Indian Railways Institute of Mechanical and Electrical Engineering
advertisement

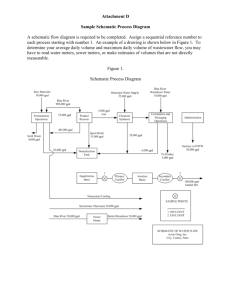
14. Electrical Systems & Traction Alternator Design & Aux. System Design 14.1 Locomotive Electrics- Basic AC-AC System: The system basically uses diesel engine, alternator, rectifier, d.c. link, invertor(s) and asynchronous motors. The alternator is directly coupled to the diesel engine. The frequency of the alternator output varies with the speed of diesel engine. The voltage is rectified and the power is fed through a d.c. link to the invertor of the tractive system. Drive system uses asynchronous motors. Asynchronous motor when used on railway vehicle has to be supplied variable alternating voltage of variable frequency (VVVF). This is accomplished by the invertor the input to which is d.c. voltage through d.c. link. All AC-AC diesel locomotives employ this principle. The number of invertors and the size of the alternator depends on the amount of energy to be converted. ENGINE GENERATOR INVERTOR TRACTION MOTOR G 3~ = M 3~ 3~ The electronic control system ensures that the correct control inputs are given to the invertor. It also controls and monitors the diesel engine, the alternator and the other auxiliaries of the locomotive. It is the central control unit which ensures that the locomotive operates optimally. 14.2 Main Alternator and Companion Alternator Alternator is foot mounted with flange coupling with the engine. Alternator TA17 is a 3 phase, 10 pole machine equipped with two independent and interwoven sets of stator winding. It is basically two generators in one - two sets of stator windings, permanently connected in series, work with a rotating field common to both the windings in order to provide a higher generator output voltage, which is a basic requirement of a low current high voltage generator used on AC-AC locomotives. The main alternator has a companion auxiliary generator CA 6 for power supply to large auxiliaries. It is also the main excitation source for the main alternator. The companion alternator is an electrically independent machine and is mechanically coupled on the main shaft of the traction alternator. The companion alternator rotor field is excited directly by auxiliary supply of the locomotive (74+4 VDC). It receives the excitation current from the auxiliary generator through slip rings located adjacent to the slip rings of the main generator. The output voltage is directly proportional to the speed of rotation but varies to some extent with change in alternator temperature and load. Both these alternators are forced air cooled. A dedicated blower coupled to the engine crankshaft provides cooling to the Alternator / Rectifier system. The air flow pattern has been depicted below. Axial & Radial Cooling In EMD Alternator AIR FLOW STS STACKS CORE AIR FLOW COMPANION ALTERNATOR RECTIFIER ALTERNATOR MAIN WINDING 14.3 Rectifier AC output from the main alternator is supplied to air cooled rectifier. The rectifier assembly consists of high current, high voltage silicon diodes connected in 3 phase full wave bridge rectifier circuits. RC circuits are connected to suppress the transients signal. 14.4 Traction Motor The asynchronous motor with a squirrel cage rotor is the simplest of all electrical machines. When fed by a 3- phase alternating voltage, a magnetic field rotates in the stator. The speed of rotation of this field is directly proportional to the frequency of the A.C. voltage. The rotating magnetic field causes the rotor to turn at a slightly lower speed due to electric slip. This difference in speed is responsible for the development of the torque. The only winding fed with voltage in the asynchronous motor is housed in stator. To prevent hot-spot developing in winding overhang, it is directly ventilated. The winding is impregnated under vacuum. There are no exposed metallic parts, so that excellent protection is assured. The rotor is squirrel type, i.e. it consists of un-insulated copper bars joint to sturdy short-circuiting rings. There is no commutator, sliprings, Brushgear or anything similar. Following aspects are given primary importance while designing AC traction motors : Vibrations and shocks from track Envelope dimensions - more torque packed in small space Reliability - TM subjected to different elements like movement of locomotive, dirt heat & humidity Presence of transients Requirement of starting and road characteristics 14.5 Electrical Control Cabinet No. 1 (HVC) Electrical control cabinet is for mounting of the following main equipment : Main Control Panel DC Link switch gear Braking contactors Circuit breakers EM2000 computer chassis EM2000 support hardware GFC, GFD & IMGF SCR bridge Power supply for GTO1 & GTO2 TCC blower contactors - six numbers IB1 ,IB2 , IBKBL1 , IBKBL2 transducers Display Screen on ECC#1 door Engine Control Panel TMA transducer 74 V receptacles The routine testing of HVC is an elaborate process . There is a dedicated test station which is microprocessor controlled and has the facility to check the important aspects related with performance and reliability, viz., continuity of all the wires on the cabinet and actual operation of the relays, switches and contactors. All the test data is logged, abnormalities identified and a printout is taken for undertaking the rectification work. The software for the test station is written in HP Basic. EM 2000 Modules, which are not mounted at this stage, are therefore not tested at EMD. The cabinet complete is despatched to DD , London, OT. 14.5.1 Design Aspects Of ECC#1 Ventilation Engineering of the cabinet has been done based on the cooling requirements of major components, e.g. power chassis , EM2000 , SCR Bridge Assembly. Main duct has been constructed along the wall sided which branches to supply air to the components. The panel is modular so as to facilitate quicker assembly. The cabinet is pressurised to avoid ingress of dust etc. A pressure of 2 to 3” of water gauge is maintained. No electro pneumatic contactors are used on this cabinet. Components and cables of a common electrical circuit are grouped together (e.g. GFC, GFD, RE2 , RE32, CA32 and the SCR Bridge) in order to reduce EMC interference. 14.5.2 Electrical Cabinets 2 & 3 Electrical cabinet number two and three are smaller cabinets than the HVC. These cabinets consist of the following components: Cabinet# 2. Auxiliary Generator circuit breaker ST & STA contactors - for starting of engine. RE11 & RE12 BCASM - Battery Charging assembly Provision for Shunt DC DVR - Digital Voltage Regulator Inductor L4,5,6 Air Filter Cabinet# 3 (AC Cabinet) 146 Cooling fan contactors -six numbers Terminal Boards MRPTs- Main reservoir pressure transducer DIP80 - Diode Panel and CMUX hardware for multiplexing Air Filter EM 2000 EM2000 is a modern locomotive computer control system. The system, has effectively replaced the outdated electronic and IC-based control systems used earlier. Some of the basic features of the system, inter alia, are Significant reduction in number of control modules Better fault detection of components Self diagnostics and self tests to aid in troubleshooting Memory archive and data snap shot The main computer chassis contains the following modules One CPU module which uses a 32 bit Motorola 68020 16 Mhz microprocessor Three Digital Input/Output (I/O) modules ( DIOs) One communication module (COM) One Analogue to digital and digital to analogue module ( ADA) One memory module ( MEM ) The computer chassis is split in the middle by a metal partition. The right houses the high speed data modules, CPU, MEM and COM. The left side houses the I/O handlers, i.e., ADA and DIOs. On the front of all the above modules, Fault LEDs are mounted on the face plate. These LEDs illuminate for a couple of seconds as part of the ‘power up’ diagnostic routine. These are tripped by watchdog timer faults, database errors or through certain other conditions satisfied in the software. 14.6.1 CPU Module CPU Module is the brain of the entire computer system. which processes all incoming locomotive parameters and controls locomotive responses to derive the operating characteristics. It contains the following hardware 32 bit Motorola 68020 16.5 Mhz microprocessor with a math coprocessor for enhancing the speed and efficiency of information processing Motorola 68881 floating point co-processor running at 16.5 M Hz 512 KB ‘flash prom’ memory storage which can be easily reprogrammed in the field with the aid of laptop computer communicating through an RS 232 port or through special module called MMB. While the time required to load a programme from MMB is approximately 15 seconds, the same through laptop computer is 15 minutes. The programme storage can be upgraded to 1 MB. 128 KB static RAM for data storage, which can be upgraded to 1 MB 64 K B static dual port RAM for inter processor communication . 6840 Programmable timers which are use for periodic inputs and out puts. RS232 Serial port with programmable baud rates. RS422 Serial port with programmable baud rates. One of these port is dedicated to the display unit. CPU module plays a very active role in SCR gating sequence as it sends the weak gate signals to the FCD and receives information from the zero cross detection circuit on the FCF so that it knows what phase angle to fire at to achieve desired alternator excitation. 14.6.2 Digital Input /Out Put (I/O) Modules The digital inputs and output to and from EM2000 are handled by three such modules. Each module has 24 input channels and 26 output channels. This module works as an interface between locomotive’s 74 VDC control system and the computer’s 5 VDC system. The DIO input channels are either +74 VDC or 0 VDC signals depending upon the relay/contactor status, picked up or dropped out. The DIO output channels, in turn, depend upon the logic built-up, either +74 or 0 VDC, so as to pickup or drop out the relay/contactor by supplying the gating power to the field effect transistor. Multiplexing is a selective monitoring process through which several inputs may be monitored through the use of only one input channel. In other words not all inputs need be monitored constantly. 14.6.3 Communication Module All the computers on board i.e. EM2000, Sibas 16, electronic brake computer etc. need communication with each other. The two traction computers SIBAS 16 communicates to each other and to EM2000. The link carries all sorts of the information which, inter alia, could be data ranging from torque requests, feed backs to contactor requests and acknowledgements to fault annunciation etc. 14.6.4 Analogue To Digital And Digital To Analogue Module It is responsible for converting analogue input signals to digital signal for processing the data and digital information from the CPU into an analogue signal that is required by the receiving device (external ammeters). It has within it Differential analogue inputs Hall effect transducer current inputs General purpose frequency inputs measurements for period & frequency 14.6.5 Memory (Archive Memory) Module This module holds dynamic locomotive parameters and archive data that are required to remain intact even in case of power failure. It has one 128 KB battery backed static RAM . which can be upgraded. The amount of data stored with each fault is substantial. For selected faults such as ground relay, data is stored from each of the 5 seconds before the occurrence of the fault. 14.6.6 Panel Mounted Modules Many other modules, called panel mounted modules, belonging to the EM2000 control are directly mounted to the rear panel of the HVC. These modules are- 14.7 Analogue signal conditioner modules- ASC 300- scales and filters analogue signals. Firing control driver - FCD 300 - amplifies SCR gate signals to control the CA6 output for main alternator field. Firing control feedback - FCF 300 - scales three phase companion alternator frequency feedback Voltage amplifying module- VAM 300- trainline 24 T interface for slow speed pace setter control ( optional for GT46MAC) Trainline filter - TLF 300- scales and filters digital data from trainline signals. Power Supply EM2000 control system requires different power supply and conditioner modules which are mounted in the Power Chassis. These modules are- 14.8 PSM 300 module for Power supply of +5V DC - the main power supply for EM2000 PSM310 module for +12VDC PSM 320 module for Power supply of +15VDC - for feed back circuits like hall effect transducer devices & analogue circuits viz. magnetic speed pickup PRG300 power regulator is the power conditioner for the PSM modules and functions properly even with the voltage variation within 20-95 VDC. It regulates the output voltage between 64-77 VDC when the input voltage is between 25-68VDC. If the input is beyond this range, there is a variation in the output within the acceptable limit. Development Of Software The software for EM2000, or any sophisticated computer system, is developed by EMD in the following stepsDevelopment of Sales Specification Finalization of System Specification Development of Software Specification Actual Software Code Writing Software Test A locomotive characterisation report, which identifies the exact type of the equipment used, defines all the functions and indicates the value of all the parameters, is issued by the Product Engineering group. This report forms the basic locomotive document and the foundation on which the entire software of the locomotive is built up. 14.9 Locomotive Performance & Train Run Simulation EMD has developed versatile computer simulation programme for train run simulation and offers this service to all its customers on commercial basis. 14.10 Thyristors, GTOs And AC Motor Control The thyristor offers immense advantages like compactness, high reliability, excellent time response and low loss. An added advantage of using thyristors in power converters for drive control is the easy manner in which they can be adopted for sophisticated feed-back schemes. As a result, microprocessor control of thyristor-drive systems can provide great operational flexibility. GTO thyristor or the ‘gate turn-off thyristor’ is referred to briefly as ‘GTO’. It is a four-layer silicon semiconductor device and is an improvement over the normal, slow devices used in line commutated converters into increasingly faster devices with better dynamic characteristics by refining the gate geometry. GTO allows fast turn-off with a negative current impulse by means of the gate alone, which is not possible with the conventional thyristor. This results in simplification of the converter circuitry. A three-phase inverter system with variable voltage and frequency output, is achieved by using GTOs for speed/torque control of 3-phase asynchronous motor. 14.11 Pulse-Width Modulation INPUT CONVERTER D C L I N K C A P. Six load carrying thyristors and six free wheeling diodes are the basic ingredients of three phase bridge inverter circuit. A DC-link capacitor is added for stabilising the DC-link voltage and supplying of magnetising reactive power required for induction motor. + + + M 3~ + + + V O L T. - S O U R C E I N V E R T E R PWM INVERTER CIRCUIT FIG-7 Amplitude and frequency setting take place solely by the principle of pulse width modulation (PWM). The max. possible amplitude of the phase-tophase output voltage Uv depends on the magnitude of the DC link voltage Ud such that, Uv = 0.78 Ud This method of voltage control of an inverter is known as pulse-width modulation. 14.12 Locomotive Cables, Wire Running And Layout GT46MAC locomotive employs mainly the Exxon cables. The cables used on this locomotive are classified into following categories: Category 0 These are used in the circuits with extremely high potential requiring increased creepage distances.(DC link cables) Category 1These are used in the circuits of high potential and high current levels ( Generator , Traction Motors and Battery Trunk Lines to be routed through cleats) Category 2 These are used in the circuits of AC voltage and high current DC voltage (conductors larger than AWG#12, not including traction circuit) Category 3 These are used in locomotive control logic wiring (typically 74 V DC including all electro mechanical devices) Category 4 Low voltage and energy control signal lines ( shielded multi conductor cables, and signals below 24 V) Category 5 Specific conductors requiring independent routing (communication radio antenna cabling, or high energy unfused conductors) 14.13 Locomotive Cabling: All the cables which are to be laid out on the underframe are performed with end lugs, connectors, sockets provided. For this purpose there is a separate section consisting of the wire measuring and cutting table, end shearing machine for preparing the ends and crimping of the lugs. The bigger size lugs are made in house using metallic tubes on a lug making machine, others are bought out from trade. The cabling on the underframe is done in the belly up position (in the overturned position) The cable layout has been so planned that all the cables are planned to run on only one side of the underframe i.e. on the left side in the belly up position looking from the short hood side. Brackets for the rubber cleats are welded to the underframe before the laying of cables is started and are located through out the length of the underframe. The power cables are laid first followed by the control cables. For the control wires running between EM2000 and Traction Control Cabinet use is made of special channel having EMI protection and runs on the top corner through out the length of U/frame. The cleats used are of BUNA-N rubber. Special clamps for smaller diameter cables are used which have a rubber lining to prevent the damage of insulation of cable due to vibrations and prevention from grounding. Splicing of the power cable going into the traction motor is done to avoid running of large number of cables from TCC and the exposed joints are covered using heat shrinkable silicon rubber boots. Cutouts on the underframe are already provided for the cables and no oxy cutting of the underframe is done at all during the cabling stage. A separate wire running list as per zone, wire category and wire tag is prepared and circulated to the shop to give details of wire running from source to destination. The wire running list is derived from the locomotive schematic as soon as the same is ready. 14.14 Electrical Schematics The schematic of GT46MAC consists of two major parts - EMD schematics and Siemens schematic. The schematic conventions followed by EMD and Siemens are different. The major equipment covered by the two sections of schematic are as underEMD schematic - EMD manufactured or vendor supplied equipment viz. alternator - rectifier, locomotive computer, electrical control cabinets including all switches, contactors and relays, auxiliary machines, safety and alarm circuits, third party equipment like radar etc. Siemens schematic - Siemens manufactured equipment viz. inverter and inverter control equipment, traction computer and traction motors. The EMD schematic is built around the main block diagram of the electrical equipment of the locomotive. The schematic is a representation of the hard wiring along with the connection/termination details of the equipment. All the computer/microprocessor modules, which control the operation of the hardware like relays, contactors etc., have been represented as a block. The logic used by EMD is not known. All the electrical sub-assemblies like ECCs, control consoles etc. have been allocated a zone identification. This schematic also explains the various wiring nomenclature used in the EMD schematic. For locating any item, the equipment locator chart provided in the schematic can be used which identifies location based on the zone in which the equipment in question lies on the locomotive and schematic sheet no. along with the location on the schematic sheet. Similarly, the circuit for any function like engine cooling control, engine governor control, traction motor bearing temperature probe etc. can be located easily in the schematic by using an alphabetical index. In addition, locator charts based on digital & analogue input/output functions employed on EM 2000. A chart detailing the location of various switches and circuit breakers as well as the sequence of operation of main interlock contact of the switches is also provided in the schematic. The schematic is very versatile and the category, size and specification of any wire can be read straightaway from the connecting points. In addition, details of all plugs and receptacles are also provided clearly indicating the used & potential free pin numbers. Details of terminal boards are also given with internal & external connections with locomotive wire numbers. The schematic can be divided into three strings of control viz. Battery (i.e. on battery side & past battery knife switch), local control (PA / NA string) & control (13T/4T string). The schematic shows the interfacing with the inverter cabinet (TCC1 & TCC2) and other third party. The Siemens schematic has been drawn by Siemens and is annexed to the EMD schematic. As indicated earlier, this schematic is meant largely for inverter and inverter control equipment, traction computer and traction motors. The schematic gives the details of the arrangement of GTOs along with other devices like anti parallel diodes, snubber capacitors and resistors etc. The protection circuits including the hard and soft crowbar circuits for protection of GTOs, have been shown in the schematic. The interface and connections to the SIBAS traction computer have also been shown. 14.15 Integration Of Electrics With Engine And Other Mechanical Systems The following mechanical aspects which are closely linked or interfaced with the electrics of the locomotive are Coupling of alternator with engine Torque requirement of the engine and starter motor requirement Engine cooling system interface with EM 2000 Engine cooling fan design and air circuit