Stress Analysis of a Chicago Electric 4½ Angle Grinder
By
Khalid Zouhri
A Project Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
In Partial Fulfillment of the
Requirements for the degree of
MASTER OF MECHANICAL ENGINEERING
Approved:
_________________________________________
Dr.Ernesto Gutierrez-Miravete, Project Adviser
Rensselaer Polytechnic Institute
Hartford, CT
March, 2010
(For Graduation August 2010)
1
© Copyright 2010
by
Khalid Zouhri
All Rights Reserved
2
Table of Contents
1. Problem Statement................................................................................................................................ 3
1.1. Photos of the Device, Subassembly, and Components...................................................................... 3
1.2. Given and Measured Data ................................................................................................................. 9
1.2.1. Given Data ..................................................................................................................................... 9
1.2.2. Measured and Calculated Data...................................................................................................... 10
1.2.3. Schematic Drawing ........................................................................................................................15
2. Force Analysis .....................................................................................................................................15
2.1. Free Body Diagram of Shaft .............................................................................................................15
2.2. Gear Force Calculations: ..................................................................................................................16
2.3. Shaft Force Calculations: ................................................................................................................. 17
2.4. Shear Force and Bending Moment Diagrams ..............................................................................….19
3. Stress Analysis ............................................................................................................................... ….20
3.1. Bending Stress and Bending Factor of Safety ..................................................................................20
3.2. Wear Stress and Bending Factor of Safety .......................................................................................22
4. Stress Analysis of Output Shaft...................................................................................................................24
4.1. Shaft Force Calculations Using Vector Cross Product ........................................................................…24
4.2. Static Factor of Safety Calculations for Shaft ..........................................................................................25
4.3. Fatigue Factor of Safety Calculations ......................................................................................................26
5. Finite Element of Output Shaft ...................................................................................................................27
5.1. Loads and Restraints Setup ......................................................................................................................27
5.2. COSMOS Stress Analysis ........................................................................................................................28
6. Discussion ...................................................................................................................................................30
7. References ...................................................................................................................................................31
3
List of Figures
Figure 1: Chicago Electric Angle Grinder ............................................................................................... 3
Figure 2: Complete Component Assembly .............................................................................................. 4
Figure 3: Bevel Pinion in Gear Casting Subassembly ............................................................................. 4
Figure 4: Bevel Gear in Gear Casing Subassembly ................................................................................. 5
Figure 5: Component Subassembly without Gear Casing ........................................................................ 5
Figure 6: Shaft with Bevel Pinion Gear Removed ................................................................................... 6
Figure 7: Shaft with Bevel Pinion Gear..................................................................................................... 6
Figure 8: Bevel Pinion ...............................................................................................................................7
Figure 9: Components in Position .............................................................................................................7
Figure 10: SolidWorks Model Assembly ..................................................................................................8
Figure 11: SolidWorks Assembly Exploded..............................................................................................8
Figure 12: Components Analyzed Exploded............................................................................................. 9
Figure 13: ME-2 Rockwell Hardness Testing System .............................................................................10
Figure 14: Hardness Testing for Shaft .....................................................................................................10
Figure 15: Hardness Testing for Bevel Pinion......................................................................................... 11
Figure 16: Pinion Close-up with Reference Lines .................................................................................. 14
Figure 17: Schematic Drawing ............................................................................................................... 15
Figure 18: Free Body Diagram of Shaft ................................................................................................. 15
Figure 19: Pinion- Bevel Schematic ....................................................................................................... 16
Figure 20: Force Analysis 2-D Planes ................................................................................................. .. 17
Figure 21: Load, Shear Force, and Bending Moment Diagrams ............................................................ 19
Figure 22: Restraints at Bearing D ................................................................................................................ 27
Figure 23: Restraints at Bearing C .................................................................................................................27
Figure 24: Loads at Pitch Point Applied Using Remote Load ...................................................................... 28
Figure 25: Shaft with Constraints and Loads and Study Run ....................................................................... 28
Figure 26: Probe Value of Maximum Stress ...........................................................................................….. 29
4
Table of Tables
Table 1: Manufacturing Specifications ................................................................................................. 9
Table 3: Hardness Testing Results ....................................................................................................... 11
Table 4: Hardness Conversion Chart. ................................................................................................... 12
Table 5: AGMA Strength Graph for Gears............................................................................................ 13
Table 6: Data of the gear and Shaft........................................................................................................ 14
5
Abstract:
The Electromechanical device Chicago 4.5 inch angle grinder used in many different applications.
The device use two gears, a bevel pinion gear and spiral pinion gear, the spiral bevel gear attached into
the shaft and two other bearing, all of the component turn with electrical motor. The study on this
project is to investigate the stress analysis on bevel pinion gear and shaft using the standard hand
calculations and finite element analysis (FEA) using the COSMOS software. The purpose of this
project is to give global idea about all the stress analysis that apply on the shaft and gear during the
mechanical work of the device.
6
1. Objective
The purpose of this Engineering Project is to perform the stress analysis of the electromechanical device
Chicago 4.5 inch angle grinder ITEM 91223-1VGA (Figure1). The grinder utilizes spiral bevel gears whose
output angular velocity (ω) is 11,000 rpm. The first component I will analyze is the spiral bevel pinion gear
.This pinion gear is directly coupled to the rotor shaft of the electric motor and supplies torque to the
accompanying spiral bevel gear which is closed coupled to the output shaft. The pinion gear is held onto the
end of the rotor shaft by a nut which forces the pinion against one of the two shaft bearings .The second
component I decided to analyze is the rotor shaft of the electric motor.
1.1
Photos of the Device, Sub assembly, and Components
Figure 1 show the Mechanical device tool “Chicago Electric angle grinder “ ITEM 91223-1VGA
Figure 1: Chicago Electric Angle Grinder
7
Figure 2 show the complete component assembly (motor, shaft, bearing, bevel gear casting)
Figure 2: Complete Component Assembly
Figure 3 show the bevel pinion gear inside the gear casing.
Figure 3: Bevel Pinion in Gear Casting Subassembly
8
Figure 4 show the bevel gear casing.
Figure 4: Subassembly of gear Casing
Figure 5 show the two gears on the Grinder device, bevel pinion gear and bevel gear.
Figure 5: Component Subassembly without Gear Casing
9
Figure 6 show one part of the assembly, bevel pinion gear removed for hardness test
Figure 6: Shaft with Bevel Pinion Gear Removed
The picture bellow shows the shaft with bevel pinion gear.
Figure 7: Shaft with Bevel Pinion Gear
10
Figure 8 show the bevel pinion gear separated from the assembly device.
Figure 8: Bevel Pinion
Figure 9 show the shaft with bevel pinion gear and bevel gear in position.
Figure 9: Components in Position
11
1.2 Given Data
Table 2 show the Nomenclature with givens and unknowns symbols using in this project.
Symbol Definition
b
Tooth width (mm) or (in)
davg
Avg. diameter of pinion (mm) or (in)
dout
Outside diameter of pinion (mm) or (in)
FS
Factor of Safety
Fa
Axial (thrust-bearing) load (N) or lbf
Fr
Radial (separating) load (N) or (lbf)
Ft
Tangential (torque-producing) load (N) or (lbf)
Kv
Velocity Factor
np
Rotating speed of pinion (rpm)
Ng
Number of teeth on ring (driven) gear
Np
Number of teeth on pinion (driver) gear
J
Geometry factor for bending strength
P
Diametral pitch: large end of tooth (mm)
T
Torque
Vav
Avg. velocity (m/s.)
Km
Load distribution factor
Ko
Overload factor
Kv
Velocity Factor
Φ
Pressure angle (°)
Φn
Pressure angle in the plane normal to the tooth (°)
ψ
Helix angle (°)
γ
Pitch cone angle (°)
Table 2 – Nomenclature with givens and unknowns
12
Figure 10 show the SolidWork of the model assembly (bevel pinion gear, pinion shaft, bevel shaft,
bearing, bevel gear, bevel casting, chuck washer)
Figure 10: SolidWorks Model Assembly
13
Figure 11 show the solid works assembly exploded into pieces (shaft, bevel pinion gear, bevel gear,
bevel casting, bearings)
Figure 11: SolidWorks Assembly Exploded
Figure 12 show the two components, the bevel pinion gear and shaft.
Figure 12: Components Analyzed Exploded
14
1.2
1.2.1
Given and Measured Data
Given Data
In Table below show the given manufacturing specifications.
Manufacturing Specifications
Angular Velocity
11,000 rev/min
Voltage
110 Volts
Frequency (AC)
60 Hz single phase
Power
570 watts
Amperage
4.5 amps
In Table 1, all specifications are given by the manufacturer. Knowing that for single phase armature motors,
one hp is generated by 720 watts. Assuming that the most efficiency expected out of a single phase motor is
approximately 70%, 60% is used in this analysis.
hp
1.2.2
570 w 3
hp
720 w 4
Measured and Calculated Data
For proper analysis, certain measurable data needed to be collected. The material used in the angle
grinder was unknown; therefore it was necessary to perform hardness testing to gather useful material
data. The shaft and bevel pinion gear were easily accessible by the Rockwell Hardness Testing
Machine. This made the process more reliable in that the integrity of the material was not compromised
by forcefully removing the components from the remaining subassemblies. The bevel gear was
completely isolated from its main subassembly. This ensured no cutting of material or extended surface
hardening from clamping and pulling. The shaft was permanently fixed to its immediate subassembly.
Luckily the shaft was just long enough to get true readings without similar structural compromises as
the bevel gear.
15
Figure 13 show the hardness test machine that I use to get result for hardness test.
Figure 13: ME-2 Rockwell Hardness Testing System
Before the hardness test could begin, proper surface preparation needed to be performed to ensure
proper results. Three readings were done on the shaft as well as the bevel in different locations to and an
average hardness number. The location of testing on the material was also changed to get a variety of
readings and to also not get tainted results from nearby surface hardening created by testing. The hardness
testing operation can be seen below.
It is imperative to note that the material will be much harder on the tooth of the gear rather than in the
makeup material. There was no way to test the hardness of the material directly on the tooth without
risking safety for the holder. The reading, however, was done as close as possible to the side of the
tooth without risking the ball sliding down the face of the tooth.
16
Table 2: Hardness Testing Result
Using the hardness conversation chart [2] and the information from Shigley’s Mechanical
Engineering Design in Table 5 [3], material grade and tensile strength can be determined from the table
below.
17
The tables 3 show the hardness conversion chart that I use to get Tensile strength.
Table 3: Hardness Conversion Chart
Using the Figure 5.37 Shigley’s Mechanical Engineering Design that shows the AGMA strength
graph for gear, it uses to calculate the tensile strength.
Figure 4: AGMA Strength Graph for Gears
18
Tensile Strength Calculation
S t 77.3H b 12,800 psi
S tpiniom 77 .3 * 294 12,800 psi
S tpiniom 35 .526 kpsi
The following calculations are based on the presentation given in Example 13-8 from Shigley’s
Mechanical Engineering Design:
Calculations of Diametric Pitch
P
Np
d
Np =13 Teeth
d=20.0mm (outside diameter) as shown in figure 17.
Equation below was used to calculate pitch.
Pt
Np
d
13
teeth / mm 0.65teeth / mm
20
Before the normal diametral pitch can be determined, the helical angle “ψ” needed to be
determined. In the illustration below, lines were added and a protractor was used to measure ψ.
19
Figure 16: Pinion Close-up with Reference Lines
By using the reference lines the angle ψ was measured to be 40 degrees.
To get normal diametral pitch we use the formula below;
Pn
Pn
Pt
cos
0.65
teeth / mm 0.8485teeth / mm
cos 40
So we use the formula below to calculate the Pitch diameter;
dp
N
13teeth
15.32mm
Pn 0.8485teeth / mm
The information on table below based on measured and calculated data for the shaft and pinion gear
Table 5: Data of the gear and shaft
20
1.2.3
Schematic Drawing
Figure 17 show the schematic drawing for the shaft with the bevel pinion gear.
Figure 17: Schematic Drawing
21
2. Force Analysis
In this section I perform force analysis using the methods described in Example 13:43 and 13:44 from
Shigley’s Mechanical Engineering Design book
2.1. Free Body Diagram of Shaft
Figure 18 show the free body diagram for all the forces that apply to the shaft and bevel pinion gear and
bevel gear.
For each force we have tangential and axial and radial force
Figure 18: Free Body Diagram of System
22
2.2. Gear Force Calculations:
The figure 19 show the pinion bevel schematic .When gears are used to transmit motion between
intersecting shafts, some form of bevel gear is required. A bevel gearset is shown in Fig. 19.Although
bevel gears are usually made for a shaft angle of 90, they may be produced for almost any angle. The
teeth may be cast, milled, or generated. Only the generated teeth may be classed as accurate.
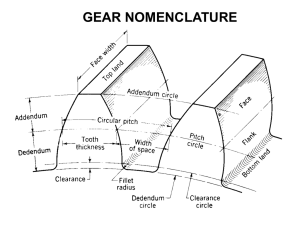
The terminology of bevel gears is illustrated in Fig.13-20.The pitch of bevel gears is measured at the
large end of the tooth, and both the circular pitch and the pitch diameter are calculated in the same
manner as for spur gears. It should be noted that the clearance is uniform. The pitch angles are defined
by the pitch cones meeting at the apex, as shown in the figure. They are related to the tooth numbers as
follows:
Tan y = Np/Ng
Tan T = Ng/Np
Where the subscripts P and G refer to the pinion and gear, respectively, and where y and T are,
respectively, the pitch angles of the pinion and gear.
Figure 19 shows that the shape of the teeth, when projected on the back cone, is the same as in a spur
gear having a radius equal to the back-cone distance “rb”. This is called tredgold's approximation. The
number of teeth in this imaginary gear is
N' = 2 rb/p
Where N' is the virtual number of teeth and p is the circular pitch measured at the large end of the teeth.
Standard straight-tooth bevel gears are cut by using a 20 pressure angle, unequal addenda and dedenda,
and full-depth teeth. This increases the contact ratio, avoids undercut, and increases the strength of the
pinion.
Figure 19: Pinion- Bevel Schematic
23
To get the angle T we have to use formula below to get the “y” angle and from there we get “T “.
tan 1 (
PinionTeet h
) 22.1
Bevelteeth
22.1
90 22.1 67.9
We use formula below to get the distance t2 from the end of the bevel pinion gear to the pitch point.
Same way to get the ‘y ‘axis distance from the end of the bevel pinion gear to the pitch point.
t 2 3.25mm cos(22.1 ) 3.011mm
t 3 3.25mm sin( 22.1 ) 1.222mm
These thicknesses represent the location of the pitch point and are illustrated above in Figure 19.
Distance from bearing D to horizontal pitch point location P is:
9.5 mm is from outside of bevel pinion to far side of bearing
Bearing is 7 mm wide so half of bearing is 3.50
DP( x) 19.5 (3.011mm 3.50mm) 13mm
The distance from bearing D to the horizontal pitch point location P is:
DP( y )
20 mm
1.222 mm 8.78mm
2
d p 8.78mm 2 17.56mm( pitchdiameter)
We use the formula below to calculate the axial and Tangential and radial force that apply from the bevel gear
into the bevel pinion gear.
t
WBP
t
WBP
60,000 hp
*d *n
3
60,000 hp
4
74 .2 N
*17 .56 mm *11,000 rpm
24
r
t
WBP
WBP
tan() cos( )
a
t
WBP
WBP
tan() sin( )
r
WBP
74.2N tan 20 cos22.1 25.02N
a
WBP
74.2N tan 20 sin 22.1 10.16N
W 10 .16 i 25 .02 j 74 .2k N
W ABS(W ) 78.96N
2.3. Shaft Force Calculations:
Figure 20 shows the free body diagram for the shaft, it showing all the forces that applies from the bearings
and bevel gear.
Taking the moment around D:
Figure 20: Force Analysais 2-D Planes
25
(x-y) plane:
So we take the moment at the point D to get the one equation with one unknown, and than from there we solve
for the force Fcy
M D Fcy 136 .5mm 10.16 N 8.78mm 25.02 N .13mm 0
Fcy 1.73N (change direction ) 1.73N
The total force in X direction equal to zero (static condition), to calculate the force FDx
Fx W a FDX
0
FDx 10.16N
The total force in y direction is equal to zero (static condition), to calculate the force FDy .
.
Fy W r FDy Fcy 0
FDy 26.75N
(x-z) Plane:
So we take the moment at the point D to get the one equation with one unknown and than from there we solve for
the force Fcz
M D W t 13mm Fcz .136 .5mm 0
Fcz 7.07N (change direction ) 7.07N
The total force in z direction equal to zero (static condition), to calculate the force FDz
Fz W t FDZ FCZ 0
FDZ 81.27N
26
1.73 j 7.07 K N
F
c
FC ABS ( FC ) 7.28 N
F D {10 .16i 26 .75 j 81 .3K}N
FD ABS ( FD ) 86 .2 N
2.4. Shear Force and Bending Moment Diagrams
Figures 21 show the load calculated and shear force and bending moment diagram.
Figure 21: Load, Shear Force, and Bending Moment Diagrams
27
3. Stress Analysis
3.1 Bending Stress and Bending Factor of Safety
We use the formula below to calculate the Dynamic Factor (Kv).
Kv (
A 200 .V B
)
A
The dynamic factor Kv accounts for internally generated gear tooth loads which are induced by nonuniform meshing action (transmission error) of gear teeth. If the actual dynamic tooth loads are known
from a comprehensive dynamic analysis, or are determined experimentally.
Assume quality number is 6. Transmission accuracy level number (Qv) could be taken as the quality
number. Qv = 6. The American gear manufacturing association has defined a set of quality control numbers
which can be taken as equal to the transmission accuracy level number Qv, to quantify these parameters
(AGMA 390.01). Classes 3< Qv<7 include must commercial quality gears and are generally suitable for any
applications.
Kv (
A 200 .V B
)
A
A 50 56(1 B) ifB 0.25(12 Qv )
B 0.25 * (12 6)
2
3
2
3
0.8254
A 50 56(1 0.8254) 59.77
So we use the formula below to calculate the velocity in
V
*d p *np
60
28
m
sec
V
Kv (
*17.56 mm *11,000 rev / min
60
10,113 .8 mm sec 10.114 m sec
59 .77 200 10 .114 m / sec .8254
)
1.59
59 .77
Overload Factor (Ko)
Assuming uniform loading, so Ko = 1.
Size Factor Ks.
From Table 14-2 [5] in page 653 Shigley’s Mechanical Engineering Design. 8th Ed. (s, Yp (13T) is 0.261
Face the width 6.5 mm →6.5 mm/25.4 mm/in= 0.2559 in.
P = 0.8485 Teeth/mm = 21.552 Teeth/inch
Ks
1
F Y 0.0535
1.192 (
)
kb
P
This is for standard units
Ks
1
F Y 0.0535
0.2559 in * 0.261 0.0535
1.192 (
)
1.192 * (
)
0.907
kb
P
21.552 T / in
K H Cmf 1 Cmc * (C pf *C pm Cma*Ce )
Assume uncrowned so (load correction factor) Cmc=1
F 10.00
C pf
In (Pinion Proportion factor) Cpf;
F
6.5mm
0.025
0.025 0.0120
10 * d
10 *17.56 mm
Cpm (pinion proportion modifier) =1.0
Cma(Mesh alignment factor)
Cma A BF CF 2
29
Using the table 14.9 [6], Value for A, B, C are as follows:
A=0.127
B=0.0158
C .930 10 4
Cma 0.127 0.0158 0.2559 .930104 *.25592 .1310
Ce(Mesh alignment correction factor )1
K H Cmf 1 1* (0.0120*1 0.1310*1) 1.143
Rim Thickness factor Kb=1 due to consistent thickness of gear.
Speed Ration mG;
mG
N G 32T
2.46
13T
NP
Load Cycle factor (Yn) using 13T for pinion and life cycle 10
YN ( P) 1.3558* N p 0.0178 1.3558* (108 ) 0.0178 0.977
From Table 14-10 [7] and a reliability of 0.90, KR (YZ) = 0.85;
From Figure 14-6 [8], The YJ(P) = 0.21
KT (Temperature Factor) Temperature is less than 250 °F so K T = 1
Brinell hardness number 294
St (Allowable Bending Stress for Hardened Steels) for 294 Brinell.
Grade 1:
St (0.533 H B 88.3)MPa (0.533 * 294 * 88.3) 245 MPa
Sc (Contact fatigue strength) for Brinell and grade 1.
S c (2.22 H B 200 )Mpa (2.22 * 2.94 200 ) 852 .7Mpa
30
Pinion Tooth bending stress
p W t K0 Kv ks *
P KH KB
*
F
Yj
p 16.7ibf *1*1.59 * .907 *
21.552 T / in 1.143 *1
*
11040 psi 76.1Mpa
0.2559 in
.21
We use the formula bellow to calculate the bending fatigue factor of safety for pinion;
S t * YN
S F ( P)
p KT K R
245 MPA * .977
3.7
S F ( P )
76 .1Mpa *1 * .85
p 76.1MPa
S F ( P) 3.7
3.2. Wear Stress and Bending Factor of Safety
Surface Condition Factor Cf=Zr=1(No surface defects specified)
We use the formula bellow to show the stress and bending factor of safety Z
2 2
Z [(rp a) 2 r 2 bp ] 2 [(rG a) 2 rbg
] (rp rg ) sin t
1
1
Where;
rp 8.78mm
rG 18 .74 mm
rbG,bp r cost , rbg 16.93mm
a
1
1
1.17855
pn 0.8485
rbP 7.93mm
31
t tan 1
tan n tan 20
25 .41
cos
cos 40
1
1
Z [(8.78mm 1.17855 ) 2 (7.93mm) 2 ] 2 [(18.74 mm 1.17855 ) 2 (16.93mm) 2 ] 2 [(8.78mm 18.74 mm) sin 25 .41
n 20
pn pn cos n
mN
pn
cosn
0.8485 mm
cos 20 3.479 mm
pN
3.479 mm
.778
0.95 Z .95 * 4.71mm
mG
cos 20 sin 20
I Z1
*
2 * mN
mG 1
I Z1
cos * sin
2.46
*
0.147
2 * 0.778
2.46 1
From the table 14-8 [9] from shigly mechanical design page 543 we use the formula to calculate the Ze
( Elastic coefficients factor);
C p Z E 191 MPa 2300 psi
We use the formula Stress cycle factors for pinion;
0.023 1.4488* (108 ) 0.023 .948
Z N ( P) 1.4488* N p
So we use the formula below to calculate the contact stress:
c C p W t K0 Kv K s
Cf
KH
*
d ( p) * F
I
32
2300 psi 16 .7ibf *1*1.59 * .907 *
1.1385
1
*
74 .7ksi 515 MPa
.69134 in * .2559 .147
We use the formula below to calculate the wear Factor of safety:
[
S H ( P)
sC * z N
]
KT * K R
C
852 .7 MAP * .948
]
1
*
.
85
1.85
515 MPa
[
515 MPa
S H ( P) 1.85
4. Stress Analysis of Output Shaft
4.1. Shat Force calculations Using Vector Cross Product
So we use the formula below to get the absolute value for W
W {10 .16i 25 .02 j 74 .2k}N
W ABS (W ) 78 .96 N
RDP {13i 8.78 j}mm
RDC {136 .5i}mm
From both equations above we use the values to calculate the torque T
t
T 8.78 mm *WBp
8.78 mm * 74 .2 N 651 N .mm
T 651 .5iN.mm
So taking the moment around D to calculate the force FZC :
M D RDP *W RDC * FC T 0
33
M D {13i 8.78 j}mm *{10.16i 25.02 j 74.2k}N {136 .4i}mm *{Fyc j Fzc k}N {Ti} 0
FZC
964 .6 N .mm
7.07 KN
136 .5mm
FYC
236 .1N .mm
1.73 j..N
136 .5mm
F C {1.73 j 7.07 k}N
Fc ABS ( FC ) 7.28 N
To get Fd, we use the equation below (sum the forces equal to zero, static condition).
Fd FC W 0
So the sum of the force equal to zero (static condition)
F {Fxd i FyD FZD }lbf {0i 1.73 j 7.07}N {10.16i 25.02 j 74.2}N 0
Fxd 10.16i.N
Fyd 26 .75 . j.N
Fzd 81.3K.N
F {10 .16i 26.75 j 81 .3k}N
So the absolute value for Fd is calculated below.
FD ABS ( F D ) 86 .2 N
34
4.2 The safety factor of the shaft.
We use the formula below to calculate the moment on the shaft at point D of the bearing.
M max (965 N .mm) 2 (236 .2 N .mm) 2 993 .5N .mm
M max 993 .5N .mm
Tmax 651 .5N .mm
D / d 10.10 mm / 8mm 1.26
Assume r=2.54 mm (0.1in)
r / d 2.54 mm / 8mm .3175
K t 1.4[12]
K ts 1.2[13]
Notch sensitivity (q) =0.95[14]
Shear notch sensitivity (qshear)=1 [15]
K f 1 q( Kt 1) 1 0.95(1.4 1) 1.38
K f 1 qs ( Kts 1) 1 1(1.2 1) 1.2
a" K f
32 .M max
.d
m" 3.[ K fs
m" 3.[1.2
3
16 .Tmax
.d
3
1.38
32 * 993 .5 N .mm
.(8mm ) 3
]2
16 . * 651 .5 N .mm
.(8mm )
3
]2 13 .47 MPa
Assume Sy=0.775Sut
35
27 .28 MPa
Sut=106Ksi = 730.8MPa
So the safety factor of the shaft is calculated using the formula below.
n yield
n yield
Sy
m' a'
0.775 * 730 .8MPa
13.9
13.47 MPa 27.28 MPa
4.3 Fatigue Factor of Safety Calculations
Analysis based on Modified Goodman Design Theory
Se' 0.5 * Sut
Se' 0.5 * 730.8MPa 365.4MPa
Using the table6-2[5] from Shigly Mechanical Design book and assuming a surface finishes of
mechanized or cold drawn:
a=4.51
b=-0.265
Surface Factor Ka;
K a a * Sut b 4.51 * 730 .8MPa 0.265 0.786
Combined Loading so Kc=1
Room Temperature operation so kd=1
From table6-5[4] page 785 from Shigley’s Mechanical Engineering Design. 8th Ed. Book and also
assuming 90% reliability ke=0.897
Se K a Kb K c K d K e Se' .786 *.993*1*1*.897 * 365.4MPa 255.82MPa
1
n fatigue
n fatigue
a'
Se
m'
S ut
n fatigue
S e * S ut
S ut * a' S e . ' m
255 .82 MPa * 730 .8MPa
8
730 .8Mpa * 27 .28 MPa 255 .82 MPa 13 .47 MPa
Comparing N yield and N fatigue
n yield 13.9 n fatigue 8
This shows that the shaft will fail by fatigue.
36
5
Finite Element of Output Shaft
5.1. Loads and Restraints Setup
Figure 22 show the load and restraint setup on Cosmos software.
Figure 22: Restraints at Bearing D
37
At bearing D, radial and axial restraints were set. Restraints were applied to a 2 mm cylindrical face placed
at the midpoint of the bearing location.
Figure 23: Restraints at Bearing C
38
The bearing restraint at C was set for only a rotational restraint. This was to ensure that over-constraining
the shaft was avoided. This restraint was also applied to a 2 mm cylindrical face placed at the midpoint of
the bearing location.
Figure 24: Loads at Pitch Point Applied Using Remote Load
39
5.2
COSMOS Stress Analysis
Figure 25 shows the shaft with constraints and loads and study run .using the Cosmos software .as you see
the maximum stress appear on the bearing area.
Figure 25: Shaft with Constraints and Loads and Study Run
Figure 26 show the probe value of the maximum stress
'
m
ax
Figure 26: Probe Value of Maximum Stress
40
As seen in the figure above, the maximum stress calculated by the study is 28.12 MPa
'
Using Von Misses to get an analytical value for max
'
max
m2 m * a a2 3. m2
'
max
(1.38 *
32 * 965 N .mm 2
16 * 236 .2 N .mm 2
) 3.(1.2
) 26 .9MPa
* (8mm )
.(8mm ) 3
% Difference :
x1 x2
*100
x1 x2
2
26 .9MPa 28 .12 MPa
% Difference
*100 4.43 %diffrence
26 .9MPa 28 .12 MPa
2
% Difference
Using COSMOS, the maximum value found was 28.12 MPa. There is a difference of 4.43 % from a
calculated value of 26.9MPa. This could be attributed to model building techniques in SolidWorks. There
could also be variations in part measurements which could skew calculations slightly. Changes in restraint
locations and “bearing” restraints types may bring different results. Better understanding and practice of
COSMOS could also produce improved results. Overall the stress analysis attributed by COSMOS is an
excellent representation of the type of stress the part may succumb to.
6.
Discussion
The project exemplified real world tasks that definitely sharpened my skills as young engineers. The handson experience gained by using the equipment and software tools was invaluable. The experience of using
specific tools, acquiring data, and using this data in calculations was a particularly useful experience. It
provided some relevance of the knowledge learned from work experience and my other engineering courses.
Also COSMOS in particular was beneficial not only because I was able to use it as a comparison tool but
also because of the practical experience gained which will be useful in the a ‘real-world’ application. This
tool gives a visual representation of the types of stresses and possible deformations that may occur in design.
This quick reference will give the design engineer an approximation of what to expect under certain loads or
applications. This brief exposure to COSMOS will certainly be invaluable.
41
7.
Reference:
[1] Manufacturing Specifications link,
http://www.harborfreight.com/cpi/ctaf/displayitem.taf?Itemnumber=43471
p/english/gear/myset/spiral.html
[2] Hardness conversion chart,
http://www.carbidedepot.com/formulas-hardness.htm
[3] AGMA Strength Graph for Hardened Steels,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. pp 727
[4] Reliability Assumption,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 6-5, pp 285
[5] Parameters for Marin Surface Modification Factors,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 6-2, pp 280
[6] Lewis Form Factor,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 14-2, pp 718
[7] Empirical Constants for Load Distribution Factor
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 14-9, pp 740
[8] Reliability Factor KR
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 14-10, pp 744
[9] Geometry Factor,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Figure 14-6, pp 727
[10] For Elastic Coefficient,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Table 14-8, pp 737
[12] For Stress Concentration Value Kt,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Appendix Figure 15-6, pp 1007
42
[13] For Stress Concentration Value Kts.
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Appendix Figure 15-8, pp 1008 32
[14] Notch Sensitivity q,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Figure 6-20, pp 287
[15] Shear Notch Sensitivity q,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Figure 6-21, pp 288
[16] pitch diameter p,
Budynas, R., Nisbett, K., Shigley’s Mechanical Engineering Design. 8th Ed. McGraw Hill, New
York NY, 2008. Example 13:15, pp 245
43