Fast Polar Fourier Transform - Computer Science Department
advertisement

Fast Polar Fourier Transform
Michael Elad*
Scientific Computing and Computational Mathematics
Stanford University
FoCM Conference, August 2002
Image and Signal Processing Workshop
IMA - Minneapolis
* Joint work with Dave Donoho (Stanford-Statistics),
Amir Averbuch (TAU-CS-Israel), and Ronald Coifman (Yale-Math)
-1-
Collaborators
Dave Donoho
Amir Averbuch
Ronald Coifman
Statistics Department
Stanford
CS Department
Tel-Aviv University
Math. Department
Yale
-2-
Fast Polar Fourier Transform
FFT is one of top 10 algorithms of 20th century.
We'll extend utility of FFT algorithms to new
class of settings in image processing.
Create a tool which is:
Free of emotional involvement, &
Freely available over the internet.
Current Stage:
We have the tool, and its analysis,
Have not demonstrated applications yet.
-3-
Agenda
1. ThinkingThinking
Polar – Continuum
Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
Background
&
Motivation
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
New
Approach
and its
Results
8. Conclusions
-4-
1. Thinking Polar - Continuum
For today f(x,y) function of (x,y)2
Continuous Fourier Transform
f̂ u, v f x , y f x , y exp ixu iyvdxdy
Polar coordinates: u=r·cos() , v=r·sin()
~
f r , f̂ r cos(), r sin()
f x, y exp ixr cos() iy sin()dxdy
Important Processes easy to continuum polar domain.
-5-
1. Thinking Polar - Continuum
v
r
-5
0
-4
-3
1
r
-2
-1
u
2
3
0
1
4
2
5
3
4
5
6
-5
-4
-3
-2
-1
0
1
2
3
4
5
0
1
2
3
4
5
6
7
-6-
1. Thinking Polar - Continuum
Natural Operations: 1. Rotation
Using the polar coordinates, rotation is simply a shift in
the angular variable.
Q0 – planar rotation by 0 degrees
Rotation f x, y f Q x, y
0
0
In polar coordinates – shift in angular variable
~
~
f0 r , f r , 0
-7-
1. Thinking Polar - Continuum
Natural Operations: 2. Scaling
Using the polar coordinates, 2D scaling is simply a 1D
scaling in the radial variable.
S – planar scaling by a factor
Scaling f x, y f Sx, y
In polar coordinates – 1D scale in radial variable
~
~
f r , Const f r ,
Log-Polar – shift in the radial variable.
-8-
1. Thinking Polar - Continuum
Natural Operations: 3. Registration
Using the polar coordinates, rotation+shift registration
simply amounts to correlations.
f(x,y) and g(x,y): f x, y g Q x, y x 0 , y0
0
Goal: recover x 0 , y 0 , 0 .
~
Angular cross-correlation between f r , and ~
g r ,
– Estimate 0.
Rotation & cross-correlation on regular Fourier transform
gives the shift.
-9-
1. Thinking Polar - Continuum
Natural Operations: 4. Tomography
Using the polar coordinates, we obtain a method to
obtain the Inverse Radon Transform.
Radon Transform:
Rf t , f ( x , y)x cos() y sin() t dxdy
Goal: Given Rf(t,), recover f.
~
Projection-Slice-Theorem: 1Rf t , f r , .
~
Reconstruction: Rf f f̂ f .
- 10 -
1. Thinking Polar - Continuum
More Natural Operations
New orthonormal bases:
Ridgelets,
Curvelets,
Fourier Integral operations,
Ridgelet packets.
Analysis of textures.
r
Analysis of singularities.
More …
- 11 -
Agenda
1. Thinking Polar – Continuum
2.
Thinking Polar – Discrete
3. Current State-Of-The-Art
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
8. Conclusions
- 12 -
2. Thinking Polar - Discrete
Certain procedures very important to digitize
Rotation,
Scaling,
Registration,
Tomography, and
…
These look so easy in continuous theory – Can’t we
use it in the discrete domain?
Why not Polar-FFT?
- 13 -
2. Thinking Polar - Discrete
The FFT Miracles
1D Discrete Fourier Transform
Uniformly sampled in time and frequency – FFT.
Complexity – O(5Nlog2N) instead of O(N2).
2D Discrete Fourier Transform
Cartesian grid in space and frequency – Separability
Only 1D-FFT operations.
Smart memory management.
- 14 -
2. Thinking Polar - Discrete
2D DFT – Cartesian Grid
N
1
x 2n1 N 2
y
2
N
2
n
N
2 n ,n N
y
1 2
2
-
2
N
x
-
- 15 -
2D FFT Complexity
Complexity: O(10N2log2N)
instead of O(N4).
Important Feature: All
operations are 1D
– leading to
efficient cache usage
Cartesian N-by-N
Data
5N2logN
1D FFT to columns
5N2logN
1D FFT to rows
Cartesian
2D-FFT 10N2logN
- 16 -
2. Thinking Polar - Discrete
Discrete Polar Coordinates?
y
Choice of grid?
NS 1
n1 r
r
NS
r n1 0
NSr
NS 1
2n2
,
NS
n2 0
Resulting with NS
rays with NSr elements
-
x
on each:
For S=Sr=1, we
have N2 grid points.
2
NS
-
- 17 -
2. Thinking Polar - Discrete
Grid Problematics
y
Grid spacing?
Fate of corners?
-
x
No X-Y separability !!
-
- 18 -
2. Thinking Polar - Discrete
Polar FFT - Current Status
Current widespread belief - There cannot be a
fast method for DFT on the polar grid. See e.g.
The DFT: an owner’s manual, Briggs and
Henson, SIAM, 1995, p. 284.
Consequence of Non-existence:
Continuous Fourier – vague inspiration only.
Fourier in implementations widely deprecated.
Fragmentation: each field special algorithm.
- 19 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3.
Current State-Of-The-Art
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
8. Conclusions
- 20 -
3. Current State-Of-The-Art
Assessing T: Unequally-spaced FFT (USFFT)
Data in Cartesian set.
Approximate transform in non-Cartesian set.
Oriented to 1D – not 2D and definitely not Polar.
Assessing T †: For Tomography
Data in Polar coordinates in frequency.
Approximate inverse transform to Cartesian grid.
Inspired by the projection-slice-theorem.
- 21 -
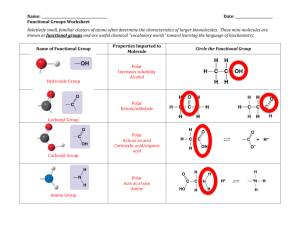
3. Current State-of-the-Art
USFFT - Rational
y
3
+ Destination Polar
grid
O Critically sampled
Cartesian grid
2
1
0
o Over-sampled
Cartesian grid
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 22 -
3. Current State-of-the-Art
USFFT - Detailed
Over-sample Cartesian grid.
Rapidly evaluate FT:
Values F.
Possibly - partial derivatives.
Associate Cartesian neighbors to each
polar grid point.
Approximate interpolation.
- 23 -
3. Current State-of-the-Art
Our Reading of Literature
Boyd (1992) – Over-sampling and interpolation
by Euler sum or Langrangian interpolation.
Dutt-Rokhlin (1993,1995) - Over-sampling and
interpolation by the Fast-Multipole method.
Anderson-Dahleh (1996) – Over-sampling and
obtaining the partial derivatives, and then
interpolating by Taylor series.
Ware (1998) – Survey on USFFT methods.
- 24 -
3. Current State-of-the-Art
USFFT Problematics
Several involved parameters:
Over-sampling factor,
Method of interpolation, and
Order of interpolation.
Good accuracy calls for extensive over-sampling.
Correspondence overhead: spoils vectorizability of
algorithm - causes high cache misses.
Emotionally involved.
- 25 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
4.
Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
8. Conclusions
- 26 -
4. Our Approach - General
We propose a
Fast Polar Fourier Transform
with the following features:
Low complexity – O(Const·N2log2N)
Vectorizability – 1D operations only
Non-Expansiveness – Factor 2 (or 4) only
Stability – via Regularization
Accuracy – 2 orders of magnitude over USFFT methods
- 27 -
Our Strategy
Fast and Exact
Fourier Trans.
on a polar-like
grid
1D
interpolations
to the polar
grid
Pseudo
Polar
Grid
- 28 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
4. Our Approach - General
5.
The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
8. Conclusions
- 29 -
5. The Pseudo-Polar FFT
Developed by Averbuch, Coifman, Donoho,
Israeli, and Waldén (1998).
Basic idea: A “Polar-Like” grid that enables
EXACT Fourier transform,
FAST computation,
1D operations only.
Applications: Tomography, image processing,
Ridgelets, and more.
- 30 -
5. The Pseudo-Polar FFT
The Pseudo-Polar Skeleton
NSr equi-spaced
concentric squares,
NSt ‘equi-spaced’
(not in angle)
We separate our
treatment to
basically vertical
and basically
horizontal lines.
y
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 31 -
5. The Pseudo-Polar FFT
Fast Fourier Transform
The destination samples
are uniformly sampled
vertically,
Per each row, destination
samples are uniformly
sampled horizontally,
Fractional Fourier
Transform is the answer
(Chirp-Z), with complexity:
O(20Nlog2N).
[Why?]
y
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 32 -
5. The Pseudo-Polar FFT
PP-FFT versus 2D-FFT
Cartesian N-by-N
Data
PP-FFT
5N2logN
1D FFT to columns
20N2logN
1D FRFFT to rows
PP-FFT
25N2logN vertical
2D-FFT
5N2logN
1D FFT to columns
5N2logN
1D FFT to rows
Cartesian
2D-FFT 10N2logN
- 33 -
5. The Pseudo-Polar FFT
The PP-FFT - Properties
Exact in exact arithmetic.
No parameters involved !!
Complexity - O(50·N2log2N) versus O(N4).
1D operations only.
For the chosen grid (Sr=St=2) - 5.
- 34 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6.
From Pseudo-Polar to Polar
7. Algorithm Analysis
8. Conclusions
- 35 -
6. From Pseudo-Polar to Polar
Fast and Exact
Fourier Trans.
on a polar-like
grid
2 stages of 1D
interpolations
to get to the
polar grid
- 36 -
6. From Pseudo-Polar to Polar
The Interpolation Stages
y
3
The original PseudoPolar Grid
Warping to equi-spaced
angles
Warping each ray to
have the same step
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 37 -
6. From Pseudo-Polar to Polar
First Interpolation Stage
y
Rotation of the rays to
have equi-spaced angles
(S-Pseudo-Polar grid):
Every row is a
trigonometric polynomial of
order N,
FRFT on over-sampled
array and 1D interpolation,
Very accurate.
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 38 -
6. From Pseudo-Polar to Polar
The Required Warping
New x
Basically vertical lines:
3
NS t
2
1
2
2m
,
y
x
y
NSr
NSt
,m NS t
2
y
2
1
0
NS t
-1
1
m 2
x y tan
2NSt m NS t
-2
2
[Why?]
-3
-3
-2
-1
0
1
2
3
Original x
- 39 -
6. From Pseudo-Polar to Polar
The Actual Interpolation
Cartesian
Data
N-by-N
PP-FFT
5N2logN
S-PP-FFT
5N2logN
1D FFT to columns
20N2logN
1D FRFFT to rows
1D FFT to columns
20N2S·log(NS)
1D Over-sampled (S) FRFFT
to rows
O{N2}
25N2logN
1D Interpolation
PP-FFT Vertical
(20S+5)N2logN
S-PP-FFT Vertical
- 40 -
6. From Pseudo-Polar to Polar
Second Interpolation Stage
y
As opposed to the previous
step, the rays are not
trigonometric polynomials
of order N,
We proved that the rays
are band-limited (smooth)
functions,
Over-sampling and
interpolation is expected to
perform well.
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 41 -
6. From Pseudo-Polar to Polar
Over-Sampling Along Rays
Over-sampling along
rays cannot be done
by taking the 1D ray
and over-sampling it.
Sr>1:
More concentric squares.
Sr longer 1D-FFT’s at the
beginning of the algorithm.
Sr times FRFFT operations.
y
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
x
- 42 -
6. From Pseudo-Polar to Polar
The Actual Interpolation
Cartesian
Data
N-by-N
N·5(NSr)·log(NSr)
Full Polar FFT
O{40SrStN2logN}
1DFFT to over-sampled columns
NSr·20(NSt)·log(NSt)
1D Over-sampled (S) FRFFT
to rows
O{(NSr)·N}
Polar-FFT Vertical
O{N·N}
1D Interpolation
1D Interpolation
S-PP-FFT Vertical
- 43 -
6. From Pseudo-Polar to Polar
To Summarize
We propose a
Fast Polar Fourier Transform
with the following features:
Low complexity – O(Const·N2log2N)
Vectorizability – 1D operations only
Non-Expansiveness – Factor 2 (or 4) only
Stability – via Regularization
Accuracy – 2 orders of magnitude over USFFT methods
- 44 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7.
Algorithm Analysis
8. Conclusions
- 45 -
7. Algorithm Analysis
We have a code performing the Polar-FFT in Matlab:
Y=Polar_FFT(X);
OR
Y=Polar_FFT(X,St,Sr);
Where: X
– Input array of N-by-N samples
St,Sr – Over-sampling factors in the approximations
Y
– Polar-FFT result as an 2N-by-2N array with rows being
the rays and columns being the concentric circles.
- 46 -
7. Algorithm Analysis
The Implementation
The current Polar-FFT code implements Taylor
method for the first interpolation stage and spline
ONLY (no-derivatives) for the second stage.
For comparison, we demonstrate the performance
of the USFFT method with over-sampling S and
interpolation based on the Taylor interpolation
(found to be the best).
- 47 -
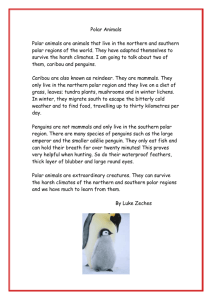
7. Algorithm Analysis
Error for Specific Signal
||Approximation error||1
2
10
• Input is random
32-by-32 array,
• USFFT method
uses one
parameter
whereas there
are two for the
up-sampling in
the Polar-FFT.
• Thumb rule:
Sr·St= S2.
Thumb rule: Sr=4St
1
10
0
10
St=1
-1
Taylor USFFT
10
-2
St=2
10
-3
10
St=4
St=3
10
20
30
40
St·Sr
or S2
50
60
70
80
90
100
- 48 -
7. Algorithm Analysis
Error For Specific Signals
Similar curves obtained of ||*|| and ||*||2 norms.
Similar behavior is found for other signals.
Conclusion: For the proper choice of St and Sr, we
get 2-orders-of-magnitude improvement in the
accuracy comparing to the best USFFT method.
Further improvement should be achieved for Taylor
interpolation in the second stage.
US-FFT takes longer due the 2D operations.
- 49 -
7. Algorithm Analysis
The Transform as a Matrix
Approximate
All the involved
transformations (accurate
and approximate) are
linear - they can be
represented as a matrix of
size 4N2-by-N2.
Ya=Ax
Or
Yt=Tx
True
- 50 -
7. Algorithm Analysis
Regularization of T/A
An input signal of N-by-N is transformed to an
array or 2N-by-2N.
For N=16, T size is 1024-by-256, and 60,000
(bad for inversion).
Adding the assumption that the Frequency
corners should be zeroed, we obtain
y TPolar x
TPolar
y
T
x 0
Corner
and the condition number becomes 5 !!!
- 51 -
7. Algorithm Analysis
Discarding the Corners?
If the given signal was
sampled at 1.4142 the
Nyquist Rate, the
corners can be
removed.
If it is not, oversampling it can be done
by FFT.
2
2
-
2
2
-
- 52 -
7. Algorithm Analysis
Error Analysis – Worst Signal
Approximation error is :
Worst error :x worst , e
2
worst
A
Polar FFT
Arg / Max
A
T x ePolar FFT
Polar FFT
TPolar x
2
2
2
x2
x
2
Worst relative error : x rworst , erworst
Arg / Max
x
A
2
Polar FFT
TPolar x 2
2
TPolar x 2
- 53 -
7. Algorithm Analysis
Worst Signal - Results
N=16 TC 1024256, S=Sr=St=4
USFFT
worst signal (abs.
Value) =3.469
Polar-FFT
worst signal (abs.
Value) =0.0319
The worst case
signal in the freq.
Domain (abs. and
shifted)
The worst case
signal in the freq.
Domain (abs. and
shifted)
- 54 -
7. Algorithm Analysis
Relative Worst Signal - Results
Same parameters: N=16 TC 1024256, S=Sr=St=4
USFFT
worst signal (abs.
Value) =0.0613
Polar-FFT
worst signal (abs.
Value) =0.0023
The worst case
signal in the freq.
Domain (abs. and
shifted)
The worst case
signal in the freq.
Domain (abs. and
shifted)
- 55 -
7. Algorithm Analysis
Comparing Approximations
Solve for the eigenvalue/vectors of the matrix
A
Polar FFT
TPolar H APolar FFT TPolar
and obtained k , xk k 1 ( k in ascending order).
N2
Compare to A USFFT by computing
2
k A USFFT TPolar xk 2
using the above eigenvectors and compare to k.
- 56 -
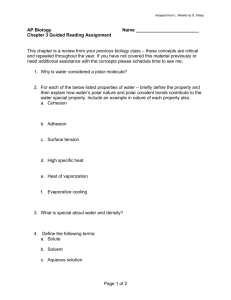
7. Algorithm Analysis
Comparing Approximations - Results
2
Mean Squared Error
10
[N=32]
0
10
USFFT
-2
10
-4
10
-6
10
Polar-FFT
-8
Eigen-space
of the PolarFFT
10
-10
10
0
200
400
600
800
1000
1200
- 57 -
Agenda
1. Thinking Polar – Continuum
2. Thinking Polar – Discrete
3. Current State-Of-The-Art
4. Our Approach - General
5. The Pseudo-Polar Fast Transform
6. From Pseudo-Polar to Polar
7. Algorithm Analysis
8.
Conclusions
- 58 -
8. Conclusions
We have proposed a fast, accurate, stable, and
reliable Polar Discrete-Fourier-Transform.
By this we extend utility of FFT algorithms to
new class of settings in image processing.
Future plans:
Extend the analysis and improve further,
Demonstrate applications,
Publish the code for the procedure and some
applications over the internet.
- 59 -
Beyond this slides are
the appendix or
redundant slides
- 60 -
3. Current State-of-the-Art
USFFT for T†
Over-sample Polar grid (and possibly
partial derivatives).
Associate polar neighbors to each
Cartesian grid point.
Approximate interpolation to get the
Cartesian grid values.
Perform the Cartesian 2D Inverse-FFT.
- 61 -
3. Current State-of-the-Art
Our Reading of Literature
Direct Fourier method with over-sampling and
interpolation (also called gridding) – see
Natterer (1985).
Jackson, Meyer, Nishimura and Macovski (1991).
Schomberg and Timmer (1995).
Choi and Munson (1998).
- 62 -
A. The Fractional Fourier Transform
The Pseudo-Polar Sampling
Basically vertical lines:
NS r
1
2 2
y
NS
r NS r
2
NS t
2
1
y
3
2
1
0
2m
y
x
NSt
m NS t
2
-1
For St=Sr=1, we have
N2 grid points
-3
-2
-3
-2
-1
0
1
2
3
x
- 63 -
A. The Fractional Fourier Transform
The Pseudo-Polar FT – Stage 1
F x , y
N1
N1
k1 0
k 2 0
f k1 ,k 2 exp ik1x ik 2 y
N1
N1
k1 0
k 2 0
2m
f k1 ,k 2 exp ik1
y ik 2y
NS t
N1
k1 0
2m
exp ik1
y
NS t
N1
k 2 0
f k1 ,k 2 exp ik 2 y
f̂ k1 ,
This part is obtained by 1D-FFT along the rows !!
- 64 -
A. The Fractional Fourier Transform
The Pseudo-Polar FT – Stage 2
N1
2y
F x , y F[m, ] f̂ k1 , exp ik1m
NSt
k1 0
This summation takes columns of f̂ k1 , (being equispaced 1D signals) and computes Fourier transform of it.
The destination grid points are also 1D equi-spaced in
the frequency domain, BUT THEY ARE NOT IN THE
RANGE [-,], but rather [-y,y].
This task is called Fractional Fourier/Chirp-Z Transform.
- 65 -
A. The Fractional Fourier Transform
Fractional Fourier Transform
N1
2km
F[m] f k exp i
N
k 0
For =1 we get the ordinary 1D-FFT,
For =-1 we get the ordinary 1D-IFFT,
There exists a Fast Fractional Fourier Transform with the
complexity of O(20·Nlog2N), based on 1D-FFT operations.
See: Fast fractional Fourier transforms and applications, by D. H. Bailey and P. N.
Swarztrauber, SIAM Review, 1991, and also Bluestein, Rabiner, and Rader (1960’s).
- 66 -
A. The Fractional Fourier Transform
FR-FFT Detailed
N1
2km
F[m] f k exp i
N
k 0
N 1
m2
i
N1
e N
f
k 2
i
e N
k m2 k 2 m2
f k exp i
N
k 0
k
k 0
Post
Multiplication
k m2
exp i
N
Pre-Multiplication
Convolution
[Back]
- 67 -
B. From Pseudo-Polar to Polar
Interpolation As 1D Operation
F x , y
N1
N1
k1 0
k 2 0
N1
k1 0
N1
k1 0
f k1 ,k 2 exp ik1x ik 2y
m
exp ik1 tan
y
2NS t
N1
k 2 0
f k1 ,k 2 exp ik 2y
m ˆ
exp ik1 tan
y f k1 ,
2NS t
It is a 1D operation – But it is not the Fractional-FFT.
Can be computed by over-sampled FRFFT and interpolation.
- 68 -