Background and Previous Work
advertisement

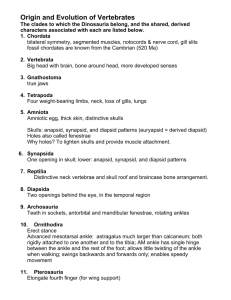
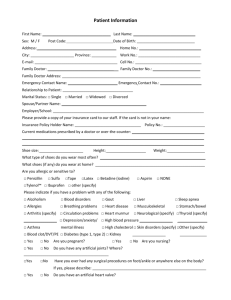
Michael Colarossi Honors Thesis Proposal Advisor: Professor John Moosbrugger March 8, 2007 Developing a Multi-Link Model to Describe the Motion of a Person Standing on an Oscillating Base Abstract: The objective of this project is to develop a multi-link model to describe the motion of a person standing on a platform base with small amplitude and oscillating motion. An understanding of how this motion is propagated through the linkage will help with future testing of how a person balances himself/herself. Previous work has primarily focused on modeling forces on the ankle, where the body is treated as an inverted pendulum with a lumped mass. Forces between the ankle and platform and the location of these forces have been measured, and ankle torque and sway angle of the ankle can be estimated. In this project, it is proposed to include additional joints such as the knee, hip, and the lumbro-sacral (lower spine), and model how they affect the motion. Stiffness and damping elements will be included in the joint couplings. Stabilization through feedback forces/moments may also be explored. Joint stiffness and damping coefficients and centers of mass will be required. These can be estimated experimentally, and most of this will be done in the SLIP-FALLS-STEP (Sliding Linear Investigative Platform for Assessing Lower Limb Stability with Synced Tracking, EMG and Pressure measurements) laboratory. This lab has equipment where a subject can stand on a platform undergoing specified motion. The subject can be stabilized in a harness (to limit error in results). Control and data acquisition systems are coupled to this platform, to control the platform motion and displays and records important data, ranging from center of pressure on the ankle to torque at the head. Background and Previous Work: There have been several studies aimed at understanding how a small perturbation can affect a person’s balance. Some of these focus on the effect on the ankle, and others look at how the whole body can be affected. For this thesis, it is important to understand the methodology, results, and the equipment used in these experiments. Pilkar et al. measured and modeled ankle angle changes while standing on a platform subjected to a small motion perturbation. The equation of motion is derived from a free-body-diagram of the ankle, and treating the body as an inverted pendulum. With the inverted pendulum idea, there is a lumped mass with a gravity force, inertial mass force and an ankle torque1. This is shown below in Figure 1. After the subject is given a small perturbation, multiple measurements were made on the ankle angle position, ankle torque, center of pressure, and center of mass. This demonstrates the type of measurements that can be made, though this project aims to explore more than just the ankle; it will involve how motion of a platform affects other areas of the body and how the subject reacts to balance himself/herself. Also, since this work was performed at Clarkson, the equipment is the same equipment that will be used for ongoing experimental work parallel to this thesis. Figure 1 – Body Treated as an Inverted Pendulum Ji et al. utilized the same idea of an inverted pendulum and also measured similar categories, but used a different method to better evaluate sway and directly calculated ankle moment and ankle stiffness from the reaction forces from the ground2. A free-body diagram of the ankle is made, and equations for sway angle and torque are determined. Instead of using the center of mass (COM) results from the measuring device (they believed that the device’s accuracy was not perfectly reliable), the equation used for COM in this experiment was: COM = height of the person*angle(θ). Using this formula, the COM results are about 1% higher than the device’s results. For this thesis, it may be useful to use simplifying equations like this if it can be as accurate as or more accurate than finding experimental data. Corbeil et al. used the same methodology, but they determined how someone’s mass can affect balance. The main result was that greater mass leads to greater risk of falling3. This is because the center of mass is further away from the ankle for a heavier person, which leads to a greater moment on the ankle and a greater ankle torque is required to counter-balance it3. This work is useful for here because of the method used to find the center of mass. Percentage of mass was found for certain areas of the body, and this will be helpful since this thesis project may require finding centers of mass between segments of the body. Gruneberg et al. tested the idea that multiple joints help in balancing a person. They concluded that balancing from pitch perturbations is controlled by ankle and knee joints, while hip and lumbro-sacral joints balance a person from roll perturbations4. They also concluded that these balancing corrections are independent of one another4. Subjects were standing on a platform that was given a perturbation in the pitch direction and then in the roll direction after a small delay. It was observed that during this delay there were small changes in the pitch motion of the legs and trunk but after the movement in the roll direction there was a balancing motion in the legs and trunk4. This is shown below in Figure 2. This is important because even though a multi-link model is to be developed in this thesis, some body motion couplings may be more important than others. Figure 2 – How Trunk Roll and Pitch Angle are Affected by a Delay in the Roll Direction Storey et al. developed a kinematic methodology to describe the motion of a multilink model. In this approach there is a translation and rotation of a set of joints to certain coordinates and then a continuation to translate and rotate them back to the original position, while modeling the motion throughout the process. A computational model computes position and orientation of individual limb segments and joints5. Matlab is used to develop a matrix that has each of the limb vertices and the x, y, and z position coordinates. This matrix is used to describe the coordinates after a joint is rotated or translated. It is seen that the yaw, pitch, and roll angles change from rotation about a joint5. This paper used animal joints to help describe the modeling, but this idea can be used for human joints and limbs. Description of Proposed Work: The objective of this project is to develop a linkage system model that describes the motion of a person standing on a platform with oscillating motion. Such a model will help in understanding what joints in the human body have a role in balancing someone and how they help with balancing. It will also aid in the interpretations and design of experiments. The literature will be surveyed to ascertain the current understanding of how the body reacts to an oscillating base. Free-body diagrams will be developed to derive the equations of motion for the multi-link model. In the free-body diagrams, each joint will have a stiffness and damping coefficient that opposes the direction of motion, and there will be an inertial mass force. There may be additional external forces or torques on the person or the joints and this will be needed to be determined. Concurrent with modeling, testing of subjects will be performed in the SLIP-FALLS-STEP lab. Control and data acquisition systems will be used to control the amplitude of the sinusoidal wave that affects the platform motion, and will collect and store data of how the person reacts to the motion of the platform. The data collected from the testing will be compared to model results to improve and validate the model. Ultimately the aim is to use the model to help describe how the motion of the platform is propagated through the subject’s body. Members of Professor Robinson’s group in the SLIP-FALLS-STEP laboratory will be collaborating on this project. They will assist in training, equipment operation, and in performing experiments. They will also provide advice and consultation in the development of the model. Thesis Timeline: February/March 2007: -Research previous works relating to thesis topic -Develop hand-written sketch of possible model of multi-linkage system -Finish thesis proposal April 2007: -Become familiar with lab equipment -Revise and edit model August/September 2007: -Develop model using computer program (such as Matlab) -Finish research on previous works October/November 2007: -Test model in laboratory -Revise and re-test model as necessary -Analyze data and model to develop conclusions January/February 2008: -Write rough draft of thesis -Revise thesis March 2008: -Finish final copy of thesis/presentation References: 1) R. Pilkar, J. Moosbrugger, V. Bhatkar, R. Schilling, C. Storey, C. Robinson, “A Biomechanical Model That Confirms Human Ankle Angle Changes Seen During Short Anterior Perturbations of a Standing Platform,” Center of Rehabilitation, Engineering, Science and Technology, Clarkson University. 2) Z. Ji, F. Thomas, H. Chaudry, B. Bukiet, “Computational method to evaluate ankle postural stiffness with ground reaction forces,” Journal of Rehabilitation Research & Development, vol. 41, no. 2, pp. 207-214, April 2004. 3) P. Corbeil, M. Simoneau, D. Rancourt, A. Tremblay, N. Teasdale, “Increased Risk for Falling Associated with Obesity: Mathematical Modeling of Postural Control,” IEEE Transactions, vol. 9, no. 2, June 2001. 4) C. Gruneberg, J. Duysens, F. Honegger, J.H.J. Allum, “Spatio-Temporal Separation of Roll and Pitch Balance-Correcting Commands in Humans,” Journal of Neurophysiology, July 2005. 5) C. Storey, A. Hollister, C. Robinson, N. Witriol, D. Anderson, “A representation for multilinked systems with arbitrary revolute joints in human and arthropod limbs,”