Bootstrapping Phylogenetic Trees
advertisement

Statistical Science
2003, Vol. 18, No. 2, 241–255
© Institute of Mathematical Statistics, 2003
Bootstrapping Phylogenetic Trees:
Theory and Methods
Susan Holmes
Abstract. This is a survey of the use of the bootstrap in the area of
systematic and evolutionary biology. I present the current usage by biologists
of the bootstrap as a tool both for making inferences and for evaluating
robustness, and propose a framework for thinking about these problems in
terms of mathematical statistics.
Key words and phrases: Bootstrap, phylogenetic trees, confidence regions,
nonpositive curvature.
are interested in the origins of strains of HIV, tuberculosis, influenza and other fast evolving bacteria and viruses. The data in Table 1 came from
a public database of HIV sequences available at
LANL (2002).
1. AN INTRODUCTION TO SYSTEMATICS
The objects of study in systematics are binary rooted
semilabeled trees that link species or families by their
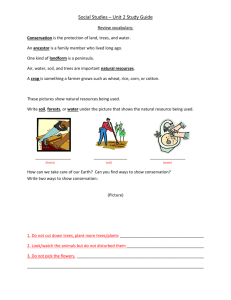
coancestral relationships. For example, Figure 1 shows
a tree with seven strains of HIV.
Two leaf vertices (taxa) that share a parent in the tree
are supposed to be descended from the same ancestor.
The ancestors, and indeed the whole tree, have to be
inferred in the absence of relevant fossil data. Today,
the data used to build the trees are aligned DNA or
protein sequences. These are usually represented as
matrices of letters, where the rows are labeled by
species and the columns represent positions in the
genomic sequence; many of the letters in a column are
the same (see Table 1).
Trees have been used in court cases and environmental surveillance. Some examples of current applications
include:
Phylogenetic trees are the main object of publication
in many biology journals such as Systematic Biology,
Molecular Biology and Evolution, Molecular Phylogenetics and Evolution, Trends in Research in Ecology
and Evolution, Journal of Molecular Evolution, Evolution, Molecular Ecology and American Journal of
Botany.
Although several methods for tree estimation (or inferring trees) are currently available, very little inferential theory is available for quantifying uncertainty for
these trees. The most widely used tool for inference
is a version of the bootstrap introduced by Felsenstein
(1983). Figure 1 shows bootstrap values along the
edges of the tree. These are generally required for publication of a tree estimate in the same way clinical trials
require publication of p values.
The confidence statements made about such trees
are my main focus. Biologists have also begun to
adopt Bayesian methods based on Markov chain Monte
Carlo computations that use parametric evolutionary
models (Li, Pearl and Doss, 2000; Mau, Newton and
Larget, 1999; Yang and Rannala, 1997), but I will not
discuss these methods in depth here. A recent issue of
Systematic Biology (Volume 51, Number 5, October
2002) had many interesting articles on parametric
Bayesian approaches.
The tree in Figure 1 shows bootstrap values at the
inner nodes; for example, 93 means that the species
CONS-CPZ and CONS O4 were siblings in 93% of
• The whale watch team builds phylogenetic trees
from their own databases to classify whale meat
they sample from Japanese fish markets (Baker and
Palumbi, 1994; Baker, Lento, Cipriano and Palumbi,
2000). Over the last eight years they have found,
among others species, blue whale, humpback, minke
whales, beaked whales and dolphins. They report
regularly to the International Whaling Commission
(Lento et al., 1998).
• Immunologists, microbiologists and epidemiologists
Susan Holmes is Associate Professor, Department of
Statistics, Stanford University, Stanford, California
94305, detached from the Biometry Department of
INRA, Montpellier, France (e-mail: susan@stat.
stanford.edu).
241
242
S. HOLMES
+----CONS-CPZ
+---93
+--100
+----CONS O4
!
!
+---49
+---------CONS N2
!
!
+--100
+--------------CONS B34
!
!
!
!
+----CONS A10
!
+-------------55
!
+----CONS A23
!
+------------------------CONS C16
F IG . 1.
Tree with bootstrap values.
the bootstrap replications; 49 means that the sequences
CONS B34, CONS N2, CONS-CPZ and CONS O4
were grouped together in what is called a monophyletic
(a group containing the most common ancestor of
a given set of taxa and all the descendents of that
most recent common ancestor) clade in 49% of the
bootstrap replications. The method of bootstrapping
is the multinomial nonparametric bootstrap as applied
in the binomial setting. For each bootstrap simulation
step, a new data matrix is accumulated by choosing
columns from the original data matrix at random with
replacement, and this is repeated until there are as
many columns in the new matrix as were in the original
data.
In Section 2, I explain the data and the estimation
problem from a statistical viewpoint. I analyze some
of the ways in which biologists make use of bootstrap
values in Section 3. Section 4 shows how some statistical concepts, such as sufficiency and correction
terms, can be used in this problem. Section 5 rephrases
the problem in geometrical terms and Section 6 gives
some constructive suggestions on how bootstrapping
can be used for trees. It also summarizes some of the
caveats presented in this article.
Some of the challenges involved in giving a statistical justification for the basic bootstrapping procedure
are reviewed first.
TABLE 1
Partial HIV amino acid sequences from LANL (2002)
1
2
3
4
5
6
7
CONS A10
CONS A23
CONS B34
CONS C16
CONS N2
CONS O4
CONS-CPZ
KKEEEEALLT
RREEEEALLT
KKEEEEALLT
KKEEEEALLT
RREEEEALLT
CCEEEEVLLT
??EEEEALLT
GADTVVVLEE
GADTVVVLEE
GADTVVVLEE
GADTVVVLEE
GADTVVVIEE
GADTVVVLNN
GADTVVVIDD
INLGGKKKPK
INLGGKKKPK
MNLGGRKKPK
INLGGKKKPK
?QLGGKKKPK
IQLGGKTTPK
IQLGG?RRPK
2. FROM MOLECULAR DATA TO
PHYLOGENETIC TREE
Suppose an observed data set made on s species and
n characters is given: the characters are DNA or amino
acids. The sequences, one for each species, are aligned
before this stage of analysis. For simplicity’s sake,
the aligned sequences are considered to be of equal
length, thus providing a matrix block, for which each
column is often called a character. Table 1 is a little
example taken from LANL (2002). The Markovian
evolutionary model (Li, 1997) is a low-dimensional
(one to six parameters) model for such data. The
metric evolutionary tree (binary rooted tree with edge
lengths) can also be considered a parameter in this
model. If the metric tree is supposed known and the
mutation rates are known, data can be generated by
choosing a character from the stationary distribution
of the transition matrix (suppose A were drawn).
The ancestral column at the root would then be all
A’s, but each row would have a different path to
follow through the tree and changes would occur with
probabilities proportional to the edge lengths. This
simulation procedure is available through the SEQGEN
program (Rambaut and Grassly, 1997).
From the observed data, the maximum likelihood
method attempts to estimate the tree by choosing the
tree with the highest probability of occurring, given the
data, either using prior estimates of the relevant mutation rates or using the data to estimate these parameters. Maximum parsimony is a nonparametric method
that uses a different criterion: it ignores all evolutionary models and searches for the tree with the least number of mutations along its branches needed to explain
the data. Distance-based methods are semiparametric
methods that use the evolutionary model to estimate
distances between sequences and then use methodology akin to hierarchical clustering to build the tree.
I will not go into the details of how a tree is estimated from these data: book-long treatments exist
(Felsenstein, 2003; Page and Holmes, 2000) and a survey for statisticians was presented by Holmes (1999).
The parameter estimated from the data is a binary
rooted tree with the labels (taxa: species or populations) at the leaves, with edge lengths (this is called
the metric tree). If the method does not provide edge
lengths, by default we set all the edge lengths to 1.
Even ignoring edge lengths and considering only the
branching order of the tree, the size of the space is
huge. There are an exponentially large [there are (2n −
3) × (2n − 5) × · · · × 3 × 1 = (2n − 3)!! (Schröder,
BOOTSTRAPPING PHYLOGENETIC TREES
243
1870) different ones] number of combinatorial tree
forms. I denote the metric tree estimate by τ̂ , the true
tree by τ and the space of metric trees T , sometimes
with an index n to denote the number of leaves.
After deciding which estimator to use, a natural
followup question is, “How variable is the estimate?”
Making a confidence statement about the parameter
itself poses numerous quandaries where the classical
paradigms, both Bayesian and frequentist, suffer from
a lack of theory about these general non-Euclidean
parameters. Possible questions are the following:
aligned set of DNA or protein sequences is the assumption of independent, identically distributed columns.
It is well known that these assumptions are violated;
Fitch (1971a, b), for example, showed the existence
of regions that covaried. Some regions are highly conserved (most of the columns are identical all the way
down) and some columns are highly variable, so the
columns are not identically distributed either. These
departures from the i.i.d. situation have been modeled
in many ways. Various suggestions for more believable
models have been included in different procedures:
• What is a sampling distribution in T ?
• What is the natural notion of variability in T ?
• Hidden Markov model for rate variation along the
sequences as discussed by Yang (1994) and
Felsenstein and Churchill (1996) (see Durbin, Eddy,
Krogh and Mitchison, 1998, for a review).
• A Gamma distribution model of rate variation along
sequences was suggested by Yang (1994).
• Fitch and Markowitz (1970), Lockhart et al. (1996)
and Tuffley and Steel (1998) have built covarion
models to deal with sites that vary together.
• Changes in rate variation can be detected and modeled using hot spot or change point detection as, for
instance, in Tang and Lewontin (1999).
These questions would be solved naturally if it were
known how to represent a probability distribution P
and distance d in T . If the sampling distribution Pn of τ̂ were known, the bias and variance could
be written EPn d(τ̂ , τ ), EPn d 2 (τ̂ , τ ). At this stage,
a Bayesian could look at samples from a posterior distribution on trees. In a frequentist approach, the bootstrap usually comes in and provides an estimate for
bias as EPn d(τ̂ ∗ , τ̂ ) and an estimate of variance as
EPn d(τ̂ ∗ , τ̂ )2 .
Because this theory is lacking, biologists have simplified their questions: the simplest one concerns the
presence/absence of a certain monophyletic group c,
called a clade. For instance, in Figure 1 the hypothesis to test is whether the clade c =(CONS A10,
CONS A23) exists in the true tree τ .
Felsenstein (1983) first introduced the use of the
nonparametric bootstrap to assess what biologists call
repeatability: the probability that another such sample
shares the clade with the original sample. In statistical
terms, this is denoted by Pn (c ∈ τ̂ |c ∈ τ̂0 ). Other
biologists hoped that the bootstrap would provide
estimates of what they called accuracy (Hillis and Bull,
1993), that is, P(c ∈ τ |c ∈ τ̂0 ). The two quantities
are linked since the tighter the sampling distribution
around τ , the more probable it is that the same clade
appears again in a second sample, and the more
probable it is that the clade from the estimated tree is
a true clade. However, as in all statistical hypothesis
testing, only P (data |H0 ) is available; an estimate of
P (H0 | data) requires further information.
2.1 Nonidentically Distributed,
Nonindependent Columns
A first statistical reservation to the vanilla multinomial nonparametric bootstrap of the columns of an
The block bootstrap (Künsch, 1989) as explained
clearly by Efron and Tibshirani (1993, pages 98–102)
can provide a nonparametric equivalent for the
multinomial under dependence of the data. Parametric bootstrapping using models such as those from
Felsenstein and Churchill (1996) is also available in
SEQGEN (Rambaut and Grassly, 1997). In practice
there seems to be a strong preference for nonparametric resampling. This may be due to the misguided intuition that using a model that injects more variability
gives safer, more conservative answers.
2.2 Consequences of Dependency
Unfortunately, dependency assumptions destroy the
classical validity of the bootstrap. There are no clear
theoretical bounds on the difference in bootstrap results
between the i.i.d. and dependent cases in this context.
Generally speaking, when the columns are dependent, there are fewer effectively independent components (using the block bootstrap makes this clearer).
A smaller sample means that the estimates are less
accurate, and the bootstrap is no exception. In classical statistical problems such as estimating the mean,
the nonparametric bootstrap itself has errors on the order of 1/n. If the effective n is much smaller than
the number of columns, the actual error may be very
large, and the estimation error also may be exceed-
244
S. HOLMES
ingly large as pointed out, for example, in Nei, Kumar
and Takahashi (1998). Thus the asymptotic consistency results are even less relevant here than in a simple univariate problem. The parameter is of very high
dimension and in the realm of Freedman and Peters
(1984a, b), where the size of the parameter space is
large compared to the amount of data.
3. WHAT IS THE BOOTSTRAP SUPPOSED
TO TELL US?
If a statistician is presented with a problem where the
columns are observations to be resampled, the question
that arises immediately is which distribution are the
columns being sampled from? Certainly no simple
random sampling is in effect, as was clearly pointed
out by Sanderson (1995), so the classical paradigm
by which the bootstrap is justified as proposing an
approximation to the sampling distribution of the
estimate is not in order here. However, since this
method is so widely used by biologists, it is worth
asking which questions it is actually answering, to
better understand why they consider it an essential
feature of phylogenetic methodology.
3.1 Stability or Reliability
Here are some quotes from the systematics literature:
Boostrapping measures how consistently
the data support given taxon bipartitions
(Hedges, 1992).
This is not a test of how accurate your
tree is; it only gives information about the
stability of the tree topology (the branching
order), and it helps assess whether the sequence data is adequate to validate the
topology (Berry and Gascuel, 1996).
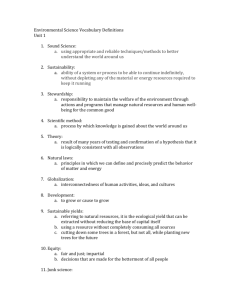
F IG . 2.
A partition of tree space.
The bootstrap test which is a crude way of
testing interior branches, is applicable to all
tree-building methods and is easy to use.
Although this test has been shown to be conservative under certain theoretical frameworks, a conservative test is preferable in
real data analysis, because the evolution of
actual DNA (or protein) sequences never
follows any mathematical model available
(Nei, Kumar and Takahashi, 1998).
In fact, if a more attentive look at the actual way
the bootstrap is used is taken, it is seen much more as
a measure of robustness of the estimator with regard
to small changes in the data. Could a small plausible
perturbation of the data give a different result? The
best way to think about this question is graphically:
partition the parameter space of all possible binary
trees into regions, each region corresponding to a
different tree topology (I abbreviate “different tree
topologies” to “different trees”).
In Section 5 it is demonstrated that this can be
justified mathematically. For the time being, Figures
2 and 3 are a sufficient schematization. The partitioning
Bootstrap values are a measure of support
of a given edge like the measure introduced
by Bremer (1988) that asks how many more
steps a parsimony tree must be for a given
edge to disappear.
High bootstrap values (close to 100%) mean
uniform support, i.e., if the bootstrap value
for a certain clade is close to 100%, nearly
all of the characters informative for this
group agree that it is a group (Berry and
Gascuel, 1996).
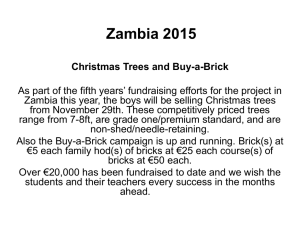
F IG . 3. Data (the black rectangle) being projected on three
possible trees.
245
BOOTSTRAPPING PHYLOGENETIC TREES
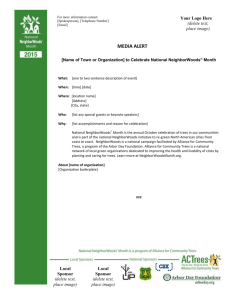
4.60
Taxon 1
Taxon 2
Taxon 3
Taxon 4
AATAATCACACAAGTATATTGTTCTTTAAACCTTGCAAAGAACCCAATATCTACTTCTGA
GGCAATTATGTAAGTATATTGTTATTTAAGCACTGCAGTGAACCCCGTCTCTACAGCTGA
GGTGGCCTCGTAAGTACCTTGTTCTGTAGACATTGCAGATAACCCCGTATGTACATCTCA
AACGATCACGTAAGTGTACTGTTCTTCGAACATAGAGGAGAAGACCGTATCTCCATCGGG
F IG . 4.
represented by Figure 2 differs from Efron, Halloran
and Holmes (1996, Figure 3) in that we are not
considering this to be a partition of the data space,
but of the parameter space onto which the data are
considered to be projected.
If the data are quite far from being treelike, the
data may be hesitating between several different trees.
Figure 3 shows such a situation schematically. Making
a small perturbation of the data could give very
different trees if the estimation function near that data
is not continuous, as pictured in the example shown
in Figure 3. Suppose that the data are at the black
rectangle, and the estimator τ̂ projects the data onto
the closest point on one of the flaps. Then the estimate
could oscillate between the tree flaps if the data are
only slightly perturbed, thus giving a discontinuous
estimator. (This can only be rigorously corrected for
by making the estimate a mixture of trees; for instance,
in this case ( 13 , 13 , 13 ) for the weights associated to the
three components.)
Here is an example of such a data set. The original DNA data are shown in Figure 4. The output from
PHYLIP (see the Appendix) with the parsimony criterion gives the tree described in Figure 5. Bootstrap of
the Example 2 data gives, with the DNAPARS parsimony program, the results presented in Figure 6.
Sets included in the consensus tree
(∗ means on one side, · on the other)
Set
(species in order)
4321
· ∗ ∗∗
· ∗ ∗·
How many times
(out of 1000)
1000.0
572.66
Sets NOT included in consensus tree:
Sets
How many times
(species in order)
(out of 1000)
4321
· · ∗∗
215.16
· ∗ ·∗
212.16
F IG . 6.
One most parsimonious tree found:
+--------Taxon
!
--3
+--Taxon
! +--2
+--1 +--Taxon
!
+-----Taxon
4
3
2
1
requires a total of 43.000
F IG . 5.
If we make one change of nucleotide on the last letter
of the second column from an A to a G, then the PHYLIP
output becomes as shown in Figure 7.
This second data set is an obvious case of the mixture
of three trees, as described above, and the bootstrap
detects it. Bootstrap of the second data set (with the
changed nucleotide) yields the results presented in
Figure 8.
The bootstrap does detect the mixture, not quite with
the right proportions, but indicates the presence of
alternative choices which get lost when just one tree
is chosen.
This discontinuous behavior is also present when
maximum likelihood estimation is used, since the log
likelihoods can be very close, even though the trees are
CONSENSUS TREE:
The numbers at the forks indicate
the number of times the group consisting of the species which are
to the right of that fork occurred
among the trees, out of 1000 trees
+--------------Taxon
!
!
+---------Taxon
+1000.0
!
+----Taxon
+572.7
+----Taxon
4
1
2
3
246
S. HOLMES
3 tree in all found:
+--------Taxon
--3
! +-----Taxon
+--1
! +--Taxon
+--2
+--Taxon
4
+--------Taxon
!
--3
+--Taxon
! +--2
+--1 +--Taxon
!
+-----Taxon
2
3
1
requires a total of 43
4
+--------Taxon
--3
! +-----Taxon
+--2
! +--Taxon
+--1
+--Taxon
3
2
1
requires a total of 43
4
3
2
1
requires a total of 43
F IG . 7.
not close in tree space. Consequently, the likelihood
contours are also discontinuous. This is responsible for
the problem of islands such as those cited in Maddison
(1991).
The quality that biologists call stability or reliability
is what statisticians call robustness. The question
addressed here is, “Do the perturbed data all project
into the same region?” In more precise terms, it would
also be comforting to know which columns produce
these discontinuities. PHYLIP (see the Appendix) has
such a tool in DNACOMP that uses a compatibility
estimation to give an indication as to whether each
column agrees with the final tree or not. This is at
least a first possible level of analysis of residuals or
a search for points with high leverage as in regression.
The output in Table 2 shows that only the third and
fourth columns disagree with the final tree.
As can be seen in Figure 2, some of the boundaries
between tree regions are curved. In addition, points
such as point 3 border more than two regions. For both
of these reasons the simple bootstrap can be applied as
a perturbation tool to assess the stability (in the sense
Sets included in the consensus tree
(∗ means on one side, · on the other)
Set
(species in order)
4321
· ∗ ∗∗
· ∗ ∗·
How many times
(out of 1000)
1000.0
336.83
Sets NOT included in consensus tree:
Set
How many times
(species in order)
(out of 1000)
4321
· · ∗∗
336.33
· ∗ ·∗
326.83
F IG . 8.
TABLE 2
Output from DNACOMP for the above data
0123456789012345678901234567890123456789
∗---------0 ! YYNNYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY
40 !YYYYYYYYYYYYYYYYYYYYY
of continuity, a small perturbation in the data that produces only a small perturbation in the estimate) of the
estimator. We can consider that we are exploring the
neighborhood of the estimator by a simulation experiment as suggested by Efron and Tibshirani (1998). We
can also try to describe the regions and their neighborhoods mathematically; this requires some extra work,
as we will see in Section 5. To quantify robustness,
a notion of distance in parameter space is necessary;
this will also be provided in Section 5. The more
precise study of influence functions (Huber, 1996;
Hampel, Ronchetti, Rousseeuw and Stahel, 1986) is
not available here because a notion of derivative in T
is unavailable.
CONSENSUS TREE:
The numbers at the forks indicate
the number of times the group consisting of the species which are
to the right of that fork occurred
among the trees, out of 1000 trees
+--------------Taxon
!
!
+----Taxon
!
+336.8
+1000.0
+----Taxon
!
+---------Taxon
4
1
2
3
BOOTSTRAPPING PHYLOGENETIC TREES
3.2 Statistical Insight for the Simplest Case:
One Clade
As pointed out by Efron, Halloran and Holmes
(1996), the bootstrap compares the bootstrapped values
to the original estimate, not to the truth. The essential
bootstrap identity is that the bootstrapped values are to
the original estimate what the original estimate is to the
true parameter.
Some parameter has to be chosen to evaluate the
sampling distribution; often in the case of real-valued
parameters this may be the variance of the estimate. If
this variance is small, then we can conclude that the
parameter has a high probability of being close to the
original estimator, so a notion of variability would be
very useful.
From a statistical point of view the simplest possible
context in which to study the bootrapping for trees is
in the statistical test of the presence of a certain monophyletic group c. Suppose that we have decided ahead
of time that we want to approximate the probability
that an observed clade c is in fact in the true tree τ .
A binary parameter θc can be defined that takes on the
value 1 if the clade c is present in the true tree and 0 if
not. Then the question posed by Hillis and Bull (1993)
about the accuracy of the method [P (θc = 1|θ̂c = 1)]
can be answered through the parametric bootstrap by
generating data with many different known trees τ and
using the SEQGEN program of Rambaut and Grassly
(1997) to generate data sets with τ as the generating
process. Then compute for each the bootstrap samples
P (θ̂c = 1|θ̂c∗ = 1). We can thus compare the accuracies
and the estimated bootstrap estimates: what happens
depends on τ , its inner and pendant edge lengths (pendant edges are the edges of degree 1), its topology and
the estimation method used.
Even though we are only interested in whether or
not a clade is present, we have to consider the number
of possible alternative trees, with and without the
clade, because this influences the bootstrap’s validity
(Zharkikh and Li, 1995). In fact, it is as if we
were trying to estimate only one component pj of
a multinomial parameter (p1 , p2 , . . . , p2(n−3)!! ); we
still have to know how many pi ’s are big enough to
compete with pj .
Rodrigo (1993), Efron, Halloran and Holmes (1996)
and Zharkikh and Li (1995) suggested postprocessing
the data to recalibrate by taking into account the number of neighbors and the curvature of the boundaries.
Li and Zharkikh (1995) coined the phrase “number of
effective neighbors” and called this number K. This accounts both for the number of neighboring regions and
247
for the probability assigned to the regions. There are
some trees (in particular balanced trees when estimating with parsimony) that are combinatorially neighbors, but that have such light densities they can be
neglected. Zharkikh and Li (1995) proposed to compute this number by simulation in a procedure called
the complete and partial bootstrap. Efron, Halloran
and Holmes (1996) “looked out” on the regions neighboring the boundary of the estimated tree by first
searching for the boundaries using the bootstrap samples that have trees different from the estimated one
and then using a binary search to find data that are as
close as possible to the boundary. The borderline data
are then used to generate more bootstrap resamples that
will be as different as possible and provide an empirical profile of the neighborhood. This is then used to
recalibrate the original bootstrap values.
Hillis and Bull (1993) and Zharkikh and Li (1995)
reported that the bootstrap estimates of repeatability
were biased. Efron, Halloran and Holmes (1996),
Zharkikh and Li (1995) and Newton (1996) clarified
some of the reasons for this apparent bias, due to
several facts that we will revisit:
• Directly comparing the truth to the bootstrap samples.
• Not accounting for the other edge lengths in the tree
that change the number of possible neighbors and
thus the baseline.
• Not accounting for the curvature of the boundary
between the regions that define different trees.
4. HOW CAN WE EFFECTIVELY SUMMARIZE
BOOTSTRAP DATA?
Most biologists agree that the simplest possible
probability distribution on tree space—the uniform
distribution—is not relevant; a slightly more realistic
one is the Yule process (see Aldous, 2001). Building
a probability distribution on trees is a complex procedure. Further, choosing optimal trees in a model cannot, in general, be decomposed into simpler problems.
This is the essence of what constitutes computationally
intractable problems. The estimation of both the maximum likelihood tree and the parsimony tree have been
proven to be intractable.
Now let us come back to actually trying to summarize a bootstrap resampling distribution on trees—
a Bayesian posterior distribution or a distribution that
could be used to build a frequentist confidence region.
Classically, sufficient statistics arise from a model. We
can also go the other way, following the statistical
248
S. HOLMES
mechanics paradigm of deciding which features are
relevant for a tree, call these S1 (τ ), S2 (τ ), . . . , Sk (τ ),
and then forming the exponential family Z −1 ·
exp( θi Si (τ )) based on these, where Z is the partition constant that makes this a probability measure. See
Lauritzen (1988) for background.
For this to give an effective model, the distribution
must be well characterized by a few summaries, the
sufficient statistics. One example is the exponential
family model P (τ ) = L exp(−λd(τ, τ0 )) defined by
Billera, Holmes and Vogtmann (2001) in analogy to
Mallows’ model. The sufficient statistic is
k
d(τi , τ0 ) = Sk
i=1
for a collection of k trees and a central tree τ0 . So
the estimation depends only on the distances between
trees d. This reduces the data to one number Sk . Of
course, without the assumption of the symmetrical distribution, sufficient statistics are much more complex.
Note that the bootstrap distribution is often summarized by just the frequencies of edges or clades as in
Figure 1. These numbers do not constitute sufficient
statistics for the complete bootstrap distribution. This
has been implicitly understood by several authors who
work on trees. For instance, Penny and Hendy (personal communication) have proposed a nearest neighbor (NN) bootstrap which counts how many times an
edge or a neighboring split occurs (for an example of
its use, see Cooper and Penny, 1997). We see later that
a suitable geometrical enhancement of the mathematical picture of tree space makes such a NN bootstrap
natural.
4.1 Multiple Testing
Showing all the bootstrap values on the tree simultaneously as in Figure 1 makes for an easy misinterpretation. Users may believe that these values can be used
together. If they are considered as ersatz p values, this
carries the flavor of multiple testing without correction
and so should be avoided. When more than one edge
is of interest, a multidimensional approach involving a
certain amount of nonstandard geometry is preferable,
as we see in Section 5.
4.2 Clade Frequencies as a First Level
Approximation
Considering just the clade frequencies as a first
order approximation can be justified by considering
a decomposition of a set of trees X by a Fourier
type analysis in tree space. (This Fourier analysis is
not the same as that proposed by Hendy and Penny,
1993 and Hendy, Penny and Steel, 1994.) Bootstrap
clade frequencies just count the binomial counts of
presence/absence of a given clade in a set B of trees
obtained, for instance, by bootstrap simulation. The
set of these trees can be considered as a function
from the set of all trees into the integers. To each tree
we associate its frequency of appearance in the set.
Diaconis and Holmes (1998, 2002) showed that the
space of all combinatorial trees on n leaves Tn can be
represented as the quotient of the symmetric group on
2(n − 1) by the subgroup B2(n−1) that leaves the pairs
{(1, 2), (3, 4), (5, 6), . . . , (2n − 3, 2n − 2)} invariant.
This is called the matching representation of trees,
where the tree is replaced by all its sibling pairs,
including the inner nodes.
Suppose we are trying to describe a set of 1000
bootstrap trees. This is a function from tree space to R,
where each tree is associated to the number of times
it occurs among the 1000 trees (we allow a fractional
number of trees to be counted, because sometimes the
output from the bootstrap functions can be fractional).
The decomposition of functions on tree space was
given by Diaconis and Holmes (1998). It is a direct sum
decomposition of all functions on tree space,
L(Tn ) =
S 2λ ,
λ(n−1)
where the sum is over all partitions λ of n − 1 (i.e.,
all vectors of integers that sum to n − 1), 2λ =
(2λ1 , 2λ2 , . . . , 2λk ) and S 2λ is the associated irreducible representation of the symmetric group S2(n−1) .
The first few terms in the decomposition can be interpreted as follows:
• For λ = (n − 1), S 2λ counts the number of trees in
the data set.
• For λ = (n − 2, 1), S 2λ counts the number of times
each particular sibling occurs.
• For λ = (n − 3, 1, 1), S 2λ counts the number of
times the sibling pair (i, j ) occurs at the same time
as the pairs (k, l).
• For λ = (n − 3, 2), S 2λ counts the number of times
the sibling pair (i, j, k, l) occurs as a clade.
It is in this sense that the sibling pair frequencies are the
first order approximation to the complete distribution
on trees. It would be useful to be able to say what
proportion of the information contained in the data set
can be reconstructed just by the sibling pair counts.
This Fourier type decomposition closely follows the
249
BOOTSTRAPPING PHYLOGENETIC TREES
analysis of ranking data provided by Diaconis (1989).
To the other extreme is the idea that we could keep all
the data and make useful multidimensional summaries
of it.
5. GEOMETRICAL REPRESENTATION
Trees are high-dimensional parameters, even if they
do not lie naturally in a Euclidean space, so the
best frequentist confidence statements that can be
made about them rely on the notion of a confidence
region Rα defined by statements of the form
P(τ ∈ Rα ) = 1 − α
(Tukey, 1975). Green (1981) suggested the use of
successively peeled convex hulls as ersatz confidence
regions. Take, for instance, the convex hull of all the
parameter estimates in a high-dimensional space. Then
omit the points on the boundary and construct the next
hull, which may contain 90% of the data, for instance,
so that it is a nonparametric 90% convex envelope. This
envelope can then be used to test whether a certain
tree is in the envelope or not. To give a more rigorous
discussion of these continuity–sensitivity issues, it
would be necessary to define both relevant probability
measures and satisfactory metrics on Tn .
Distances can also be useful for summarizing the
bootstrap sampling distribution. In this section, we fill
in the set of combinatorial trees, which is a discrete
set, making the space of trees a continuous space with
a meaningful distance that is always defined. This
work was presented in its mathematical technicality
by Billera, Holmes and Vogtmann (2001).
We start by explaining intuitively what we would
like our geometrical representation to provide. Our
goal is to give a rigorous definition of the boundaries
depicted in Figure 2. Every tree exists as a point in its
own region. The boundaries between regions represent
an area of uncertainty about the exact branching order.
In biological terminology, this is called an unresolved
tree. Two neighboring regions represent neighboring
trees. The notion of neighboring is nearest neighbor
interchange, the rotation distance in Tn . This defines
two trees as neighbors if you can get from one to
the other by contracting an edge to have length zero
and then reexpanding this vertex of degree 4 so that
it has degree 3 again. In Figure 9, we see one such
change. This seems to be the most widely accepted
neighborhood relationship in biology, although other
distances could also be used to define a metric tree
space in the same way. The natural way to vary
F IG . 9.
tree.
Two tree regions separated by a boundary—a degenerate
closeness to the boundary or unresolved tree is to make
the edge lengths e decrease linearly in the direction of
the boundary.
There are three rooted binary semilabeled trees on
three leaves. We arrange them along three half lines
that meet at the origin which represents the star tree.
For this article, to make our geometrical space slightly
simpler, we restrict ourselves to trees with finite branch
lengths. By standardizing the combinational trees to all
have edge lengths of 1, we can build the space of trees
with n leaves as a cube complex Tn , where the cubes
are all of dimension n − 2. For rooted binary trees with
four leaves, we have a set of squares pasted together by
two edges each. Each square in Figure 10 corresponds
F IG . 10.
Three neighboring quadrants.
250
S. HOLMES
to a different branching order and the position within
the square is determined by the coordinates, each
representing one of the two inner edge lengths.
Note that the boundary is shared by two other
trees. The pendant branch lengths do not appear in
this geometrical representation. (To obtain a complete
coordinate system of binary semilabeled trees, one
would have to take the product of Tn with Rn .)
All quadrants have to have the star tree as one of
their corners, so that particular point will have 15
neighboring quadrants. This generalizes and explains
why, at the star tree, the origin of our space, there
are exponentially many cubes attached. On the other
hand, a degenerate tree with only one nonzero edge is
represented as a point on the segment boundary to three
quadrants; thus its neighborhood contains three “flaps.”
In fact, if we have a four leafed tree, but are sure
what the outgroup is, the relevant space is the space of
rooted trees on three leaves. This embedding, shown
geometrically in Figure 11, is important if we consider
the problem of finding all the trees with a given edge
as in Section 2. It is the cube complex [0, 1] × Tn−1
embedded in Tn . This is important to consider when
we talk about the boundary region between the trees
that have the edge c and those that do not.
As we saw in Section 3, Zharkikh and Li (1995) did
a simulation study to find how many trees neighbor
a given tree. This has consequences for the quality
of the bootstrap estimate as also was pointed out in
Efron, Halloran and Holmes (1996). The geometrical
picture allows us to just count the number of neighbors.
We can see that for a tree on four leaves, there can
be either no neighbors except trees with the same
F IG . 12.
One tree in the neighborhood.
branching pattern as in Figure 12 or three neighboring
combinatorially different trees as in Figure 13 or
15 neighboring trees (if all the edges are small and we
are close to the star tree).
Of course, for a tree with two inner edges, this is the
only possible way to have these two edges small. This
same notion of neighborhood containing 15 different
branching orders applies to all trees on as many leaves
as necessary, but which have two contiguous “small
edges” and all the other inner edges significantly larger
than 0. This picture of tree space frees us from having
to use simulations to find out how many different trees
are in a neighborhood of a given radius r around a
given tree. All we have to do is check how many
contiguous edges in the tree are smaller than r. Say
there is just one set of small contiguous edges of
size nr . Then the neighborhood contains
(2nr − 3)!! = (2nr − 3) × (2nr − 5) × · · · × 3 × 1
different types of trees. Thus a point very close to the
F IG . 11.
Embedding of T3 in T4 .
F IG . 13.
A tree with two neighbors.
BOOTSTRAPPING PHYLOGENETIC TREES
251
6. SUMMARY: HOW SHOULD ONE BOOTSTRAP?
F IG . 14.
Cone path and geodesic path in T4 .
star tree at the origin will have an exponential number
of neighbors.
Billera, Holmes and Vogtmann (2001) have shown
that the geodesic distance induced by this filling of
tree space always exists. There is always a path going
through the star tree to go from one tree to another.
Sometimes this is the shortest path, thus the distance;
sometimes there is a shorter path as can be seen in
Figure 14.
The last element necessary to make a rigorous
picture of tree space is the probability measure. We
can define such a measure in the parametric mutation
model of maximum likelihood estimation of trees.
Figure 15 presents a picture of the likelihood contours
in the four leaf case for the Markovian evolution model
with two parameters. Many other uses of tree space
were described by Billera, Holmes and Vogtmann
(2001).
F IG . 15.
Likelihood contours.
First the simulation methods involved in resampling
should follow the biological knowledge as closely as
possible. Block bootstrapping (Künsch, 1989) with
blocks that have size on the same order as the size
of dependent blocks as estimated from real data can
be used. Alternatively, simulations can follow covarion
models (Fitch and Markowitz, 1970) as in Lockhart
et al. (1996) and Tuffley and Steel (1998). These lean
toward models where the observations—columns of
the sequence matrix—are not identically distributed,
but depend on a covariable. In their studies, the
covariate was binary, that is, could be either on or
off. This is also modeled by “hot spots” along the
sequences (see Tang and Lewontin, 1999) and Gamma
rate variations for different sites as in Yang (1994). Any
of these models can be bootstrapped using a parametric
bootstrap. It is more coherent to use the same model at
the resampling stage as at the estimation stage. Thus
the parametric bootstrap as implemented in SEQGEN
by Rambaut and Grassly (1997) is coherent when
doing a maximum likelihood estimation, and even
allows inclusion of rate heterogeneity models such as
Yang (1994) and Felsenstein and Churchill (1996).
A justification for using the multinomial bootstrap
may be that the mutation model itself is being tested.
This leads to confusing conclusions because the alternative is not explicitly defined.
Can we switch paradigms as we deem fit? Starting
with a parametric model for evolution, such as the
one parameter Jukes–Cantor model, does it make
sense, after a tree has been estimated, to switch
to a different paradigm at the validation stage and
use a nonparametric bootstrap to compute confidence
levels on the tree? This is an open problem. Some
statisticians often switch paradigms in the middle
of their studies from data analytic to parametric to
nonparametric. Usually what actually can be proved
is that if the parametric model is correct, there is a
loss in power (sensu statisticae strictu) when switching
to a nonparametric procedure. As for the mixture
between Bayesian and frequentist, empirical Bayes
(Robbins, 1980, 1983, 1985) is a typical example of
the loose boundaries that exist when choosing different
paradigms at different stages of an analysis.
Having settled on the process for generating the new
data, one can think about the statistic to bootstrap.
The simplest case where only one clade is of interest
can be handled by recalibrating Felsenstein’s (1983)
repeatability index as was done by Efron, Halloran
252
S. HOLMES
far from being treelike. Another question that could
be answered is, “Is the convex hull elongated along a
certain direction?”
7. FUTURE RESEARCH
It would be meaningful to consider bootstrapping the
whole procedure, alignment and treebuilding included
as, for instance, in Gong (1986).
In the statistical literature, the theorems that justify
the use of the bootstrap usually state that the distribution of the distance between the true parameter and
the estimate can be well approximated by the distribution between the estimate and the bootstrap resampled
estimate—something that can be summarized as
Distribution(d(τ, τ̂ )) ≈ Distribution(d(τ̂ , τ̂ ∗ )).
F IG . 16.
Bootstrap histogram of d(τ̂ ∗ , τ̂ ).
and Holmes (1996) (for which a PYTHON / R / PHYLIP
program is available from this author) or Zharkikh and
Li (1995). However, this recalibration does not apply
to more extensive use of the bootstrap. In particular, if
several edges are of interest, multiple testing problems
loom and no correction methods are readily available.
The geometric perspective outlined in Section 5 does
provide two alternatives. We can use the distance d
and look at the distribution of distances, as for instance
in the histogram of Figure 16. This gives the average
distance d̄(τ̂ ∗ , τ̂ ) = 0.167 and a 95th percentile of
0.023. Such numbers allow the use of the bootstrap to
test various hypotheses.
In the maximum likelihood context, it is possible
to construct likelihood contours (Ramsay, 1978) such
as those in Figure 15 for the bootstrap resampling
distribution following Hall (1987). Another method
now available through the geometric method is to use
convex hulls. These exist in Tn because the space has
nonpositive curvature as proved in Billera, Holmes and
Vogtmann (2001). Thus methodology based on hull
peeling as in Liu, Parelius and Singh (1999) could
provide a 95% convex hull and one could answer
questions such as, “Does the star tree belong to the
95% convex hull?” If it does, the data are probably very
However, most of the theoretical work involves an assumption of independent, identically distributed variables and some strong assumptions on the properties
of the distance. No actual theory in the phylogenetic
context exists at present, although referring to theoretical arguments in other cases does provide useful insight
into the most sensible simulations to undertake.
Considering the resampling procedure as a means for
making a small plausible perturbation of the original
data and looking at how much the tree changes, or more
precisely whether or not a clade disappears, is in fact
a way to understand the estimator’s continuity (in the
mathematical sense) by simulation and provides quite
a bit of information.
There has also been phylogenetic work on ideas
very similar to Breiman (1996) in statistical learning
theory. Berry and Gascuel (1996) used this idea to find
more robust trees by taking consensii of bootstrapped
data. The method for making consensii is quite crude
(majority rule consensus chooses all the edges that
have more than 50% support). A more refined method
could use a geometric consensus using the distance
defined in Section 5 and minimizing either d(τi , τ )
2
or d (τi , τ ).
The biggest change in statistics as practiced by
statisticians over the last 30 years has been a decrease
in the use of p values. Tukey and his co-workers in
exploratory data analysis have shown the importance
of keeping as much of the data in mind as possible.
A picture is worth a thousand words, and geometry
has much to offer in the complex multidimensional
253
BOOTSTRAPPING PHYLOGENETIC TREES
analysis of DNA sequences through trees, graphs and
their assorted confidence regions. Some open problems
for mathematically inclined colleagues include the
following:
• Can we give quantitative bounds on how much the
new assumptions involved in more realistic models
of sequence distribution change the bootstrap distributions of the distances?
• How can we represent confidence regions and neighborhoods of trees graphically?
• Can we extend some of the work on bootstrapping
trees to networks? This would be useful for analyzing regulatory networks, but also would enable us to
test whether data are actually treelike.
APPENDIX
Some noncommercial programs for constructing,
evaluating and visualizing phylogenetic trees. A very
complete list, including the commercial packages not
mentioned here, can be found at http://evolution.
genetics.washington.edu/phylip/software.html.
(Author: Joe Felsenstein.)
Available on almost all machines as source and executables, its different programs allow computations
of parsimony, distance matrix methods, maximum
likelihood and other methods on a variety of types of
data, including DNA, RNA and protein sequences.
It implements the nonparametric bootstrap and consensus programs used in the examples here. Website:
http://evolution.genetics.washington.edu.
TREE - PUZZLE (Authors: Heiko A. Schmidt, Korbinian
Strimmer, Martin Vingron and Arndt von Haeseler.)
Maximum likelihood phylogenetic analysis using
quartets and parallel computing. Website: http://
www.tree-puzzle.de/.
MR . BAYES (Authors: John Huelsenbeck and Fredrik
Ronquist.)
This program implements a parametric Bayesian
method for finding trees by Monte Carlo Markov
chains that provide both a Bayesian estimate and
the associated posterior distribution. Website: http://
morphbank.ebc.uu.se/mrbayes/.
LVB (Author: Daniel Barker.)
Contruction of phylogenies using simulated annealing. Website: http://sapc34.rdg.ac.uk/lvb/.
SEQGEN
(Authors: Andrew Rambaut and Nick
Grassly.)
Parametric bootstrap for generating nucleotide sequences from a given phylogeny or mixture of phylogenies. As well as the more classical parametric
PHYLIP
models, they allow rate heterogeneity among sites.
Website: http: // evolve.zoo.ox.ac.uk / software / SeqGen/Seq-Gen.html.
TREEVIEW (Author: Rod Page.)
For visualizing trees on a PC or Mac, or with
Linux/Unix with TREEVIEW X. Website: http://
taxonomy.zoology.gla.ac.uk/rod/treeview.html.
APE (Analyses of phylogenetics and evolution) (Authors: Emmanuel Paradis, Korbinian Strimmer, Julien
Claude, Yvonnick Noel and Ben Bolker.)
APE is an R package that provides functions for
reading, writing, plotting and manipulating phylogenetic trees, but not estimating them. It allows analyses of comparative data in a phylogenetic framework. Website: http://cran.r-project.org/src/contrib/
PACKAGES.html#ape.
PAL (Authors: Alexei Drummond, Ed Buckler and
Korbinian Strimmer.)
A collection of Java classes for use in molecular
phylogenetics that enables maximum likelihood,
neighbor joining and least squares analysis. Website:
http://www.cebl.auckland.ac.nz/pal-project/.
NONA (Author: Pablo Goloboff.)
Computes maximum parsimony and consensus trees
on Windows machines only. Website: http://www.
cladistics.com/about_nona.htm.
ACKNOWLEDGMENTS
I thank George Casella for giving me the opportunity
to write this survey. Marc Coram and Persi Diaconis
patiently read several versions of this text. Brad Efron
and Warren Ewens had several helpful discussions on
the bootstrap. My 2002 summer research students,
Martina Koeva, Aaron Staple and Henry Towsner, all
helped with computational aspects of this project.
This research was partly funded by Grant NSF
DMS-00-72569.
REFERENCES
A LDOUS , D. (2001). Stochastic models and descriptive statistics
for phylogenetic trees, from Yule to today. Statist. Sci. 16
23–34.
BAKER , C., L ENTO , G., C IPRIANO , F. and PALUMBI , S. (2000).
Predicted decline of protected whales based on molecular
genetic monitoring of Japanese and Korean markets. Proc.
Roy. Soc. London Ser. B 267 1191–1199.
BAKER , C. and PALUMBI , S. (1994). Which whales are hunted?
A molecular genetic approach to monitoring whaling. Science
265 1538–1539.
B ERRY, V. and G ASCUEL , O. (1996). On the interpretation of
bootstrap trees: Appropriate threshold of clade selection and
induced gain. Molecular Biology and Evolution 13 999–1011.
254
S. HOLMES
B ILLERA , L., H OLMES , S. and VOGTMANN , K. (2001). Geometry of the space of phylogenetic trees. Adv. in Appl. Math. 27
733–767.
B REIMAN , L. (1996). Bagging predictors. Machine Learning 24
123–140.
B REMER , K. (1988). The limits of amino acid sequence data in angiosperm phylogenetic reconstruction. Evolution 42 795–803.
C OOPER , A. and P ENNY, D. (1997). Mass survival of birds across
the cretaceous–tertiary boundary: Molecular evidence. Science
275 1109–1113.
D IACONIS , P. (1989). A generalization of spectral analysis with
application to ranked data. Ann. Statist. 17 949–979.
D IACONIS , P. and H OLMES , S. (1998). Matchings and phylogenetic trees. Proc. Nat. Acad. Sci. U.S.A. 95 14,600–14,602.
D IACONIS , P. and H OLMES , S. (2002). Random walks on trees
and matchings. Electronic Journal of Probability 7 17 pages.
D URBIN , R., E DDY, S., K ROGH , A. and M ITCHISON , G. (1998).
Biological Sequence Analysis. Cambridge Univ. Press.
E FRON , B. and T IBSHIRANI , R. (1993). An Introduction to the
Bootstrap. Chapman and Hall, London.
E FRON , B. and T IBSHIRANI , R. (1998). The problem of regions.
Ann. Statist. 26 1687–1718.
E FRON , B., H ALLORAN , E. and H OLMES , S. (1996). Bootstrap
confidence levels for phylogenetic trees. Proc. Nat. Acad. Sci.
U.S.A. 93 13,429–13,434.
F ELSENSTEIN , J. (1983). Statistical inference of phylogenies (with
discussion). J. Roy. Statist. Soc. Ser. A 146 246–272.
F ELSENSTEIN , J. (2003). Inferring Phylogenies. Sinauer, Boston.
F ELSENSTEIN , J. and C HURCHILL , G. A. (1996). A hidden
Markov model approach to variation among sites in rate of
evolution. Molecular Biology and Evolution 13 93–104.
F ITCH , W. (1971a). The nonidentity of invariable positions in the
cytochromes c of different species. Biochemical Genetics 5
231–241.
F ITCH , W. (1971b). Rate of change of concomitantly variable
codons. Journal of Molecular Evolution 1 84–96.
F ITCH , W. M. and M ARKOWITZ , E. (1970). An improved method
for determining codon variability in a gene and its application
to the rate of fixation of mutations in evolution. Biochemical
Genetics 4 579–593.
F REEDMAN , D. A. and P ETERS , S. C. (1984a). Bootstrapping a
regression equation: Some empirical results. J. Amer. Statist.
Assoc. 79 97–106.
F REEDMAN , D. A. and P ETERS , S. C. (1984b). Bootstrapping an
econometric model: Some empirical results. J. Bus. Econom.
Statist. 2 150–158.
G ONG , G. (1986). Cross-validation, the jackknife, and the bootstrap: Excess error estimation in forward logistic regression.
J. Amer. Statist. Assoc. 81 108–113.
G REEN , P. J. (1981). Peeling bivariate data. In Interpreting Multivariate Data (V. Barnett, ed.) 3–19. Wiley, New York.
H ALL , P. (1987). On the bootstrap and likelihood-based confidence
regions. Biometrika 74 481–493.
H AMPEL , F. R., RONCHETTI , E. M., ROUSSEEUW, P. J. and
S TAHEL , W. A. (1986). Robust Statistics: The Approach Based
on Influence Functions. Wiley, New York.
H EDGES , S. B. (1992). The number of replications needed for
accurate estimation of the bootstrap p-value in phylogenetic
studies. Molecular Biology and Evolution 9 366–369.
H ENDY, M. D. and P ENNY, D. (1993). Spectral analysis of
phylogenetic data. J. Classification 10 5–23.
H ENDY, M. D., P ENNY, D. and S TEEL , M. A. (1994). A discrete
Fourier analysis for evolutionary trees. Proc. Nat. Acad. Sci.
U.S.A. 91 3339–3343.
H ILLIS , D. M. and B ULL , J. J. (1993). An empirical test
of bootstrapping as a method for assessing confidence in
phylogenetic analysis. Systematic Biology 42 182–192.
H OLMES , S. (1999). Phylogenies: An overview. In Statistics
in Genetics (M. E. Halloran and S. Geisser, eds.) 81–119.
Springer, New York.
H UBER , P. J. (1996). Robust Statistical Procedures, 2nd ed. SIAM,
Philadelphia.
K ÜNSCH , H. R. (1989). The jackknife and the bootstrap for
general stationary observations. Ann. Statist. 17 1217–1241.
LANL (2002). HIV database. Available at URL: http://hivweb.lanl.gov/content/hiv-db/mainpage.html.
L AURITZEN , S. L. (1988). Extremal Families and Systems of
Sufficient Statistics. Lecture Notes in Statist. 49. Springer,
Berlin.
L ENTO , G. M., C IPRIANO , F., PATENAUDE , N. J.,
PALUMBI , S. R. and BAKER , C. S. (1998). Taking stock of
minke whale in the North Pacific: The origins of products for
sale in Japan and Korea. Technical Report SC/50/RMP15,
Scientific Committee, International Whaling Commission.
L I , S., P EARL , D. K. and D OSS , H. (2000). Phylogenetic tree
construction using Markov chain Monte Carlo. J. Amer. Statist.
Assoc. 95 493–508.
L I , W. H. (1997). Molecular Evolution. Sinauer, Boston.
L I , W. H. and Z HARKIKH , A. (1995). Statistical tests of DNA
phylogenies. Systematic Biology 44 49–63.
L IU , R. Y., PARELIUS , J. M. and S INGH , K. (1999). Multivariate
analysis by data depth: Descriptive statistics, graphics and
inference (with discussion). Ann. Statist. 77 783–858.
L OCKHART, P. J., L ARKUM , A. W. D., S TEEL , M. A.,
WADDELL , P. J. and P ENNY, D. (1996). Evolution of chlorophyll and bacteriochlorophyll: The problem of invariant sites
in sequence analysis. Proc. Nat. Acad. Sci. U.S.A. 93 1930–
1934.
M ADDISON , D. (1991). The discovery and importance of multiple
islands of most parsimonious trees. Systematic Zoology 40
315–328.
M AU , B., N EWTON , M. A. and L ARGET, B. (1999). Bayesian
phylogenetic inference via Markov chain Monte Carlo methods. Biometrics 55 1–12.
N EI , M., K UMAR , S. and TAKAHASHI , K. (1998). The optimization principle in phylogenetic analysis tends to give incorrect
topologies when the number of nucleotides or amino acids
used is small. Proc. Nat. Acad. Sci. U.S.A. 95 12,390–12,397.
N EWTON , M. A. (1996). Bootstrapping phylogenies: Large deviations and dispersion effects. Biometrika 83 315–328.
PAGE , R. and H OLMES , E. (2000). Molecular Evolution: A Phylogenetic Approach. Blackwell Science, Oxford, UK.
R AMBAUT, A. and G RASSLY, N. C. (1997). Seq-gen: An application for the Monte Carlo simulation of DNA sequence evolution along phylogenetic trees. Computational Applied Bioscience 13 235–238.
R AMSAY, J. O. (1978). Confidence regions for multidimensional
scaling analysis. Psychometrika 43 145–160.
BOOTSTRAPPING PHYLOGENETIC TREES
ROBBINS , H. (1980). An empirical Bayes estimation problem.
Proc. Nat. Acad. Sci. U.S.A. 77 6,988–6,989.
ROBBINS , H. (1983). Some thoughts on empirical Bayes estimation. Ann. Statist. 11 713–723.
ROBBINS , H. (1985). Linear empirical Bayes estimation of means
and variances. Proc. Nat. Acad. Sci. U.S.A. 82 1571–1574.
RODRIGO , A. G. (1993). Calibrating the bootstrap test of monophyly. International Journal for Parasitology 23 507–514.
S ANDERSON , M. J. (1995). Objections to bootstrapping phylogenies: A critique. Systematic Biology 44 299–320.
S CHRÖDER , E. (1870). Vier combinatorische Probleme. Zeitschrift
für Mathematik und Physik 15 361–376.
TANG , H. and L EWONTIN , R. (1999). Locating regions of differential variability in DNA and protein sequences. Genetics 153
485–495.
255
T UFFLEY, C. and S TEEL , M. (1998). Modeling the covarion
hypothesis of nucleotide substitution. Math. Biosci. 147 63–91.
T UKEY, J. (1975). Mathematics and the picturing of data. In Proc.
International Congress of Mathematicians (R. D. James, ed.)
523–531. Vancouver.
YANG , Z. (1994). Maximum likelihood phylogenetic estimation from DNA sequences with variable rates over
sites: Approximate methods. J. Molecular Evolution 39
306–314.
YANG , Z. and R ANNALA , B. (1997). Bayesian phylogenetic
inference using DNA sequences: A Markov chain Monte Carlo
method. Molecular Biology and Evolution 14 717–724.
Z HARKIKH , A. and L I , W.-H. (1995). Estimation of confidence
in phylogeny: The complete-and-partial bootstrap technique.
Molecular Phylogenetics and Evolution 4 44–63.