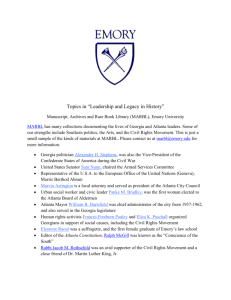
Fundamental Concepts and Relationships
advertisement

Rotorcraft Design I Day Two: Rotorcraft Modeling for Hover and Forward Flight Dr. Daniel P. Schrage Professor and Director Center of Excellence in Rotorcraft Technology (CERT) Center for Aerospace Systems Analysis (CASA) Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Presentation Outline • Fundamental Concepts and Relationships • Induced Power Required – Hover – Forward Flight • Rotor Profile Power Required – Hover – Forward Flight • Parasite Power Required • Simplified Trim (Moment Trim) • Example Problems Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 The Iterative Nature of Aerospace Synthesis Initiation and Coordination Phase Change requirements Requirements Change concept Change technology assumptions Concepts/Tech Select search techniques Change methodology Select Methodology Change parametric variables Select parametric variables W Fuel Balance W Sizing Design Iteration Select ranges for parametric variables Synthesis and Analysis Phase Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Optimum Configuration Fixed Wing Aircraft Vehicle Synthesis Design Layout (3-View) Constraints 2 Aero Aero Data Propulsion 1 Sizing Fuel Balance 3 Project Manager Fuel Required T/W SFC 4 Weight Control Optimization Fuel Available 5 Cost Cost 6 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Rotorcraft/VSTOL Aircraft Synthesis ( RF Method) Requirements Performance Modelsls Synthesis Configuration Solution Engine Power Available Hover Alt. Vehicle Hover Temp. Power Block Speed Loading Block Alt.itudes ROC/Maneuver Vehicle Power Required Installed Power HP i Empty Fraction Mission Input Fuel Weight Ratio Available Payload Gross Block Range Hover Time Mission Analysis Agility Fuel Weight Ratio Required Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Vehicle Weight RF Method Key Relationships IF: Fuel Ratio Required = Fuel Ratio Available Horsepower Required = Horsepower Available A Configuration Solution can be found to meet the Customer’s Mission & Performance Requirements THEN: The Concept Is FEASIBLE!! Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Rotorcraft/VSTOL Aircraft Synthesis ( RF Method) Requirements Performance Modelsls Synthesis Configuration Solution Engine Power Available Hover Alt. Vehicle Hover Temp. Power Block Speed Loading Block Alt.itudes ROC/Maneuver Vehicle Power Required Installed Power HP i Empty Fraction Mission Input Fuel Weight Ratio Available Payload Gross Block Range Hover Time Mission Analysis Agility Fuel Weight Ratio Required Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Vehicle Weight Achieving a Fuel Balance and Initial Gross Weight R FR Wl AT 1 1.05 WG AT 12 W AR 1 U WG 3 2 TH 4560 H AR 1 2 3 1 e d 2 M C H RE L 650 c V D V 1 WU RFA 1 1 K WG Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 WG WU 1 1 AR 1 K AT 1 K 2 1 1 1.05 1 AR 1 K 1 AR 1 K W G WU 3 2 Achieving a Power Balance Total Horsepower Required(THP) for Generic Subsonic Fixed Wing and Rotorcraft: WG 1 ihp H fV 3 0.332 1 32 THP 1 K K K K rhp L L u H 146000 p e p b V H 2 Uo V K 1 3 2 C 4 Ku KL 3 ihp H rhp H 0.0938 2 R 2 B AB 1.85 3 VTo 2 m Horsepower Available(HPA) as a Function of Altitude, Temp, Time, and No. of Engines: HPA= HP*(N-1)(1-Kh1h1)(1-Ktdelta TS)(1+e-0.0173t) N 4 THP = HPA for Hover, Forward Speed, Maneuver Critical Power Loading(THP/GW) sizes the Engine Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Power Required Comparison for Fixed Wing and Rotary Wing Aircraft Pr Total Parasite Profile Rotary Wing Induced V Pr Total Parasite Fixed Wing Induced V Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Note: High, Hot Day (4000’, 95o F) increases HP required Rotorcraft Sizing Issues • HP required is determined for either hover out-of ground effect (HOGE), forward speed, or manu requirement; In the notional example below . . . • if speed reqmt. is 100 kts, the rotor and engine will be sized for hover condition • if the speed reqmt. Is, say, 250 kts, the rotor/engine will be sized for fwd flight HP required • Conditions (altitude and ambient temperature) also affect rotorcraft sizing Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Army Hot Day (4000’, 95o F) Normal Day 100 kts 250 kts Velocity Derivation of Power Required and Steady State Thrust Equations • Induced Velocity and Power of a Rotor in Hover and Forward Flight • Determination of Rotor Profile Power • Steady State Thrust and Equilibrium Cyclic Pitch Equations for Straight and Level Flight Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols a = Airfoil section lift-curve slope, dCL/dα, rad-1,or speed of sound = (γgRT)1/2, fps AB = Effective blade area of rotor (projected to centerline of rotation) = bcR, ft2 AD = Rotor disk area = .785D2, ft2 AR = Aspect ratio Aw = Fuselage wetted area, ft2 Aπ = Equivalent flat plate area, ft2 b = No. of rotor blades B = Blade tip loss factor BSFC = Brake specific fuel consumption, lbs/bhp-hr c = Airfoil chord, ft CD = Parasite drag coefficient based on frontal area Cdomin = Blade section drag coefficient at CL = 0 CLr = Rotor mean blade lift coefficient Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols D = Rotor diameter, ft, or Parasite Drag, lbs E = Endurance g = Acceleration due to gravity, ft/sec2 ahp = for Horsepower available at engine output shaft chp = Horsepower available for vertical climb = (η – Ktr)ahp-RhpH-hpacc ihp = Rotor induced horsepower php = Parasite horsepower rhp = Total horsepower required = [1/ (η – Ktr)][ihp + Rhp + php + hpacc] Rhp = Rotor profile horsepower hpacc = Accessory horsepower hpaux= Auxiliary horsepower hptr = Total tail rotor horsepower Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols i = Stabilzer incidence relative to fuselage W.L., degrees Ktr = Tail rotor power factor = hptr/(1/η)(ihp + Rhp + php + hptr + hpacc) Ku = Induced velocity factor Kμ = Profile power factor lst = horizontal stabilizer moment arm (distance between main rotor centerline and tail rotor centerline), ft ltr = Tail rotor moment arm (distance between main rotor centerline and tail rotor centerline), ft L = Lift, lbs M = Mach No. P = Absolute pressure, lbs/ft2 q = dynamic pressure = ½ ρV2, lbs/ft2 Q = Rotor torque, lb-ft Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols R = Rotor radius, ft, or Gas constant for dry air = 53.3 ft.lb/lboR R/Cmax = Maximum rate of climb, fpm R/CV = Vertical rate of climb, fpm S = Frontal area, ft2 T = Rotor thrust, lbs, or = Absolute temperature, oR u = Induced velocity, fpm uc = Induced velocity in climb, fpm uH = Induced velocity in hover, fpm ui = Induced velocity in forward flight, fpm up = Equivalent inflow velocity to overcome fuselage parasite drag, fpm uR = Equivalent inflow velocity to overcome rotor profile drag, fpm Uc = Total inflow velocity in climb, fpm Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols vd = Rate of descent in autorotation, fpm V = Forward velocity, fps or knots Vclimb = Velocity for best rate of climb, knots Vcr = Cruising velocity, knots VT = Rotor tip speed, RΩ, fps w = Rotor disk loading, lbs/ft2 W = Gross Weight, lbs z = Rotor height above the ground (reference to teetering point or top of hub) αf = Fuselage angle of attack (angle between fuselage W.L. and horizontal), deg αr = Blade section angle of attack, degs or radians δ = Blade section drag coefficient η = Mechanical efficiency θT = Blade twist (referenced to centerline rotation), degrees Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 List of Symbols λ’ = Inflow velocity ratio = u/VT = (ui + uR + up)/VT Λ = Induced power correction factor due to ground effect μ = Tip speed ratio = V/VT ρ = Density, slugs/ft3 σ = Rotor solidity = bc/πR Ψ = Rotor azimuth angle, degrees Ω = Rotor angular velocity, rad/sec Subscripts: mr = Main rotor st = Stabilizer tr = Tail rotor Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Fundamental Concepts and Relationships • Rotor Theory may best be understood by beginning with the hover and vertical climb flight conditions. • No dissymmetry of velocity across the disk • Simple momentum theory (actuator disk theory) • The axial velocity of fluid through airscrew disk is higher than speed with which airscrew is advancing. • The increase of velocity at the airscrew arises from the production of thrust (T) and is called the induced velocity (u) • Thrust developed by airscrew is product of mass air flow through disk per unit time and the total increase in velocity. Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Momentum Theory • Stems from Newton’s second law of motion, F=ma, and is developed on the basis that the axial velocity of the fluid through the airscrew disk is generally higher than the speed with which the airscrew is advancing through the air • The increase in velocity of the air from its initial value to its value at the airscrew disk, which arises from the production of thrust, is called the induced or downwash velocity, and is denoted by u • The thrust developed by the airscrew is then equal to the mass of air passing through the disk in unit time, multiplied by the total increase in velocity caused by the action of the airscrew Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Momentum Theory Model P1 V P2 P3 V + aV P4 V + bV • Because of the increase in velocity of air mass by the rotor there is gradual contraction of slipstream • Airscrew advancing to left with freestream velocity V • Velocity increase at disk (aV), downstream (bV) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Simple Momentum Theory Assumptions • The power required to produce the thrust is represented only by the axial kinetic energy imparted to the air composing the slipstream • A frictionless fluid is assumed so that there is no blade friction or profile-drag losses • Rotational energy imparted to the slipstream is ignored • The disk is infinitely thin so that no discontinuities in velocities occur on the two sides of the disk Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Generation of Thrust • From momentum theory the thrust is: T M (V) T A(V aV)(V bV - V) T A(V aV)(bV) (1) (2) • Thrust may also be expressed as: T (P3 - P2 )A Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (3) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Apply Bernoulli’s Principle • It is applied ahead of the disk and behind the disk P1 ρV P2 ρV aV 1 2 2 2 1 2 P1 P2 12 ρV aV 12 ρV 2 2 (4) and P3 ρV aV P4 ρV bV 2 1 2 1 2 2 P4 P3 ρV aV ρV bV 1 2 But P1 P4 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 2 1 2 2 (5) Apply Bernoulli’s Principle • Equating Equations (4) and (5) P2 12 ρV aV 12 ρV 2 2 P3 12 ρV aV 12 ρV bV 2 2 P2 12 ρV 2 P3 12 ρV bV 2 P3 P2 ρbV 1 b 2 1 2 2 (6) • Substituting Equation (6) in (3) T bV 2 1 12 b A Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (7) Apply Bernoulli’s Principle • Equating Equations (2) and (7) ρAV aV bV ρAbV ρAb V 2 2 1 2 2 ρAbV AabV ρAbV ρAb V 2 2 2 1 2 2 2 a 12 b 2a b (8) • Half of the increase in velocity produced by rotor occurs just above the disk and half occurs in the wake Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Calculation of Induced Velocity • The velocity induced by the rotor in the hovering state is the total velocity through the disk. aV u and bV 2u • Substituting in Equation (2) T A(V u )( 2u ) T 2 R 2u 2 where A R 2 T 2 or u 2 R 2 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (9) Induced Velocity in terms of Disk Loading • Since disk loading is equal to the thrust divided by the disk area, the induced velocity in hovering may be expressed in terms of disk loading as: u Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 w 2 (10) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Accounting for Blade Tip Losses • For a rotor with finite number of blades, a factor should be introduced which accounts for the reduction of thrust near the blade tips • In the production of lift there is a differential pressure between upper and lower surfaces of blade • Air at the tip tends to flow from bottom to top, destroying the pressure difference and thus the lift in the tip region. • Important variables in determining the losses are the number of blades and the total loadin on the blade. Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Accounting for Blade Tip Losses • The empirical equation used to find B, the tip loss factor is: 2CT (11) B 1 b where b is the number of blades per rotor T C T is the thrust coefficien t equal to R 2VT2 where VT is the blade tip speed equal to R Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Relating Induced Velocity to Disk Loading • For preliminary analyses, it is sufficient to assume B a constant. • A value of B = .97 has been assumed to be reasonable for main rotors. • More highly loaded rotors such as propellers will have more tip losses • The tip loss factor is incorporated into the equations for induced velocity. u Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 w 2 B 2 (12) Blade Tip Loss Factor vs. Thrust Coefficient Balde Tip Loss Factor B 1 0.98 # of Blades 0.96 4 3 0.94 0.92 2 0.9 0 0.004 0.008 Thrust Coefficient Ct Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 0.012 0.016 Uniform Induced Velocity Distribution in Hover • The thrust developed in hovering, considering uniform induced velocity distribution by an annular section of actuator disk of radius r and width dr is given by: T M (V ) dT (2rdr )u H (2u H ) R R Y dT (2rdr )u H (2u H ) 0 T 4u Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 0 2 H R 0 rdr Uniform Induced Velocity Distribution in Hover • Integrating with respect to r and evaluating T 2R 2 u H2 and u 2 H T 2R (13) 2 • Substituting (BR)2 for R2 gives: w T uH where w 2 2 2 B R Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (14) Induced Power Based on Uniform Inflow Tu H ihp H 550 (15) • Substituting equation (11) T w ihp H 2 550 2 B Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (16) Triangular Induced Velocity Distribution in Hover • The use of highly tapered and twisted blades theoretically tends to approach the ideal uniform distribution flow condition • Actual distribution is probably more nearly triangular • The induced velocity at any radius r is: uH Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 r u H TIP R Thrust in Hover, Triangular Inflow T M (V ) r r dT (2r u H TIP dr )( 2 u H TIP ) R R 3 R r 2 dT 4u H TIP 2 dr 0 R Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Integrating with respect to r and evaluating T R u 2 and u 2 H TIP 2 H TIP T 2 R (17) • Substituting (BR)2 for R2 gives: u H TIP Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 w T where w 2 B R 2 (18) Power in Hover, Triangular Inflow • Expression for ihp based on triangular distribution ihp Tu H 550 1 R r r r ihp (2r u H TIP dr )( 2 u H TIP )( u H TIP ) 550 0 R R R 4 R r 4 ihp u 3HTIP 3 dr 0 R 550 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Relationship of uniform and triangular distributions • Integrating with respect to r and evaluating 1 4 ihp x Tu H TIP 550 5 (19) • The triangular induced velocity distribution may be expressed in terms of uniform distribution using equations (14) and (18) as follows: w u H TIP B 2 2 uH w 2 B 2 u H TIP 1.414u H Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (20) Induced Power Correction • Using Equations (15), (19) and (20) the ratio of ihp for triangular distribution to ihp for uniform induced velocity distribution in hovering is: ihp 1 4 550 ( x T x 1.414u H ) ihp 550 5 Tu H ihp 4 (1.414) 1.13 ihp 5 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (21) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Induced Velocity and Power in Forward Flight • The velocity induced by a rotor in forward flight may be represented by figure below. V Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 V + ui V + 2ui Thrust Calculation The thrust considering uniform velocity distribution T R 2 (V ui )(V 2ui V ) Let V ui V Then T R V 2ui Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 2 ' ' (22) Induced Velocity Calculation • Substituting (BR)2 for R2 gives T ui 2 2 ' 2 R B V (23) • Substituting equation (14) in equation (23) 2 H ' u ui V Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (24) Velocity Impact of Thrust Tilting a’ ui sin a’ V V’ a’ ui ui cos a’ • For triangular induced velocity in forward flight it may be seen from figure above that (V ' ) 2 (V ui sin a ' ) 2 (ui cos a ' ) 2 (V ' ) 2 V 2 2uiV sin a 'ui2 sin 2 a 'ui2 cos 2 a ' (V ' ) 2 V 2 2uiV sin a 'ui2 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (25) The Induced Velocity Correction Factor • Defining the Induced Velocity Factor ui Ku uH Then ui u H K u (26) (27) • Setting equation (27) equal to equation (24) u H2 uH Ku V' Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (28) Calculation of the Correction Factor • Substituting equations (25) and (27) in equation (28) Ku uH (V 2u H K uV sin a 'u K ) 2 2 H 2 u 1 2 2 u 2 h Ku 2 V 2u H K uV sin a 'u H2 K u2 u (V K 2u H V sin a ' K u K ) 2 h V 1 uH Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 2 2 u 2 2 V K u 2 uH 3 u 2 H 4 u sin a ' K u3 K u4 Calculation of the Correction Factor • The Ku3 term for steady level flight is negligible V K uH 4 u 2 2 K u 1 0 (29) • Solving the quadratic equation (29) becomes 1 V K 2 uH 2 u Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 2 1 V 2 uH 4 4 (30) Induced Velocity Factor as a Function of Forward Velocity 1 Induced Velocity Factor Ku 0.8 0.6 0.4 0.2 0 0 2 4 6 V/uH Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 8 10 Induced Horsepower in Forward flight • Considering uniform induced velocity distribution ihp ihp H K u T w ihp Ku 2 550 2 B (31) • As mentioned previously the distribution is more nearly triangular therefore: ihp 1.13 ihp H K u 1.13 w ihp T Ku 2 550 2 B Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (32) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Determination of Rotor Profile Power • From Blade Element Theory 1 dD VR2cdr 2 1 d ( RHP ) VR3cdr 1100 (33) (34) • The resultant velocity on a blade element is: VR r V sin Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (35) Rotor Blade Element Theory Blade element @ Station r=xR Y=0 270° a r + V sin Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Q u + V sina’ Tip Path Plane 90° dr 180° a’ V Determination of Rotor Profile Power • Substituting equation (35) in (34) and expanding: 1 d ( Rhp ) (R V sin )3 cdr (36) 1100 1 c(3 R 3 2 2 R 2V sin RV 2 sin 2 1100 (37) 2 2 2 2 3 3 r V sin 2RV sin V sin )dr • Profile power at any angle, , is r2 Rhp ( ) d ( Rhp ) r1 c r2 1100 r1 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (38) (3r 3 3 2 r 2V sin 3rV 2 sin 2 V 3 sin 3 )dr Determination of Rotor Profile Power • Substituting the identities: sin 2 1 1 cos 2 2 2 sin 3 3 sin 1 sin 3 4 4 • Integrating equation (38): RHP ( ) r2 3r 3 2 2 3 2 2 2 3 r V sin r V r V cos 2 (39) c 4 4 4 1100 3 3 1 3 V r sin V r sin 3 4 r 4 1 4 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Determination of Rotor Profile Power • Substituting the expression V=mWR in equation (39) Rhp ( ) r2 r 3 2 2 2 3 2 2 2 3 r R sin r R r R cos 2 3 c 4 4 4 1100 3 3 3 1 3 3 rR sin rR sin 3 4 r 4 1 4 (41) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Determination of Rotor Profile Power • The average profile power over the entire azimuth considering the reverse flow region is: R b 2 Rhp Rhp ( ) d 0 2 0 R sin b 2 Rhp ( ) d (42) 0 • The limits of r=0 to r=-Rsin is the region of reverse flow and is established by determining the point on the blade radius at any azimuth where the resultant velocity is zero. Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Determination of Rotor Profile Power VR r V sin where V R R 3/2 Therefore VR (r R sin ) Y /2 Y=0 • The radius where VR=0 is locus of reverse flow boundary and occurs only between = and =2 r R sin 0 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Determination of Rotor Profile Power • Introducing the term Kμ and defining it as: 3 4 K 1 3 8 2 • Then Rhp Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (54) A V K 3 B T 4400 (55) Determination of Rotor Profile Power • Defining: b 2 R A1 Rhp ( )0 d 2 0 b 2 R sin A2 Rhp ( )0 d (43) (44) • Then Rhp Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 c3 1100 ( A1 A2 ) (45) Determination of Rotor Profile Power • Substituting equation (41) in (43) and evaluating the limits for r: R4 3 2 4 3 2 4 4 R sin R R cos 2 b 2 4 4 4 A1 d 2 0 3 3 4 1 3 4 4 R sin 4 R sin 3 • Integrating with respect to and evaluating: bR 4 A1 (1 3 2 ) 4 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (46) (47) Determination of Rotor Profile Power • Substituting equation (41) in (43), evaluating the limits for r and combining terms: 3 4 4 3 4 4 4 2 R sin R cos 2 sin 2 b 4 A2 4 d 1 4 R 4 sin 3 sin 4 • Substituting the identities: cos 2 1 2 sin 2 sin 3 3 sin 4 sin 3 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 (49) Determination of Rotor Profile Power b 2 1 4 4 4 A2 R sin d 4 b 4 R 4 2 4 sin d 4 (50) • Integrating with respect to and evaluating 3b R A2 32 4 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 4 (51) Determination of Rotor Profile Power • Combining equations (47) and (51): bR 4 3 2bR 4 3b 4bR 4 A1 A2 4 4 32 bR 4 3 4 2 (1 3 ) 4 8 (52) • The rotor profile power then becomes: c3 bR 4 3 4 Rhp (1 3 ) 1100 4 8 3 ABVT 3 4 2 Rhp (1 3 ) 4400 8 Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 2 (53) General form to include Compounds • Past flight tests have shown a need to account for stalling of the retreating blade. Equation (54) has been modified to read: K 1 3 C4 2 4 (56) • C4 accounts for the stalled region of the blade and varies with mean lift coefficient • For the normal design range of lift coefficient C4 has been set to 30 for pure helicopters and 5 for compound helicopters. Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 Profile Power Factor vs Forward Velocity Profile Power Factor K 1.5 Tip Speed (ft/sec) 600 1.4 650 1.3 700 1.2 1.1 1 0 20 40 60 Forward Velocity (Knots) Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 80 100 Design Problem: VTOL Configuration “Sensitivity” Analysis (Use of Nomographs) • • Consider the requirement for a VTOL aircraft which has the following operational characteristics: Crew (4) @ 200 lbs each 800 lbs Passengers (30 @ 200lbs + 30 lbs gear 6900 lbs Vcruise 250 knots Vrange (275 NM w/30 min reserve@VCr) 400 nm Engine Requirement Multiple Hover Reqts (All engines, 6000’,95oF day) OGE(5min rating) Environmental Conditions Dictate w< 50lbs/ft2 The design issue is – which VTOL concepts are competitors for such a specification? It is immediately evident that the pure helicopter is not a competitor by virture of the cruise requirement. Further, the competitive configurations are: 1. 2. 3. Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150 The Compound Helicopter (Cmpd) The Tilt-Rotor Aircraft (TR) The Tilt-Wing Aircraft (TW) Design Problem: VTOL Configuration “Sensitivity” Analysis (Use of Nomographs) • Depending on the particular manufacturer, or procuring agency, certain a priori knowledge exists regarding the following characteristics of these VTOL configurations: 1. Configuration Informaton: Cmpd TR TW Cruise L/D……………………………………5.0 ηC…………………………………………… 0.84 C (Specific Fuel Consumption @ VCr…… 0.55 Φ (Empty-to-Gross Weight Ratio)………… 0.64 w (Disk Loading)…………………………… 9.0 • 9.00 0.75 0.55 0.70 15.0 10.5 0.80 0.55 0.68 50.0 Student Exercise: Considering these vehicle characteristics and using the design charts provided, Figure A-1 and A-2, compare the different configurations on gross weight and installed power. Which has the lowest gross weight? Which has the highest installed power? Dr. Daniel P. Schrage Georgia Institute of Technology Atlanta, GA 30332-0150