4. Results
advertisement

Behavioral insights in route choice models
with real-time information
Eran Ben-Elia1, Yoram Shiftan2* & Ido Erev3
1
Mr. Eran Ben-Elia, Ph.D Student, Faculty of Civil & Environmental Engineering,
Technion - Israel Institute of Technology, Technion City, Haifa, 32000, Israel.
2*
Dr. Yoram Shiftan, Associate Professor, Faculty of Civil & Environmental
Engineering, Technion - Israel Institute of Technology, Technion City ,Haifa, 32000,
Israel.
3
Dr. Ido Erev, Professor, Faculty of Industrial Engineering & Management, Technion Israel Institute of Technology, Technion City ,Haifa, 32000, Israel.
(* author for correspondence: shiftan@technion.ac.il)
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Abstract
This paper deals with the behavioral aspects of drivers’ decision making processes
when faced with Advanced Travel Information Systems (ATIS). Route-choice models
can be improved with realistic behavioral assumptions. However, different choices arise
when decisions are taken on the basis of information compared to those taken on the
basis of experience. An experiment was designed to investigate route choices relying on
a description of travel time variability and also on personal experience through feedback.
The results show information has a positive effect and is more evident when participants
lack experience on the distributions of travel times. Information seems to increase initial
risk seeking behavior, reduce initial exploration and contribute to larger between subject
risk-attitudes differences. These findings have important implications for ATIS design
especially in the conditions characterized by non recurring congestion.
1
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
1. Introduction
Suppose a driver is faced with real-time information regarding the choice between
two routes from work to home: a faster route (F) and a slower route (S). The average
travel times on the faster route is predicted to be 25 minutes and on the slower one - 30
minutes. The driver has no specific obligation to arrive home on a specific time, but
obviously would like to drive the least amount of time. Suppose also that the driver is
provided with real time information regarding the travel time ranges (the deviation
around the mean value). The ranges are 5 or 15 minutes for each route. Based on the
above information we can construct three possible travel scenarios by combining travel
time means and ranges (see Table 1). For the purpose of this study these scenarios are
defined as:
1. Safer-Fast (faster route has a low travel time range compared to the slower
route;
2. Risky-Fast (faster route has a high travel time range compared to the slower
route;
3. Low-Risk (both route have equal and low travel time ranges).
What would the expected proportion of choices of the fast route, referred to as P(Fast),
be in each case?
The problem to predict a driver’s route choice although at first glance simple is not
trivial. Rational choice and decision making has been at the core of modeling travel
behavior in general and route choice in particular. In route choice studies, many
modeling applications consist of the wide family of discrete choice models. These
include first, the classic Multinomial Logit Model (Daganzo & Sheffi, 1977) and its
applications: C-logit (Cascetta et al., 1996), IAP logit (Cascetta and Papola 1998) and
2
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Path-Size Logit (Ben- Akiva & Bierlaire, 1999). Second, the General Extreme Value
theorem (McFadden, 1978) to whom MNL is also affiliated, and its applications: Nested
logit (Ben Akiva & Lerman, 1985); Cross-Nested Logit (Vovsha, 1997), General Nested
Logit (Wen and Koppelman, 2001) and Paired Combinatorial Logit (Chu, 1989). Finally,
the recent and promising Mixed Logit or Logit Kernel model with flexible probit like
structures (McFadden and Train, 2000; Ben-Akiva and Bolduc, 1996).
In general, discrete choice models assign each alternative route a utility value
which accordingly sets its choice probability usually with an exponential response rule.
These models are econometrically derived from random utility theory. An individual’s
utility for each route of an origin–destination pair is assumed to have a deterministic (or
observable) component and a random component
or error term, representing
components of drivers’ disutility that are not explained through observed attributes i.e.
individual perception errors, measurement errors and specification errors. Prashker &
Bekhor, (2004) provide an extensive review of random utility models (RUM) and their
application in route choice studies. Discrete choice models provide parsimony and
econometric elegant abstraction of drivers’ behavior, but do not include explicit
abstraction of the effect of the information provided by ATIS. Capturing the effect of the
drivers’ information within the framework of discrete choice models requires additional
behavioral assumptions.
Previous attempts to address the effect of information on drivers’ behavior focus
on three main approaches. The first approach, focuses on the error term in the routes’
utilities functions thus providing information implied less error in the system (e.g. Watling
& Van Vuren, 1993 and see review by Bonsall, 2000). A second approach is to reduce
system error by gaining more knowledge through reinforced learning. For example,
Horowitz (1984) described a simple route choice model over time whereby decisions are
3
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
based on the weighted average of previous travel decisions’ utilities. A third approach
involves direct empirical research.
Recent studies attempt to model the utilities of information and information
acquisition through stated preference in laboratory simulations (e.g. Abdel Aty &
Abdullah, 2004; Peeta et. al., 2000; Tong, 2000; Wong-Wing Gun, 1999; Sirnivasan &
Mahamassani, 1999; Abdel-Aty et. al., 1997; Mahmassani and Liu, 1998). Although
similar in their approach to previous discrete choice studies (without information effects)
these studies enabled perception and processing mechanisms based on principles of
bounded rationality (Simon, 1982), simple heuristics and limited sets of choice rules.
In addition other studies applied fuzzy logic principles like “if-then” rules (Peeta &
Yu, 2005; Lotan, 1993) or dynamic assignment and micro simulation using artificial
agents (Nakayama et, al., 2001; Nakayama & Kitamura, 2000; Nakayama et. al., 1999;
Bonsall et. al., 1997). A few studies attempted to investigate information impacts using
revealed preference field studies of real locations or ATIS systems (Fujii & Kitamura,
2000, Kraan et. al., 1999; Deakin, 1997; Wardman et.al., 1997; Khattak & Khattak.,
1996). The current research is designed to contribute to this line of empirical research
by building on the findings of recent behavioral research.
2. Insights from behavioral theory
Returning to our driver’s predicament, three robust behavioral regularities that
have been documented in basic decision research lead to contradicting predictions in
our current example. In this context we refer to maximization as the tendency to
maximize the potential payoff i.e. to choose more often on average the faster route
4
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
The ‘hot stove’ effect
March and Denrell (2001, and see Denrell, in press) demonstrate that when the
feedback available to the decision makers is limited to their obtained payoff, experience
reduces the tendency to select risky (high variance) alternatives. Denrell and March
(2001) demonstrate that this pattern, referred to as the ‘hot stove’ effect, is a natural
consequence of the inherent asymmetry between the effect of good and bad
experiences. In line with the ‘classic’ law of effect (Thorndike, 1898), Good outcomes are
expected to increase the probability that a choice will be repeated and for that reason
facilitate the collection of additional information concerning the value of the alternative
that has yielded the good outcome. Bad outcomes are expected to reduce the probability
that the choice will be repeated, and for that reason impair the collection of additional
information concerning the value of the alternative that has yielded the bad outcome. As
a result, the effect of bad outcomes is stronger (lasts longer) than the effect of good
outcome, and high variability decreases the tendency to choose further the option
associated with a high variability.
A generalization of the ‘hot stove’ effect to the current context implies that
repeated experience without ATIS is likely to lead drivers to deviate from maximization in
the direction of risk aversion. Thus, ATIS is expected to increase maximization in
scenario Risky-Fast, but to have little effect in the other two scenarios.
Risk seeking in the loss domain
In their classical paper on Prospect Theory, Kahneman and Tversky (1979) and
the continuation with Cumulative Prospect Theory (Tversky & Kahneman, 1992) review
the main deviation from rational choice in decisions under risk (one-shot decisions based
on a complete description of the payoff distributions). One of the most important
behavioral phenomena they highlight is the tendency to exhibit risk seeking in the loss
5
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
domain and the reverse case in the domain of gains. For example, most people prefer
the gamble {lose 400$, with probability 0.8; loss nothing, otherwise} over a sure loss of
300$.
A generalization of this observation to the current setting implies that the
availability of ATIS (complete description of the payoff distribution) is expected to
enhance deviation from maximization toward risk seeking. Thus, ATIS is expected to
impair maximization in scenario Safer-Fast.
A partial support to this generalization of Prospect Theory was found in the
research by Katsikopoulos et. al. (2002). The authors provided participants with
descriptive information about the travel time ranges of two routes while the participants
drove once through various traffic scenarios on a driving simulator. They found that In
the case of losses (i.e. an alternative route is on average worse off compared to a
reference route) - risk seeking in route selection emerges when the alternative route is
riskier )i.e. has a higher travel time range) compared to the reference route and risk
averse otherwise.
The payoff variability effect
Experimental study of the effect of experience on human choice behavior in
repeated settings reveal a robust payoff variability effect (Myers et al., 1960; Busemeyer
& Townsend, 1993; and Erev & Barron, 2005). This effect results when an increase in
the variance of the payoff distribution of the possible outcomes appears to move
aggregate choice behavior toward random choice.
Avinery and Prashker (2003) demonstrate the importance of this observation in the
context of route-choice behavior. They show that increasing travel time variability of the
route with a higher expected travel time increases its popularity. Since the payoff
6
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
variability effect is reduced by precise information (Barron & Erev, 2003) it implies that
ATIS will increase maximization in all the scenarios considered here. Moreover it implies
that the effect will be particularly large in Scenarios Risky-Fast and Safer-Fast.
The combined effect
The main goal of the current analysis is to improve our understanding of the joint
effect of the three behavioral tendencies described above. In order to achieve this goal
the current research examines choice behavior in an environment in which the decision
makers receive partial descriptive information, and at the same time can rely also on
their personal experience.
This relatively new approach combines together experience and description in the
decision making process which, up till now, were treated separately. A recent study by
Avinery & Prashker (2006) applied this approach by providing one group of participants
with a single static description of route mean values (but not of their variability) and
subsequently allowing them to gain experience of their preferable route using feedback.
The second group (the control), received only the latter (similar to their 2003 study). The
study found that informed participants tend to prefer the safer and slower route (i.e.
show risk aversion) while non informed ones prefer the risky and fast one (i.e. show the
expected preference for risk seeking).
This study builds on this approach whilst replacing the static information with
dynamic real-time information of the ranges of travel times on available routes,
consequently providing participants with a description of travel time variability as would
appear on a variable message sign (VMS). We believe this will provide a more accurate
representation of plausible travel time information while driving and making route choice
decisions.
7
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
3. Experiment design
The experiment included a simple road network with two routes from work to
home. One route was on average faster, with mean travel time of 25 minutes and the
other slower with a mean of 30 minutes. Participants in the experiment (49 Technion
students) were divided randomly between two groups – one group (N=24) received realtime information before each trial and their chosen route’s randomly drawn travel time
after each choice was made (as a feedback). The other group (N=25) the control
received only the feedback information but no other information regarding the possible
travel times on the routes. No foregone payoff was provided.
The participants’ task was to repeatedly choose between the two routes simulating
commuting days. In order to encourage participants save travel time, each minute
accrued in the experiment was set a cost of 0.1 NIS cents (the average payoff per
participant was about 4.5$ at the time). Each group was faced with three consecutive
traffic scenarios (i.e. repeated measures) as presented in Table 1 in the initial example.
Each scenario was run 100 times so in total each participant provided 300 observations.
The order in which the scenarios appeared was divided in to the 3! possible
arrangements - in total 6 blocks. After each scenario was finished an announcement was
given warning of the beginning of the next scenario. Participants were not informed in
advance how many runs they were expected to complete. This reduced the possibility of
routine and fatigue during the experiment.
The group provided with real-time information received for each of the two routes
the travel time range (the minimum and maximum travel times) as designed a priori for
each scenario. This simulated a simple variable message sign (VMS). In order to allow a
small variation in the provided information the mean of the travel time oscillated
randomly between 0-5 (whole) minutes in respect to the initial scenario design and the
8
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
travel time range changed accordingly. Following the route choice the participant
received as a feedback for his next choice the ‘actual’ travel time on his chosen route but
not of the alternative one. The travel time was randomly drawn (using a uniform
distribution) from the provided travel time range to maintain user confidence in the
information. The same treatments were given to the group without information the only
difference is that they did not receive the VMS message.
As discussed earlier we hypothesize three, partially contradicting, behavioral
tendencies: the ‘hot stove’ effect, risk seeking in the loss domain, and the payoff
variability effect.
4. Results
The following three figures (1,2 and 3) present the average proportions of
choosing the faster route for the 100 trials in each of the three traffic scenario and for
each of the two experimental conditions: with information (and with feedback) and
without information (feedback only). For simplicity the data is presented in blocks of 10
trials each. For the purposes of the analysis we refer to the maximization rate as the
increased propensity to choose the faster route.
As expected, under all scenarios and conditions, the faster route (with the lower
travel time mean) is chosen a significantly higher number of times, over the slower one.
From Figures 1, 2 and 3 it is evident that participants who received no information
behave more or less similarly in all of the three scenarios. The classical learning curve is
obvious as it takes several trials to learn that the faster route minimizes travel times.
Under Risky-Fast, learning appears slower. However, a one way ANOVA did not show
significance of difference between the mean proportions of the three scenarios for the
without information condition (F=1.66, p>0.05). In addition, the means and standard
9
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
deviations for the three scenarios without information are quite similar implying that the
choice behavior appears more homogenous.
As seen in the three figures above, participants who received real-time information
appear to behave differently compared to those that did not receive it. However, the
between group t-test was significant only for Low-Risk (t=3.17, p<0.05).
Within the ‘with information’ group a one way ANOVA shows the difference
between means is significant (F=3.57, p<0.05). A post hoc Duncan test shows that the
mean differences between Safer-Fast and Low-Risk is significant at 0.05 while the
difference between Safer-Fast and Risky-Fast is significant but only at 0.1. The
difference between Risk-Fast and Low-Risk was not significant. Standard deviations are
larger in the ‘with information’ group compared to the ‘without information’ one. This
implies that participants receiving information are more heterogeneous in their choice
behavior compared to the control group.
Table 2 summarizes the results of the average maximization rates for the full data
set (standard deviations are shown in parenthesis).
A mixed model (with fixed and random factors) reveals that the effect of ‘Scenario’
(the repeated effect) is significant (F=7.89, p<0.05) and also the effect of the group
(F=4.44, p<0.05). The effects of the order of appearance (the blocks) and the
interactions are not significant. Furthermore, the estimated 33 covariance matrix
showed significant results only to the variances of the choice proportions of each
scenario but not of their covariance. This implies that participants treated the traffic
scenarios separately as expected.
At the beginning of the experiment (see Figures 1, 2 and 3 above) in all scenarios
the group ‘with information’ has a higher maximization rate compared to the without
10
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
information group. A within group ANOVA of the first trial, representing a one shot choice
based on descriptive information, shows that the difference between the means of the
group ‘with information’ is significant (F=3.14, p<0.05). Under Safer-Fast, 70% choose
the faster route compared to 87% under Risky-Fast. Under Low-Risk the proportion of
the faster route rises to 96%.
A within group ANOVA of the average choice proportions of trials 1 through 10
shows that the differences of means for the group ’with information’ are significant, while
those for the group ‘without information’ are not. A post hoc Duncan test of the group
‘with information’ data shows that the mean differences between Safer Fast and RiskyFast and Safer-Fast and Low-Risk are significant. However, the mean differences
between Risky-Fast and Low-Risk were not. The between group t-tests shows that
under Risky-Fast and Low-Risk, the difference between group means are significant (t=
3.19, p<0.05; t=4.95, p<0.05) but not under Safer-Fast. Table 3 summarizes the results
of the average maximization rates for the first 10 trials in the data set (standard
deviations are shown in parenthesis).
As seen in Figures 1 2 and 3, the group ‘without information’ catches up in the last
50 trials and the information effect is, to some extent replaced by an experience effect. It
also appears that after 50 trials or more the group ‘with information’ has a slightly lower
maximization rate (except under Low-Risk) compared to the group ‘without’. However
this difference is not significant under any of the three scenarios. Table 4 summarizes
the results of the average maximization rate for the last 50 trials in the data set (standard
deviations are shown in parenthesis).
11
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
5. Discussion
The current results highlight two robust deviations from the predictions of the
common application of rational choice in the context of travel behavior. First, the main
behavioral tendency in decisions from experience as demonstrated in the results of the
condition ‘without information’, reflect the payoff variability effect. When comparing the
results of Safer-Fast to Risky-Fast - the increase in the variability of the faster route
reduced the maximization rate (i.e. the proportion of the faster route) and increased the
propensity to choose the slower route. This robust effect has been well documented
(Avineri & Prashker ,2003; Erev & Barron, 2005) in choices situations lacking a
description of the relevant payoff distributions.
Second, the results for the condition ‘with information’ suggest that the initial effect
of information (in the 10 initial trials) is consistent with the prediction of Prospect Theory
and risk seeking in the domain of losses (Kahneman & Tversky, 1979; 1984). The fast
route was more attractive when it was risky (Risky-Fast) than when it was associated
with low variability (Safer-Fast). However, with longer experience behavior moves
toward the predictions of the payoff variability effect. After 50 trials, the evidence for
more risk seeking than risk aversion disappeared. The sole effect of variability was a
reduction in the attractiveness of the faster route.
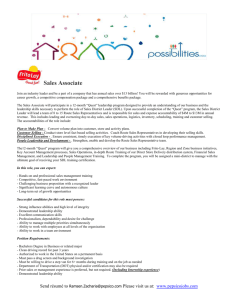
An examination of the net effect of real-time information reveals an interesting
pattern. As demonstrated by Avineri and Prashker (2006) in certain settings information
does not increase the maximization rate. Specifically, as seen in Figure 1, in the last 50
trials, the maximization rate in the Safer-Fast scenario was lower with the availability of
information (and to a lesser extent, as seen in Figure 2, also in scenario Risk-Fast).
Furthermore, Avineri and Prashker (2006) stress that the negative effect of
information can be explained by the claim that information increases risk aversion. The
12
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
comparison of our replication of the scenario run by Avineri and Prashker (2006) - RiskyFast, weakly supports this assertion. However, a comparison of scenario Safer-Fast
(that did not appear in their study) with the other scenarios demonstrates that the
opposite pattern is stronger. The data can be summarized with the claim that the typical
effect of the information is to increase risk seeking. Moreover, in the current study the
initial effect of the additional information was positive for all three scenarios.
We believe that current results suggest that information has three main effects.
First, reducing of initial exploration (and for that reason increases the maximization rate
by inexperienced drivers). Second, increasing initial risk seeking and between-subject
differences in risk attitude.
The main conclusion from the analysis is that the major benefits of providing real
time information with ATIS are specifically for drivers whom lack long term experience.
Drivers that are new to the road network or that have limited knowledge of the travel time
distributions common to it will benefit the most from the provided information. For
experienced drivers whom already have a good knowledge base of the possible travel
conditions on the network the effect of information is somewhat limited. It is worth noting
that when traffic conditions change due to unexpected events like accidents or special
events (example a large sport game) then real-time information plays a crucial role by
expediting the learning process of the drivers on the network. For traffic management
this has high significance since non recurring congestion (in contrary to recurring
congestion) is taking an ever larger role in many urban networks (Lomax & Schrank,
2003). Frequent users and commuters can deal with recurring congestion be reinforced
learning. However, better management of non recurring congestion may be possible by
providing users with real time information. In these circumstances more research is
13
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
necessary to understand the impacts of partially informed users on the general
equilibrium on the transport network.
Continued research
The experimental study has enabled better understanding of the two main effects
taking place in the route-choice decision process – information and experience and their
interaction. However an important step in designing of effective ATIS is the capability to
predict driver behavior. We propose to apply the data collected during the experiment to
estimate a discrete choice model (using mixed logit). The data collected includes:
participants’ socio-economic characteristics (age, gender, car ownership, employment
etc.), route characteristics (mean and variance of travel times), real-time information
(travel time ranges on each route), feedback (chosen routes’ travel time) and route
choices in the three travel scenarios described above. Using this data we can estimate a
model with panel data (repeated observations for same individuals) heterogeneity
(taking account of the different subject effects - random or fixed) and state dependence
(currant choices depend on outcomes of previous choices). The main obstacle is to
account for the decreasing importance of the descriptive information as more experience
is gained over time. This can be handled with a weighting function.
Acknowledgments
The authors would like to thank Merav Ben-Elia (Software Engineer) for her candid
assistance in developing the computer simulation program and the staff at the behavioral
research laboratory and the Max Wertheimer Minerva center for Cognitive Research for
assistance in carrying out the experiment.
14
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
References
Abdel-Aty M., Abdallah M. H., (2004), Modeling drivers’ diversion from normal routes under
ATIS using generalized estimating equations and binomial probit link function, Transportation,
31, 3, 327-348.
Abdel-Aty M., Kitamura R., Jovanis P. (1997), Using stated preferences data for studying the
effect of advanced traffic information on drivers’ route choice, Transportation Research C, 5,
1, 39-50.
Avineri E., Prashker, J.N. (2003), Sensitivity to uncertainty: The need for a paradigm shift.
Transportation Research Record, 1854, 90-98
Avineri E., Prashker, J.N. (2006), The impact of travel time information on travelers’ learning
under uncertainty, Transportation, 33, 4, 393-408
Barron, G., Erev I., (2003), Small feedback-based decisions and their limited correspondence
to description-based decisions, Journal of Behavioral Decision Making, 16, 3, 215-233
Ben Akiva M. Lerman S. R. (1985) Discrete Choice Analysis: Theory and Application in Travel
Demand, MIT Press, Cambridge, Mass.
Ben- Akiva, M. and Bolduc, D. (1996) Multinomial probit with a logit kernel and a general
parametric specification of the covariance structure. Working Paper.
Ben- Akiva, M. and Bierlaire, M. (1999) Discrete choice methods and their applications to
short term travel decisions, in: W. Hall (Ed.) Handbook of Transportation Science, pp. 5– 33,
Dordrech, Kluwer.
Bonsall P., Firmin P, Anderson M., Plamer I., (1997), Validating the results of a route choice
simulator, Transportation Research C, 5, 6, 371-387.
Bonsall P. (2000), Information systems and other intelligent transport system innovations, in
Hensher D. A. & Button K. J. eds., Handbook of Transport Modelling, Pergamon, New York.
Busemeyer, J. R., & Townsend, J. T. (1993), Decision field theory: a dynamic- cognitive
approach to decision making in an uncertain environment, Psychological Review, 100, 3, 432459.
Cascetta, E. and Papola, A. (1998) Implicit availability/ perception logit models for route choice
in transportation networks. Paper presented at the 8th World Conference on Transport
Research, Antwerp, Belgium.
Chu, C. (1989) A paired combinatorial logit model for travel demand analysis, in: Proceedings
of the Fifth World Conference on Transportation Research, vol. 4, 295– 309 (Ventura, CA:
Western Periodicals Co.).
Daganzo, C. F. and Sheffi, Y. (1977) On stochastic models of traffic assignment,
Transportation Science, 11, 253– 274.
Deakin A. K., (1997), Potential of procedural knowledge to enhance Advanced Traveler
Information Systems, Transportation Research Record, 1573, 35-43
Denrell, J. (2006), Learning effects on risk taking, Psychological Review, in press.
Denrell J, March J. G. (2001), Adaptation as information restriction: The hot stove effect,
Organization Science, 12, 5, 523-538.
Erev I., Barron, G. (2005), On adaptation, maximization and reinforcement learning among
cognitive strategies, Psychological Review, 112, 4, 912-931.
15
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Fujii, S., Kitamura, R. (2000), Anticipated travel time, information acquisition and actual
experience: Hanshin expressway route closure, Osaka-Sakai, Japan, Transportation
Research Record, 1725, 79-85.
Horowitz J.L., (1984), The stability of stochastic equilibrium in a two-link transportation
network, Transportation Research B, 18, 13-28.
Kahneman D, Tversky A (1979), Prospect theory – an analysis of decision under risk,
Econometrica, 47, 2, 263-291.
Kahneman D, Tversky A (1984), Choices values and frames, American Psychologist, 39, 4,
341-350.
Katsikopulos K. V., Duse-Anthony Y., Fisher D. L., Duffy S. A., (2002), Risk attitude reversals
in drivers’ route choice when range of travel time information is provided, Human Factors, 44,
3, 466-473.
Khattak A. J., Khattak A. J. (1996), Comparative analysis of spatial knowledge and en route
diversion behavior in Chicago and San Francisco – Implications for Advanced Traveler
Information Systems, Transportation Research Record, 1621, 27-35.
Kraan M.,van-der-Zijpp N., Tutert B., Vonk T., van-Megen D. (1999), Evaluating networkwide
effects of variable message signs in the Netherlands,Transportation Research Record, 1689,
60-66
Lomax T, Schrank D. (2003), 2002 Urban Mobility Study, Texas Transportation Institute.
Lotan T. (1993), Models for route choice behavior in the presence of information using
concepts form fuzzy set theory and approximate reasoning, Transportation, 20, 2, 129-155
Mahmassani, H. and Liu, Y. (1998) Dynamics of Commuting Decision Behavior under
Advanced Traveler Information Systems, Transportation Research C, 7, 2, 91- 107.
McFadden, D., 1978, Modeling the choice of residential location, in: A. Karlqvist, L. Lundquist,
F. Snickkars and J. Weibull (Eds) Spatial Interaction Theory and Residential Location, 75– 96
(Amsterdam: North Holland).
McFadden, D., K. Train (2000), Mixed MNL models of discrete response, Journal of Applied
Econometrics, 15, 5, 447- 470.
Myers, J. L., & Sadler, E. (1960), Effects of range of payoffs as a variable in risk taking,
Journal of Experimental Psychology, 60, 306– 309.
Nakayama S., Kitamura R., Fujii S. (1999), Drivers learning and network behavior: dynamic
analysis of the driver-network system as a complex system, Transportation Research Record,
1676, 30-36
Nakayama S., Kitamura R. (2000), Route choice model with inductive learning, Transportation
Research Record, 1725, 63-70
Nakayama S., Kitamura R., Fujii S. (2001), Drivers route choice rules and network behavior:
do drivers become rational and homogeneous through learning, Transportation Research
Record, 1752, 62-68.
Peeta S., Ramos J. L., Pasupathy R. (2000), Content of variable message signs and on-line
driver behavior, Transportation Research Record, 1725, 102-108.
Peeta, S. and Yu, J.W. (2005). A hybrid model for driver route choices incorporating en-route
attributes and real-time information effects, Networks and Spatial Economics; 5, 1, 21-40.
Prashker J., Bekhor S. (2004), Route choice models used in the stochastic user equilibrium
problem: A review, Transport Reviews, 24, 4, 437– 463.
Simon H. (1982), Models of Bounded Rationality, MIT Press Cambridge Mass.
16
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Srinivasan, K. K., Mahmassani H. S.(1999). Role of congestion and information in tripmakers'
dynamic decision processes: An experimental investigation, Transportation Research Record,
1676, 43-52.
Thorndike, E. L. (1898), Animal intelligence: An experimental study of the associative
processes in animals. Psychological Monographs, 2, 4.
Tong C. C. (2000), A study of en-route dynamic route choice behavior under the influence of
traffic information, PROCEEDINGS OF THE 7TH WORLD CONGRESS ON INTELLIGENT
SYSTEMS, HELD TURIN, ITALY, 6-9 NOVEMBER, 2000,. 8p
Tversky A., Kahneman D. (1992) Advances in prospect theory – cumulative representation of
uncertainty, Journal of Risk and Uncertainty, 5, 297-323.
Vovsha, P. (1997) The cross- nested logit model: application to mode choice in the Tel- Aviv
Metropolitan Area, Transportation Research Record, 1607, pp. 6– 15.
Watling T. R., Van Vuren T. (1993), The modeling of dynamic route guidance systems,
Transportation Research C, 1, 2, 159-182.
Wardman M., Bonsall P. W, Shires J. D., (1997), Driver response to variable message signs: a
stated preference investigation, Transportation Research C.,12, 5 389-405
Wen, C. and Koppelman, F. (2001) The generalized nested logit model, Transportation
Research Part B: Methodological, 35, 7, 627– 641.
Wong-Wing G. (1999), Driver attitudes towards display formats of real-time traffic information
systems, Transportation planning and Technology, 21, 1, 1-19
17
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Table 1: Three possible travel time scenarios:
Scenario
Travel Time Ranges (minutes)
Fast – 25 min. Slow – 30 min.
Safer-Fast
5
15
Risky-Fast
15
5
Low-Risk
5
5
Table 2: Average maxmization rate (full data set)
(Average proportion of faster routes’ choices)
Scenario
Conditions (groups)
With information
Without information
.844
.838
(.165)
(.128)
.881
.817
(.217)
(.128)
.966
.880
(.069)
(.115)
<0.05
-
Safer-Fast
Risky-Fast
Low-Risk
Sig. within
Sig. between
<0.05
Table 3: Average maxmization rate (first 10 trials)
(Average proportion of faster routes’ choices)
Scenario
Safer-Fast
Risky-Fast
Low-Risk
Sig. within
Conditions (groups)
With information Without information
0.729
.636
(.219)
(.173)
0.850
.660
(.228)
(.187)
.912
.672
(.136)
(.196)
<0.05
-
Sig. between
<0.05
<0.05
Table 4: Average maxmization rate (last 50 trials)
(Average proportion of faster routes’ choices)
Scenario
Safer-Fast
Risky-Fast
Low-Risk
Sig. within
Conditions (groups)
With information Without information
0.873
.914
(.168)
(.137)
0.885
.886
(.226)
(.154)
.986
.954
(.046)
(.091)
<0.05
-
18
Sig. Between
-
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Figure 1: Safer-Fast
Avg Proportion Fast Route
1.00
0.95
0.90
0.85
0.80
0.75
0.70
0.65
0.60
with information
0.55
without information
0.50
10
20
30
40
50
60
70
80
90
100
Blocks of 10 trials
Figure 2: Risky-Fast
Avg Proportion Fast Route
1.00
0.95
0.90
0.85
0.80
0.75
0.70
0.65
0.60
with information
0.55
without information
0.50
10
20
30
40
50
60
Blocks of 10 trials
19
70
80
90
100
Behavioral insights in route choice models with real-time information
Eran Ben-Elia, Yoram Shiftan & Ido Erev
Figure 3: Low-Risk
Avg Proportion Fast Route
1.00
0.95
0.90
0.85
0.80
0.75
0.70
0.65
0.60
with information
0.55
without information
0.50
10
20
30
40
50
60
Blocks of 10 trials
20
70
80
90
100