Rigid Body Motion
advertisement

Question 8: Rigid Body Motion
The following moments of inertia are given on page 53 of the log tables and we also need to prove some of
these relationships.
Relevant formulae:
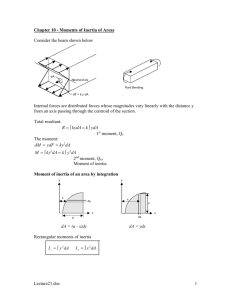
Moments of Inertia
md2
Point mass
Uniform rod, length 2l
Uniform lamina, length 2l
Uniform disc, radius r
Uniform hoop, radius r
Uniform solid sphere, radius r
About axis through centre perpendicular to rod
1
/3 ml2
About axis at one end perpendicular to rod
4
/3 ml2
About axis through centre in the plane of the lamina
1
/3 ml2
About axis along one end in the plane of the lamina
4
/3 ml2
About axis through centre perpendicular to disc
1
/2 mr2
About a diameter
1
/4 mr2
About axis through centre perpendicular to hoop
mr2
About a diameter
1
/2 mr2
About a diameter
2
/5 mr2
The centre of gravity of a triangular lamina is on a line on a bisector and is one third up from the base.
Compound Objects
It just happens to be the case (fortunately) that the moment of inertia of a system made up of several
simple parts about a particular axis is simply the sum of the individual moments of inertia (about that
axis).
So for example to calculate the moment of inertia of the system on the right about point A, simply
add together the moment of inertia of the rod about A and the moment of inertia of the disc about A.
1
The Parallel and Perpendicular Axes Theorems
Perpendicular Axis Theorem:
If X, Y and Z are mutually perpendicular axes through a point in a lamina, with X and Y lying in the plane of the
lamina, then Iz = Ix + Iy, where these represents the moments of inertia about the respective axes.
Diagram:
Z
X
Y
Parallel Axis Theorem:
If Ic is the moment of inertia of a rigid body of mass m about an axis through its centre of gravity, I is the moment of
inertia of the body about a parallel axis and d is the distance between these two axes, then
I = Ic + md2.
d
Diagram:
Ic
NB:
Note the Ic part of this – you must use the moment of inertia through an axis passing through the centre of gravity
of the object, no matter how tempting it is to use another axis (you’ll still make this mistake but at least now I can say
I told you so.)
The Parallel Axis Theorem must include an axis
passing through the centre of gravity of the object
2
Find the moment of Inertia of each of the following objects, about the point specified
Tips
Label each rotation as one of the following two options.
1. A spin (the axis is "perpendicular to the plane", like a nail into the page).
Here the object spins in the plane of the page.
2. A flip (because the axis is “along the plane” like a ruler lying on the page).
Here the object flips out of the page.
Rule:
If the axis is not touching the object then you need to use the Parallel Axis Theorem
Rod
2006 (b) , 1993 (b), 1999 (b)
Disc
1973, 1996 (b), 1989 (b), 2001 (b) 1971
Lamina
2011 (b) 2007 (b) 1990 (b) 1975
1995 (b)
Compound Objects
The moment of inertia of a system made up of several simple parts about a particular axis is simply
the sum of the individual moments of inertia (about that axis).
So for example to calculate the moment of inertia of the system on the right about point A, simply
add together the moment of inertia of the rod about A and the moment of inertia of the disc about A.
Rod and Point Mass
2005 (b)
Rod and Disc
No questions in last 10 years.
Miscellaneous Compound Objects
2009 (b) 2003 (b) 1988 (b)
Annulus
2010 (b), 2002 (b)
3
Introduction
If an object is moving from one place to another the kinetic energy involved is known as translational
energy (EK) and is represented by the term ½ mv2
If instead the object is rotating about a fixed axis then the kinetic energy involved is known as rotational
kinetic energy (ER) and is represented by the term ½ I 2
(Technically they’re both kinetic energy but we’ll ignore that
axis
for now).
To derive the expression ER = ½ I 2
Start with the usual expression for translational kinetic
energy: Ek = ½ mv2
But the kinetic energy of the object is simply the sum of the
kinetic energy of all the small parts.
We represent this as follows:
r
I = m r2
Ek = ½ dm v2
dm
{dm (short for “delta m”) means “a very small mass m” and
(short for “sigma”) means “the sum of”}
But v = r
Ek = ½ dm r2 2
It turns out that the term dm r2 represents how difficult the object is to rotate about an axis and
because it is of such significance it is given its own name – the moment of inertia.
I = moment of inertia and represents how difficult it is to turn the object.
Ek = ½ I 2
The mass m of an object is a measure of how difficult it is to accelerate that object.
Similarly the moment of Inertia I of an object is a measure of how difficult it is to rotate that object.
Not surprisingly, the two factors that the moment of inertia of an object depend on are
1. the mass of the object and
2. the distance between the object and the point or axis of rotation.
In this chapter we focus on how difficult it is to rotate a variety of shapes. Most of them are twodimensional, yet still have a mass. It may strike you as unusual that a 2-D shape can have a mass, but there
you go. In Applied Maths we like to first simplify things as much as we can and only afterwards do we
worry about the real world.
Reminds me of the story of the physicist who believed he could solve all the world’s economic problems.
When asked how he would go about this he replied: “Easy. First, imagine all the world’s economic problems
to be a perfect circle . . .”.
There are actually a lot of real-world applications to figuring out how difficult it is to rotate an object. For
example if you are designing a door for an aircraft you need to make sure that it can be opened by a typical
person. So you could either take the Engineering approach, which is to first build the door and then test it, or
you could try to mathematically work out in advance how difficult a given design would be to open and then
compare it with known values of what the average human can deal with.
4
Introduction to Derivations
20 marks
The two most common questions that get asked are as follows
1. Prove that the moment of inertia of a uniform rod of mass m and length 2l about an axis through its
centre perpendicular to the rod is ⅓ ml2.
2. Prove that the moment of inertia of a uniform circular disc, of mass m and radius r, about an axis through
its centre perpendicular to its plane is ½ mr2.
Seven Steps
The problem uses the general expression for the moment of inertia of an object as I = dm r2 and applies it
to the particular shape in question.
The key here is to find an expression for dm for the shape in question, and to use appropriate limits.
1. Define = Mass/Length or Mass/Area.
{This is just like defining density as Mass/Volume – no reason why we can’t do it here}
2. This implies Mass = (Length) or Mass = (Area).
Now find an expression for Area (of a rectangle or circle).
Set this aside and only use it again at the very end.
3. dm = (dx) or (dA)
{dx represents a small distance and dA represents a small area}
4. Now you find an expression for dA
{the area of a small part of the rectangle or the disc (if the shape is one dimensional this step is
unnecessary)}
5. Now substitute in to the general expression I = dm r2; we assume that the lengths become infinitely
small so we use the following notation:
becomes ∫
r2 becomes x2
is a constant and so stays outside the integration sign
6. Integrate, using appropriate limits. Note how the limits change for a circle – can you see why?
7. Finally use the substitution = Mass/Length or Mass/Area (from point number one above) to lose and
introduce m.
5
Prove that the moment of inertia of a uniform rod of mass m and length 2l about an axis through its centre
perpendicular to the rod is ⅓ ml2.
Prove that the moment of inertia of a uniform square lamina, of mass m and side 2a, about an axis through
its centre parallel to one of its sides is ⅓ ma2.
Prove that the moment of inertia of a uniform circular disc, of mass m and radius r, about an axis through its
centre perpendicular to its plane is ½ mr2.
Part ‘a’s
State the Parallel and Perpendicular Axes Theorems. 2001 (b) 1980 (a) 1979 (a)
Moment of Inertias
Disc
2012 (a) 2010 (a) 2008 (a) 2004 (a)
Rod
2009 (a) 2006 (a) 2005 (a) 2003 (a)
Lamina
2011 (a) 2007 (a)
Part ‘b’s
Periodic Time
The periodic time is the time a pendulum would take for one complete oscillation (over and back again).
A simple pendulum consists of a point mass hanging from a very light string.
A compound pendulum consists of a two-dimensional object which may or may not be composed of more
than one part.
Formula for periodic time
Simple Pendulum
Compound Pendulum
I
M
total moment of inertia
Mass of the system (a very common mistake is for students to leave this as m e.g. if the mass of the
system is 3m then substitute 3m for M in the formula above.)
h
The distance from the centre of gravity of the system to the axis.
The best way to find this distance is to put the system on its side and use the fact that the sum of
the individual moments equals the moment of the entire object.
6
Find the length of the compound pendulum that corresponds to the minimum periodic time.
1. Square T
2. Calculate dT2/dx (you may need to use the chain rule).
3. Let this expression equal 0 and solve to find x.
Find the periodic time of the equivalent simple pendulum
Compare the equation
to the equation for a simple pendulum
and solve.
Note: the part b’s can be sub-divided into two types of problem
1. Find periodic time T
2. Find angular velocity
When looking over these questions begin by identifying the questions as either Type 1 or Type 2.
Before doing anything else make sure that you can work out the moment of inertia for the object in
each question below.
Periodic Time: Exam Questions
2003 (b)
Angular Velocity
(R.E. + P.E.) at the beginning = (R.E. + P.E. ) at the end
The formula for Potential Energy (P.E.) is mgh
The formula for Rotational Energy (R.E.) is ½ I2
h represents the distance from the base-line to the centre of gravity of the object.
You will need to have separate mgh’s for each part, even though we can use a moment of inertia for entire
object.
Where do you choose your base line?
Ans: Your base line should run through the centre of gravity of the lowest particle in the question.
You will notice that the Department of Education solutions use ‘Loss of Potential Energy = Gain in Kinetic
Energy’.
I suggest that you say ‘Total Potential Energy plus Total Rotational Energy at the beginning = Total
Potential Energy plus Total Rotational Energy at the end.
It’s a little longer but you’re less likely to leave out a part.
If asked to find the linear speed at a specific point you must use the relationship v = r.
r is the distance from the fulcrum to the point in question. Be careful not to assume this to be just r; e.g. if
the fulcrum is at one point on the circumference of a disc and the point in question is at the other end of the
diameter then in this case for the formula v = r the r becomes 2r.
7
How to go from K.E. = ½ mv2 to R.E. = ½ I2
1998 (b) 1975 (b)
A lamina is rotating with angular velocity ω about an axis perpendicular to its plane.
If the moment of inertia of the lamina about the axis is I, prove that the kinetic energy is ½Iω2.
Angular Velocity Exam Questions
2006 (b) , 2005 (b) , 2009 (b)
Angular Velocity plus Periodic Time Exam Questions
2011 (b), 2007 (b)
In these questions the disc loses potential energy but gains kinetic energy
(this kinetic is in two forms: translational energy (½ mv2) and rotational energy (½ Iω2)
None in last 10 years.
In these questions the particle(s) lose(s) potential energy and the pulley gains rotational energy
2004 (b) 2008 (b) 2012 (b)
Annulus
2010 (b)
8