3. Higher-Level Synchronization
advertisement

3. Higher-Level Synchronization
3.1 Shared Memory Methods
– Monitors
– Protected Types
3.2 Distributed Synchronization/Comm.
– Message-Based Communication
– Procedure-Based Communication
– Distributed Mutual Exclusion
3.3 Other Classical Problems
– The Readers/Writers Problem
– The Dining Philosophers Problem
– The Elevator Algorithm
Operating Systems
1
Motivation
• Semaphores are powerful but low-level
abstractions
• Programming with them is highly error prone
• Such programs are difficult to design, debug, and
maintain
– Not usable in distributed memory systems
• Need higher-level primitives
– Based on semaphores or messages
Operating Systems
2
Monitors
•
Follow the principles of abstract data types
(object-oriented programming):
– A data object is manipulated only by a set of
predefined operations
• A monitor consists of:
– A collection of data representing the state of
the resource controlled by the monitor, and
– Procedures/functions to manipulate the data
Operating Systems
3
Monitors
• Implementation must guarantee:
1. Resource is accessible by only monitor procedures
2. Monitor procedures are mutually exclusive
• For coordination, monitor provides
– “condition variable” c
• not a conventional variable, has no value, only a name
chosen by programmer
• Each c has a waiting queue associated
– c.wait
• Calling process is blocked and placed on queue
– c.signal
• Calling process wakes up waiting process (if any)
Operating Systems
4
Monitors
• Example: process p1 needs to wait until a variable
X becomes positive before it can proceed
• p1 steps out to wait on queue associated with
condition variable X_is_positive
Operating Systems
5
Monitors
• Another process may execute X_is_positive.signal
to wake up p1 when X becomes positive
• process p1 may reenter the monitor, however …
Operating Systems
6
Monitors
• Design Issue:
– After c.signal, there are 2 ready processes:
• The calling process that did the c.signal
• The waiting process that the c.signal woke
up
– Which should continue?
(Only one can be executing inside the monitor!)
Two different approaches
– Hoare monitors
– Mesa-style monitors
Operating Systems
7
Hoare Monitors
• Introduced by Tony Hoare in a 1974
http://wikipedia.org/wiki/C._A._R._Hoare
• First implemented by Per Brinch Hansen in
Concurrent Pascal
http://wikipedia.org/wiki/Per_Brinch_Hansen
• Approach taken by Hoare monitor:
– After c.signal,
• Awakened process continues
• Calling process is suspended, and placed
on high-priority queue
Operating Systems
8
Hoare Monitors
• Effect of c.signal
p1 reenters
urgent
• Signaling process has the highest priority
– It reenters as soon as p1 terminates
Operating Systems
9
Bounded buffer problem
monitor BoundedBuffer {
char buffer[n];
int nextin=0, nextout=0, fullCount=0;
condition notempty, notfull;
deposit(char data) {
if (fullCount==n) notfull.wait;
buffer[nextin] = data;
nextin = (nextin+1) % n;
fullCount = fullCount+1;
notempty.signal; }
remove(char data) {
if (fullCount==0) notempty.wait;
data = buffer[nextout];
nextout = (nextout+1) % n;
fullCount = fullCount - 1;
notfull.signal; } }
Operating Systems
10
Priority waits
• Original Hoare monitor signal resumes longest waiting
process (i.e., queue is a FIFO queue)
– May lead to unnecessary wake-ups
• Solution: Priority Waits
– Every wait operation specifies a priority p
c.wait(p)
– Waiting processes are kept sorted by p
– Smallest p = highest priority
• Reason: p frequently represents time
• Earlier events (smaller p) must be processed first
– c.signal wakes up highest-priority process (lowest p)
Operating Systems
11
Example: alarm clock
• A monitor (AlarmClock) maintains the current time value
• Time is advanced by periodic calls by hardware
• A processes can go to sleep by calling AlarmClock.wakeMe(n)
monitor AlarmClock {
int now=0;
condition wakeup;
tick() { /*invoked by hardware*/
now = now + 1;
wakeup.signal; }
wakeMe(int n) {
int alarm;
alarm = now + n;
while (now<alarm) wakeup.wait(alarm);
wakeup.signal; } }
Operating Systems
12
Example: alarm clock
• Why do we need the last wakeup.signal in wakeMe?
• tick only wakes up one process
• If there are multiple processes with same alarm time, all
must be awakened
– tick wakes up the first process
– the first process wakes up the second process, etc.
• Do we really need priority waits?
• Not for correctness but for efficiency:
– Without priority waits, all processes would need to
wake up to check their alarm settings
Operating Systems
13
Mesa-style monitors
• After issuing c.signal, calling process continues executing
• Problem: Condition cannot be guaranteed after wakeup
– Assume that p1 and p2 are waiting for some condition c
– Caller could satisfying c and wake up both processes
– Assume p1 starts and makes the condition false again
– When p2 resumes, c is not guaranteed to be true
• Solution: process must retest c after wakeup
instead of: if (!condition) c.wait
use:
while (!condition) c.wait
• This form of signal is sometimes called notify
Operating Systems
14
Protected types
• Introduced in programming language Ada (1995)
• Equivalent to special case of monitor where
– c.wait is the first operation of a procedure
– c.signal is the last operation
• wait/signal are combined into a when(cond) clause
– Procedure executes only when the condition is true
– when(cond) guards access to the procedure
(instead of: if (!cond) c.wait; )
– When some other procedure makes cond true and
terminates, it automatically enables the corresponding
when clauses (instead of c.signal)
Operating Systems
17
Example: Bounded Buffer
deposit(char c)
when (fullCount < n)
{
buffer[nextin] = c;
nextin = (nextin + 1) % n;
fullCount = fullCount + 1;
}
remove(char c)
when (fullCount > 0)
{
c = buffer[nextout];
nextout = (nextout + 1) % n;
fullCount = fullCount - 1;
}
Operating Systems
18
Distributed Synchronization
• Semaphore-based primitive requires shared memory
• For distributed memory:
– send(p,m)
• Send message m to process p
– receive(q,m)
• Receive message from process q in variable m
• Semantics of send and receive vary significantly in
different systems:
– Does sender wait for message to be accepted?
– Does receiver wait if there is no message?
– Does sender name exactly one receiver?
– Does receiver name exactly one sender?
Operating Systems
19
Types of send/receive
send
explicit
naming
implicit
naming
blocking
send m to r
wait until accepted
broadcast m
wait until accepted
nonblocking
send m to r
receive
explicit
naming
implicit
naming
blocking
wait for message
from s
wait for message
from any sender
nonblocking
if there is a message from s,
receive it; else proceed
if there is a message from any
sender, receive it; else proceed
Operating Systems
broadcast m
20
Procedure-Based Communication
• Send/Receive are low level (like P/V)
• Typical interaction: Client-Server
– Send Request, Receive Result
Make this into a single higher-level primitive
• RPC (Remote Procedure Call) or Rendezvous
– Caller invokes procedure on remote machine
– Remote machine performs operation and returns result
– Similar to regular procedure call, with some differences
• Parameters cannot contain pointers or shared
references
• Partial failure semantics
Operating Systems
30
RPC
• Caller issues:
result = f(params)
• This is translated into:
Calling Process
...
send(server,f,params);
receive(server,result);
...
Operating Systems
Server Process
process RP_server {
while (1)
{
receive(caller,f,params);
result=f(params);
send(caller,result);
}}
31
Rendezvous
• A more general procedure-based mechanism
• Introduced as part of programming language Ada
• With RPC: Called process p is part of a dedicated server
• With Rendezvous:
– p is part of an arbitrary (user) process
– p maintains state between calls
– p may accept/delay/reject call
– Setup is symmetrical:
Any process may be a client or a server
Operating Systems
32
Rendezvous
• Caller: Similar syntax/semantics to RPC
q.f(param)
where q is the called process (server)
• Server: Must indicate willingness to accept:
accept f(param) S
• Rendezvous:
– both processes wait for each other
– then server executes S (rendezvous)
– both processes continue in parallel
• (Rendezvous = meeting/date in French )
Operating Systems
33
Rendezvous
Operating Systems
34
Selective Receive
• Permit server to wait for multiple asynchronous calls
– Select statement encloses multiple accepts
– Each accept may be guarded using a when clause
select {
[when B1:] accept E1(…) S1;
or
[when B2:] accept E2(…) S2;
or
…
[when Bn:] accept En(…) Sn;
[else R] }
• Accept and process all enabled calls
• If there is no such call, execute else clause
– If no else clause, error
Operating Systems
35
Example: Bounded Buffer
process BoundedBuffer {
while(1) {
select {
when (fullCount < n):
accept deposit(char c) {
buffer[nextin] = c;
nextin = (nextin + 1) % n;
fullCount = fullCount + 1;
}
or
when (fullCount > 0):
accept remove(char c) {
c = buffer[nextout];
nextout = (nextout + 1) % n;
fullCount = fullCount - 1;
} }}}
Operating Systems
36
Readers/Writers Problem
• Extension of basic Critical Section problem
• Two types of processes entering a CS:
Readers (R) and Writers (W)
• CS may only contain
– A single W process (and no R processes); or
– Any number of R processes (and no W processes).
• A good solution should:
– Satisfy the mutual exclusion conditions
– Maximize number of simultaneous R processes in CS
– Prevent starvation of either process type
Operating Systems
42
Readers/Writers Problem
• Two possible approaches:
– R has priority over W:
when at least one R is in CS, new R’s may enter
when W exits, R’s have priority
– W has priority over R:
when a W is waiting, no new R processes may enter
when last R exits, W enters
when W exits, W’s have priority
• Both approaches satisfy mutual exclusion and
simultaneous R access, but
• Both also lead to starvation of W or R
Operating Systems
43
Readers/Writers Problem
• Solution that prevents starvation of either R or W:
– R’s are in CS:
• a new R cannot enter if a W is waiting
• the arrival of W stops the stream of R’s
• when last R exits, W enters
• W’s cannot starve
– W is in CS:
• when W leaves, all R’s that have arrived up to
that point may enter
(even those that arrived after the next W!)
• R’s cannot starve
Operating Systems
44
Solution using monitor
monitor Readers_Writers {
int readCount=0,writing=0;
condition OK_R, OK_W;
start_read() {
if (writing || !empty(OK_W))
OK_R.wait;
readCount = readCount + 1;
OK_R.signal; }
start_write() {
if ((readCount !=0)||writing)
OK_W.wait;
writing = 1; }
end_read() {
readCount = readCount - 1;
if (readCount == 0)
OK_W.signal; }
end_write() {
writing = 0;
if (!empty(OK_R))
OK_R.signal;
else OK_W.signal; } }
Operating Systems
45
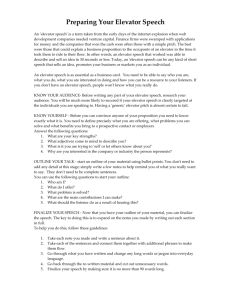
Dining philosophers Problem
• Each philosopher alternates between eating
and thinking
• Each philosopher needs both forks to eat
• Requirements
– Prevent deadlock
– Guarantee fairness:
no philosopher must starve
– Guarantee concurrency:
non-neighbors may eat
at the same time
Operating Systems
46
Dining philosophers problem
• Basic structure for each philosopher
p(i) : while (1) {
think(i);
grab_forks(i);
eat(i);
return_forks(i); }
• Each fork is a semaphore; grab=P(f[i]), return=V(f[i])
• Assume each philosopher grabs (and returns) left fork first
grab_forks(i): { P(f[i]); P(f[i+1]) }
return_forks(i): { V(f[i]); V(f[i+1]) }
• Problem: May lead to deadlock
– all grab left fork simultaneously, wait for right fork
Operating Systems
47
Dining Philosophers
• Solutions to avoid deadlock
1. Use a counter:
At most n–1 philosophers may attempt to grab forks
2. One philosopher requests forks in reverse order, e.g.,
grab_forks(1): { P(f [2]); P(f [1]) }
• Both violate concurrency requirement:
– While P(1) is eating others could be blocked in a chain
Operating Systems
48
Dining Philosophers
Solution that avoids deadlock and provides concurrency:
• Divide philosophers into two groups
• One group tries to grab left fork first, the other right fork
• For example:
– Odd-numbered philosophers (1,3,5) grab left fork first
– Even-numbered philosophers (2,4) grab right fork first
• Pairs of neighbors compete with each other, no chain
CompSci 143A
49
Elevator Algorithm
• Loosely simulates an elevator (used for disk scheduling)
• Organization of elevator
– n floors
– Elevator can be called to floor i: request(i)
– After elevator services a floor, it is released: released()
• Elevator scheduling policy
– When elevator is moving up, it services all requests at
or above current position; then it reverses direction
– When elevator is moving down, it services all requests
at or below current position; then it reverses direction
Operating Systems
50
Elevator algorithm
• Implementation as a monitor
– Two procedures: request(i) and release()
– When elevator is busy (moving or servicing a floor), request
must wait in one of two queues: upsweep or downsweep
– Elevator services upsweep when moving up and
downsweep when moving down
– Request must place itself in correct queue:
• If current position < destination, wait in upsweep
• If current position > destination wait in downsweep
• If current position = destination wait in upsweep or
downsweep depending on current direction
Operating Systems
51
Elevator algorithm
Monitor elevator {
int dir=1, pos=1, busy=0;
cond upsweep, downsweep;
release() {
busy = 0;
if (dir==up)
if (!empty(upsweep))
request(int dest) {
upsweep.signal;
if (busy) {
else {
if (pos < dest) ||
dir = down;
( (pos == dest) &&
downsweep.signal; }
(dir == up) ) )
else /*dir==down*/
upsweep.wait(dest);
if (!empty(downsweep))
else
downsweep.signal;
downsweep.wait(-dest);}
else {
busy = 1;
dir = up;
pos = dest; }
upsweep.signal; } } }
Operating Systems
52