Application of CAS to geodesy
advertisement

Application of CAS to geodesy: a ‘live’ approach
P. Zaletnyik1, B. Paláncz2, J.L. Awange3, E.W. Grafarend4
1,2 Budapest University of Technology and Economics - Hungary
3 Curtin University of Technology - Australia, 4 Stuttgart University - Germany
Live application of CAS
Introduction
Nowadays, computer algebra systems (CAS) offer
the possibility of 'live' interaction to users. This is in
contrast to the widely held believe by most
scientists, even today, that CAS language is a
programming language. CAS can be used like 'live'
mathematics for creating, proving as well as
evaluating algorithms and expressions in numeric or
symbolic form.
Most nonlinear geodetic computational problems,
e.g., finding initial values for iterative algorithms,
avoiding ill-conditioned numerical problems, or
finding effective global or local minimums are
immaterial when CAS is properly employed.
CAS- Computer Algebra System
CAS – Computer Algebra Systems integrate the
modern numeric and symbolic mathematical
algorithms as built-in functions.
Their major advantage over traditional programming
languages that they are interactive. Besides
symbolic and numeric computations, we have also
strong visualization capabilities. For solving
mathematical problems with CAS, we do not need to
study the theory of the algorithms, we just can use
them in a simple way. This simplicity allows us to
concentrate on the essential task and ignore
peripheral matters.
The most frequently used CAS systems are:
Mathematica, Maple, MuPAD and Macsyma. With
these systems, symbolic manipulations can be done
like
symbolic
simplifications,
differentiation,
integration, matrix operations, solution of polynomial
systems of equations, polynomial factorization,
greatest common divisor etc.
Solving polynomial system of
equations
To solve the nonlinear geodetic problems the
Mathematica software can be used effectively.
One powerful tool for these problems is the Dixon
resultant, which is implemented into Mathematica.
To solve the previous threevariate polynomial is
very easy with this CAS system.
The Dixon resultant package has to be loaded:
<<Resultant`Dixon`
Then write the polynomial system directly
p = x2 + y2 – 1; q = x2 + z2 – 1; r = y2 + z2 – 1;
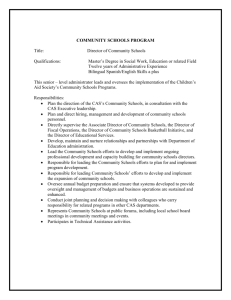
The resultant monomial can be received with
one command (eliminating y, z from the
polynomial system and using , auxiliary
variables)
dr = DixonResultant[{p ,q ,r},{y, z},{, }]
4
6
Figure 1. Solutions of system
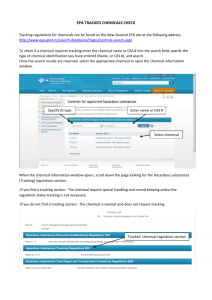
where I3 is a 3x3 identity matrix. The symbolic
result can be obtained using one Mathematica
command (see Figure 3).
Figure 3. Calculating rotation matrix in Mathematica
Nonlinear problems in geodesy Intersection
In intersection method angular observation are
considered from known points to the unknown point.
2
2
2
x 2 x1 S 12 2 x1 S 12 cos( 12)
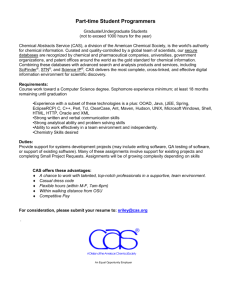
1 8 x 24 x 32 x 16 x 0
2
4
6
The roots of this
monomial are shown
in Figure 2.
8
Figure 2. The x oordinates of
the solution
Figure 5. Point positioning
using Global Navigation
Satellite System
3D Helmert and affine transformation
The 3D Helmert transformation uses three
translation parameters (X0,Y0,Z0), three rotation
parameters (a, b,c) in the R rotation matrix (see
Fig. 3) and a scale parameter (s) to transform one
set of coordinates in a given system into another
coordinate system.
The 9-parameter affine transformation is the
generalization of
the 7-parameter similarity
transformation model, where 3 different scales
represented by a diagonal scale-matrix are used
instead of one scale factor.
For the determination of the 7 or 9 parameters of
the transformation we need at least 3 points with
known coordinates in both coordinate systems.
The 3D Helmert transformation can be solved
symbolically using Dixon resultant and selecting 7
equations from the 9 equation which belongs to the
3 known points. In case of affine transformation a
semi-symbolic solution can be given which can
provide reduction in computing time comparing
with numerical solution.
Conclusion
2
2
2
x1 x3 S 31 2 x3 S 31 cos( 31)
(1 2 x )
2
Employing Dixon resultant one can get three
linear equations for variables {x1, x2, x3} with
parameter x4 eliminating the other two variables.
Substituting these results into the last nonlinear
equation (f4), then we get a quadratic equation
for x4, which can be solved easily.
8
The advantage of using a CAS system is evident
not only for solving this problem, but for solving for
example matrix calculations symbolically which are
also very frequent in geodesy. For example in the
coordinate transformation problem (which we will
examine later) the rotation matrix (R) need to be
calculated with the skew-symmetric matrix (S). To
calculate R symbolic matrix operations are needed
such as extraction, multiplication and inverse
determination.
0 c b
S c
0 a ; R ( I 3 S ) 1 ( I 3 S )
b a a
2
2
x3 x 2 S 23 2 x 2 S 23 cos( 23)
2 4
2
Solve[dr ==0,x]//Union
1
1
{x
,x
}
2
2
2
The received monomial:
2
f i ( x1 ai) ( x2 bi) ( x3 ci) ( x4 d i)
And finally the solutions are
Let us solve the next threevariate polynomial
system, by eliminating two variables (y, z) from
the equations).
( h) y 2 z 2 1 0
The distance of the receiver from i-th satellite is
related to the unknown position of the receiver (x1,
x2, x3) and the receiver clock bias (x4). For i=1…4:
dr 1 8 x 24 x 32 x 16 x
2
The basic concept of the solution of a multivariate
nonlinear system of polynomial equations, when the
number of equations (n) is equal to the number of
variables (m), is to reduce the number of the
variables from m to 1. After this reduction, the
received monomial can be solved easily mostly
numerically.
( g ) x2 z 2 1 0
Another tipically nonlinear problem which can be
solved symbolically with CAS is position
determination using Global Positioning System.
2
Solution of nonlinear systems of equations is an
indispensable task in all geosciences.
( f ) x2 y 2 1 0
Nonlinear problems in geodesy
Ranging by GPS
Figure 4. 3D intersection
Arranging the
equations to zero and
eliminating x2, x3 with
Dixon resultant (as in
the previous section)
we get a monomial for
x1 which can be solved
numerically.
Variable x2, x3 can be
determinded similarly.
CAS proved to be a very effective, user friendly tool
for solving nonlinear geodetic problems, like ranging
with GPS, intersection, 3D Helmert and affine
transformations.
The user can formulate his or her problems
interactively, in the usual mathematical way and
solve them with transparent built-in functions
implemented on the bases of algorithms
representing the state of art of mathematics without
programming knowledge.
Contact: Piroska Zaletnyik
Email: piri@agt.bme.hu
Acknowledgements
The first author wishes to thank to the Hungarian
Eötvös Fellowship for supporting her visit at the
Department of Geodesy and Geoinformatics of the
University of Stuttgart (Germany) where this work
has been accomplished.