Generalized Zero Sets Location and Absolute Robust Stabilization
advertisement

Automatica, Vol. 27, No.3, pp. 501-512, 1991
Printed in Great Britain.
(xx)5-1~8/91
$3.00
Pergamon
@
1991
International
Federation
of
Automatic
+
Press
0.00
pIc
Control
Generalized Zero Sets Location and Absolute
Robust Stabilization of Continuous Nonlinear
Control Systems*
GILA FRUCHTERt
An analytic method for finding the location of the generalized zero set of a
vector-valued function is applied here to find the complete feasible set of
sectors of nonlinearities which allows absolute robust stability of a Lurie
type system with linear part under uncertainty conditions, according to the
Popov criterion.
Key Words-Control
system design; nonlinear control systems; robust control; stability; zeros.
intersections of sets
Abstrad-We describe an analytic method for finding the
location of the generalized zero set of a vector-valued
function which depends on m real variables and (n + k)
complex parameters. The method is applied to a robust
design problem of a nonlinear Lurie type continuous-time
system,with the linear part under uncertainty conditions. We
find the complete feasible set of sectors of the nonlinearities
which allows robust absolute stability of the system,
according to the Popov criterion. Illustrative numerical
examplesare provided.
Yp= U f;.~(O)J peP,
qeQ
where Yp are zero sets (Fruchter, 1988; Fruchter
et al., 1987a, 1991a,b) recently developed into a
tool and used in solving problems in control
theory. Establishing an algorithm to finding M
makes more applications possible in a wide
variety of areas.
Walach and Zeheb (1982) consider this
problem for m = 2 and G = ~z, and when
f(q, p, s) is a complex-valued function, holomorphic in q and p and a polynomial in the
complex variable s = S1 + jsz, and when each Qi
1. INTRODUcnON
V ARIOUS
PROBLEMS
which arise in system theory
can be reduced to the problem of locating the
generalized zero set, defined as follows.
A generalizedzero set. Given an open set G in
~m, m ~ 1, closed sets QI, . . . , Qn, PI, . . . , Pk
in t=CU{oo}
with Q=QIX"'XQn,
P=
PI X . . . X Pk and a continuous function f : Q x
P x G-+ ~d, the generalized zero set of f
relative to Q, P and G is defined by
and ~ is either a piecewise-smooth
simplearc or
a Jordan domain bounded by a piecewisesmoothcurve. They were able to find necessary
conditionsfor the boundaryof M and therebyto
developan algorithmfor determiningM in some
cases. Their results have already been instrumentalin control theory.
Here, we derive a new algorithm for locating
M for continuouslydifferentiablevector-valued
functionsf and quite generalparameterspacesQ
and P.
The method is applied to a problem of
robustnessof absolute stability of Lurie type
(Lurie, 1954)continuousnonlinearsystems,with
linear parts under uncertainty conditions. By
uncertaintywe meanthat the transferfunctionof
the linear part may have as coefficients
parameterswhich maytake valuesin a givenset.
We find all the feasible set of sectors of
nonlinearities,for which absoluterobuststability
of the systemunderuncertaintyconditionsin the
M = {s e G c ~m :f(q, p, s) = 0
for some q in Q and all p in P}.
If we let fq,p(s) = f(q, p, s), q e Q, pEP, s e G,
then
In other words the set M can be written as
.Received 23 January 1990; revised 6 July 1990, received
in final form 17 September 1990. The original version of this
paper was not presented at any IFAC meeting. This paper
was recommended for publication in revised form by
Associate Editor P. Dorato under the direction of Editor H.
Kwakernaak.
t Department of Mathematics, Technion-Israel Institute
of Technology, Haifa, 32{xx) Israel. Currently with the Dept.
of Aerospace, University of California Los Angeles, Los
Angeles, CA 90024, U.S.A.
-;01
502
G. FRUCHTER
linear part is ensured, according to the Popov
criterion (Popov, 1961). From the engineering
standpoint, such a result will provide the
designer of such a system with an excellent
design flexibility, in choosing the optimal robust
sector considering design constraints.
A partial solution to this problem was given in
Siljak's work (Siljak, 1969a,b, 1989). Siljak's
method gives sufficient conditions for absolute
robust stability, according to Popov criterion, for
a restricted class of transfer functions, with
respect to the form of the appearance of the
uncertainty parameters. This is the price of using
Kharitonov
type solution by imbedding
polytopes of dimensions equal to the number of
the uncertainty parameters plus two, in the
solution set.
The method proposed in this paper gives
sufficient and necessaryconditions for absolute
robust stability with respect to the uncertainties
in the linear part, according to Popov criterion.
The method is unrestricted to the form in which
the uncertainty parameters may appear in the
transfer function. The complete set of sectors of
the nonlinearities is selected from the twodimensional set:
~= ~+ X ~\V = {(k, q) E IR+ X IR:k-1
+ Re [(1 + jwq)G(jw, r)] > 0,
Vw ~ 0, Vr E ~9'},
where r is the vector of all uncertainty
parameters and ~9' denotes the parameter space
in which r may take its values. The set V is a
corresponding two-dimensional zero set of points
(k, q) in IR+ X IR.It is determinedby the analytic
methodsdescribedin (Fruchter et al., 1987a,
1988,1991a,b) and illustratedin this paper.The
two-dimensionalgeometricinterpretationcan be
doneat any numberof uncertaintyparameters.
The discretecaseof this problem was treated
in the previous works (Fruchter et al., 1987b,
Fruchter, 1988).
This paperconsistsof five sections.In Section
2 we presenta brief summaryon the methodof
"zero setslocation" (Fruchter, 1988;Fruchteret
al., 1987a,1991a,b). In Section3 we describea
method of finding the generalizedzero set M.
The method is illustrated by two numerical
exampleswith engineeringmeaning.In Section4
we utilize the algorithm in absolute robust
stabilization of continuous-time Lurie type
nonlinear systems. A numerical example is
provided. The paper closesin Section 5 with
appropriateconcludingremarks.
2. PRELIMINARY RESULTS
We present a brief summary of the method
"zero sets location" (Fruchter, 1988; Fruchter et
ai., 1987a, 1991a,b), including notations and
results needed in this paper.
A. The zero set
Definition 1 (Fruchter et al., 1991a). Let
K = Kl X . . . X Kn be a set in {;n = {; x . . . xC
(n times), where each Ki is a closed set in
t = C U {oo} whose boundary aKi is a finite
union of piecewise-smooth simple curves and
piecewise-smoothclosed simple curves. Let G be
an open set in ~m and let f:K x G- ~d U {oo}
be a continuously differentiable function. The
zero set off = (h, . . . ,fd) relativeto K and G is
then defined by
V = {seG c: ~m :3A eK such thatf(A, s) =O}.
Lemma (Fruchter et al., 1991a). V is a closed set
relative to G.
B. Zero setslocation-Outline of theprocedure
There are two principal stagesin locating V.
In the first stage one finds an (m - 1)-
dimensional
set L, L c: V, whichcontainsthe
boundaryof V relativeto G. Next, by picking a
point in each of the connectedcomponentsof
G\L one checks which of these connected
componentsare included in V and which are
outside V. This stage leads to the original
problem in a lower dimension, which can be
carriedout reductivelyuntil the final solution is
reached. Let Dl"'"
Dk be the connected
componentsof G\L which are included in V;
then
k
V=UDiUL.
i=1
In order to find the set L one needsnecessary
conditions on the boundary of V. In the
following we present two theorems which
providesuchnecessary
conditions.
C. Necessary conditions on the relative boundary
of the zero set
Theorem1 (Fruchteret al., 1991a).Let K, G, f
and V be as in Definition 1. Supposethat SOis a
point in the boundary of V relative to G and
Ao= (A~,..., A~) is a point in K such that
f(AO, SO)= O. Suppose that for i = 1, . . . , t,
1s t s n, A? belongs to the boundary of a
connectedcomponentof Ki havinga parametric
representation
Ai
= Ai(lJ;), Os lJiS 1
and that for i = t + 1, . . . , n, 0 s t s n, A? E
intKi.
Supposethat lJ~,. . . , lJ~are numbersin the
openintervals(0, 1) suchthat
A.(lJ~
I I ) =A~I
503
Generalized location and absolute robust stabilization
and x?, y? are real
numbers
such that
for
.
0
.0
1= e+ 1,...,n, A o;=x;+JY;.
Let c5 e (0, 1) be suchthat (8?- c5,8? + c5)c:
(0, 1) for i = 1, . . . , e and (x?- c5,x?+ c5)x
(y? - c5,Y?+ c5)c: K;
for
i = e + 1, . . . , n.
Denote
'go= ('g?, . . . , 'g~)
-- (80v...,
80e,xt'+vYt'+l,...,Xn,Yn
0
0
0
0)
and
; = (;1' . . . , ;r)
=(01"",
connected
Oe,Xe+l,Ye+l,'"
, Xn,Yn)
l;i-;71<15, i=1,...,r.
Then, at points (AO,SO),where the derivatives
of Ai(Oi) exist, we have the relations
(i) j;(AO, SO)= 0, i = 1, . . . , d
a(ft,...,
components
of
aKi"
. . . , aKit'
respectively,and for e = O.We denotethe union
of all the (m - I)-dimensional sets, which are
includedin V, by Lo.
Next, consider a finite set of points, say
for each point). E ~r such that
(ii)
D. An outlineof theprocedureof determiningL
Let f, K and G be as in Theorem 1 and
Theorem2. For each e in {I,..., n}, choosea
subset of e different indices from the set
{I, 2, . . . , n}. For each index i in this subset,
pick a connectedcomponentof aK;. Finally,
applyingTheorem 1 and/or Theorem2 we can
find a set of points (St,..., sm) which is
(m - I)-dimensionalin ~m. We do the samefor
all possiblechoicesof e, 1:5 e:5 n, of the indices
it, . . . ,it' from the set {I,..., n} and of
fd) (AO,SO)= 0,
a(;i"'..,;id)
1~i1<..
.<id~r.
At pointswhereany of the coordinatesis 00, the
differentiability of f and the conditions (i) and
(ii) shouldbe evaluatedafter suitablechangesof
variablesof the form z-1/z are performed.
Theorem 2 (Fruchter et al., 1991a). Let K, G,
f=(ft,...
,fd)' V, (AO,sO), .;o=(.;?,...,
.;~)
and ';=(';1'.."
.;,), r~2, with A=A(.;) and
A ° = A( ';O)be as in Theorem 1, when d ~ 2.
Let k and q be integers such that 1 :5 k :5 d 1
and d - k :5 q :5 r - 1. Suppose that there is a
(m + r - q )-dimensional neighborhood N =
N1 X Nz
of
the
point
(';10°,SO)=
(';~+1' . . . , .;~,SO)and a vector-valued function
cp:N -+ ~q, such that
-
(i) cpis continuously differentiable on N
bt,
n
. . . ,bp, in U aKi whichcorrespond
to the
i=t
points where the derivatives of Ai( (JJ do not
exist. In the sequel, we will label such points
"bad" points. Suppose that bt E aKt. By
substituting At = bt, f(A, s) = 0 reduces to a
(vector) equation in the (complex) unknowns
A2, . . . , An and s, s E ~m. We apply Theorem 1
and/or Theorem 2 to the new equation at the
point (bt, A2, . . . , An) and obtain (m -1)dimensional sets in ~m, included in V, in a way
similar to the previous procedure for Lo. Next
we repeat the procedure for b2, b3, etc. up to
bp. Denote by Lt the union of all these
(m - I)-dimensional sets for bt, . . . , bp.
Next, we substitute in f(A, s) = 0 two bad
points, say bnl for Ai and bnkfor Ak' such that
i:#:k, and apply Theorem 1 and/or Theorem 2.
We denote by L2 the union of all the sets, which
are included in V. Next, we choose three bad
points, then four bad points, etc., and obtain
L3' . . . , Lo. Let
P
L=ULio
i=O
(ii) cp(';1.°, SO)= (.;If, . . . , .;~)
(iii) v(A(cp(.;I,S), .;1),S)=O for every (.;I,S)
in N,
where
'gl = ('gq+
, ;,)
and
Then, since each Lj is (m -I)-dimensional
included in V, so is Land
and
ao V c: L c: V.
whereaov = av n G.
v = (!k+l, . . . , !d).
Let g: N - ~k be definedby
g(SI, s) = u(A(q;(SI, S)SI),s)
whereu = (ft, . . . , !k) andg = (gl, . . . , gk).
Then at points (SI.O,SO)we have
3. GENERALIZEDZERO SETSLOCAnON
A. The generalized zero set
Let Q = QI X . . . x Qn and P = PI X . . . X
each Q; and P; is a closed set in t = U {oo}. For
each i the boundary aQ; and ap; is a finite union
of piecewise-smooth simple curves and
piecewise-smoothclosed simple curves. Let G be
an open set in ~m and letf:Q x P x G~~d U
{oo} be a continuously differentiable function.
II:::
gj(SI.O,SO)= 0, j = 1, . . . , k
a(gl'..'
a(Sil'
,gk)
(SI.O,SO)=O,
. . . , SiJ
q+1~il<..
.<ik~r.
Pk
be sets in cn= t x . . . x t (n times) and
tk = t x . . . x t (k times), respectively, where
G.
504
FRUCHTER
The last assumptionmeansthat Q x P x G has
an open neighborhood, where f(q, P, s) =
(ft(q,p,s),... ,fd(q,P,S» has continuouspartial derivativeswith respectto all real coordinh
.2
2 Pi'
1 Pi'
2 and Si, were
ates qi,1 qi,
qi -- qi1 + jqi,
Pi=p}+jpf,
q=(ql,...,qn)eQ,
P=
(PI' . . . , Pk) e P and s = (Si,. . . , sm)e G. The
generalizedzerosetoff = (ft,... ,fd) relativeto
Q, P and G is then definedby
M = {s e G c ~m :Vp e P, 3q e Q
suchthat f(q, P, s) = O}.
(1)
In other words,SeM if and only iff(p, q, s) = 0
for somepoint q in Q and everypoint p in P.
Our main purposein this sectionis to derive
an algorithm which will enableus to determine
and describethe generalizedzero set M of the
vector-valuedfunction f, for certain parameter
spacesQ and P, and opensetsG. This objective
will be carried out by redefiningM in terms of
certainzero sets.
B. The procedure 01 determining the generalized
zero set
Let Q, P, G, land M be as in Section 3A. In
particular it is assumed that Q x P x G has a
neighborhood where I
is continuously
differentiable.Supposethat P ::) P is an open set
in tk for whichI is continuouslydifferentiablein
Q x P x G. Let V be the zero set of I relative to
Q and G
x P, i.e.
V= {(s,p)e G X Pc ~m X Ck:3q e Q
such that f(q, p, s) = O}.
(2)
Excluding points in which one of the
coordinatesof P = (PI, . . . , Pk)E P is
00,
denotepoints (s,p) E G x P by
(S,P) -- (Sl,...,Sm,PvPv...,Pk,Pk,
1
2
1
2)
we
where (pI + jp~) = Pi E p;\{oo}.
Note that the differentiability of f at points
(q, p, s) where at least one of the coordinates of
(q,p) is
00
to G
x P. On
the boundary of
Lemma 1. V is a closedset relative to G x
P.
The proof is as in Fruchter et al. (1991a, Lemma
IIA), where the idea is to show that V contains
eachof its limit points which are in G x P.This
follows from the compactness of Q (being a
closed subset of tn) and the continuity of f.
The set V has all the properties that the zero
set V considered in Fruchter (1988) and Fruchter
et al. (1987, 1991a,b), and presented in Section
2. has. including the fact that V is closed relative
relative to
The following proposition is an immediate
consequence
of (1) and (2).
Proposition1. Let Q, P, G, I, M and V be asin
3A. Then
M={seG:Vpep,(s,p)eV}.
(3)
Now, let L be an (m -I)-dimensional set, as
described in Section 2, i.e. L is included in
V
and includesthe boundary of the zero set V.
Then L is a finite union of solutionsof equations
obtainedfrom Theorem1 and/or Theorem2. In
other words L, and consequentlythe relative
boundary of
V,
is a finite union of (m - 1)-
dimensionalsetsof the form
{(s,p)eGxi':cpj(p,s)=O},
wherethe equationscPj= 0 are derivedfrom the
conditionson the relative boundaryof V which
Theorems 1 and 2 provide. From the implicit
function theorem it follows that cPj are
continuously differentiable real valued functions.
Therefore, in many cases, the zero set
V can
be
expressed as a finite union and intersection of
the sets
V;={(s,p)eGxP:q:I;(p,s)~O}.
(4)
UsingProposition1 we obtain, in this case,that
M can be expressedby a correspondingfinite
union and intersectionof the sets
M;={seG:VpeP, q:I;(p,s)~O}.
(5)
The complementof M; in G, denoted by S;,
becomes
S;=G\M;={seG:3peP,
Note that
q:I;(p,s»O}.
cp;(p,$) > 0
or at points (q,p, s) for which
f(q, p, s) = 00, is checked by means of a change
of variables of the form z-+ liz, z E C.
V
G X P we havesimilar conditionsto thosestated
in Theorems1 and 2. Therefore,in order to find
the location of V in G x P we may apply the
methodbriefedin Section2.
is equivalentto
qJj(p,s)+n=O
Denote
forsomene[-oo,O),
hi(n, p, S) = CPi(P,S) + n.
(6)
Then Si becomes
Si = {s e G: 3p e P, 3n e [-00,0)
such that hi(n, p, s) = O}.
It is easy to see that
Sj = U Sf
.,<0
(7)
505
Generalized location and absolute robust stabilization
where
where
Sf = {S E G: 3p E P, 3n E [-00, E]
such that h;(n, p, s) = O}.
(8)
The set Sf is recognizedas a zero set, presented
in Section2 of the real-valuedfunction hi. In
conclusion the sets Mi = G\Si and therefore M,
canbe found by the methodpresentedin Section
2.
In conclusion, M can be found by the
following steps.
Step 1: Choose P and determine the cor-
Ma= {s e G: Vp ePa, 3(q1' q2) e Q
such that !(Q1, Q2,p, S1,S2)= O},
The set Ma is recognized as a generalized zero
set of the complex-valued function f. In order to
find Ma, and therefore .,tl, we apply the
procedure presented above.
Step 1: We set P = ~ and find the set
v = {(Sl, S2,p) E G x ~: 3(q1' q2) E Q
such that !(Q1, Q2,p, Sl, S2)= O}.
responding set V [see (2)].
Step 2: Write V as a finite union and
intersection of sets V; [see (4)].
Step 3: Write M as a finite union and
intersectionof setsMi [see(5)].
Step4: Determinethe functionshi from !Pi[see
(6)] and write the complementsSi of Mi as a
union of the zero setsSf, on E< 0, [see(7) and
(8)].
Step5: DetermineeachSi and Mo and then M,
by Step3.
In the following we illustrate the procedureof
findingM by two numericalexamples.
In Fruchter et at. (1987a,Example2) we found
this set and we obtainedthe following result:
V = {(Sl, S2,p) E G x ~: -0.3 + p(0.4 - O.OSsJ
+ 1/s2$0 or -0.1+p(0.2-0.02sJ
+ 1/s2$0}.
Step2: The set V can be written as a union of
two setsV1and V21namely
V = V1U V21
where
VI = {(SI' S2,p) E G x~:
C. Numericalexamples
The following example is derived from a
possibleformulation of an absolutestability test
of a certain nonlinear system by Jury-Lee
criterion (Jury and Lee, 1964).
Example 1. Let G = {s = (S1'sJ E ~2: S2>O},
let Q = Q1 X Q2' where
and
V2= {(Sl' S2,p) E G x~:
CP2(P,Sl' S2)
= -0.1 + p(0.2 - O.O2sJ+ 1/s2:sO},
Step 3: The set MiX, can be written as a union of
two sets Mf and M'i, namely,
where
Mf = {(S1, S2)E G: Vp E Pa' CP1(P,S1, S2):5 O}
and let P = [0,00). Let [: Q x P x G- ~2 U {oo}
be defined by
[(qt, q2, P, St, S2)= p[(0.3-0.05sJ
and
M~ = {(S1, S2) E G: Vp E Pa' CP2(P,S1, S2):5 O}.
Now, let M} =
+ (0.1-0.03sJ Re qJ - (0.2 + 0.1 Re qJ
n Mf
and M2 =
a>O
+ l/s2 + q2'
We want to find the following set:
.M= {s E G: Vp E P, 3(q1' q2) E Q
suchthat f(Q1, Q2,p, S1,S2)= O}.
n M~, then
a>O
from (9) follows that
.J,l= M} U M2.
Step 4: The functionshi, i = 1, 2 will have the
form
h}(n, p, s) = -0.3 + p(0.4 - O.O&J+ 1/s2+ n
Determinationof the set .M. Let Pa = [0, a]. It
is easyto seethat
p = U Pa'
a>O
and
h2(n,p, s) = -0.1 + p(0.2 - 0.02s})-1/s2 + n.
Now, the complementof Mf in G, denotedby
Sf, will be
Hence
lX>O
= -0.3 + p(0.4 - O.OSsJ
+ 1/s2:$O}
MiX=MfUM'i,
Ql={qleC:lqll=l}
Q2= {q2e C:Req2~ O}U {oo},
.;tl = n MlX,
qJl(P, SI' S2)
(9)
S.'!= G\Ma=
.
U s!,.a
I
£<0
,
i=12
,
G. FRUCHTER
506
where
Sf,a = {(Sl' S2)E G: 3p E [0, a], 3n E [-00, E]
such that hi(n, p, s) = O}.
Si = G\Mi = U U Sf,a. i = 1, 2
a>Oe<O
The setsSi, i = 1, 2, are obtainedfrom Sf,a by
and cf-
G. For findingSf,a we usethe procedurebriefed
-
in Section 2. As was mentioned above Si is
cf-
from
Sf' a
by
taking
E
0-
Sz= 10/3.
As outlined in this procedure, first one finds
the set L. In the presentexampleL
= Lo U Ll
U
L2. For finding Lj, j = 0, 1, 2, we apply Theorem
1, with d = 1 (see Section 2).
Since
an =1+0,
i = 1, 2,
(10)
we obtain immediately by Theorem 1 that
Lo=eJ.
Also, it is readily verified that
h;(-oo,p,St,SZ)*O,
i = 1,2.
+ 1/sz + £ = O.
h;(E,p,SI,S2)=0, O<p<a,
i=I,2
(12)
and for L2 we havethe cases:
h;(E,0,SI,S2)=0, i=I,2
h;(E,a, SI, S2)= 0, i = 1, 2.
(13)
(14)
First, we treat the casei = 1.
The equationsof Theorem1 whichcorrespond
to the case(12) are
h1(E,p, S1'S2)= -0.3 + p(0.4 - O.O&J
+ 1/s2+ E = 0
ahl =0.4 -0.0&1 = o.
ap
Taking £-0-,
we obtain
~-
~.= 3(S2- 10/32
-
-1
0.8as2'
Hence, taking (1'-++00, if S2:#10/3, we obtain
S1= 5.
(15)
(16)
From (15) and (16), taking E-+ 0-, we obtain
Ll = {(5, 10/3)}.
Now, the equations of Theorem 1 for the case
(18)
Therefore, from (17) and (18) we obtain
L2 = {(S1' S2)E G: S1= 5 or S2= 10/3}.
And in conclusion,
L = {(S1' S2)E G: S1= 5 or S2= 10/3}.
The set L which is a one-dimensional set, is
depicted in Fig. 1 and divides G into four
domains Di, i = 1, . . . , 4. In order to decide
which of the domains Di belongs to S1, we
choose arbitrary point in each of the domains Di
and check whether these points belong to S1. It
is readily verified that
3
(11)
Therefore,from (10) and (11) we obtain that in
the derivationof L, we haveto consideronly the
following cases.
In the derivationof L1 we haveonly the case:
(17)
The equations of Theorem 1 for the case(14) are
reduced to
hl(£, aI, Sl' Sz)= -0.3 + a(0.4 - O.OBsJ
and
+00.
ahi
we obtain
+00.
Step 5: Determination of Sf,a and Si, i = 1, 2.
The sets Sf,a, i = 1, 2, are zero sets of the
continuously differentiable real-valued functions
hi, respectively, relative to [-00, E] X [0, cf] and
obtained
hl(£, 0, Sl, SZ)= -0.3 + 1/sz + £ = o.
Taking £-0-,
The complement of Mi in G, denoted by Si' is
then given by
taking E-O-
(13) are reduced to
81= U Dj,
j=1
The complement of S1 in G is dashed in Fig. 1
and is given by
M1 = D4 = {(S1, S2) E G: S1~ 5 and S2~ 10/3}.
For the case i = 2 we have similar computations. We obtained that S1c~,
therefore
M1 :::>
M2. Hence
.;tl
= M1 U M2 = M1 =
D4'
And in conclusion,
.;tl = {(S1,S2)E G: S1~ 5 and S2~ 10/3},
namely the dashed region in Fig. 1.
507
Generalized location and absolute robust stabilization
1. If P and M are subsetsof ~ then V is
a subset of ~2 [see (2) Section 3B] and M can be
found directly from the geometrical interpretation of V. This is an immediate consequenceof
Proposition 1(3). In such cases we are able to
find M immediately after Step 1, as it will be
illustrated in the following example. In consequence, in this case, we do not need the
closednessof the set P.
Lo=0.
Therefore, in the derivation of L, we have to
considerthe following cases:
In the derivationof Ll we havethe cases
f(ql' 0, p, s) = 0, 0 < ql < a
(19a)
Example 2. Let G={sER+:s>O},
let Q=
Q1 x Q2' where Q1 = Q2 = [0,00) and let P = R.
Let f: Q x P x G-+ R U {oo} be defined by
(20a)
Remark
we obtain immediatelyby Theorem1 that
f(ql'P,P,S)=O,
O<ql<a
andfor L2 we havethe cases
f(O, 0, p, s) = 0
f(q1' q2' p, s) = S-1 - 6/(36qf + (5 - qf)2)
+ p(5 - qf)/(36qf + (5 - qf)2) + q2.
We want to find the following set:
oM
= {s E G: Vp E P, 3(q1'
Determination of the set oM. Let Qi = [0, (1']
and Qg= [0, fJ]. Then, Q1= U Qi and Q2=
U Qg. Hence
a>O
8>0
,J,t = U MiX,fl,
ix>O
fl>O
MiX,fl= {s E G: Vp E P, 3(ql'
such that f(ql'
q2) E Qf
x Q~
q2' p, s) = O}.
According to Remark 1, the set MiX,fl is
recognized as a generalized zero set of the
real-valued functionf. In order to find MiX,fl, and
therefore ,J,t, we need to use only the Step 1 of
the procedure presented above.
Step 1: VVe have P = P =~. Let
q2' p, s) = O}.
'-'
a>O
t!>o
f(a, 0, p, s) = 0
(2Oc)
f(a, p, p, s) = O.
(20d)
is equivalentto the equation
f*(qi, p, s) = s-1(36qi+ (5 - qif)
- 6 + p(5 - qi) = O.
va,/J.
The set Va.t! is recognized as a zero set of the
continuously differentiable real-valued function f
(21)
Hence, we obtain by Theorem 1 that, in case
(19a), we have in addition to (21) the equation
af* -- ~-l/'1j:.- "I,
_
8
2
oJ
\-'V
~\-'
- 'fIll
,,2\\ - Yn -~ (\
v.
1.,.,\
q1
From
(21) and (22) we obtain the solution
p2S2
- 72ps + 576 + 24s = O.
In the case(20a)we obtain
/(0,0, p = a) = S-l - 6/25 + piS = 0
or
Then
v=
(20b)
ands > 0, only (19a)and (20a)are meaningful.
Now, in the case(19a)the equation
f(ql' 0, p, s) = S-l - 6/(36qi + (5 - qif)
+ p(5 - qi)/(36qi+ (5- qif) = 0
ViX,fl= {(s, p) E G x~: 3(ql' q2) E Qf x Q~
such that f(ql'
f(O, p, p, s) = 0
It is readily verified that when a-jo +00, p-jo +00
q2) E Q
such that f(q1' q2' p, s) = O}.
where
(19b)
p
= 6/5 - 5s-1.
(24)
From (23) and (24) we obtain
L = {(s, p) E G x R :p2S2- 72ps+ 576
+ 24s = 0 or p = 6/5 - 5s-1}.
relative to Qf X Qg= [0, IX]X [0, (3] and G x ~.
Therefore, for finding Va.t!, we use the
algorithm briefed in Section2. From Va.t!, by
taking IX- +00and (3- +00,we obtain V.
Determinationof va.t! and V. As outlined in
the procedure,first one finds the set L. In the
presentexampleL = Lo U L} U Lz. For finding
Lj' j = 0, 1,2, we apply Theorem 1, with d = 1.
(SeeSection2.)
Since
The set L which is a one-dimensionalset, is
depictedin Fig. 2 and divides G x ~ into four
connecteddomainsDj, i = 1, . . . , 4. In order to
decidewhichof the domainsDj belongsto V, we
choosearbitrarypointsin eachof the domainsDj
andcheckwhetherthesepointsbelongto V. It is
readilyverified that
af =1*0
The set V is dashedin Fig. 2. From this sketch
and Proposition1 we can concludeimmediatelv
all?
(18)
-
2
V=UD;UL.
'_1
G. FRUCHTER
508
uncertainties, is studied in this section. Applying
the method of "generalized zero sets location",
we find all the feasible set of sectors of
nonlinearities, for which absolute robust stability
with respect to the uncertainty conditions is
ensured, according to the Popov criterion
(Popov, 1961).
q
A. Systemdescription
A nominal description of a Lurie continuoustime systemwith one nonlinearunit cJ> is defined
by
i = Ax + b</>(
a),
A E ~nxn,
a=cx,
-0
10
20
30
4'0
k
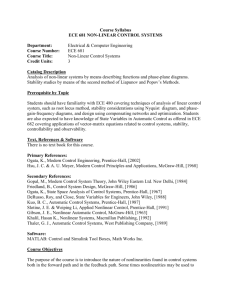
FIG. 2. The zero set V for Example 2 and the connected
components of ~+ x ~\L.
The
J,t
= [30, +00).
Remark. The complement of ,J,l in G has an
engineering meaning which will be explained in
Section 4 (Remark 4).
4. ABSOLUTE ROBUST STABILIZAllON OF
CONnNUOUS NONLINEAR CONTROL SYSTEMS
The nature of the mathematical results of the
previous section seems to be particularly
pertinent to various applications in engineering
system theory. In this section, we apply the
results to one such problem, which is important
from viewpoint of practical design of systems
under uncertainty
conditions
and which is
considered very difficult to carry out. We
consider the problem of robustness of absolute
stability of Lurie type (Lurie, 1954) continuous
nonlinear systems, with linear parts under
uncertainty conditions.
Lurie-Postnikov's
(Lurie
and Postnikov,
1944) concept of the absolute stability of a class
of sector nonlinear (so-called Lurie) systems can
be considered as the concept of the robust global
asymptotic stability with respect to variations,
uncertainties
and
impreciseness
of
the
nonlinearity. Absolute stability of a Lurie system
is tested in the literature for a given (nominal,
unperturbed) mathematical description of the
system. However, it is of utmost practical
importance to consider also the uncertainties and
impreciseness of the parameters of the linear
part of the system. The robust absolute stability
and stabilization
for a continuous
sector
nonlinear system with linear part parameter
b E ~nxl,
a E~
(25a)
CE~lxn.
nonlinearity
(25b)
4>
(Lurie
nonlinearity)
is a
continuous function from ~ to ~ satisfying the
following sector condition:
4>(0)=0
that
x = x(t) E ~n,
and 0<4>(a)a-1<k
for
a:#:O,
for a given positive number k, called sector
number. Note that the above condition restricts
the graph
of the nonlinearity
4>
to
within
specified sector S(k) which lies in the first and
third quadrants of the plane and is bounded py
the a-axis and the line y = ka.
Assume that some or all the entries in A, b, c
are subject to perturbations
and are only known
to be within given intervals.
A perturbed
model of the Lurie continuous
system with one nonlinear unit is given by
i =A(r)x
+ b(r)4>(a)
(26a)
a= c(r)x,
where
r = (rl, . . . , rq),
tainties
of the system,
where
r/EKI
given intervals
and KI=
(26b)
the vector
of all uncer-
may take values in
n KI,
1=1
[ai, fJJ, l=
q, are
1,...,
in ~.
B. Problem statement
Our purpose is to find the complete set of
sector numbers k for which the system (26) is
absolutely robustly
stable for every r E
n
1=1
KI'
and for every q,(a) which satisfies the sector
condition, according to Popov criterion (Popov,
1961). The significance of the solution to this
problem, relative to previous works, was
explained in the introduction.
C. Problem solution via generalizedzero sets
location
We will assumethat A(r) of the system(26) is
a robust stablematrix. If this is not the casewe
509
Generalized location and absolute robust stabilization
first stabilize A(r) robustly by a constant output
feedback h as in (Fruchter et al., 1987a, 1991a)
and replace A(r) by
A *(r) = A(r)
Spopov
= {k E ~+: 3q E~, such that
+ b(r)hc(r).
We consider now the design problem of
finding the sector numbers k for which the
system(26) is absolutelyrobustlystable.For this
purpose we generalize a criterion by Popov
(1961) and apply our generalized zero set
method.
Let A, b, c, 0 and q,(o) be as in (25). Let
GI().) = c(A - U)-lb, where). is the complex
variable, be the transfer function of the linear
part of (25), from the input q,(o) to the output
-0. Assumingthat A is a stablematrix, that is,
all the zerosof the polynomial
dl().)
Corollary 1 Spopov
has the form
= I(A -
q
q>(w,r,q,k»O,
Theorem3 (Popov, 1961).The systemin (25) is
absolutelystableif there exist q E ~ suchthat
1=1
To adopt the above formulation to the
generalizedset location method, we use an
auxiliary variablep, p E [0, 00],in the following
way: Let
I(co, r, p, q, k) = cp(co,r, q, k) + p.
Then
cp(w,r, q, k»O
is equivalentto
f(w, r, p, q, k) = qJ(w,r, q, k)
+ p *O, 'v'pE [0, 00]
).])\
lie in the open left half complexplane Re). < 0,
and assumingthat the rational function G1().)
has no cancelablefactors, Popov (1961)proved
the following theorem.
Vw~OandVrEnKI
and the set Spopov
becomes
Spopov
= f k E ~+: 3q E ~
such that I(w, r, p, q, k) *O,
Vw ~ 0, Vr E
n Kl and Vp E [0, oo]}
(27)
k-1 + Re [(1 + jroq)G1(jro)]> 0
Remark 2. Let
for all Cl)~ O.
Now, let G2(A,r) = c(r)(A(r) - AI)-lb(r) be the
transferfunction of the linear part of (26), from
the input </>(0")to the output -0", and assume
that A(r) is a robust stable matrix, for all
r E
n K1.
An
immediate consequence of
1=1
Theorem 3 is the following.
Corollary 1. The system in (26) is absolutely
robuststableif there exist q E ~ suchthat
k-1 + Re [(1 + jwq )G2(jw, r)] > 0
for all ro ~ 0 and all r E n K/"
/=1
w 2: 0, r E
Ii K/,
/=1
P E [0, 00],
q E ~ and k E ~+. For stable matrices A(r), we
obtain continuously differentiable functions
cp(w, r, q, k), and therefore, f(w, r, p, q, k).
Remark 3. For each point ko in Spopov, our
systemis robust stable with respectto any r in
n K/ and any nonlinearity
/=1
Remark
<p
in the sector S(kO).
4. The complementof the set ."- in
Example 2 is exactly the set Spopovfor an
unperturbed system.
From (27), we obtain that the complement of
Spopov
in ~ + will be
Let
J,(,Popov
= 1R+\Spopov= {k E IR+: Vq E IR, 3w ~ 0,
cp(w, r, q, k) = k-1 + Re [(1 + jwq)G2(jw, r)]
= k-1 + Re G2(jw, r)
- qw 1m G2(jw, r).
Then the objective is to determine the set Spopov
of all points k E ~ +, where
~+={kE~:k>O},
for which (26) is absolutely robustly stable. By
3,
q
E n K/,
3p
E [0, 00]
/=1
suchthatf(w, r,p, q, k) =O}
It is easyto seethat
G.
510
FRUCHTER
set:
where
Il/J
= ~+
X ~\ V = {(k, q) E ~+ X~: k-1
+ Re [(1 + jwq)G(jw, r)] >0,
q
3, E n Kr, 3p E [0,00]
1=1
Vw ~ 0, Vr E
suchthatf(w, r,p, q, k) =01.
The set M" is recognizedas a generalizedzero
set of the continuouslydifferentiablereal-valued
function f relative to Q = [0, a] x (~1 KI) X
[0,00], p=~
and G=~+. Therefore, for
finding M" we may apply the procedure
presentedin Section3. SinceP = ~ and M" is a
subsetof ~, accordingto Remark 2 we need
only the Step1 of this procedure.Let
n Kl}.
In the following we illustrate the procedure of
finding );tpopovby a numerical example.
D. Numericalexample
Considerthe continuoussystemwith uncertainty, described in (26), with the transfer
function G2(J..,r) given by
such thatf(ro, r, p, q, k) = O}
be the zeroset of/relative to [0, a] x (~1 K[) X
[0, 00] and ~ + X ~. Then by Proposition 1 we
where
/(w, r, p, q, k) = k-1 + Re G2(jw,r)
- qw 1mG2(jw, r) + p,
obtain
Ma=
{k E ~+: Vq E~, (k, q) EVa},
and hence
and G2(jw,r) is givenby (29), namely
.,ttPopov
= {k E ~+: Vq E~, (k, q) E V},
(28)
G(2 JW,
"
r ) =-
(l-w2/16+r)
(1 + w2)«1- w2/16f + r2w2)
where
- ;.
v = U Va.
J
a>O
The set V can be obtained from Va by taking
a'-+ +00.
In conclusion, the problem of absolute robust
stabilization of a Lurie type continuous-time
system with one nonlinearity unit, according to
the Popov criterion, is reduced to the problem
of locating a generalized zero set in the open
w(1 + w2)«I-
w2/16)2+ r2w2).
Evidently, for r in [0.001,1/2], G2(A,r) has no
poles in
Re A ~ 0, and in
conclusion
!(w, r, p, q, k) is continuously differentiable
(Remark 2).
The complement of Spopov
in ~ +, denoted by
.Jlpopov, becomes .Jlpopov
= ~ +\Spopov
= {k E
~+:VqE~,
subset~ + of ~. This set can be determined
immediately after Step 1 of the algorithm
presented in the previous section. In this way,
the complete set of sector numbers k can always
(for any numbers of uncertainty parameters in
the linear part, and all forms of their
appearance)be selected from a two-dimensional
(1- w2/16- rw2)
Setting
3w~0,
3r E [0.001, 1/2], 3p E [0, 00]
such that/(w, r, p, q, k) = O}.
= {k E ~+:
Mpopov :
Vq E~, 300 E [0, a],
3r E [0.001,1/2], 3p E [0, 00]
suchthat/(oo, r, p, q, k) = O},
511
Generalized location and absolute robust stabilization
that the equation
we obtain
/(0), r, 0, q, k)
The set M':opovis the generalized zero set of the
continuously differentiable function f, relative to
Q = [0, a] X [0.001,1/2] x [0, 00], P = ~ and
G = ~ +. Following the discussion in Section 3C,
we define
V'"= {(k, q) E ~+ x~: 3(w, r, p) E [0, a]
(1- co2/16+ r)
(1 + co2)«1- co2/16)2+ r2co2)
=k-1
(1- co2/16- rco2)
is equivalent to the equation
I*(co, r, q, k) = k-1(1 + co2)«1- co2/16)2+ r2co2)
x [0.001, 1/2] x [0, 00]
such that!(w, r, p, q, k) = O}.
For finding V'" we apply resultsobtainedin
(Fruchter et al., 1991a)and briefly summarized
in Section2.
As outlined in the procedure,first one finds
the set L. In the presentexampleL = Lo U Ll U
L2U L3. For finding Lj' j = 0, 1, 2, 3, we apply
Theorem 1, with d
co2/16)2+ r2co2) = 0,
+ q (1 + co2)«1-
- (1- co2/16+ r)
- q(1- co2/16
- rco2)=O. (41)
Hence, we obtain by Theorem 1 that, in case
(32), we havein additionto (41) the equations
~
= k-1«1-
w2/16)2+
r2w2)
+
(1 +
W2)
c9w2
x (- ~(1 - (J)2/16)+ r2)
= 1.
+ i6 - q(i6 + r) = 0
Since
.!!l = 1 :#:0
(30)
ap
we obtain immediatelyby Theorem1 that
Lo = 0.
Also, it is readily verified that
l(w,r,+oo,q,k):#:O.
(31)
Therefore,from (30) and (31) we obtain that in
the derivationof L, we haveto consideronly the
followingcases:
In the derivationof L1 we havethe case
I(w, r, 0, q, k) = 0, WE(0, a), r E (0.001,1/2).
(32)
In the derivation of L2 we have the cases
/(w, 0.001, 0, q, k) = 0,
W E (0, iX)
(33)
/(w, 1/2,0, q, k) = 0,
W E (0, iX)
(34)
/(0, r, 0, q, k) = 0,
r E (0.001, 1/2)
(35)
/(iX, r, 0, q, k) = 0,
r E (0.001, 1/2). (36)
Finally, in the derivation of L3 we have the cases
1(0,0.001,0, q, k) = 0
(37)
1(0, 1/2,0, q, k) = 0
(38)
I(a, 0.001,0, q, k) = 0
(39)
I(a, 1/2,0, q, k) = O.
.?L:
ar
= 2w2rk-1(1 + W2)-1-
The conditions (31), (41)-(43), yield a set of
points (k, q) E ~+ X ~ denoted by (44) in Figs
3a,b.
Applying Theorem1 to the cases(33) and (34)
we obtain the equations (41) and (42) with
r
= 0.001
and
r = 1/2,
respectively. These
equationsyield setsdenoted,in Fig. 3, by (45)
and (46), respectively.
Applying Theorem 1 to the case (35) we
obtain the equations(41) and (43) with w = O.
Theseequationyield an empty set.
Finally, for the cases(37) and (38) we obtain
1*(0,0.001, q, k) = k-1- 1.001+ q = 0 (47)
and
1*(0, 1/2, q, k) = k-1 - 3/2 + q = 0,
(48)
respectively.
In conclusion, the set L is given by the union
of (44)-(48). The set L which is a onedimensional set, is depicted in Fig. 3 and divides
~ + X ~ into 15 connecteddomains.In order to
decide which of these domains belong to
V, we
choosearbitrary points in eachof thesedomains
and check whether these points belong to
readily verified that
V=~+
(40)
It is readily verified that when 0:-+ +00, and
k > 0, only (32)-(35) and (37)-(38) are
meaningful.
Lets consider the case (32). It is easy to see
qw2 = o.
V. It
is
x ~\D,
where D is the region dashed in Fig. 3. Hence,
using (28) we obtain
--«POPOV= [0.6,
Therefore,
+00).
if k E Spopov, then,
the considered
512
G. FRUCHTER
which our system is absolutely robust stable is
q
8(0.6).
5. CONCLUSIONS
The generalized zero set introduced in Walach
and Zeheb (1982) is extended here to continuously differentiable scalar and vector-valued
functions,
which depends on several real
variables and complex parameters. A new
method for locating this set is established here.
A design problem for a continuous nonlinear
Lurie type system with a linear part under
uncertainty conditions is considered. The complete feasible set of sectors of nonlinearities, for
which robust absolute stability
is ensured,
according to the Popov criterion, is found. The
generalized zero set method, proposed here, is
applied easily in the solution of this problem.
Acknowledgement-The author is greatly indebted to
Professor Uri Srebro for carefully reviewing this paper and
for his very valuable and constructive comments and
suggestions. The author wants to thank the referee for
bringing Siljak's work to my attention.
q
system is absolutely robust stable, according to
the Popovcriterion, for any nonlinearity4> in the
sector S(k), and any r E [0.001, 1/2]. Following
Fig. 3, we obtain that, the maximal sector in
REFERENCES
Fruchter, G. (1988). Zero sets location and robust
stabilization of control systems. Ph.D. dissertion,
Technion-Israel Institute of Technology, Haifa, Israel.
Fruchter, G., U. Srebro and E. Zeheb (1987a). On several
variable zero sets and application to MIMO robust
feedback stabilization. IEEE Trans. Circ. Syst., 34,
1208-1220.
Fruchter, G., U. Srebro and E. Zeheb (1987b). An analytic
method for design of uncertain discrete nonlinear control
systems.Proc. 15th Cont IEEE, Israel.
Fruchter, G., U. Srebro and E. Zeheb (1991a). Conditions
on the boundary of the zero set and application to
stabilization of systems with uncertainty. J. Math. Anal.
Applic., 160 (to appear).
Fruchter, G., U. Srebro and E. Zeheb (1991b). On
possibilities of utilizing various conditions to determine a
zero set. J. Math. Anal. Applic., 160 (to appear).
Jury, E. I. and B. W. Lee (1964). On the stability of a
certain class of nonlinear sampled-data systems. IEEE
Trans. Aut. Control, 9,51-61.
Lurie, A. I. (1954). Some Nonlinear Problems in the Theory
of Automatic Control. Her Majesty's Stationery Office,
London.
Lurie, A. I. and V. N. Postnikov (1944). On the theory of
stability of control systems. Prikl. Mat. Mech., 8,246-248
(in Russian).
Popov, V. M. (1961). Absolute stability of nonlinear systems
of automatic control. Translated from Automatica i
Telemekhanika,22,961-979.
Siljak, D. (1969a). Parameter analysis of absolute stability.
Automatica, S, 385-387.
Siljak, D. (1969b). Nonlinear Systems. The Parameter
Analysis and Design. Wiley, New York.
Siljak, D. (1989). Polytopes of nonnegative polynomials.
ACC Cont Pittsburg, PA, 193-199.
Walach, E. and E. Zeheb (1982). Generalized zero sets of
multiparameter polynomials and feedback stabilization.
IEEE Trans. Circ. Syst. 29, 15-23.