A UNIQUE DESIGN FOR A DESKTOP MILLING MACHINE
A Thesis
Presented to the faculty of the Department of Mechanical Engineering
California State University, Sacramento
Submitted in partial satisfaction of
the requirements for the degree of
MASTER OF SCIENCE
in
Mechanical Engineering
by
Kevin Mark Noonan
FALL
2012
© 2012
Kevin Mark Noonan
ALL RIGHTS RESERVED
ii
A UNIQUE DESIGN FOR A DESKTOP MILLING MACHINE
A Thesis
by
Kevin Mark Noonan
Approved by:
__________________________________, Committee Chair
Dr. Akihiko Kumagai
__________________________________, Second Reader
Dr. Tien-I (Tom) Liu
____________________________
Date
iii
Student: Kevin Mark Noonan
I certify that this student has met the requirements for format contained in the University
format manual, and that this thesis is suitable for shelving in the Library and credit is to
be awarded for the thesis.
__________________________, Graduate Coordinator
Dr. Akihko Kumagai
Department of Mechanical Engineering
iv
___________________
Date
Abstract
of
A UNIQUE DESIGN FOR A DESKTOP MILLING MACHINE
by
Kevin Mark Noonan
A light duty, desktop size, 3 axis CNC milling machine is designed with a frame
featuring a novel welded steel design composed entirely of precision cut plate steel
featuring interlocking and self aligning geometry. The wide availability of high accuracy
cutting of sheet and plate materials by laser and abrasive waterjet cutting has made
possible the idea of a structure composed entirely of precision cut plate. Interlocking
features are used at the joints between each piece which when considered in a three
dimensional structure causes the assembly to be inherently self aligning and requires no
assembly fixturing.
The design concept is intended to reduce or eliminate machining of the finished
steel structure. Three dimensional parametric modeling and finite element analysis
simulations will be used to design the assembly and make worst case deflection
predictions. A prototype machine structure is fabricated and evaluated to determine if the
design is a viable alternative to more traditional machine designs
_______________________, Committee Chair
Dr. Akihiko Kumagai
_______________________
Date
v
ACKNOWLEDGEMENTS
To Jennifer for your patience during the long hours spent on this project and for your
encouragement to peruse my goals.
To my parents for your limitless support.
vi
TABLE OF CONTENTS
Page
Acknowledgements ...................................................................................................................vi
List of Tables ............................................................................................................................ix
List of Figures ............................................................................................................................ x
Chapter
1. INTRODUCTION ................................................................................................................ 1
The Milling Machine and CNC Technology .................................................................. 1
Problem Description ....................................................................................................... 3
Significance of Problem .................................................................................................. 3
Scope of Study ................................................................................................................ 4
Organization of Project ................................................................................................... 5
2. LITERATURE RESEARCH ................................................................................................. 6
Existing Products and Benchmarking Analysis .............................................................. 6
Machine Tool Design ...................................................................................................... 8
3. DESIGN ............................................................................................................................... 11
Primary Design Evolution ............................................................................................. 11
Requirements ................................................................................................................ 18
Design Methodology & 3D modeling ........................................................................... 22
vii
Design for Manufacturing and Assembly (DFMA) ...................................................... 24
Component Selection & Machine Assembly ................................................................ 25
4. ANALYSIS AND TESTING .............................................................................................. 32
Evaluation of Cutting Technologies ............................................................................. 32
Finite Element Analysis ................................................................................................ 34
Prototype Milling Machine Analysis ............................................................................ 34
Static Load Test Article ................................................................................................ 36
5. PROTOTYPE MACHINE FABRICATION AND ASSEMBLY ....................................... 40
Component Fabrication ................................................................................................. 40
Assembly Process ......................................................................................................... 41
Measurement of Geometric Error ................................................................................. 43
6. RESULTS AND CONCLUSION ........................................................................................ 45
Conclusions ................................................................................................................... 45
Future Considerations ................................................................................................... 45
Appendix A. Benchmarking Analysis ..................................................................................... 47
Appendix B. Selected Drawings .............................................................................................. 48
Works Cited ............................................................................................................................. 77
viii
LIST OF TABLES
Tables
Page
1.
Table 1. Benchmarking Analysis (selected criteria) ...................................................... 7
2.
Table 2. Functional Requirements ............................................................................... 19
3.
Table 3. Derived Requirements ................................................................................... 19
4.
Table 4. Constants and sources for end milling power and force calculation ............. 20
5.
Table 5. Constants and sources for drilling power and thrust calculation ................... 21
6.
Table 6. Constants and sources motor size calculation ............................................... 29
7.
Table 7. FEA Deflection Results with Different Mesh Techniques ............................ 37
ix
LIST OF FIGURES
Figures
Page
1.
Figure 1. Manual vertical milling machine.................................................................... 2
2.
Figure 2. Load path diagram for a horizontal spindle machine [5] ............................... 9
3.
Figure 3. Finger joint ................................................................................................... 12
4.
Figure 4. Tab and slot joint ......................................................................................... 13
5.
Figure 5. Half lap joint (shown separated) .................................................................. 14
6.
Figure 6. 3D Model of the Frame for the Proposed Machine Design ......................... 15
7.
Figure 7. Bottom view of the milling machine showing the ribbed design ................. 16
8.
Figure 8. Z-Axis frame assembly ................................................................................ 17
9.
Figure 9. Packaging of X axis components ................................................................. 23
10.
Figure 10. Illustration of ball screw and ball nut ......................................................... 28
11.
Figure 11. Design model for the prototype milling machine....................................... 31
12.
Figure 12. Laser cut (left) and waterjet cut (right) sample parts ................................. 33
13.
Figure 13. Deformation Plot for FEA due to maximum tangential forces .................. 35
14.
Figure 14. Comparison of Meshes used for FEA for bridge test predictions .............. 36
15.
Figure 15. Test article installed in load frame ............................................................. 38
16.
Figure 16. Prototype Machine Bridge Deflection Test Data and FEA Predication ..... 39
x
17.
Figure 17. Laser cut parts for the prototype milling machine ..................................... 40
18.
Figure 18. Assembly fit check and 3D model of frame components .......................... 41
19.
Figure 19. Prototype milling machine frame during assembly .................................... 42
20.
Figure 20. Prototype Milling Machine Assembly ....................................................... 43
21.
Figure 21. Plot of frame flatness vs. distance at the rail mounting surfaces ............... 44
xi
1
Chapter 1. INTRODUCTION
Manufacturing technology and specifically machine tools are used to create the products
and goods on which modern economies are based. Over time, different types of machines with
different purposes were developed; in 1818, during the industrial revolution, Eli Whitney is
credited with building the first milling machine [1]. Since that time, the milling machine has
been constantly improved and with the application of CNC technology; it is arguably the most
versatile machine tool available today. Part of the evolution of the milling machine has been the
miniaturization of the technology. The miniaturization of the CNC milling machine has reached
a point where a machine can be placed on a desktop enabling low cost machines to become
widely available to educators, inventors, and hobbyists.
The Milling Machine and CNC Technology
A milling machine is a type of machine tool defined by a rotating tool with cutting
edges which is used to mechanically remove material, in the form of chips, from a workpiece
though relative motion between the rotating cutting tool and the workpiece. Unlike drilling, the
milling process is capable of relative motion between the rotating tool and the workpiece in
directions other than the axis of tool rotation. A large variety of milling machine configurations
and sizes have been developed and are usually distinguished by the orientation of the cutting
tool, the number of linear and/or rotational motion axes, and the working volume of the machine
[2]. Figure 1 shows an illustration of a manual, vertical spindle, milling machine.
2
Figure 1. Manual vertical milling machine
A Computer Numerical Control (CNC) machine tool is a machine tool that uses a set of
instructions to automatically position the cutting tool relative to the workpiece. A computer reads
instructions from a data file and sends motion commands to motors, which control the position of
each axis. Numerical control of a machine tool was first demonstrated at the Massachusetts
Institute of Technology in 1952 and the technology first became commercially available in 1955.
Since that time, numerical control technology has been continuously refined to keep pace with
advances in computing technology [3]. Today a number of different CNC control options have
become commercially available including low cost software that can turn a common PC into a
3
multi-axis motion controller. The emergence of PC control of machine tools has enabled the
development of small, low cost, CNC machine tool products including desktop size CNC milling
machines.
Problem Description
A review of commercially available desktop size CNC milling machines reveals the
potential for an improved design featuring a welded steel frame which may be cost competitive
and offer performance advantages. Inexpensive desktop CNC milling machines have designs
featuring lightweight aluminum structures or are based on small cast-iron manual milling
machines with CNC conversions. In an attempt to fill the perceived gap, a new design for a
desktop CNC milling machine is proposed featuring a low cost, modular, approach to the design
of the primary structure. The proposed machine structure design is based on two dimensional,
plate steel components with interlocking joinery. Current generation commercially available
two-dimensional CNC cutting technologies such as laser, abrasive waterjet, and plasma cutting
are relatively low cost and can produce complex planar geometry in one manufacturing
operation. The proposed machine design leverages high accuracy two-dimensional cutting
processes to determine if a desktop CNC milling machine designed around this concept is viable.
Significance of Problem
Desktop size CNC milling machines are almost exclusively used in non-production
environments such as offices, classroom, or garages. Larger and more efficient machining
centers are typically used for production manufacturing. A desktop machine would likely be used
for prototyping, education, or making one-off parts. Independent of the usage, lowering the cost
of advanced manufacturing technologies and making those technologies available to a wider
audience is significant to promoting economic growth.
4
Scope of Study
The complete design of a complex electro-mechanical product with numerous parts such
as a CNC milling machine is a considerable undertaking and as such, the scope of this research
had to be limited. The primary research conducted is regarding a unique approach to the design
of the structural elements and therefore a number of aspects not explicitly related to the structural
elements have been simplified or removed from the scope of the project.
Literature research into milling machine design and existing desktop CNC machines was
conducted. Product design requirements are defined largely based on a benchmarking analysis
of the specifications of similar sized commercially available three-axis CNC milling machines.
The machine design features a vertical spindle and three orthogonal axes of motion with a fixedbridge configuration. This configuration was selected to minimize the mass driven by the servo
motors and its compact overall footprint.
A detailed design model was created with Pro/Engineer parametric computer aided
design (CAD) software. The design model includes all components of the milling machine;
significant detail is required for design modeling to correctly asses the packaging of the system
and masses for the moving components. Static structural finite element analysis (FEA) is
conducted for milling machine frame. Thermal and dynamic simulations are not conducted; this
is not because these simulations are unimportant, rather, it is because thermal and dynamic
simulations require extensive system modeling, including characterization of heat sources, joint
stiffness, damping, and the performance of the positioning system all of which are considered
beyond the scope of this research.
To validate the results of the structural model, a partial frame assembly, consisting of the
bridge structure, was fabricated and subjected to static load testing. A full-scale prototype
5
assembly is fabricated to test the practicality and efficiency of assembling the structure as well as
resulting dimensional characteristics. The accuracy of the complete system including servo
positioning accuracy is not assessed. Some components, such as way covers, have been designed
but were not included as part of the prototype assembly due time and budget limitations; these
components are included in the CAD model to verify packaging of the system but the physical
parts are not necessary to complete the research objectives.
Organization of Project
The project is organized into two phases: 1) research, design and analysis, and 2)
fabrication and test. The design and analysis phase of the project consists of literature research
into milling machine design and construction, three dimensional CAD modeling of the complete
milling machine assembly, finite element analysis of the structural elements, and preparation of
engineering drawings for the prototype hardware. At the conclusion of the design and analysis
phase of the project, enough confidence in the design had been accumulated to start fabrication.
The fabrication and test phase of the project includes the procurement and manufacturing of
components followed by assembly and testing. Quantitative and qualitative testing is completed
to determine if the design concept is viable.
Project management tool Microsoft Project was used to identify and track key tasks
against project milestones; other project management tools used included a manufacturing and
assembly plan, tool list, and Bill of Materials.
6
Chapter 2. LITERATURE RESEARCH
Existing Products and Benchmarking Analysis
Commercially available desktop size milling machines were researched to investigate the
features, capabilities, and cost of desktop milling machines currently in the marketplace.
“Desktop” is a somewhat ambiguous classification that, in the context of this thesis, is taken to
mean a machine which is not freestanding, must fit onto heavy duty desk or workbench, and
must be moveable without highly specialized lifting and transportation equipment. “Benchtop”
machines have a perception of being larger and heavier than desktop machines but for the
purposes of this thesis no differentiation is made between desktop or benchtop machines.
None of the machines identified for the benchmarking analysis are produced by the
large, well known, companies in the machine tool industry. It is assumed that these large
companies do not produce machines in this market segment due to a combination of low
demand, low profit margins, and low efficiencies associated with of small inexpensive machines.
One possible exception was the Office Mill manufactured by Haas Automation Incorporated of
Oxnard California. The Office Mill is a professional quality machining center designed to be
rolled through a standard doorway. The features found on this machine including an automatic
tool changer and 30,000 rpm spindle and a high end price point; these features made it obvious
that the Office Mill is not a competitor with the machines identified in the benchmarking
analysis [4].
Six machines were selected for the benchmarking analysis. The specifications and
construction of these machines were tabulated to evaluate their differences. A summary of the
most significant features is shown in Table 1. The complete benchmarking analysis can be found
in Appendix A.
7
Table 1. Benchmarking Analysis (selected criteria)
Manual
Conv.
Travel
Machine
Price
DMC-III
$ 8,500
No
Fixed Bridge
12.0
8.0
6.0
Cast Iron
MDX-540
$ 31,000
No
Fixed Bridge
19.6
15.7
6.1
Steel
CNC Express
$ 6,000
Yes
Round Column
17.0
7.0
5.0
Cast Iron
Motion
Support
Linear
Guide Rail
Linear
Guide Rail
Dove Tail
Ways
Desktop Mill
$ 3,500
No
Square Column
9.0
5.0
6.5
Aluminum
Ways
PCNC770
$ 6,800
Yes
Square Column
14.0
7.5
13.3
Cast Iron
CNC3040Z+S
$ 1,200
No
Moving Gantry
16.1
11.0
3.0
Aluminum
Ways
Cylindical
Shaf Rail
Design
X
Y
Z
Construction
Weight
(lb)
260
225
700
100
(est.)
660
96.8
The most inexpensive machine in the benchmarking analysis, the Carving-CNC
CNC3040Z+S, featured a base manufactured from aluminum extrusions and unsupported linear
guideways made from cylindrical shafting supported at each end. The lightweight structural
components and end-supported linear rails will contribute to a low static stiffness, small load
capacity, and decreased accuracy.
Some of the machines reviewed were CNC conversions of small mass produced manual
milling machines such as the MicroKinetics CNC Express. The converted machines generally
feature cast iron components selected for good damping and low production cost. It may appear
that the converted machines have an advantage in terms of rigidity but because these machines
were not intended to be computer controlled many parts such as leadscrews must be upgraded by
the manufacturer.
Evaluating the benchmarking analysis, a potential gap was observed between the lowest
cost, most lightweight, machines and the moderately priced machines of cast iron construction.
The desktop milling machine design proposed in this thesis is intended demonstrate a unique
design that has the potential to fill the perceived gap.
8
Machine Tool Design
The design of any machine tool is driven by the need to consistently meet a set of
specified requirements for a finished workpiece including tolerances of size, tolerances of
location, and surface finish. The workpiece requirements must be satisfied while minimizing the
effect of outside disturbances and must be done in an efficient manner to sustain the economic
considerations of operating the machine. From the size, feature geometry, accuracy, and
productivity requirements of the workpiece, the machine size, motions, accuracy, deformation
characteristics, and operational speeds can be derived [5].
Often machine tools marketed commercially at a broad audience rather than designed to
meet the requirements of a specific workpiece. In that case, the overall machine size, motions,
and accuracy are specified such that the machine will be useful for a certain range of workpieces
and it is up to the customer to choose the machinery which best fits his or her needs.
Once the size, axes of motion and configuration of the machine elements has been
determined the structural elements must be designed. The structural elements of the machine tool
are used to house or connect all components of the machine tool and create a load path for the
reaction of forces within the machine (Figure 2). The primary forces which must be reacted by
the structural elements of the machine tool are: the mass of the machine elements, the mass of
the workpiece, inertial forces, friction forces, and forces due to the cutting action [5]. In the case
of a very small machine such as a desktop milling machine, the mass of the machine and the
mass of the workpiece are small and do not drive significant stresses or deformations.
The static stiffness and dynamic response of the machine tool are the most critical
parameters in determining the accuracy and surface finishes which can be obtained. The static
9
stiffness (Equation 1) of a machine tool is the relationship between the applied load and the
resulting deformation in the machine tool structure.
𝑆𝑡𝑎𝑡𝑖𝑐 𝑆𝑡𝑖𝑓𝑓𝑛𝑒𝑠𝑠 = 𝑘 =
𝐹
𝑥
(1)
In machine tool design, the design of the structural elements is driven by minimizing
deformation, and therefore geometric error on the workpiece, rather than material stress limits.
The goal of minimizing deflection drives relatively thick sections and therefore generally low
stresses.
Figure 2. Load path diagram for a horizontal spindle machine [5]
The dynamic characteristics of a machine concern how the machine responds to
vibratory load weather external or self-excited. The dynamic response of the machine tool will
be most noticeable in the surface finish of the workpiece. The most important factors in
10
determining how a machine tool will respond to the dynamic input are the mass of the machine,
the distribution of the mass within the machine, and the natural frequency of the machine
(Equation 2) [5].
𝑘
𝑁𝑎𝑡𝑢𝑟𝑎𝑙 𝐹𝑟𝑒𝑞𝑢𝑒𝑛𝑐𝑦 = 𝜔 = √
𝑚
(2)
The material selected for the machine tool frame and the vibration damping properties can
have a large overall effect on the natural frequency of the machine tool. Cast iron has better
damping properties that steel which is one of the key reasons for its widespread use in the
structures of machine tools. However, Weck states, “Whilst the damping properties of cast iron
are higher than for steel, the damping effect at the welded joints of fabricated constructions
generally compensates for this disadvantage [6].”
Many other considerations are part of machine tool design besides the structural response of
the machine frame. An incomplete list of these other considerations includes accessibility,
ergonomics, manufacturability, wear, maintainability, safety, and economics [5]. Accessibility is
the ability of the operator to load and unload work as well and cutting tools. Ergonomic
considerations include strain on the operators’ body during setup and operation of the machine
tool. Maintainability concerns the ability to perform required maintenance and accessibility to
the parts that require regular maintenance or replacement. Machine tools usually contain, moving
masses, sharp cutters, and electrical circuits; therefor, safety of the operator must be a critical
design consideration. As with any product design the economics of sales volume, profit margin,
and manufacturing cost must all be considered and can have impacts on the material, methods,
and components selected by the designer.
11
Chapter 3. DESIGN
Primary Design Evolution
A three axis desktop CNC milling machine is proposed to fill the perceived gap in the
benchmarking analysis. The major evolution will be in the machine structure which will utilize a
welded steel design composed entirely of precision cut plate featuring interlocking and selfaligning geometry. The use of interlocking joint geometry, sometimes referred to as ‘tab and
slot’ joinery, is commonplace in many metal fabrication shops but is generally not referenced in
engineering literature. Specific improvements to geometry and applications of such joints in
specific products such as automobiles have been patented [7] [8] [9]. To execute a design based
on sheet steel components, a number of different joint designs are used in the proposed milling
machine frame including finger, tab and slot, and lap joints.
The ‘finger joint,’ shown in Figure 3, is defined by alternating protrusions which are
manufactured on the ends two parts such that the protrusions fit together in an overlapping
nature. This joint type can be used to join parts which are coplanar or oriented at an angle. In the
proposed design for the milling machine, finger joints are used exclusively to join external ninety
degree corners between adjacent parts. By adding a chamfer to an inside edge on the protrusions
a bevel groove weld joint can be integrated.
12
Figure 3. Finger joint
Figure 4 shows a ‘tab-and-slot joint. This joint is created by making a slot in one part
and a matching protrusion on a second part. The protrusion is designed to fit tightly into the slot.
Adding a shoulder on the part, which has the protrusion, limits the engagement of the protrusion
into the slot and, if significantly large, the shoulder can provide angular (often perpendicular)
alignment. The surfaces of the protrusion and slot generally do not provide good angular
alignment since they are typically small in length when compared to the overall length of the
parts. As with the finger joint, the tab and slot joint can be designed to integrate a weld pocket. If
the tab is shorter that the thickness of the material which is slotted a pocket will be created with
can be filled with weld material to create a plug weld. It is beneficial to incorporate pockets of
this nature to reduce the weld penetration required and therefor reduce the magnitude of the heat
input during the welding process [6]. Tab and slot joints are used throughout the proposed
milling machine design where parts intersect at perpendicular joints but away from the edges of
the components.
13
Figure 4. Tab and slot joint
A ‘lap joint’ is used to allow two intersecting members to cross each other at the same
elevation without the need to fully sever one of the two members. To create the joint a slot is
made in both members and the parts are assembled by inserting the two slots into each other.
Figure 5 shows an image of a half lap joint; the half lap name implies that the slot depth is equal
in both members. The proposed milling machine design makes use of half lap joints in the base
where the longitudinal and transvers ribs cross. Utilizing the half lap joint allows for fewer parts
since each of the ribs are continuous pieces.
14
Figure 5. Half lap joint (shown separated)
Care has been taken during the detailed design of each part to ensure that as many
features as possible are orthogonally projected onto the plate material; this results in parts which
can be finished in one manufacturing operation. Limiting the structural frame design to
components manufactured from plate steel increases the total part count when compared to
casting or other manufacturing techniques where protrusions can be integrated into a single part.
Increasing the number of parts is contrary to cost reducing concepts outlined in design for
manufacturing and assembly (DFMA) theory [10]. In this case, the potential increase in cost due
to having more parts is offset by the low cost of the individual parts and self-alignment the
components eliminating the need for specialized assembly tooling and fixtures.
As a byproduct of the interlocking joint assembly design concept, the machine design is
inherently modular or flexible. For example: if a machine variation is desired with a lengthened
Y-axis, very few components of the frame structure are affected. By substituting a few of the
plate steel components with longer variants, the machine bed can easily be lengthened. Since the
15
design concept does not require any special tooling the longer components could be easily
assembled with the existing columns and bridge components.
The thickness of the material used in the design of the milling machine frame was
qualitatively selected rather that optimized via analysis. Quarter inch steel plate was selected for
its wide availability and because distortion of the material, weather inherent in the stock or due
to applied forces or heat, should be less than thinner materials.
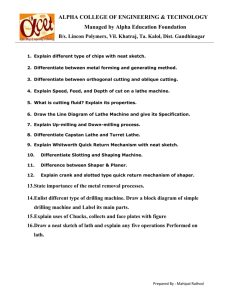
Figure 6. 3D Model of the Frame for the Proposed Machine Design
Figure 6 shows an image of the 3D model of the frame for the proposed machine design.
The interlocking joints can easily be seen at the intersections of the frame components. Joints are
integrated at nearly every intersection between adjoining plates. In an attempt to keep the
machine mass down, the bed has been designed with a series of intersecting ribs; the ribs feature
half-lap joints and two ribs run directly underneath the Y-axis liner rails for maximum stiffness.
Figure 7 shows the underside of the machine frame. Internal ribs have also been integrated into
16
the bridge structure to increase stiffness. Lightening holes are another visually apparent feature,
which have been added where they will be hidden from the exterior appearance of the machine.
Figure 7. Bottom view of the milling machine showing the ribbed design
The same principals and joinery used in the machine frame design are also employed in
the Z-axis frame assembly. Figure 8 shows the 3D model of the Z-axis frame. As with the
machine frame, internal ribbing is used to enhance the rigidity of the weldment.
17
\
Figure 8. Z-Axis frame assembly
One area of concern regarding the machine frame design is potential distortion of the
frame assembly due to the thermal input provided during the electric arc welding process. The
heat input into the weld and the adjacent base metal could have a tendency to drive deformations
in two modes.
The mode of highest concern is shrinkage of the weld caused by the coefficient of
thermal expansion (CTE) as the weld cools. It is postulated that if all the components of the
frame are assembled using only a minimum amount of welding until all components are in place,
the machine will be constrained by all the interlocking joints such that the shrinkage driven
distortion will be minimized. Weld joint design considerations and careful selection of welding
position, angles, and heat input can also help mitigate this issue. For this reason, bevel groove
and plug weld joints have been used rather than fillet welds.
18
The second mode is by creating or relaxing internal stresses in the plate steel
components in the areas adjacent to the welds. Large machine tool structures which employ
welded steel frames are stress relieved and final machined to overcome this source of distortion
[11]. In the case of the proposed machine design the desire to drive down cost outweighs the
advantages of annealing and final machining the completed frame assembly.
Requirements
The traditional design process would use tools such as Quality Function Deployment
(QFD) to organize and weight customer needs to determine a set of functional requirements [12].
For this research, the machine is intended to test a new construction method therefore, many
functional requirements are arbitrarily selected based primarily on the capabilities of the
similarly sized milling machines reviewed in the benchmarking analysis.
The requirements are broken down into two categories: functional requirements and
derived requirements. Functional requirements are applicable to the completed milling machine
assembly. To be a valid requirement, each requirement should be understandable, necessary, and
verifiable on the finished machine [13]. From the functional requirements, a set of derived
requirements is obtained. The derived requirements are necessary to complete the design of the
machine but are not necessarily measureable at the completed machine level. As an example:
functional requirements for workpiece material and material removal rate can be assessed to
determine a derived requirement for required spindle horsepower.
A list of functional requirements applicable to the prototype milling machine design is
shown in Table 2
19
Table 2. Functional Requirements
Requirement
1. Machine Configuration
3. X Axis Travel
Value
Vertical Spindle, Fixed Bridge, 3
linear axes
Welded Steel composted of 2D
CNC cut components, no final
machining of assembly
10 inches minimum
4. Y Axis Travel
12 inches minimum
1. Z Axis Travel
6 inches minimum
2. Workpiece Material
Aluminum and Plastics
3. Workpiece Weight
50 lb maximum
4. Material Removal Rate
2 in3/min maximum
8. Acceleration
9. Position Error (unloaded)
0.1 g maximum
.002 in for ½ travel of each axis
10. Position Error (loaded)
.005 in for ½ travel of each axis
11. Weight
12. Electrical
13. Control System
14. Max End Mill Diameter
350 lb maximum
110/220V, 1 phase
PC based Step/Direction
.500 in
15. Maximum Drill Diameter
.500 in
2. Frame Construction
Selection Criteria
Arbitrarily Selected to limit project
scope
Thesis investigation
Selected to limit machine size and
cost
Selected to limit machine size and
cost
Selected to limit machine size and
cost
Selected to limit machine size and
cost
Limited by material and machining
volume
Selected to limit machine size and
cost
Benchmarking Analysis
Selected to limit machine size and
cost
Selected to limit machine size and
cost
Desktop/Benchtop installation
Required for typical home use
Selected to limit cost
Selected to limit machine size and
cost
Selected to limit machine size and
cost
A list of derived requirements applicable to the prototype milling machine design is
shown in Table 3.
Table 3. Derived Requirements
Requirement
16. Spindle Motor Horsepower
17. Backlash
18. Bridge Deflection
19. X Axis Straightness
20. Y Axis Straightness &
Perpendicularity to table
21. Z Axis Straightness &
Perpendicularity to table
Value
2 hp minimum
.001 maximum
.002 maximum
.003 maximum over full travel
.003 maximum over full travel
Selection Criteria
See power calculation below
Allocated from Requirement 9
Allocated from Requirement 10
Allocated from Requirement 9
Allocated from Requirement 9
.003 maximum over full travel
Allocated from Requirement 9
Spindle horsepower and the resultant cutting forces for end milling and drilling
operations were calculated using the empirical formulas specified in the Tool and Manufacturing
20
Engineers Handbook [2]. The detail calculations are shown in Equation 3 through 14 with
constants and their sources shown in Table 4 and Table 5. The maximum power required is 1.34
horsepower; because this value is based on empirical calculations a safety factor of 1.25 is
applied and considering the typical motor efficiency of approximately 80% a motor not less than
two horsepower is specified as a derived requirement.
Table 4. Constants and sources for end milling power and force calculation
Symbol
Units
3
Description
Value
Source
Q
in /min
Material Removal Rate
2.0
Functional Requirement 8
d
in
Cutter Diameter
0.5
Functional Requirement 14
N
teeth
Number of Teeth
4
Qualitative Selected Process Variable
T
teeth
Number of Teeth Engaged in Work
2
T = N/2 for full slot
-1
RPM
min
Spindle Angular Velocity
4000
TMEHv1* Table 10-8 (Aluminum, d=.5)
fpt
in
Feed per Tooth
0.001
TMEHv1* Table 10-8 (Aluminum, d=.5)
K
-
Material Machinability Factor
0.67
TMEHv1* Table 10-4 (Aluminum)
r
-
Machining Exponent
0.94
TMEHv1* Table 10-4 (Aluminum)
*Tool and Manufacturing Engineers Handbook, Volume 1
𝐶𝑢𝑡𝑡𝑒𝑟 𝑆𝑢𝑟𝑓𝑎𝑐𝑒 𝑆𝑝𝑒𝑒𝑑 = 𝑆 =
𝜋 ∙ 𝑑 ∙ 𝑅𝑃𝑀 𝜋 ∙ 0.5 ∙ 4000
𝑓𝑡
=
= 523.6
12
12
𝑚𝑖𝑛
𝐹𝑒𝑒𝑑 𝑝𝑒𝑟 𝑅𝑒𝑣𝑜𝑙𝑢𝑡𝑖𝑜𝑛 = 𝑖𝑝𝑟 = 𝑓𝑝𝑡 ∙ 𝑁 = 0.001 ∙ 4 = 0.004𝑖𝑛
𝐹𝑒𝑒𝑑 𝑝𝑒𝑟 𝑀𝑖𝑛𝑢𝑡𝑒 = 𝑖𝑝𝑚 = 𝑖𝑝𝑟 ∙ 𝑅𝑃𝑀 = 0.004 ∙ 4000 = 16
𝐷𝑂𝐶 = 𝐷𝑒𝑝𝑡ℎ 𝑜𝑓 𝐶𝑢𝑡 =
𝑖𝑛
𝑚𝑖𝑛
𝑄
2
=
= 0.25𝑖𝑛
𝑑 ∙ 𝑖𝑝𝑚 0.5 ∙ 16
𝐶𝑟𝑜𝑠𝑠-𝑆𝑒𝑐𝑡𝑖𝑜𝑛 𝑟𝑒𝑚𝑜𝑣𝑒𝑑 𝑝𝑒𝑟 𝑡𝑜𝑜𝑡ℎ = 𝐴 = 𝑓𝑡𝑝 ∙ 𝐷𝑂𝐶 = 0.001 ∙ 0.25 = .00025𝑖𝑛2
(3)
(4)
(5)
(6)
(7)
𝐻𝑜𝑟𝑠𝑒𝑝𝑜𝑤𝑒𝑟 = 𝑃 = 𝐾 ∙ 𝑆 ∙ 𝑇 ∙ [0.00549(1000 ∙ 𝐴)𝑟 ]
= 0.67 ∙ 523.6 ∙ 2[. 00549(1000 ∙ 0.0025)0.94 ]
(8)
= 1.047ℎ𝑝
𝑇𝑜𝑟𝑞𝑢𝑒 = 𝑇 =
ℎ𝑝 ∙ 63,025
= 16.5 𝑖𝑛-𝑙𝑏𝑓
𝑅𝑃𝑀
(9)
21
𝑇𝑎𝑛𝑔𝑒𝑛𝑡𝑎𝑙 𝐹𝑜𝑟𝑐𝑒 = 𝐹𝑡 =
126,000 ∙ ℎ𝑝
= 65.9𝑙𝑏𝑓
𝑑 ∙ 𝑅𝑃𝑀
(10)
Table 5. Constants and sources for drilling power and thrust calculation
Symbol
Units
Description
Value
Source
d
in
Drill Diameter
0.5
Function Requirement 15
K
-
Work-Material Constant
7,000
TMEHv1* Table 9-14 (Aluminum)
f
in
Drill Feed per Revolution
0.005
TMEHv1* Table 9-20 (Aluminum, d=.5)
A
-
Drill Design Constant
1.085
TMEHv1* Table 9-15 (c/d=0.18)
B
-
Drill Design Constant
1.355
TMEHv1* Table 9-15 (c/d=0.18)
E
-
Drill Design Constant
0.030
TMEHv1* Table 9-15 (c/d=0.18)
S
ft/min
Surface Speed
350
TMEHv1* Table 9-20 (Aluminum)
*Tool and Manufacturing Engineers Handbook, Volume 1
𝑆𝑝𝑖𝑛𝑑𝑙𝑒 𝑆𝑝𝑒𝑒𝑑 = 𝑅𝑃𝑀 =
3.82 ∙ 𝑆 3.82 ∙ 350
=
= 2,674 𝑅𝑃𝑀
𝑑
0.5
𝑇ℎ𝑟𝑢𝑠𝑡 𝐹𝑜𝑟𝑐𝑒 = 𝑇 = 2 ∙ 𝐾 ∙ 𝑓 0.8 ∙ 𝑑 0.8 ∙ 𝐵 + 𝐾 ∙ 𝑑 2 ∙ 𝐸
= 2 ∙ 7000 ∙ 0.0050.8 ∙ 0.50.8 ∙ 1.355 + 7000 ∙ 0.52 ∙ 0.030 = 209.6𝑙𝑏𝑓
𝑇𝑜𝑟𝑞𝑢𝑒 = 𝑀 = 𝐾 ∙ 𝑓 0.8 ∙ 𝑑1.8 ∙ 𝐴 = 7000 ∙ 0.0050.8 ∙ 0.51.8 ∙ 1.085 = 31.5𝑖𝑛-𝑙𝑏𝑓
𝐻𝑜𝑟𝑠𝑒𝑝𝑜𝑤𝑒𝑟 = 𝑃 =
𝑀 ∙ 𝑅𝑃𝑀 31.5 ∙ 2,674
=
= 1.34ℎ𝑝
62,500
62,500
(11)
(12)
(13)
(14)
22
Design Methodology & 3D modeling
After the functional and derived requirements were defined, the creative design process
begins. The three dimensional parametric CAD software Pro/Engineer® was used to create a
detailed 3D model of the milling machine. Pro/Engineer® and similar, history based, CAD
modeling software tools define the three dimensional geometry of each component by adding or
subtracting material to create each feature of a part; the dimensions of each feature are
parameters within the model that can be edited at any time to quickly make changes to the part.
Additionally, metadata such as material, density, tolerances, and datums are all stored within the
solid model.
The frame was the first area of the machine to be designed. By its very nature the frame
of a milling machine must provide interfaces for all major components and must provide a load
path for all forces and moments to be reacted. Managing the interfaces can be a daunting task at
the beginning of the design phase when many of the interfaces have not yet been fully defined.
To efficiently deal with this problem, a “top down” modeling approach was used. In the “top
down” approach component parts are created within the assembly model by establishing
relationships to the parts already modeled in the assembly. This allows for individual
components and interfaces to be created and edited very quickly. For example: if one part is to be
joined to another with a hole pattern, the detail design of the hole pattern need only be drawn and
dimensioned on one part because the hole pattern in the second part can reference the existing
hole pattern. This capability, when implemented correctly, can allow for significant changes,
which affect multiple components, to be executed without editing each individual component.
This capability drastically reduces the time needed to package parts within the frame and create
the complex joint geometry required to implement the main design evolution.
23
Key activities accomplished using the 3D modeling tool were packaging of all the
components, evaluating the assembly for interferences, determining the masses of the moving
assemblies, and creating detailed drawings for parts to be custom machined.
Packaging of the components is not a trivial task due to the small overall size of the
desktop milling machine. As an example the X axis linear motion components are examined. As
shown in Figure 9, the X axis linear guides, X axis lead screw, X-Z adapter plate, X axis
attachment to the X-Z adapter plate, and X axis way covers (not shown) are all located in a small
volume. The finished packaging is the result of the design intent which includes considerations
such as gantry stiffness, adjustability of the X ballnut connection, minimizing weight, machine
CG, minimizing offset of the Z-axis linear guides, and minimizing the complexity of the
individual parts. The design considerations left little room for fitting limit switches necessitating
the addition of brackets to mount the limit switches in gantry frame holes originally designed to
reduce the weight of the gantry. The packaging for the Z axis assembly was equally constrained.
Figure 9. Packaging of X axis components
One of the most valuable capabilities of the 3D design model is the ability to evaluate
the assembly for interferences. In the case of the desktop milling machine, as the design matured
each of the three axes of motion were virtually moved to their extreme positions determine if any
interferences existed which would prevent the full range of motion. This ability extends beyond
24
evaluating the function of the machine and to the ability to evaluate interference during the
assembly process. In the case of the proposed milling machine design, one of the parts must be
inserted through an opening in another part and then rotated ninety degrees into its final position;
upon evaluation of this assembly process it was noted that the part could be inserted but then it
could not be fully rotated into the final position. After discovery of this interference, the design
was revised to eliminate the interference during the assembly process.
When the design has matured the “top down” modeling approach can be somewhat
undesirable since the model relationships between the parts are still present. Unknowingly
making changes is a very real risk which can cause problems especially if some parts have
already been fabricated. At the point when parts area ready to be drafted for fabrication it is often
beneficial to revert to the more traditional “bottom up” approach where all features are defined
within each component and model relationships between components are not used. The “bottom
up” approach will make the executing major changes to the assembly more time consuming but
results in a more stable model. For the milling machine project, at the time that detail drawings
were created for purchased or manufactured parts the models were redefined using “bottom up”
principals.
Design for Manufacturing and Assembly (DFMA)
The primary design evolution of using strictly two dimensional sheet steel components is
contrary to accepted DFMA guidelines, which emphasize the reduction of total part count [10].
Since no cost comparison was made to casting or other methods of manufacturing, it is difficult
to conclude that the proposed steel components are beneficial or detrimental to the cost of the
prototype milling machine structure. Qualitatively, it is believed that the cost of the laser cut
components is so much less than the cost of casting or machining a more complete assembly that
25
the cost of the additional assembly labor becomes negligible. Additionally, the commercial
market for desktop milling machine are assumed to be very small it is hard to image that the nonrecurring costs associated with casting or complex machining could be effectively amortized
over a small number of assemblies.
Other aspects of DFMA guidelines have been fully embraced in the design of the
prototype-milling machine; the machine frame components are designed with intentional
symmetry and where symmetry is not possible, the parts are obviously asymmetric. The selfaligning geometry of the frame joints is inherently compliant to the ideas of DFMA since no
special tooling or assembly aids are required to assemble the frame. A significant number of
fasteners are used to attach components to the frame assembly; eliminating fasteners in favor of
snap fits was not practical however effort was made to standardize the threads and number of
fasters as much as was reasonably possible.
Component Selection & Machine Assembly
Linear Guideway
Selection of the linear motion components and motion control system is an important
part of the prototype milling machine design. These commercial off the shelf components are
just as critical as any of the parts specifically designed for the machine. Linear motion of the
milling machine axes is accomplished by linear guideways and drive screws. The screws can be
driven by a number of various motor types in an open or a closed loop control system. The
selection of the components will have a significant overall impact on the performance and cost of
the prototype milling machine.
Typical linear guideway systems used on small CNC machine tools include integral
ways, linear profile rail, and cylindrical shafting. Large freestanding cast iron manual machine
26
tools are typically manufactured with integrated ways. Ways can be manufactured in a number of
different configurations including square, dovetail, V, double V, and others [14]. Integral ways
require thick cross-sections and finishing of the surface by precision grinding and sometimes
hand scraping. The advantages of ways include high accuracy, large load capacity, and good
damping. For the prototype milling machine, integrated ways are not practical considering the
welded steel construction, cost limitations, and the predicted machining loads.
The most inexpensive machines in the desktop milling machine market feature
cylindrical shafting with sliding bearings; this type of linear guideway has supports at each end
of the shaft causing horizontal shafts to be loaded in bending resulting in significant deflections
and therefore reduced accuracy.
Linear profile rail and recirculating ball bearing liner guide blocks were selected for the
prototype milling machine design. This type of linear guideway consists of a hardened steel rail
with a specific profile machined for sliding blocks which incorporate ball bearings. Rails and
blocks are available in numerous sizes with varying load capacities and accuracies. Typical
applications of linear profile rail in the machine tool industry include small to medium size free
standing multi-axis machining centers. For the prototype milling machine design, 20mm wide
profile rails were selected. The load capacity of this rail size was more than necessary for the
machine design but the overall height of the rails was easier to integrate into the design than
smaller linear rail sizes. The rails and bearing blocks were available off the shelf at a cost of less
than two hundred dollars per axis. The rails will be bolted directly to the frame structure and
shimmed flat if needed.
27
Linear Positioning
Linear positioning of machine tools is most often accomplished with power screws.
Manual milling machines are typically equipped with trapezoidal screw forms such as ACME
threads. Square and trapezoidal thread forms are selected for use in manual milling machines for
their low cost and large shear load capacities however, they suffer from significant backlash. In
CNC machine tools backlash leads to cumulative error in the positioning system and therefore is
not desirable. Ball screws are commonly used on CNC machine tools to reduce or eliminate
backlash as well as reduce friction [1]. Ball screws feature nuts with preloaded, recirculating,
ball bearings which roll in the circular thread form of the screw. Figure 10 shows a cross-section
of a ball screw. Others methods such as liner motors have been successfully integrated into
commercial machines but are generally reserved for very high accuracy machine tools [15]. For
the prototype milling machine 16mm diameter, 5mm lead, ball screws with a backlash of less
than .0006 inches were selected. Smaller, half inch screws were originally identified for the
projected load capacity however, the larger 16mm screws were selected primarily due to their
low cost.
28
Figure 10. Illustration of ball screw and ball nut
Positioning Motors and Drives
The positioning system elements of a machine tool consist of the control system, motors,
and drives. Before motors can be specified it must be determined if the control system will be
open loop or closed loop. Open loop control systems do not have any feedback to determine if
the actual position realized is the same as the command position. Conversely, closed loop
position systems take feedback from instrumentation and compare the measured position with
the commanded position making corrections where necessary. For the positioning system of the
prototype milling machine, both open and closed loop systems were considered.
For light duty CNC positioning, low cost open loop control systems can be used.
Typically, open loop control systems are used with stepper motors since by design the stepper
29
motor will rotate a known angle for a given number of pulse signals sent to the motor.
Disadvantages of stepper motors include the possibility of dropping steps. Under certain load
conditions, the motor can lose synchronization with the commanded digital step pulses causing
errors between the command and actual position; since no feedback device is integrated into the
system the error is not corrected and errors will continue to accumulate until the system is
‘zeroed’ by commanding the drive to a known position [16].
Closed loop servo systems can utilize either AC or DC motors and linear or rotary
encoders. AC servo motors feature a permanent magnet rotor and do not require mechanical
commutation; they are smaller in size than a DC motor for a given power output but they are
more expensive and require a more complicated 3phase PWM controller. Brushed DC servo
motors are inexpensive and require a simpler controller than AC motors however, they the
brushes require regular maintenance and can limit acceleration. For the prototype milling
machine the added accuracy of a closed loop system was desired but managing component costs
drove to the selection of a 200 in-oz constant torque brushed DC servo motors and shaft mounted
optical encoders. Equations 15, 16, and the constants in Table 5 are used to calculate the motor
size. The calculation shown is specifically for the X-axis; all axes were evaluated and the X-axis
was determined to be the bounding case.
Table 6. Constants and sources motor size calculation
Symbol
Units
Description
Value
Source
W
lbf
Weight of Driven Load
70
Design Model
Fc
lbf
Tangential Cutting Load
70
Equation 10
SF
-
Safety Factor
1.25
Assumed
µ
-
Ball Nut Coefficient of Friction
.5
Assumed
L
in/rev
Lead Screw Pitch
.2
Lead Screw Specification
dp
in
Lead Screw Pitch Diameter
.5
Lead Screw Specification
30
𝑇𝑜𝑡𝑎𝑙 𝐹𝑜𝑟𝑐𝑒 = 𝐹𝑡 = (𝐹𝑐 + 𝑊)𝑆𝐹 = (70 + 70)1.25 = 162𝑙𝑏𝑓
𝑇𝑜𝑟𝑞𝑢𝑒 = 𝑇 =
16 ∙ 𝐹𝑡 ∙ 𝑑𝑝 𝐿 + 𝜋 ∙ 𝜇 ∙ 𝑑𝑝 16 ∙ 162 ∙ .5 0.2 + 𝜋 ∙ 0.5 ∙ 0.5
∙
=
∙
= 198𝑖𝑛-𝑜𝑧
2
𝜋 ∙ 𝑑𝑝 − 𝜇 ∙ 𝐿
2
𝜋 ∙ 0.5 − 0.5 ∙ 0.2
(15)
(16)
Spindle
The spindle for the prototype milling machine was selected as an off-the-shelf
commercially available part. Finding a commercially available spindle at a reasonable price
turned out to be very difficult, in then a standalone spindle was purchased from ACT machines
who also sells the same spindle integrated into their DMC-III milling machine which was
including in the benchmarking analysis. Small catalog spindles from companies which
manufacture spindles for machine tools were investigated and found to be prohibitively
expensive. The selected spindle features an ER-16 collet for toolholding and four bearing
construction for use at up to 12,000 RPM.
To drive the spindle a 2hp, 220V, 3600RPM, three-phase, AC motor was selected and
combined with a variable speed inverter drive. The motor and drive pairing will allow for
constant power speed range from 500 to 5000RPM. The 3phase AC motor was selected for its
low cost and excellent torque compared to DC motor alternatives. The inverter drive selected
will allow for the motor and drive to be powered from 220V, 1phase power per the design
requirements.
Other Machine Features
In addition to the features discussed, many other features have been designed into the
prototype milling machine. Limit switches are necessary to initialize the location of each axis as
well as provide a safeguard for limiting the travel of each axis. Mechanical limit switches were
31
selected and brackets were designed to ingrate them into the machine. Covers were designed to
protect the linear guideways and ball screws on each axis. On the Y-axis, nested sheet metal
covers were designed to provide robust protection from chips which will accumulate in the
machine base. The X and Z axis were designed to be protected by rubberized fabric accordion
type covers. These covers are less robust but the X and Z axes will not be subject to the chip
accumulation that the Y axis will. Safety covers a machine enclosure have not yet been designed
however, mounting holes were included in the frame to attach covers which can be designed and
manufactured later. The machine table features t-slots to allow workholding flexibility. A catalog
standard cable carrier was selected to provide a cable path between the bridge and the Z-axis
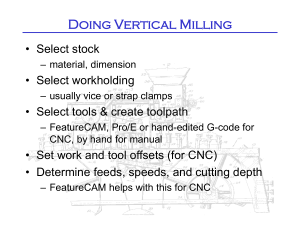
assembly. Figure 11 shows the completed design model with the exception of the X-axis way
covers and cable carrier.
Figure 11. Design model for the prototype milling machine
32
Chapter 4. ANALYSIS AND TESTING
Evaluation of Cutting Technologies
Evaluation of high accuracy cutting technology was completed prior to cutting the parts
for the static load test article or the prototype milling machine. Initially three cutting
technologies were considered: plasma, abrasive waterjet and laser cutting. Plasma cutting is the
cheapest of the three options but was not selected for further evaluation due being the least
accurate method. Laser and abrasive waterjet cutting were further evaluated by manufacturing
sample parts from quarter inch steel plate. Before the test was completed it was thought that
abrasive waterjet cutting would have an advantage over laser cutting since it imparts very little
thermal energy into the parts being cut. However, visual inspection of the laser cut samples
showed discoloration due to high heat was limited to an area only .030 inches from the cut edge.
Figure 12 shows laser cut and abrasive waterjet cut samples side-by-side; the cut surface of the
abrasive waterjet cut part has a better surface finish however the waterjet samples showed
significantly more variation in the form of the cut surfaces. It is not apparent in Figure 12 but the
cut surfaces of the waterjet samples were observed to have more taper than the laser cut surfaces.
The larger taper suggests that the water stream diverges faster than the laser beam for the same
thickness material. After evaluation of the samples laser cutting was selected as the method to
fabricate the components of the prototype milling machine frame assembly.
33
Figure 12. Laser cut (left) and waterjet cut (right) sample parts
Early in the design process, it was intended that all features, which could be orthogonally
projected onto the surface of the plate material would be cut at the same time. Most tapped holes
in the frame design are required to be tapped with a #10-24 national thread, which has a nominal
minor diameter of 0.138 inches. The sample laser cut parts showed that laser cutting could not
produce small holes in the .25 inch thick material. It was evident that too much heat
accumulation in a very small area during the laser piece and circular interpolation caused local
melting and significantly oversized holes. The problems producing small holes could be isolated
to the particular supplier used for the fabrication of the sample part; time and budget did not
allow for samples parts to be fabricated at multiple suppliers therefore the holes were removed
from the models exported to the laser cutting supplier. When the milling machine frame
components were cut the location of the holes was marked on the part by laser engraving the
surface in the same operation as the laser cutting.
34
Finite Element Analysis
Finite Element Analysis (FEA) is an analysis technique, typically computer aided,
applied to parts and assemblies with geometry and load conditions which cannot be easily solved
using classical mechanics. The geometry of the object being studied is discretized into many
small parts, called elements, which are geometrically simple. Differential equations describe the
shape of each element and the relationship between adjacent elements. The differential equations
are organized into matrix form and solved iteratively. From the solution, the stress state and
deformations of each element and therefore the complete object can be extracted [17].
Prototype Milling Machine Analysis
To determine the deflection characteristics of the machine under its own weight and
operational forces, a FEA analysis was completed. A simplified 3D model of the machine frame
was created from the detailed design model specifically for the purpose of FEA. Features such as
small holes and assembly gaps were removed to reduce the complexity of the model. Since the
machine frame has a plane of symmetry, only half of the frame was exported to the FEA
software.
When meshing the machine model a problem was immediately encountered. Since the
overall machine is large compared to the section thicknesses of the plate members, the number of
elements needed to create a solid body mesh of sufficient density to give a desirable number of
elements though the thickness of each plate member quickly exceeded the memory of the
available computing resources. Meshing the machine frame model with brick type elements such
that the plates were a minimum of three elements thick resulted in over one million elements.
The frame deflection analysis was completed using a course mesh of tetrahedral elements, which
was able to be solved with the available computing resources.
35
Two load cases were run for the machine frame FEA. The first load case corresponds to
the maximum tangential load due to milling and the second load case corresponds to the
maximum load due to drilling. For the milling load case, the tangential force was assumed to
apply parallel to the plane of symmetry to provide the maximum torsional load to the machine
bridge. Reaction forces at the X-axis linear guide bearings were calculated assuming maximum
tangential force and assuming that the z-axis was extended all the way to the machine table; the
weight of the Z-axis assembly was also considered in determining the reaction forces. Forces
were also applied to the Y-axis and frame based to represent the reaction of the maximum
tangential cutting force by the machine table.
Figure 13. Deformation Plot for FEA due to maximum tangential forces
Results of the milling load case show maximum deformation in the bridge of .0007 for
the upper linear guideway bearing and nearly zero for the lower linear guideway bearing (Figure
13). The deformation results will create and angular error in the Z-axis assembly. The two
36
guideways are four inches apart however the cutter is considered to be 12 inches vertically
projected form the center of the guideways resulting in a error in the cutter location of .0021
inches. This results corresponds to the largest anticipated contributor to geometric error under
full load and is well within the goal of .005 inches established in the requirements.
The maximum loads from the drilling case were also analyzed in the FEA model
generating an angular error of .0009 inches over the same four inch separation. Projecting the
error down to the table results in a geometric error of .0031 inches, again well within the .005
requirement.
Static Load Test Article
To validate the results machine frame model, a smaller portion of the machine frame,
specifically the bridge area, was subjected to physical testing. Pre-test predictions for deflection
were made using FEA models with both a course tetrahedral element mesh and a finer brick
element mesh. Reducing the FEA geometry to the bridge section of the frame allowed the
available computing resources to solve a finer brick element mesh model. Like the prototype
machine frame FEA, the bridge section was simplified by leveraging a plane of symmetry.
Figure 14 shows both meshes used in the FEA predictions.
Figure 14. Comparison of Meshes used for FEA for bridge test predictions
37
Loads between 100 and 4000 lbs were applied to the edge of the top surface where the
top surface intersects the plane of symmetry. Along with stress and strain contour plots the
vertical deflection at the center of the front bottom edge was extracted. As shown in Table 7, the
deflection magnitudes were nearly identical for both meshes used.
Table 7. FEA Deflection Results with Different Mesh Techniques
Load (lbf)
100
200
500
1000
1500
2000
3000
4000
Vertical Deflection at Bottom Front Center (in)
Fine Bricks
Course Tets
Difference
0.000049
0.000048
0.000001
0.000100
0.000097
0.000003
0.000253
0.000245
0.000008
0.000508
0.000492
0.000017
0.000763
0.000738
0.000025
0.001018
0.000984
0.000033
0.001527
0.001477
0.000050
0.002037
0.001970
0.000067
The physical test configuration places the bridge section of the machine frame under a
three point bending load at the applied loads used in the FEA. The bridge is support at both ends
on the bottom and the load is applied to the center of the bridge at the top plate. Bridge deflection
is measured at the bottom center of the bridge under the front plate using a dial indicator. Figure
15 shows a photograph of the test article installed in the load frame.
38
Figure 15. Test article installed in load frame
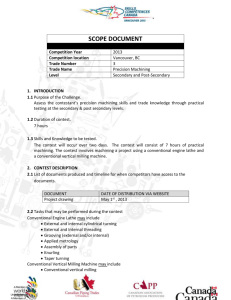
Figure 16 shows a plot of the measured deflection and the predicted deflection versus
applied load. Due to an error with the test program the loading of the test article was not paused
at 1500 pounds resulting in no test data collected at the 1500 pounds. The FEA prediction as the
test results do not correlate well; at low loads the test data shows a nonlinear behavior not
predicted by the analysis. The disconnect between the prediction and the actual values can likely
be explained by the simplifications assumed in the FEA model; the most significant of which is
that the FEA model assumes that all interfaces are rigidly bonded whereas the actual test article
was welded at intervals rather than continuously joined. The non-linear behavior at low loads
could possibly be explained by compliance of the non-welded interfaces until the load was
increased to the point where the load path was dominated by the welded joints. Above 500
39
pounds the stiffness results appear to be family with the test article stiffness being lower than the
predicted stiffness but a separated by the offset associated with the low load non-linear behavior.
Prototype Machine Bridge Deflection
0.007
Deflection (in)
0.006
0.005
0.004
0.003
0.002
0.001
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Load (lbf)
Test Data
FEA Prediction
Figure 16. Prototype Machine Bridge Deflection Test Data and FEA Predication
It is noteworthy that the deflection at the 500 lb load was slightly above .002 inches.
Since the predicted maximum operating loads applied to the bridge are less than 500lb it is safe
to assume that the bridge deflection under operational loads will meet the derived requirement
for bridge deflection.
40
Chapter 5. PROTOTYPE MACHINE FABRICATION AND ASSEMBLY
Component Fabrication
With the frame design completed and laser cutting selected as the preferred
manufacturing method, the parts for the prototype milling machine assembly were procured. All
the parts for one complete assembly easily nested onto on five by ten foot sheet of plate stock.
Small holes were removed from the laser cut geometry and drilled after the plates were laser cut.
Figure 17 shows many of the laser cut frame components prior to assembly. Some of the parts
were bowed but such distortion is not unexpected in steel plate material; no attempt was made to
flatten or straighten the as-received parts. The edge finish was excellent and only required
deburring near the pierce points. After the parts were cut, numerous holes were drilled and
tapped and a number of bevels were ground on the edges of some parts to create grooves for the
welding operations.
Figure 17. Laser cut parts for the prototype milling machine
A number of other parts needed to be manufactured to assemble the prototype milling
machine including the machine table, bearing blocks, X-Z adapter plate, and other parts
41
necessary for the assembling the linear motion components. These parts were all manufactured in
the student machine shop at California State University, Sacramento.
Assembly Process
The assembly process for the machine frame started by fitting the laser cut components
together to check the fit and for potential interferences. Figure 18 shows the machine frame base
components fit together prior to welding next to an image of the same components from the three
dimensional design model. The interlocking parts fit together exactly as planned with tight gaps
and no adjustments needed to fit the parts together. No interferences were discovered during the
assembly process.
Figure 18. Assembly fit check and 3D model of frame components
The parts were fit together using only clamps. Small tack welds were used to hold the
components together as more and more pieces were added. Figure 19 shows the prototype
assembly with only two component parts not yet fit. After all components were fit together, the
assembly was joined using arc welding. Welding was deferred until all the parts were fit together
because it was postulated that the numerous self-aligning features would help contain the
assembly during welding and minimize deformation driven by the welding process. Specifically,
flux cored arc welding (FCAW) was used to weld the prototype assembly although other types of
42
arc welding such as gas metal arc welding (GMAW) or gas tungsten arc welding (GTAW) would
be suitable or joining an assembly of this type. When welding the assembly, two or three joints
were welded on one side of the assembly then the assembly was rotated and welded on a
different side in an attempt to equally distribute the heat input from the arc welding process.
Overall, less than eight hours were spent fitting and welding the primary frame assembly, which
is remarkably fast for the first assembly considering the number of components and welded
joints.
Figure 19. Prototype milling machine frame during assembly
Assembly of the Z axis frame subassembly proceeded as expected with similar results to
the primary frame assembly. After both frame components were fully assembled the linear
43
guideways, ballscrews, and other components necessary to attach the Z-axis assembly to the
primary frame were installed. Figure 20 shows the milling machine with the Z axis attached.
Figure 20. Prototype Milling Machine Assembly
Measurement of Geometric Error
In an attempt to quantify the variation of the frame surfaces where the rails mount, the
flatness of the frame was measured. To accomplish this, the frame was placed on a granite
surface plate and leveled prior to taking height measurements using a dial indicator. The results
are plotted in Figure 21. Measurements were taken prior to the mounting of the rails. At first
glance the results of the inspection may appear discouraging but the deviations in the flatness
should be easily adjusted for by shimming of the rails. The results of the two Y-axis rail
44
locations do not correlate as well as the other axis rail locations; this is likely explained by the
fact that the Y-axis rails are separated more than the other axis rails and that the frame
supporting the Y-axis rails is discontinuous due to a slot designed to accommodate the Y-axis
lead screw.
Frame Flatness Under Rails
0.0300
Flatness Variation (in)
0.0250
0.0200
X-axis Rail 1
0.0150
X-axis Rail 2
0.0100
Y-axis Rail 1
0.0050
Y-axis Rail 2
Z-axis Rail 1
0.0000
-0.0050
-0.0100
0
5
10
15
20
Distance Along Guide Rail (in)
Figure 21. Plot of frame flatness vs. distance at the rail mounting surfaces
Z-axis Rail 2
45
Chapter 6. RESULTS AND CONCLUSION
Conclusions
The concept of designing a CNC desktop milling machine with a frame composed
entirely from two-dimensional CNC cut plate steel components was investigated. Requirements
were established and a desktop CNC milling machine was designed. The machine structure was
fabricated and assembled yielding the opportunity to evaluate the proposed manufacturing
technique. The frame for the prototype machine was quickly and easily assembled benefiting
from the complex interlocking joints designed throughout the structure. The prototype milling
machine was not completed to the point of being operational however flatness data was
measured on the finished frame structure. The data indicated that the structure was not as flat as
comparable machined surfaces; it is believed that this shortfall can be overcome with shimming
of the linear motion components.
The biggest disappointment was the fact that the numerous small holes required
throughout the frame design could not be manufactured in the same operation where the frame
components were laser cut. Overall, the manufacturing concept was proven and is perceived as
plausible for manufacturing small machine tools such as a CNC milling machine.
Future Considerations
Sufficient time was not available to completely bring the prototype milling machine to
an operable state. Work should be continued to complete the machine and determine its
operational capabilities. It is also recommended that more work be completed on FEA modeling
of the static deflection test to see if a better match to the test results can be obtained.
46
During the evolution of the design concept and the assembly process of the prototype
milling machine the potential flexibly of the interlocking joint concept was observed. The design
of the prototype milling machine could easily be manipulated with changes to reltively few parts
to produce a machine with drastically different capabilities; for example the Y-axis length could
be easily doubled with minor changes. Additionally, the design features and methods researched
and tested as part of this thesis could potentially be expanded upon to develop kits of
components, fabricated using similar methods, which could be assembled in different ways to
obtain different products depending on the configuration of the assembly.
Model
DMC-III
MDX-540
CNC Express
Desktop Mill
PCNC770
CNC3040Z+S
Model
DMC-III
MDX-540
CNC Express
Desktop Mill
PCNC770
CNC3040Z+S
Brand
ACT
Roland
MicroKenetics
MicroKenetics
Tormach
Carving-CNC
Brand
ACT
Roland
MicroKenetics
MicroKenetics
Tormach
Carving-CNC
Gantry
Contstuction
Unknown
Unknown
N/A
N/A
N/A
Aluminum
Motion Support
Linear Guide Rail
Linear Guide Rail
Dove Tail Ways
Ways
Ways
Cylindical Shaf Rail
Screws
Ball screws
Ball Screws
Unknown
Unknown
Ball Screws
Ball Screw
Travel
Price
Retrofit Design
X
Y
Z
$ 8,500
No
Fixed Gantry
12.0
8.0
$ 31,000
No
Fixed Gantry
19.6 15.7
$ 6,000
Yes
Round Column 17.0
7.0
$ 3,500
Yes
Square Column
9.0
5.0
$ 6,800
No
Square Column 14.0
7.5
$ 1,200
No
Moving Gantry
16.1 11.0
Motors Rapids (IPM) Acceloration (G) Limit Switches Way Covers
No
Optical
Unknown
60
Stepper
Yes
Yes
0.1
295
Servo
No
Yes
Unknown
150
Stepper
No
Unknown
Unknown
Unknown
Stepper
Yes
Unknown
Unknown
135
Stepper
No
Unknown
Unknown
157
Stepper
6.0
6.1
5.0
6.5
13.3
3.0
Table Size
Table Clearance
Construction
W
D
Work Weight (lb) Workholding
6.25 Cast Iron Base
22.0 20.0
Unknown
T Slots
Unknown
Steel
21.0 16.0
44
Unknown
Unknown
Cast Iron
28.5
8.3
Unknown
T Slots
Unknown
Aluminum
13.0
2.8
Unknown
T Slots
14.8
Cast Iron
26.0
8.0
400
T Slots
3.5
Aluminum
22.0 12.6
Unknown
T Slots
Machine Dims (in)
RPM
Power In
H
D
W
Weight (lb)
Coolant
Drive
Tool Interface Min Max
Spindle
Enclosure
110 1P
28.0
23.0
27.0
260
Coolant Ready
Timing Belt
ER11/16 Collet 1500 12000
1/3HP DC
No
100/220 1P
33.8
37.6
29.3
225
No
400 12000 Integrated Motor
15T Collets
400W DC
Optional
110 1P
Unknown Unknown Unknown
700
Optional
120 2500 12 speed Belt Drive
R8
2HP AC
No
Unknown Unknown Unknown Unknown Unknown
No
2800 2 Speed Belt Drive
75
MT1
1/2HP DC
Yes
110 1P
Unknown Unknown Unknown
660
Optional
175 10000 2 Speed Belt Drive
R8
Optional 1HP AC VFD
110/220 1P
18.9
20.9
26.0
96.8
No
1000 24000 Integrated Motor
ER11
800W VFD
No
Model
DMC-III
MDX-540
CNC Express
Desktop Mill
PCNC770
CNC3040Z+S
Brand
ACT
Roland
MicroKenetics
MicroKenetics
Tormach
Carving-CNC
47
Appendix A. Benchmarking Analysis
48
Appendix B. Selected Drawings
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
Works Cited
[1] H. A. Youssef and H. El-Hofy, Machining Technolgy: Machine Tools and Operations, Boca
Raton: CRC Press, 2008.
[2] T. J. W. C. Drozda, Tool and Manufacturing Engineers Handbook, Volume 1: Machining,
Dearborn, Michigan: Soceity of Manufacturing Engineers, 1983.
[3] W. S. Seames, Computer Numerical Control: Concepts and Programming, Volume 2, New
York: Delmar, 1990.
[4] "Haas Automation Inc.," [Online]. Available: www.haascnc.com. [Accessed 14 9 2012].
[5] F. T. J. Koenigsberger, Machine Tool Structures, Volume 1, Oxford: Pergamon Press, 1970.
[6] M. Weck, Handbook of Machine Tools Volume 2 Construction and Mathematical Analysis,
Chichester: John Wiley & Sons, 1984.
[7] J. e. a. Kresse, "Joint for Single Side Welding and Self-Fixturing of Closed Steel Sections".
United States Patent 5,221,585, 22 Jun 1993.
[8] Rosenbalm, "Method of Fabricating Sheet Metal Structures by Welding and Structure
Formed Thereby". United States Patent 5,878,940, 9 Mar 1999.
[9] K. e. at., "Method for Securing a First Fabrication Element to a Second Fabrication Element
During a Welding Operation". United States Patent 6,131,286, 17 Oct 2000.
[10] G. Boothroyd, P. Dewhurst and W. Knight, Product Design for Manufacture and Assembly,
Second ed., New York: Marcel Dekker, 2002.
[11] M. Rahman, A. Mansur and B. Karim, "Non-Conventional Materials for Machine Tool
Structures," JSME International Journal Series C Mechanical Systems, Machine Elements
and Manufacturing, vol. 44, no. 1, pp. 1-11, 2001.
[12] D. G. Ullman, The Mechanical Design Process, Boston: McGraw Hill, 1997.
[13] National Aeronautics and Space Administration, Systems Engineering Handbook, 2007.
78
[14] W. R. Moore, Foundations of Mechanical Accuracy, Bridgeport: The Moore Special Tool
Company, 1970.
[15] Sodick, Inc., "Linear Motor Technology," [Online]. Available:
http://www.sodick.com/technology/linearmotor. [Accessed 1 11 2012].
[16] A. Hughes, Electric Motors and Drives, Amsterdam: Elsevier, 2007.
[17] V. Adams and A. Abraham, Building Better Products with Finite Element Analysis, Sante
Fe: Onward Press, 1999.