Trapzoidal Rule - Math For College
advertisement

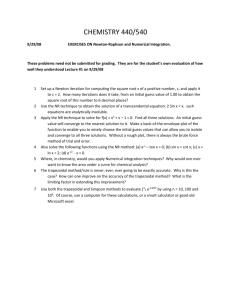
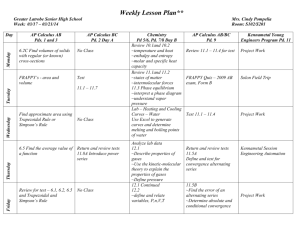
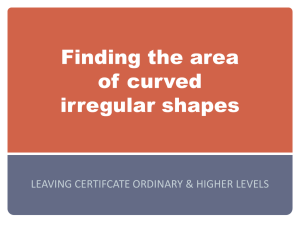
Chapter 07.02 Trapezoidal Rule of Integration After reading this chapter, you should be able to: 1. 2. 3. 4. 5. derive the trapezoidal rule of integration, use the trapezoidal rule of integration to solve problems, derive the multiple-segment trapezoidal rule of integration, use the multiple-segment trapezoidal rule of integration to solve problems, and derive the formula for the true error in the multiple-segment trapezoidal rule of integration. What is integration? Integration is the process of measuring the area under a function plotted on a graph. Why would we want to integrate a function? Among the most common examples are finding the velocity of a body from an acceleration function, and displacement of a body from a velocity function. Throughout many engineering fields, there are (what sometimes seems like) countless applications for integral calculus. You can read about some of these applications in Chapters 07.00A-07.00G. Sometimes, the evaluation of expressions involving these integrals can become daunting, if not indeterminate. For this reason, a wide variety of numerical methods has been developed to simplify the integral. Here, we will discuss the trapezoidal rule of approximating integrals of the form b I f x dx a where f (x) is called the integrand, a lower limit of integration b upper limit of integration What is the trapezoidal rule? The trapezoidal rule is based on the Newton-Cotes formula that if one approximates the integrand by an n th order polynomial, then the integral of the function is approximated by 07.02.1 07.02.2 Chapter 07.02 the integral of that n th order polynomial. Integrating polynomials is simple and is based on the calculus formula. Figure 1 Integration of a function b n1 a n1 a x dx n 1 , n 1 So if we want to approximate the integral b n (1) b I f ( x)dx (2) a to find the value of the above integral, one assumes f ( x) f n ( x) where f n ( x) a0 a1 x ... a n 1 x n 1 a n x n . (3) (4) where f n (x) is a n th order polynomial. The trapezoidal rule assumes n 1, that is, approximating the integral by a linear polynomial (straight line), b a b f ( x)dx f1 ( x)dx a Derivation of the Trapezoidal Rule Method 1: Derived from Calculus b b a a f ( x)dx f ( x)dx 1 b (a0 a1 x)dx a b2 a2 a0 (b a) a1 2 (5) Trapezoidal Rule 07.02.3 But what is a 0 and a1 ? Now if one chooses, (a, f (a)) and (b, f (b)) as the two points to approximate f (x) by a straight line from a to b , f (a) f1 (a) a0 a1a (6) (7) f (b) f1 (b) a0 a1b Solving the above two equations for a1 and a 0 , f (b) f (a ) a1 ba f (a)b f (b)a a0 ba Hence from Equation (5), b f (a)b f (b)a f (b) f (a) b 2 a 2 f ( x ) dx ( b a ) a ba ba 2 f (a) f (b) (b a) 2 a (8b) (9) Method 2: Also Derived from Calculus f1 ( x) can also be approximated by using Newton’s divided difference polynomial as f (b) f (a) f1 ( x) f (a) ( x a) ba Hence b (8a) b f ( x)dx f1 ( x)dx a f (b) f (a) f (a) ( x a) dx ba a b b f (b) f (a) x 2 ax f (a) x ba 2 a 2 a2 f (b) f (a) b f (a)b f (a)a a 2 ab ba 2 2 2 a2 f (b) f (a) b f (a)b f (a)a ab ba 2 2 f (b) f (a ) 1 2 f (a)b f (a)a b a b a 2 1 f (a )b f (a)a f (b) f (a) b a 2 (10) 07.02.4 Chapter 07.02 1 1 1 1 f (b)b f (b)a f (a)b f (a)a 2 2 2 2 1 1 1 1 f (a)b f (a)a f (b)b f (b)a 2 2 2 2 f ( a ) f ( b ) (b a) (11) 2 This gives the same result as Equation (10) because they are just different forms of writing the same polynomial. f (a)b f (a)a Method 3: Derived from Geometry The trapezoidal rule can also be derived from geometry. Look at Figure 2. The area under the curve f1 ( x) is the area of a trapezoid. The integral b f ( x)dx Area of trapezoid a 1 (Sum of length of parallel sides)(Perpendicular distance between parallel sides) 2 1 f (b) f (a ) (b a ) 2 f (a) f (b) (b a) (12) 2 Figure 2 Geometric representation of trapezoidal rule. Method 4: Derived from Method of Coefficients The trapezoidal rule can also be derived by the method of coefficients. The formula b ba ba a f ( x)dx 2 f (a) 2 f (b) 2 ci f ( xi ) i 1 where c1 ba 2 (13) Trapezoidal Rule 07.02.5 ba 2 x1 a x2 b c2 Figure 3 Area by method of coefficients. The interpretation is that f (x) is evaluated at points a and b , and each function evaluation ba is given a weight of . Geometrically, Equation (12) is looked at as the area of a 2 trapezoid, while Equation (13) is viewed as the sum of the area of two rectangles, as shown in Figure 3. How can one derive the trapezoidal rule by the method of coefficients? Assume b f ( x)dx c 1 f (a) c2 f (b) (14) a b Let the right hand side be an exact expression for integrals of 1dx a b and xdx , that is, the a formula will then also be exact for linear combinations of f ( x) 1 and f ( x) x , that is, for f ( x) a0 (1) a1 ( x) . b 1dx b a c 1 c2 (15) a b2 a2 c1a c2 b 2 a Solving the above two equations gives ba c1 2 ba c2 2 Hence b xdx (16) (17) 07.02.6 Chapter 07.02 b f ( x)dx a ba ba f (a) f (b) 2 2 (18) Method 5: Another approach on the Method of Coefficients The trapezoidal rule can also be derived by the method of coefficients by another approach b ba ba a f ( x)dx 2 f (a) 2 f (b) Assume b f ( x)dx c 1 f (a) c2 f (b) (19) a Let the right hand side be exact for integrals of the form b a 0 a1 x dx a So b x2 a a x dx a x a 1 a 0 1 0 2 a b2 a2 a0 b a a1 2 But we want b b a 0 a1 x dx c1 f (a) c2 f (b) (20) (21) a to give the same result as Equation (20) for f ( x) a0 a1 x . b a 0 a1 x dx c1 a0 a1a c2 a0 a1b a a0 c1 c2 a1 c1a c2 b Hence from Equations (20) and (22), b2 a2 a0 c1 c2 a1 c1a c2 b a0 b a a1 2 (22) Since a 0 and a1 are arbitrary for a general straight line c1 c2 b a b2 a2 2 Again, solving the above two equations (23) gives ba c1 2 ba c2 2 c1 a c 2 b (23) (24) Trapezoidal Rule 07.02.7 Therefore b f ( x)dx c 1 f (a) c2 f (b) a ba ba f (a) f (b) 2 2 (25) Example 1 The vertical distance covered by a rocket from t 8 to t 30 seconds is given by 30 140000 x 2000 ln 9.8t dt 140000 2100t 8 a) Use the single segment trapezoidal rule to find the distance covered for t 8 to t 30 seconds. b) Find the true error, E t for part (a). c) Find the absolute relative true error for part (a). Solution a) f (a) f (b) I (b a) , where 2 a 8 b 30 140000 f (t ) 2000 ln 9.8t 140000 2100t 140000 f (8) 2000 ln 9.8(8) 140000 2100(8) 177.27 m/s 140000 f (30) 2000 ln 9.8(30) 140000 2100(30) 901.67 m/s 177.27 901.67 I (30 8) 2 11868 m b) The exact value of the above integral is 30 140000 x 2000 ln 9.8t dt 140000 2100t 8 11061 m so the true error is Et True Value – Approximate Value 11061 11868 807 m 07.02.8 Chapter 07.02 c) The absolute relative true error, t , would then be True Error 100 True Value 11061 11868 100 11061 7.2958% t Multiple-Segment Trapezoidal Rule In Example 1, the true error using a single segment trapezoidal rule was large. We can divide the interval [8,30] into [8,19] and [19,30] intervals and apply the trapezoidal rule over each segment. 140000 f (t ) 2000 ln 9.8t 140000 2100t 30 19 30 8 8 19 f (t )dt f (t )dt f (t )dt f (8) f (19) f (19) f (30) (19 8) (30 19) 2 2 f (8) 177.27 m/s 140000 9.8(19) 484.75 m/s f (19) 2000 ln 140000 2100 ( 19 ) f (30) 901.67 m/s Hence 177.27 484.75 484.75 901.67 ( 30 19 ) 2 2 8 11266 m The true error, E t is Et 11061 11266 205 m The true error now is reduced from 807 m to 205 m. Extending this procedure to dividing [a, b] into n equal segments and applying the trapezoidal rule over each segment, the sum of the results obtained for each segment is the approximate value of the integral. Divide (b a ) into n equal segments as shown in Figure 4. Then the width of each segment is ba h (26) n The integral I can be broken into h integrals as 30 f (t )dt (19 8) b I f ( x)dx a Trapezoidal Rule 07.02.9 ah a2h f ( x)dx ah a f ( x)dx ... a ( n 1) h f ( x)dx a ( n2) h b f ( x)dx (27) a ( n 1) h Figure 4 Multiple ( n 4 ) segment trapezoidal rule Applying trapezoidal rule Equation (27) on each segment gives b f ( a ) f ( a h) a f ( x)dx (a h) a 2 f ( a h) f ( a 2h) (a 2h) (a h) 2 f (a (n 2)h) f (a (n 1)h) …………… a (n 1)h a (n 2)h 2 f (a (n 1)h) f (b) b a (n 1)h 2 f ( a ) f ( a h) f ( a h) f ( a 2h) h h ................... 2 2 f (a (n 2)h) f (a (n 1)h) f (a (n 1)h) f (b) h h 2 2 f (a) 2 f (a h) 2 f (a 2h) ... 2 f (a (n 1)h) f (b) h 2 h n1 f ( a ) 2 f (a ih ) f (b) 2 i 1 ba n1 f (a) 2 f (a ih ) f (b) 2n i 1 (28) 07.02.10 Chapter 07.02 Example 2 The vertical distance covered by a rocket from t 8 to t 30 seconds is given by 30 140000 x 2000 ln 9.8t dt 140000 2100t 8 a) Use the two-segment trapezoidal rule to find the distance covered from t 8 to t 30 seconds. b) Find the true error, E t for part (a). c) Find the absolute relative true error for part (a). Solution a) The solution using 2-segment Trapezoidal rule is ba n1 I f ( a ) 2 f (a ih) f (b) 2n i 1 n2 a 8 b 30 ba h n 30 8 2 11 30 8 21 I f (8) 2 f (8 11i) f (30) 2(2) i 1 22 f (8) 2 f (19) f (30) 4 22 177.27 2(484.75) 901.67 4 11266 m b) The exact value of the above integral is 30 140000 x 2000 ln 9.8t dt 140000 2100t 8 11061 m so the true error is Et True Value Approximate Value 11061 11266 205 m c) The absolute relative true error, t , would then be Trapezoidal Rule 07.02.11 True Error 100 True Value 11061 11266 100 11061 1.8537% t Table 1 Values obtained using multiple-segment trapezoidal rule for 30 140000 x 2000 ln 9.8t dt 140000 2100t 8 n 1 2 3 4 5 6 7 8 Approximate Value 11868 11266 11153 11113 11094 11084 11078 11074 Et t % a % -807 -205 -91.4 -51.5 -33.0 -22.9 -16.8 -12.9 7.296 1.853 0.8265 0.4655 0.2981 0.2070 0.1521 0.1165 --5.343 1.019 0.3594 0.1669 0.09082 0.05482 0.03560 Example 3 Use the multiple-segment trapezoidal rule to find the area under the curve 300 x f ( x) 1 ex from x 0 to x 10 . Solution Using two segments, we get 10 0 h 5 2 300(0) f ( 0) 0 1 e0 300(5) f (5) 10.039 1 e5 300(10) f (10) 0.136 1 e10 ba n1 I f ( a ) 2 f (a ih) f (b) 2n i 1 10 0 21 f (0) 2 f (0 5) f (10) 2(2) i 1 07.02.12 Chapter 07.02 10 f (0) 2 f (5) f (10) 4 10 0 2(10.039) 0.136 50.537 4 So what is the true value of this integral? 10 300 x 0 1 e x dx 246.59 Making the absolute relative true error 246.59 50.535 t 100 246.59 79.506% Why is the true value so far away from the approximate values? Just take a look at Figure 5. As you can see, the area under the “trapezoids” (yeah, they really look like triangles now) covers a small portion of the area under the curve. As we add more segments, the approximated value quickly approaches the true value. Figure 5 2-segment trapezoidal rule approximation. 10 Table 2 Values obtained using multiple-segment trapezoidal rule for 0 n Approximate Value Et 1 0.681 245.91 99.724% 2 50.535 196.05 79.505% 4 170.61 75.978 30.812% 8 227.04 19.546 7.927% t 300 x 1 e x dx . Trapezoidal Rule 07.02.13 16 241.70 4.887 1.982% 32 245.37 1.222 0.495% 64 246.28 0.305 0.124% Example 4 Use multiple-segment trapezoidal rule to find 2 1 I dx x 0 Solution We cannot use the trapezoidal rule for this integral, as the value of the integrand at x 0 is infinite. However, it is known that a discontinuity in a curve will not change the area under it. We can assume any value for the function at x 0 . The algorithm to define the function so that we can use the multiple-segment trapezoidal rule is given below. Function f (x) If x 0 Then f 0 If x 0 Then f x ^ (0.5) End Function Basically, we are just assigning the function a value of zero at x 0 . Everywhere else, the function is continuous. This means the true value of our integral will be just that—true. Let’s see what happens using the multiple-segment trapezoidal rule. Using two segments, we get 20 h 1 2 f (0) 0 1 f (1) 1 1 1 f (2) 0.70711 2 ba n1 I f (a) 2 f (a ih) f (b) 2n i 1 20 21 f ( 0 ) 2 f (0 1) f (2) 2(2) i 1 2 f (0) 2 f (1) f (2) 4 2 0 2(1) 0.70711 4 1.3536 07.02.14 Chapter 07.02 So what is the true value of this integral? 2 1 0 x dx 2.8284 Thus making the absolute relative true error 2.8284 1.3536 t 100 2.8284 52.145% 2 Table 3 Values obtained using multiple-segment trapezoidal rule for 0 Approximate Value 2 1.354 4 1.792 8 2.097 16 2.312 32 2.463 64 2.570 128 2.646 256 2.699 512 2.737 1024 2.764 2048 2.783 4096 2.796 n Et t 1.474 1.036 0.731 0.516 0.365 0.258 0.182 0.129 0.091 0.064 0.045 0.032 52.14% 36.64% 25.85% 18.26% 12.91% 9.128% 6.454% 4.564% 3.227% 2.282% 1.613% 1.141% 1 x dx . Error in Multiple-segment Trapezoidal Rule The true error for a single segment Trapezoidal rule is given by (b a ) 3 Et f " ( ), a b 12 Where is some point in a, b . What is the error then in the multiple-segment trapezoidal rule? It will be simply the sum of the errors from each segment, where the error in each segment is that of the single segment trapezoidal rule. The error in each segment is (a h) a 3 f " ( ), a a h E1 1 1 12 h3 f " ( 1 ) 12 3 ( a 2h ) ( a h ) E2 f " ( 2 ), a h 2 a 2h 12 h3 f " ( 2 ) 12 Trapezoidal Rule . . . Ei 07.02.15 (a ih ) (a (i 1)h)3 12 f " ( i ), a (i 1)h i a ih h3 f " ( i ) 12 . . . En 1 a (n 1)h a (n 2)h3 12 f " ( n 1 ), a (n 2)h n 1 a (n 1)h h3 f " ( n 1 ) 12 b a (n 1)h3 f " ( ), a (n 1)h b En n n 12 h3 f " ( n ) 12 Hence the total error in the multiple-segment trapezoidal rule is n Et Ei i 1 h3 n f " ( i ) 12 i 1 (b a ) 3 n f " ( i ) 12n 3 i 1 n (b a ) 3 12n 2 f " ( ) i i 1 n n f " ( The term i 1 i ) n derivative f " ( x), a x b . Hence n is an approximate f " ( i ) (b a ) 3 i 1 Et 12n 2 n In Table 4, the approximate value of the integral 30 140000 2000 ln 9 . 8 t dt 8 140000 2100t average value of the second 07.02.16 Chapter 07.02 is given as a function of the number of segments. You can visualize that as the number of segments are doubled, the true error gets approximately quartered. Table 4 Values obtained using multiple-segment trapezoidal rule for 30 140000 x 2000 ln 9.8t dt . 140000 2100t 8 Approximate Value 2 11266 4 11113 8 11074 16 11065 n Et t % a % -205 -52 -13 -4 1.853 0.4701 0.1175 0.03616 5.343 0.3594 0.03560 0.00401 For example, for the 2-segment trapezoidal rule, the true error is -205, and a quarter of that error is -51.25. That is close to the true error of -48 for the 4-segment trapezoidal rule. Can you answer the question why is the true error not exactly -51.25? How does this information help us in numerical integration? You will find out that this forms the basis of Romberg integration based on the trapezoidal rule, where we use the argument that true error gets approximately quartered when the number of segments is doubled. Romberg integration based on the trapezoidal rule is computationally more efficient than using the trapezoidal rule by itself in developing an automatic integration scheme. INTEGRATION Topic Trapezoidal Rule Summary These are textbook notes of trapezoidal rule of integration Major General Engineering Authors Autar Kaw, Michael Keteltas Date March 9, 2016 Web Site http://numericalmethods.eng.usf.edu