GPS For Submersibles
advertisement

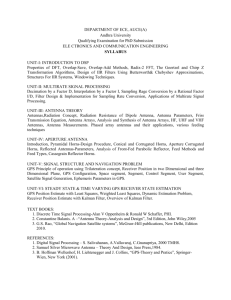
Global Positioning System (GPS) for Submersibles* Authored by: Marvin B. May Rodney A. Martin Bereket Tanju Robert A. Lopez, CAPT USN Representing: Applied Research Laboratory Pennsylvania State University 995 Newtown Rd. Warminster, PA 18974-2933 PMA/PMW 156 SPAWARSYSCOM 4301 Pacific Highway San Diego, CA 92110-3127 POC: Marvin B. May Applied Research Laboratory Pennsylvania State University 995 Newtown Rd. Warminster, PA 18974-2933 215-682-4003 mbm16@psu.edu Running Title: "GPS for Submersibles" Distribution Statement C: Distribution authorized to U.S. Government agencies and their contractors; Critical Technology, October 2003. Other requests for this document shall be referred to the Commanding Officer, SPAWARSYSCOM, 4301 Pacific Highway, San Diego, CA 921103127. Related Presentation given at “Emerging Military Capabilities Enabled by Advances in Navigation Sensors,” NATO Symposium, 14-16 October 2002. Istambul, Turkey * 1 ABSTRACT The operating environment of a Global Positioning System (GPS) is primarily thought of in the context of air, space, surface and land missions. This paper addresses the role of GPS in submersibles. More specifically, this paper addresses negative factors within the operational boundaries of the submersible GPS when compared to air/surface/land GPS, and mitigation actions that can be taken to reduce the impact of these factors. The distinctions for submersibles fall into the categories of: environmental, operational, mechanical, navigational and economic factors. Environmental factors include the air-water interface and the presence of significant ducting effects. Operational factors include sporadic fixing availability and the requirement for short exposure times. Mechanical considerations include the limited real estate for the antenna and radio frequency (RF) piping. Navigational aspects involve the availability of long endurance inertial navigators, atomic clocks, and time averaged mission performance accuracy criteria. Economic factors principally involve the minimal profit motivation for low volume production platforms. Potential accommodations to these unique submersible issues are provided in terms of existing and future system designs. 2 community. This lukewarm reception to the advent of GPS, combined with the inherent technical challenges, may have contributed to the fact that few special accommodations for the utilization of GPS in submersibles have been made. I. BACKGROUND Ironically, from a historical perspective, the original impetus for satellite navigation resulted from the needs of the submarine community. In the early 1960’s, the Polaris ballistic missile submarines required a worldwide, all-weather, high accuracy navigation positioning aid. The TRANSIT satellite navigation system was borne out of this necessity and was installed on Polaris submarines in 19641. It was a highly successful and also a classified program until 1968 when then Vice President Humphrey announced its availability to the general public. TRANSIT served as the principal inertial navigation fixing aid for most submarines until its decommissioning in 1996. The motivation for TRANSIT improvement programs began almost immediately, but did not stem principally from the submarine community. TRANSIT’s deficiencies with respect to proposed new satellite systems such as NOVA, TIMATION and 621B,2 were from the perspective of other users, not particularly from the submarine community. Availability of fixes on the average of about once every two hours was just fine for submariners whose motto it is to “run quiet, run deep”. It is important to realize that for submariners, satellite navigation has always been a navigation aid as opposed to a navigation source. Furthermore, knowing altitude is of course a moot point and velocity or attitude information could be adequately obtained from the inertial navigation system.3 The horizontal positioning accuracy of TRANSIT, typically about 75 meters radial root mean squared (rms) with perfect velocity aiding, degrading somewhat due to at sea inertial velocity Doppler compensation errors, was more than acceptable for virtually all submarine missions. Therefore, when the Global Positioning System (GPS) became a Joint Program Office for satellite navigation in 1974, there was marginal interest from the submarine II. OVERVIEW: UNIQUENESS OF GPS FOR THE SUBMERSIBLE In this section we delineate the unique aspects of submersible satellite navigation operation. Several of these are obvious but still justify stating because of their implications. The following sections expand, where necessary, on these aspects. We then proceed to discuss several potential accommodations, including hardware, software, system or operational approaches, which may be applicable to submersible operations. Attenuation of the GPS Signal The crux of the submersible uniqueness is the air-seawater interface that is encountered when the satellite signal is received by a submerged antenna4. Whenever an electromagnetic (EM) signal is incident upon a material with different dielectric properties, the wave is refracted. This is observed by looking at a branch coming out of the water. The branch almost seems “broken” at the air-water interface. Figure 1 illustrates a signal incident upon some dielectric with a relative permittivity different than that of air. The angle at which the signal hits the boundary with respect to the normal is the incident angle (i). Some of the energy is reflected away at the same angle (r). The remaining energy is transmitted into the dielectric at the transmission angle (t). The relationship between the incident and transmitted angles is governed by Snell’s law. 1 sin i 2 sin t (1) Where 1 is the permittivity of the dielectric space from which the EM signal is 3 approaching the interface and 2 is the permittivity of the dielectric upon which the signal is incident. Ts 2 2 cos i 2 cos i 1 cos t Tp 2 2 cos i 1 cos i 2 cos t (2) Where Ts is the transmission coefficient for Spolarized waves and Tp is the transmission coefficient for P-Polarized waves. The symbol represents the permeability of the material. In many cases, this value is the same as that for air. The properties of seawater are such that it has a relative permittivity (’sw) of 80.0 and a conductivity (sw) of about 4.3 Siemens/meter. The addition of the conductivity yields a complex permittivity (3) which is defined as follows: j sw sw sw Fig. 1 – Plane Wave Incident upon a Dielectric r j In this case, the dielectric is lossless. Therefore, the sine of the transmitted angle is real and the wave transmitted into the dielectric has uniform wavefronts, where the planes of constant phase and amplitude are parallel. sw (3) The value,, is the radial frequency of the signal. Since seawater has non-zero conductivity, it is considered a lossy dielectric. By examining the corresponding equations, we can see that Ts, Tp and t will be complex as well. The amount of energy transmitted into the dielectric from the incident signal is dependent on three things: the parameters of the dielectric, the angle of incidence, and the polarization of the signal. The polarization of the incoming wave is taken with respect to the incident plane, which is defined as the plane that contains both the direction vector of the incident wave and the normal to the surface of the interface. S-polarization (S is for senkrecht, which is German for perpendicular; Transverse Electric - TE) is when the electric field of the incoming wave is perpendicular to the incident plane. P-polarization (P for parallel; Transverse Magnetic - TM) is the case when the electric field is contained in the incident plane. The equations for the transmission coefficients (2) are given using the intrinsic impedance () of the two materials. Another property used to characterize a material is its wavenumber, k. This is used to characterize the propagating characteristics of a given wave in a material and is defined as follows: (4) k Since we will be dealing with complex values for the wavenumbers, we define the variable as follows: jkair air j air jksw sw sw j sw (5) j0 sw j sw Using this new variable, Snell’s law from (1) may be written as: 4 air sin i sw sin t j air sin t air sin i sin i sw sw j sw From (8), we can see that the transmitted field is not only attenuated at the surface, but it is non-uniform once it penetrates the seawater (6) We can now get the value of the cosine of the transmission angle and thus the values of the transmission coefficients. Figure 2 shows the decibel value of the transmission coefficients for an air-seawater interface for varying incidence angles. Fig. 3 – Plane Wave Incident upon Seawater surface. This is illustrated in Figure 3. The value,, represents the angle between the planes of constant magnitude (which are parallel with the interface) and planes of constant phase. It can be shown that the value of this angle is defined as: sin i tan 1 air (9) q Even for the case in which the planes are parallel (normal incidence, i = 0), the magnitude of the wave is attenuated by the lossy nature of the seawater. At normal incidence, the attenuation constant is expressed as: sw p Fig. 2 – Magnitude of Transmission Coefficients for S- and P-Polarized Electric Fields at Air/Seawater Interface We can see that even the best case (normal incidence), the signal encounters a 14 decibel loss from just above the interface. Another phenomenon that occurs once the signal enters the seawater is that the wave becomes non-uniform. Since the cosine of the transmission angle is now complex, we may express it as: cos t 1 sin 2 t 12 2 sw 1 sw 1 1 Np / m sw 2 (7) s cos j sin It can then be shown that the transmitted electric field is of the form: Etranse zp exp j air x sin i zq p s sw cos sw sin (10) The attenuation constants for the L1 and L2 frequencies are 86.877 and 109.024 Nepers/meter, respectively. The amount of attenuation is governed by the equation: A exp sw z (8) q s sw sin sw cos z depth (in meters) 5 (11) Figure 4 illustrates the decibel loss for both frequencies compared to depth. 3 inches in size. Figure 5 shows a typical commercial GPS antenna and a cutaway view of its contents. The actual antenna portion of Fig. 4 – Attenuation in Seawater vs. Depth From this graph, we can see just how rapidly the signal attenuates as the depth is increased. The signal level is reduced by over 350 decibels for both GPS bands in just one-half meter. This graph does not include the transmission coefficient losses and assumed a unit strength signal to start. This loss coupled with the loss encountered at the surface in addition to the non-uniform wavefronts encountered in seawater makes it very unlikely to be able to receive a coherent GPS signal at any appreciable depth. Fig. 5 – Typical Commercial GPS Antenna and Cutaway View the unit usually consists of a microstrip patch mounted on a dielectric substrate. It would be difficult to predict the effect of random water droplets on the outside of this casing. A worst-case scenario of the casing being completely covered with a layer of seawater will be examined. For this simulation, a computational EM program, IE3D, was used. The geometry used was a half-wavelength patch antenna mounted on a dielectric substrate with relative permittivity of 2.33. The frequency used was roughly the L1 band used in GPS, 1.58 GHz. An air gap was used to simulate the protective radome covering over the patch antenna. To account for the seawater coating, an additional superstrate layer was added with the electrical properties of seawater at varying thickness. Figure 6 illustrates this geometry. Effect of Residual Seawater Most GPS antennas are contained within a protective casing knows as a radome. This casing does not interfere with the antenna performance and provides a waterproof shell around the actual antenna. The actual size of the antenna is relatively small – anywhere from one to two inches square. The radome houses the antenna as well as a low-noise amplifier (LNA) and is usually 1 to 6 Even for one-eighth of an inch of seawater, the VSWR of the antenna is drastically changed. This shift in VSWR would represent a shift in the antenna’s resonant frequency. If we also examine the radiation patterns, we can see that the effect of the seawater layer is felt there as well. Figure 8 illustrates the phi and theta components of the radiated far field of the antenna for the three conditions mentioned above. Again, we see that with just a small amount of residual seawater, the radiation pattern is altered. Fig. 6 – Sample Geometry Used for Analysis The simulation was run at frequencies from one to two gigahertz to demonstrate the changing characteristics of the antenna. IE3D provides the radiating characteristics of the antenna; however, these can be used to characterize the receive properties of the antenna as well. Simulations were run for no, one-eighth inch (3.175 mm), and one-quarter (6.35 mm) inch seawater layers. The first characteristic of interest is the voltage standing wave ratio (VSWR) at the feed element. Figure 7 shows the effect of adding the seawater layer on the VSWR. Fig. 8 - Radiation Patterns of L1 GPS Antenna for Varying Seawater Layer Thickness The presence of the layer reduces the gain by approximately 10 decibels and, in the case of the theta component, also alters the shape of the radiation pattern. Fig. 7 – VSWR of L1 GPS Antenna from 1 to 2 GHz 7 One solution to reducing the effects of the residual seawater layer on the antenna would be to design the radome covering such that a very large percentage of the seawater “runs off” shortly after breaking the surface. This could be accomplished by using an inverted cone shape around the unit. Since it is transparent at GPS frequencies, the shape should not alter the receive properties of the antenna. If nearly complete clearing of the seawater from the radome is not possible, another possibility would be to design a GPS antenna array that could actively adapt itself to “look” between the residual droplets. This array would excite elements in a way to receive the signal from areas that do not contain seawater on the casing. However, even with an adaptive array, it would not be able to receive signals if the casing was completely covered. Electromagnetic Propagation Conditions (HEPC), ducting is almost always present over water between +/- 30 degrees latitude. Duct heights over water seldom reach 40 meters, and more typically are 25 meters or less. Based on the HEPC data, submersibles, due to their low antenna height, would be much more affected by ducting than surface ship, land or air assets. Analysis5 indicates that this would potentially enable relatively low power level beyond line of sight jammers to incapacitate submersible GPS receivers. Figure 9 shows, for a duct of 20 meter height, the required jammer power in dbW to jam a GPS receiver with a nominal J/S threshold of 30 db as a function of the range to the jammer. In this figure, the submarine’s antenna is 3 meters above the water and the jamming transmitter’s height is the vertical axis. Note how the required jamming power stays at low levels for long ranges when the transmitter is within the duct. Ducting A radiowave propagation effect that appears most applicable to submersibles is ducting. Ducting is a “waveguide” phenomenon due to refractive index gradients layered in the atmosphere and is primarily due to water vapor content and somewhat less dependent on local thermal inversions. The result is the propagation of a “waveguide-like mode” whose power decreases inversely with range rather than inversely with the square of range as in the case of free-space propagation. Ducting can provide an efficient means of propagation at L-band, and is generally observed over large bodies of water and less commonly over land as local terrain features tend to disrupt the layered refractive indices needed to propagate the waveguide mode. If a jamming transmitter is located in a duct, the energy becomes constrained to propagate in and below a trapping layer that is generally defined by thermal and/or moisture inversion, thus significantly extending the range of the jammer beyond what would be calculated from normal path losses. Based on Historical Time RMS Navigation Error The issue addressed in this paragraph is the steady state time RMS navigation error versus the instantaneous GPS fix accuracy. The submariner’s objective for many missions is to maximize time at depth. In general, this precludes continuous or frequent utilization of GPS fixes. The submarine’s navigation subsystem performance is often based on the time rms radial (horizontal) position error of its inertial navigation system. In general the error growth of the inertial navigator can be a complex combination of platform dynamics and the manner in which the sensor errors couple into the principal Schuler, diurnal and linear resonant error modalities. Consider as a simplification of the submersible’s inertial navigator’s error performance, the linear radial error growth with periodic GPS fixes as depicted in Fig. 10. This simplification would be relevant for long term error growth where the principal error driver would be the effective 8 Fig. 9 - Required jamming power for a -100 dBm receiver at 3 meters through a 20 meter duct between resets. The sensitivity of the Time RMS error to GPS accuracy can be examined with R and T as parameters. Clearly for the product RT small compared to G, then the Time RMS Error would be equal to G and for RT very large compared to G, the Time RMS Error would have a small dependency on G. An order of magnitude number for RT for a submarine would be one nautical mile and a representative number for G would be 0.005 nmi. Consider the case of T=10 days and R=1.0 nmi/day. Then the time rms error changes from about 5.77 to 5.82 nmi as the GPS error changes from 0.005 to 0.05 nmi. Thus even a 10 fold increase in GPS error has a relatively small change in the time rms error. Figure 11 shows the Time Rms Error with GPS radial error on the abscissa parameterized versus different combinations of R and T. Fig. 10 - Steady State Simplified Submarine Navigator Error Growth polar gyro drift rate bias. For this error growth the time rms error would be: Time RMS Error G 2 GRT R 2T 2 / 3 (12) In equation (12), G would be the nominal GPS error (assuming the INS reset Kalman Filter essentially tracks the GPS), R would be the assumed linear error growth of the inertial between GPS resets and T is the nominal time To some extent, the lack of sensitivity to GPS error explains the original reluctance of submariners to adopt GPS over TRANSIT based on GPS’s improved accuracy. 9 Receiver Initialization-Time to First Fix The covert nature of submersible operations dictate that antenna exposure time should be minimized. In this section we discuss some attributes that a submarine may utilize to reduce exposure time. For clarification, we define the following processes associated with initialization6: a. The search time for a conventional receiver is the time required to achieve carrier and code lock. Normally this is dominated by achieving carrier and code lock on the first satellite to be acquired. Fig. 11 - Time RMS Navigation Error This unique lack of sensitivity to GPS error enables one to consider strategies which may be beneficial to operations. One possibility is the relaxation of the software requirement in most GPS receivers to have current ephemeris available before proceeding with a fix. The Control Segment’s ability to predict and extrapolate GPS ephemeredes over long intervals such as a submarine’s mission duration has improved dramatically. For submersibles/stealthy participants a cryptonet could be created whereby extrapolated satellite ephemerides would be available to a much better accuracy than the present ephemeris format. For instance, presently, the actual ephemerides are uploaded to the satellites using the Extended Range Orbital Messages several months in advance. Whatever specific methodology might be adopted, the Control Segment’s ability to predict ephemerides (including clock and atmospheric errors) is excellent now over several months. We can probably meet the navigation performance requirements of some classes of submersibles by virtue of their having extended ephemerides pre-mission dockside. This would often obviate the need for lengthy ephemeris data collection thereby enabling quick fixing and therefore more covertness. b. The exposure time is the time that the satellites must be in view of the antenna for a fix to be obtained. These should be distinguished from time to first fix for a GPS receiver which would normally include factors such as acquisition and declaration of track for multiple satellites, bit synchronization, message synchronization /collection, measurement processing and Kalman filter fix convergence. In the case of a conventional GPS receiver (as opposed to a storage type receiver described below), the exposure time must be equal to or greater than the search time, while, for the case of a storage receiver, exposure time represents the signal collection interval: the search can continue after the data collection interval by recirculating the stored signal. For a conventional receiver, the search process for the P/Y code acquisition must be done while the antenna is exposed. Due to the very low repetition-rate-to-bandwidth ratio of the P/Y code, direct acquisition times, can be prohibitive. Each search must be performed for every possible code phase/frequency uncertainty bin. Submersibles should have an 10 advantage, due to their low dynamics, over other platforms with respect to the number of bins that must be searched. Unfortunately, present submersible GPS receivers, are often not programmed to take advantage of this. Most importantly with respect to Direct Y acquisition, is the availability of atomic clocks on some submarines. The principle factor in the number of bins to be searched is the initial time uncertainty with a lesser dependency on the position dependency. For example, a user clock uncertainty of one millisecond (random, -one sigma zero mean Gaussian bias) and an additive user to satellite range uncertainty of 30000 meters (random independent one sigma Gaussian bias) would result in a 3-sigma (99%) search region of 10050by2by2by3=120,600 bins. If, for example, a submarine with an atomic clock and a high quality inertial navigator had uncertainties of 10 microseconds and 300 meters respectively, then the number of discrete code bins to be searched would be reduced to 101by2by2by3=1212 bins, with, for a conventional receiver, a proportionate reduction in search time. Similar considerations apply for the search with respect to frequency whereby the high quality inertial velocities and superior frequency stability (partially due to the generally low dynamics of a submarine) often should reduce the frequency search space to a few frequency windows, where a frequency window size would be nominally 0.442/Tc, and Tc being the predetection interval, nominally 1-20 milliseconds. Fig. 12 - Typical Submarine Antenna Configuration GPS receiver (AN/WRN-6), Antenna Electronics (AE-4), attenuator, cabling/slip rings/multiplexer, antenna RF pre-amplifier and antenna. The antenna is typically a small (under 5”) patch antenna, which is designed to fit within the space allowed. The standard FRPA-GP antenna, which is utilized for surface ship applications, is not appropriate for submarine installation due to watertight requirements and size constraints. As a result, new antenna configurations were developed and designed for submarine applications. The antenna fits inside a pressure and waterproof dome. This dome must shed water quickly and be transparent to GPS frequencies. The connection to the GPS receiver is via a single RF cable which is multiplexed with up to 4 other signals as well as DC power. A typical GPS antenna and radome on a submarine antenna mast is in close proximity to other antennas that are transmitters. This proximity requires sufficient shielding and protection from the high power signals that are present in the antenna mast. The antenna electronics (AE-4) usually is collocated with the GPS antenna. For submarines, the AE-4 could not be located within the antenna assembly (due to size, shock, environmental and EMI requirements constraints) thus requiring the use of a small pre-amplifier. A pre-amplifier is used to amplify the entire received RF from the Antenna Considerations The potential vulnerabilities of GPS have been well documented. In general, the first line of defense against GPS jamming is an improved antenna. Many Navy surface ships are now being equipped with Controlled Reception Pattern Antennas (CRPAs)7. Figure 12 is a typical configuration for fast attack submarines, consisting of a standard shipboard 11 “recirculated” in non real-time among the correlator resources. Instead of having to slew the correlator resources in resources in real time to the incoming signal until synchronization is achieved, the storage receiver can “recirculate” the wideband signal in post time without requiring further signal collection. Thus the storage receiver could reduce exposure time for those platforms for which stealthiness is a premium (Fig. 13) Since, at least theoretically, the signal can be “recirculated” forever, the storage concept guarantees an “eventual” acquisition within the given exposure time. The technique can be made complementary to massively parallel correlator techniques.10 antenna to overcome the system losses from extended cable lengths, multiplexers, slip rings, splitters and switches. The attenuator is needed to return the signal strength to a level that is compatible with the AE-4. The AE-4 converts the total RF into two Intermediate Frequencies (IF) for input into the AN/WRN-6. There are typically two or more antenna masts that contain a GPS antenna and pre-amplifier. A selector switch is included in the installation to choose the antenna that will be used for GPS operations. The present configuration points to the difficulties that may be encountered in accommodating an antenna/antenna electronics with special AJ properties such as a CRPA. These include small real estate for multiple elements, inability to handle multiple RF piping connections from CRPA antenna elements to antenna electronics, cosite/interference effects and multiplexing considerations. The Office of Naval Research Code 31 is supporting two submarine antenna developments which will be addressing these issues. III. NON-CONVENTIONAL APPROACHES In this section, we identify four nonconventional approaches to obtaining GPS on a submersible. Fig. 13 - Storage GPS Receiver Figure 14 exemplifies the theoretical advantage of COGNaC with respect to exposure time to achieve a Direct Y acquisition for a nominal initial clock uncertainty of 1 second. For this large time uncertainty, only the storage receiver enables viable exposure times, although at the expense of post exposure data processing time. For smaller initial time uncertainties, the storage receiver has less of a relative exposure time advantage over conventional receivers, but would still have Covert GPS Navigation Capability The first approach is a COGNaC,8,9 (Covert GPS Navigation Capability), or storage type of receiver. In conventional GPS receivers, the acquisition process must occur in real time, implying that the signal must always be available in real time. This furthermore means that the antenna must be exposed during the lengthy code acquisition process. The storage receiver provides an alternate strategy. By storing the broadband signal, the signal can be 12 Fig 14 - Theoretical Direct Y Search Time to First Satellite Fix some AJ advantages by virtue of its ability to reprocess data. The antenna was originally intended to have a GPS antenna capability. The Applied Physics Laboratory (APL) has also been developing a Trailing Wire GPS Antenna. Although these will potentially enable GPS at depth, they have the disadvantage of being indelibly tied to the trailing wire and also have severe real estate issues. APL has conducted several at-sea tests. Currently they are examining the results and developing a plan for future development. Buoyant Cable Array Antenna or Trailing Wire GPS Antenna DARPA has been engaged in developing a buoyant cable antenna principally for high data rate two way submarine communications at depth (Fig. 15). Recoverable Tethered (RTOF) System Optical Fibre The United Kingdom’s Defense Evaluation and Research Agency (DERA) is developing an interesting variation on the trailing wire antenna designated the Recoverable Tethered Optical Fibre (RTOF).11 In this mechanization, a winch lets out the antenna assembly at a speed proportional to the submarine’s speed (Figure 16). This minimizes the relative velocity of the antenna with respect to the Fig 15 - Buoyant Cable Array Antenna 13 water, thereby reducing the wake induced by the antenna. The buoy would know its GPS position at the surface and the difference between the submarine’s inertial navigator position changes since launch and the buoy’s inertial navigator position change since launch would enable precise positioning of the submersible. This proposed task would investigate buoy deployment techniques, buoy design particularly with respect to its GPS receiver, GPS antenna and inertial navigation complement. Small avionics class inertials such as the GGP will be considered for incorporation in the buoy. The potential for propulsion within the buoy to return it to the submersible may be considered for ultimate accuracy since this would allow a smoothing estimation of the buoy’s inertial errors. Fig 16 - Recoverable Tethered Optical Fibre (RTOF) GPS Acoustic Ranging Net (GARN) Submersible Underwater Receiver (SUGAR) GPS Aided This technique entails the deployment of a net of GPS surface buoys above the area that the submersibles would transit (Fig. 18). The GPS The Submersible GPS Antenna Receiver (SUGAR)12 (Fig. 17) involves sending out one buoy and using an avionics-class inertial navigator within the buoy to constantly keep track of the vector separation between the submarine and the buoy. Fig. 18 - Expendable Buoys with GPS buoys are, of course, self navigating and effectively establish an upside down long baseline transponder net. By acoustically ranging between the net of GPS buoys and the host platform, a continuous precise underwater position reference is established. The technique could be employed either with an upward or downward flow of acoustic data. With the Fig. 17 - Submersible GPS Antenna Receiver (SUGAR) 14 upwards acoustic flow of data, the tracking principle is based on measuring, on the set of buoys, the time of arrival (proportional to range) of an acoustic pulse sent by the mobile platform. Knowing the sound velocity, distances from the buoys to the mobile platform can be calculated. With an adequate number (typically 2 to 4, depending on geometry and whether the mobile platform’s depth could be telemetered up) of surface buoys, the location of the mobile can be determined by some centralized processor which communicates with all the buoys. This concept is analogous to the GPS Intelligent Buoy which is marketed and patented (US Patent: N: 5.579.285) by a French company13. With a downward flow of acoustic data, the mobile platform receives coded acoustic signals from each of the buoys. The equipment aboard the submersible has an architecture similar to a GPS receiver but implemented in the acoustic domain. Knowing the speed of sound and measuring the acoustic pseudoranges to multiple buoys enables the submersible to calculate its own position. This technique is discussed in US-AF Youngberg of the US-Air Force (US Patent N:5.119.341). V. CONCLUSIONS The fundamental unique aspects of utilizing GPS for submersibles have been highlighted. They include: a) the air-water interface b) the availability of high accuracy clocks and inertials c) low dynamics d) unique antenna constraints and e) a fundamental mission conflict with exposure. These considerations have been examined within the context of the overall lack of large numbers of platforms to sufficiently influence manufacturers to address the unique requirements. Although present submersible GPS equipment and techniques are virtually identical to ships, we describe several techniques that have potential submersible applicability. Ultimately, in the absence of a port to port inertial navigator, geophysical navigation14 or acoustic 15 transponder techniques can be used to complement GPS. VI. References 1. May, M., Institute of Navigation Newsletter, Spring 1999. 2. Parkinson, B.W., et al, "A History of Satellite Navigation," Journal of the Institute of Navigation, Volume 42, Number 1. IV. ECONOMIC CONSIDERATIONS A major factor that has impeded the incorporation of new specialized GPS equipment on submarines is the simple fact that there are not enough submarines to justify the development cost. Currently, there are less than 60 fast attack submarines and 14 ballistic missile submarines in the United States Navy fleet. The economic reality is there is marginal incentive for R&D on a product that will only be used on less than 100 platforms. The burgeoning applications for Unmanned Underwater Vehicles may provide further profit potential. 3. May, M.B., "Inertial Navigation and GPS," GPS World, September 1993. 4. Collin, R.E., "Antennas and Radiowave Propagation," McGraw-Hill, Inc., New York, 1985. 5. Fast, S.A., Young, G.S., Bode, J.N., and Pelman, K.E., "A Three-Dimensional Matching Method for Tropospheric Features," Radio Science, Vol. 35, No. 5, pp. 1065-1073, September-October 2000. 6. May, M.B., Brown, A., Tanju, B., "Applications of Digital Storage Receivers for 15 Enhanced Signal Processing," ION GPS '99, September 1999. 7. Falchetti, C., Abriel, J. “GAS 1 Evaluation for Navy Ships: DT-B1 Test Report”, April 2002. 8. Thompson, T., Doherty, M, “Data Logging GPS Receiver”, GPS ION, September 1994. 9. Tanju, B., “Covert GPS Navigation Capability”, Naval Air Development Center presentation, 19 October 1993. 10. Aein, J. M., “Clock, Correlator, and Inertial Measurement Unit Technology for SpreadSpectrum Communications”, MR-747DARPA, 1997. 11. Lambert, J., CAPT USN, "Recoverable Tethered Optical Fibre System," update to DSTL Winfrith, 28 Nov 2001. 12. ARL/PSU NRDC/SPAWAR System Center Proposal to ONR BAA “Submersible Underwater GPS Receiver”, March 2000. 13. Advanced Concept and System Architecture, http://www.underwater-gps.com 14. Ringlein, M., May, M. B., Barnett, N., “Next Generation Strategic Submarine Navigator”, AIAA Aerospace Transaction, November 2000. 15. May, M.B., "Long Endurance GPS Inertial Transponder (LEGIT)," Patent Application, July 2003 16 Fig. 17 - Submersible GPS Antenna Receiver (SUGAR) VII. LIST OF FIGURE CAPTIONS Fig. 1 - Plane Wave Incident upon a Dielectric Fig. 18 - Expendable Buoys with GPS Fig. 2 - Magnitude of Transmission Coefficients for S- and P- Polarized Electric Fields at Air/Seawater Interface Fig. 3 - Plane Wave Incident upon Seawater Fig. 4 - Attenuation in Seawater vs. Depth Fig. 5 - Typical Commercial GPS Antenna and a Cutaway View Fig. 6 - Sample Geometry Used for Analysis Fig. 7 - VSWR of L1 GPS Antenna from 1 to 2 GHz Fig. 8 - Radiation Patterns of L1 GPS Antenna for Varying Seawater Layer Thickness Fig. 9 - Required jamming power for a -100 dBm receiver at 3 meters through a 20 meter duct Fig. 10 - Steady State Simplified Submarine Navigator Error Growth Fig. 11 - Time RMS Navigation Error Fig. 12 - Typical Configuration Submarine Antenna Fig. 13 - Storage GPS Receiver Fig. 14 - Theoretical Direct Y Search Time to First Satellite Fix Fig. 15 - Buoyant Cable Array Antenna Fig. 16 - Recoverable Tethered Optical Fibre (RTOF) 17 VIII. BIOGRAPHIES Bereket Tanju Marvin B. May Bereket Tanju serves as the Assistant Program Manager for GPS Modernization for the Navigation Systems Program Office (PMW/A-156) at Space and Naval Warfare System Command (SPAWAR) in San Diego CA. He is responsible for the execution of the U.S. Navy Navigation Warfare and GPS Modernization program. Among his specialties is covert GPS navigation. Marvin B. May is the Chief Navigation Technologist at ARL Penn State’s Navigation Research and Development Center in Warminster, PA. He also manages their Navigation Education Program. He has a BSEE from City College of NY and a Masters Degree from New York University, doctoral courses at Polytechnic Institute and is a Professional Engineer. He is an adjunct professor at several universities and teaches Master’s Degree navigation courses for the Penn State Great Valley Graduate Center. He is a recognized navigation specialist with expertise in GPS, inertial and geophysical navigation. During his Navy career he has worked at the Navy’s Navigation Laboratory of the Naval Command, Control and Ocean Surveillance Center (NCCOSC), and his experience includes eight years as chief analyst for GPS responsible for satellite navigation systems analysis, laboratory testing and integration issues. May has served as Chairman of the Greater Philadelphia Chapter, the National Marine Navigation representative, and is Historian of the Institute of Navigation. Robert A. Lopez, CAPT USN Captain Robert A. Lopez serves as program manager for the Navigation Systems Program Office (PMW/A-156) at Space and Naval Warfare System Command (SPAWAR) in San Diego CA. His responsibilities include the planning, coordination, management and technical direction for the design, development, and Fleet introduction of a wide range of hardware and software products in support of improvements to GPS navigation applications for US Navy aircraft, ships, submarines, land vehicles and handheld GPS systems. His previous assignments include serving as deputy program director for SPAWAR’s Intelligence, Surveillance, and Reconnaissance Directorate (PD- 18) and as deputy program manager for Mobile Surveillance Systems (PMW- 182). Rodney A. Martin Rodney A. Martin received his B.S. and M.S. degree in electrical engineering from the Pennsylvania State University, University Park, in 1999 and 2001, respectively. Since 1998, he has been with the Applied Research Laboratory at Pennsylvania State University, involved in the development of a Java-based suite of antenna models, conformal antenna analysis software, urban RF propagation analysis, and fractal antenna engineering. His research interests include conformal antennas, numerical methods, and computational electromagnetics. 18