1 The regular Sturm-Liouville problem • If they exist, the values of 𝜆 form a set 𝜆1 < 𝜆2 < ⋯ < 𝜆𝑛 < ⋯ where 𝜆𝑛 ∞ as 𝑛 ∞. These are called the eigenvalues of the system • Each eigenvalue has a corresponding eigenfunction 𝑦𝑛 (𝑥) You should now be able to do tutorial sheet 7 Orthogonality of eigenfunctions • For each pair of distinct eigenfunctions 𝑦𝑛 (𝑥) and 𝑦𝑚 (𝑥), we have 𝑏 𝑟 𝑥 𝑦𝑛 𝑥 𝑦𝑚 𝑥 𝑑𝑥 = 0 𝑎 • This is called the orthogonality property of eigenfunctions • Let’s derive this on the board Self-adjoint form of ODEs • A second order ODE is self-adjoint if it is of the following form [𝑝(𝑥)𝑦(𝑥)′ ]′ +𝑠 𝑥 𝑦 𝑥 = 0 (1) • Regular Sturm-Liouville equations are self-adjoint • Any arbitrary second-order linear homogeneous ODE can be written in self-adjoint form. The general form is 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • We make this self-adjoint by multiplying through by 𝑝 𝑥 = 𝑒 𝑃 𝑥 • Letting 𝑠 𝑥 = 𝑝 𝑥 𝑄 𝑥 puts this into the form of equation (1). 𝑑𝑥 Reduction of order • This is a method for finding additional solutions to a second-order linear ODE, given we already know one solution • Recall the formula for an arbitrary second-order linear ODE 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • Suppose we know a solution 𝑦 𝑥 = 𝑣(𝑥) • Then the method of reduction of order tells us that the following is also a solution 𝑥 𝑡 𝑐2 𝑦 𝑥 =𝑣 𝑥 exp − 𝑃 𝑠 𝑑𝑠 𝑑𝑡 + 𝑐𝑣(𝑥) 2 𝑣 𝑡 where 𝑐2 and 𝑐 are constants. Normal (or canonical) form • Sometimes, it is useful to transform a second order ODE so that there is no first derivative • This can make it easier to solve • To do this, start with the general linear form 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • Then, by setting 𝑦 𝑥 = 𝑢 𝑥 𝑣(𝑥), show that we can choose 𝑣(𝑥) such that 𝑢′′ + 𝑓(𝑥)𝑦 = 0 • We demonstrate this with Example 22 Chapter 7 recap • We have seen various techniques for solving equations of the type 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 (*) (linear, second order, homogeneous) • For constant 𝑃 𝑥 and 𝑄 𝑥 , and when (*) is defined on (−∞, ∞), we can solve these exactly, using the auxiliary equation • For general 𝑃 𝑥 and 𝑄 𝑥 , we may be able to use normal form to find a solution to equation (*) • Other solutions, if they exists, may be found using reduction of order • In certain cases (regular Sturm-Liouville problems), we may also be able to solve equation (*) on an interval [a,b] with boundary conditions • However, we need to put (*) into self-adjoint form first Not-quite-“regular Sturm-Liouville” problems • As is often the case in maths, it is important to check all required conditions before applying a method • Sometimes problems may look like regular Sturm-Liouville problems, perhaps because the ODE is of the form 𝑝𝑦 ′ ′ + 𝜆𝑟 + 𝑞 𝑦 = 0 • But either the boundary conditions are violated or p(x), q(x) or r(x) may be of the wrong form • Common violation 1: p(a) or p(b) are zero (instead of p(x) being strictly positive) • Common violation 2: The interval on which the problem is defined is unbounded – i.e. a or b is infinite rather than real Chapter 7 recap • We have seen various techniques for solving equations of the type 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 (*) (linear, second order, homogeneous) • For constant 𝑃 𝑥 and 𝑄 𝑥 , and when (*) is defined on (−∞, ∞), we can solve these exactly, using the auxiliary equation • For general 𝑃 𝑥 and 𝑄 𝑥 , we may be able to use normal form to find a solution to equation (*) • Other solutions, if they exists, may be found using reduction of order • In certain cases (regular Sturm-Liouville problems), we may also be able to solve equation (*) on an interval [a,b] with boundary conditions • However, we need to put (*) into self-adjoint form first • Beware of problems that look like regular Sturm-Liouville but aren’t You should now be able to do tutorial sheet 8 and Assignment 3 Chapter 8. Second order ODEs: series solutions Taylor series (revision) • You met these earlier in this module (linearisation section), back in MAS111, and they also appear in MAS211 • So you hopefully get the idea that Taylor series are really important! • Section 8.1 gives a recap of all the ideas needed here. Here’s a brief overview: • A power series about a point 𝑥0 is a function of the form ∞ 𝑎𝑛 (𝑥 − 𝑥0 )𝑛 = 𝑎0 + 𝑎1 𝑥 − 𝑥0 + 𝑎2 𝑥 − 𝑥0 𝑓0 𝑥 = 𝑛=0 • We can change coordinates∞so that 𝑥0 = 0. Let ξ = 𝑥 − 𝑥0 then 𝑎𝑛 ξ𝑛 = 𝑎0 + 𝑎1 ξ + 𝑎2 ξ2 + ⋯ 𝑓 ξ = 𝑛=0 • Re-labelling ξ as 𝑥 gives us∞(equation 206 in the notes) 𝑎𝑛 𝑥 𝑛 = 𝑎0 + 𝑎1 𝑥 + 𝑎2 𝑥 2 + ⋯ 𝑓 𝑥 = 𝑛=0 2 +⋯ Taylor series (revision) • We can test for convergence of equation (206) using the ratio test • This says that (206) converges if • i.e. need 𝑥 < 𝑎𝑛 lim 𝑛 ∞ 𝑎𝑛+1 𝑎𝑛+1 𝑥 𝑛+1 lim 𝑎𝑛 𝑥 𝑛 𝑛 ∞ exists and is less than 1 , the radius of convergence • If we differentiate equation (206) repeatedly, we find that 𝑓 0 = 𝑎0 𝑓 ′ 0 = 𝑎1 𝑓 ′′ 0 = 𝑎2 2! … 𝑓 (𝑛) 0 = 𝑎𝑛 𝑛! • Check this for yourself! Taylor series (revision) • This leads to the Maclaurin series of a function 𝑓(𝑥) (equation 208) ∞ 𝑓𝑛 0 𝑛 𝑓 𝑥 = 𝑥 𝑛! 𝑛=0 • This is a special case of the Taylor series of a function 𝑓(𝑥) about a point 𝑥0 , which is 𝑓 𝑥 = 𝑛 𝑥 𝑓 0 ∞ 𝑛=0 𝑛! (𝑥 − 𝑥0 )𝑛 (*) • If (*) does exist, and converges for all 𝑥 in a neighbourhood of 𝑥0 , then we say 𝑓(𝑥) is analytic at 𝑥 = 𝑥0 Application of Taylor series to ODEs • Recall the general form for homogeneous linear second-order ODEs 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • Then 𝑥 = 𝑥0 is called an ordinary point of the ODE if 𝑃 𝑥 and Q 𝑥 are analytic at 𝑥0 . Otherwise, it is a singular point. • Singular points occur in important ODEs, such as • Legendre’s equation: 1 − 𝑥 2 𝑦 ′′ − 2𝑥𝑦 ′ + 𝑛 𝑛 + 1 𝑦 = 0, which is used for solving, amongst other things, gravitational potential associated to a point mass. • Bessel’s equation: 𝑥 2 𝑦 ′′ + 𝑥𝑦 ′ + 𝑥 2 − 𝜈 2 𝑦 = 0, which is used to solve the Schrӧdinger equation in spherical or cylindrical coordinates. • Examples 24 and 25 show how to use power series to give solutions near ordinary points, which we’ll go through on the board Application of Taylor series to ODEs • Recall the general form for homogeneous linear second-order ODEs 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • Then 𝑥 = 𝑥0 is called an ordinary point of the ODE if 𝑃 𝑥 and Q 𝑥 are analytic at 𝑥0 . Otherwise, it is a singular point. • Singular points occur in important ODEs, such as • Legendre’s equation: 1 − 𝑥 2 𝑦 ′′ − 2𝑥𝑦 ′ + 𝑛 𝑛 + 1 𝑦 = 0, which is used for solving, amongst other things, gravitational potential associated to a point mass. • Bessel’s equation: 𝑥 2 𝑦 ′′ + 𝑥𝑦 ′ + 𝑥 2 − 𝜈 2 𝑦 = 0, which is used to solve the Schrӧdinger equation in spherical or cylindrical coordinates. • Examples 24 and 25 show how to use power series to give solutions near ordinary points, which we’ll go through on the board You should now be able to do tutorial sheet 9 Frobenius solutions • Here’s our study equation again: 𝑦 ′′ + 𝑃 𝑥 𝑦 ′ + 𝑄 𝑥 𝑦 = 0 • A regular singular point is singular, but not that singular • More precisely, 𝑥 = 𝑥0 is a regular singular point if it is singular, i.e. 𝑃 𝑥 and Q 𝑥 are not analytic, but (𝑥 − 𝑥0 )𝑃 𝑥 and (𝑥 − 𝑥0 )2 Q 𝑥 are analytic at 𝑥0 • Near regular singular points, we can find Frobenius solutions, of the form ∞ 𝑎𝑛 (𝑥 − 𝑥0 )𝑛+𝛼 y 𝑥 = 𝑛=0 where 𝑎0 ≠ 0. • Examples 26-28 show how to find such solutions Frobenius solutions continued • From examples 26-28, observe that we get at most two Frobenius solutions to second order ODEs, corresponding to 𝛼1 and 𝛼2 • We have three cases: • Case I: 𝛼1 − 𝛼2 is not an integer (example 28). Two solutions: y 𝑥 = ∞ (𝑖) (𝑥 − 𝑥 )𝑛+𝛼𝑖 for i=1,2 𝑎 0 𝑛=0 𝑛 • Case II: 𝛼1 = 𝛼2 . Here, the Frobenius method gives a single solution (example 26). The other may be found using reduction of order. • Case III: 𝛼1 − 𝛼2 is a non-zero integer (example 27). Two solutions may emerge, but if not you can use reduction of order. You should now be able to do tutorial sheet 10 THE END