ELEC 6041 LECTURE NOTES – WEEK 1 Dr. Amir G. Aghdam
advertisement

1
ELEC 6041 LECTURE NOTES – WEEK 1
Dr. Amir G. Aghdam
Concordia University
Introduction
-
Large-scale systems are the multi-input, multi-output (MIMO) systems consisting
of geographically separated components.
-
Examples of large-scale systems include large flexible space structures (LFSS),
communication networks, traffic networks, power networks, etc.
-
When control theory is applied to a large-scale system or a multivariable system
with a large number of interacting subsystems (such as a robot with several
joints), it is often desired to have some form of decentralization. In fact, for such
systems it is not realistic to assume that all output measurements can be
transmitted to every local control station.
-
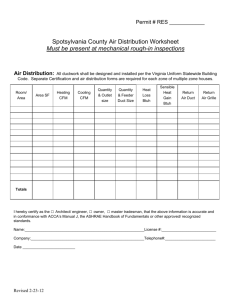
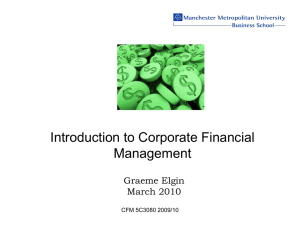
An example of a 2-input, 2-output system with centralized and decentralized
control is given in Figure 1.1(a) and (b), respectively.
R (s )
System
(2-input, 2output)
Y (s )
Controller
(2-input, 2output)
(a)
Controller 1
(1-input, 1output)
R (s )
System
(2-input, 2output)
Y (s )
Controller 2
(1-input, 1output)
(b)
Figure 1.1: (a) A centralized control system. (b) A decentralized control system.
Lecture Notes Prepared by Amir G. Aghdam
2
-
Typical decentralized large-scale systems have several local control stations,
which observe only local outputs and control only local inputs. All the controllers
are involved, however, in controlling the overall system.
-
In this course we will be mainly focused on decentralized large-scale systems.
-
Decentralized control theory was developed in the past 30 years by many
researchers in the field of control systems. The main contributions were initially
made by E. J. Davison and S. H. Wang, followed by other researchers such as
Siljak, Özgüner, Khargonekar, etc. During the first 10 years the classical
decentralized control theory was developed and then some advanced topics such
as decentralized adaptive control, decentralized optimization, decentralized timevarying control, decentralized switching control etc. were investigated.
-
In preparing the lecture notes of this course, the class notes of the courses “largescale systems I” and “large-scale systems II” taught by Dr. E. J. Davison at the
University of Toronto and some additional papers have been used. Furthermore,
some of the assignment problems of this course are the problems that were
designed by Dr. Davison for the above-mentioned courses.
-
Many of the decentralized control methods are similar to their centralized
counterparts. However, there are some important differences too. Both similarities
and differences will be addressed in this course.
-
We will start with some of the important issues in centralized control of
multivariable systems.
-
The state-space model of a LTI system with rational transfer function can be
written as follows:
x& (t ) = Ax(t ) + Bu (t )
y (t ) = Cx(t ) + Du (t )
(1.1)
where x(t ) ∈ R n is the state vector, u (t ) ∈ R m is the input vector, and y (t ) ∈ R r is
the output vector. A ∈ R n×n , B ∈ R n×m , C ∈ R r×n , and D ∈ R r×m are constant
matrices. The state equation (1.1) represents an m-input, r-output LTI system.
Lecture Notes Prepared by Amir G. Aghdam
3
-
Controllability: The state of the system represented by (1.1) is said to be
controllable if there exists a piecewise continuous input u (t ) that can transfer any
initial state x(t 0 ) to any final state x(t f ) . Controllability refers to the ability to
control the system with a control input u (t ) which is a function of the state
vector.
-
The condition of controllability depends only on the matrices A and B . If the
state of a system with the state equations (1.1) is controllable, we say that the pair
( A, B ) is controllable.
-
The system represented by (1.1) is controllable if and only if the n × n.m
controllability matrix [ B AB L A n−1 B ] is full-rank, i.e.:
rank([ B AB L A n−1 B ]) = n
-
Alternatively, it is well-known that the pair ( A, B ) is controllable if and only if:
rank([ A − λi I B ]) = n, i = 1, K , n
where λi , i = 1, K , n are the eigenvalues of the matrix A .
-
Observability: The state of the system represented by (1.1) is said to be
observable if there exists a finite time T such that the initial state x(t 0 ) can be
determined from the output history y (t ), t 0 ≤ t ≤ t 0 + T , given the input u (t ) .
Observability refers to the ability to estimate the state vector.
-
The condition of observability depends only on the matrices A and C . If the state
of a system with the state equations (1.1) is observable, we say that the pair
(C , A) is observable.
-
The system represented by (1.1) is observable if and only if the n.r × n
C
CA
is full-rank, i.e.:
observability matrix
M
n −1
CA
Lecture Notes Prepared by Amir G. Aghdam
4
C
CA
rank
=n
M
CA n −1
-
Alternatively, it is well-known that the pair (C , A) is observable if and only if:
A − λi I
rank
= n, i = 1, K , n
C
where λi , i = 1, K , n are the eigenvalues of the matrix A .
-
All the roots of the characteristic equation of the system represented by (1.1) can
be placed in any desired location in the s-plane using a dynamic feedback if and
only if the system is controllable and observable.
-
Centralized fixed modes (CFM): Consider the system (1.1). For simplicity and
without loss of generality assume that D = 0 . This system is represented by the
triple (C , A, B ) . The set of centralized fixed modes (CFM) of (C , A, B ) is defined
as follows:
CFMs of (C , A, B) = Im×rsp( A + BKC )
K ∈R
where sp( A + BKC ) denotes the set of eigenvalues of ( A + BKC ) .
-
The CFMs of the system (C , A, B ) can numerically be obtained as follows [1]:
1) Determine sp( A) = {λ1 , K , λn } multiplicities included.
2) Select an arbitrary gain matrix K so that A ≈ BKC , where . denotes the
spectral norm of a matrix and is equal to the maximum singular value of the
matrix. This can be accomplished by use of a pseudorandom number
generator and proper scaling of the K matrix.
3) The set of CFM is given by the intersection of the set of the eigenvalues of A
and the set of the eigenvalues of ( A + BKC ) .
-
In the SISO case, the set of CFMs is equivalent to the intersection of the set of
eigenvalues of the system and the set of zeros of the system.
Lecture Notes Prepared by Amir G. Aghdam
5
-
When an eigenvalue of A is not a CFM but it is very close to being a CFM (i.e.
for all gain matrices K one of the eigenvalues of ( A + BKC ) is very close to one
of the eigenvalues of A ) it is called an approximate centralized fixed mode.
-
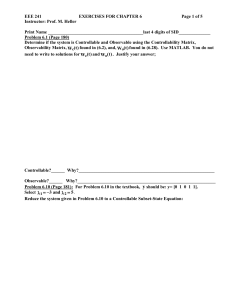
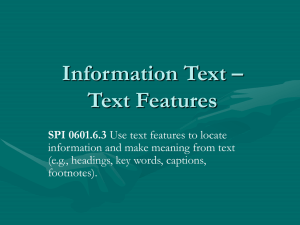
In the SISO case, an approximate CFM is a pole which is very close to a zero of
the system. For example, see the following pole-zero configurations.
Im{s}
Im{s}
s-plane
s-plane
Re{s}
CFM
Re{s}
Approximate CFM
(a)
(b)
Figure 1.2: (a) Pole-zero configuration of a SISO LTI system with a CFM;
(b) pole-zero configuration of a SISO LTI system with an approximate CFM.
-
The definition of a CFM can be used to determine certain properties of the system
(C , A, B ) as follows [1]:
1) To determine if ( A, B ) is controllable: The pair ( A, B ) is controllable iff the
triple ( I n , A, B) has no CFM.
2) To determine if ( A, B ) is stabilizable: The pair ( A, B ) is stabilizable iff the
triple ( I n , A, B) has no CFM in the closed right-half plane of the complex
plane.
3) To determine if (C , A) is observable: The pair (C , A) is observable iff the
triple (C , A, I n ) has no CFM.
4) To determine if (C , A) is detectable: The pair (C , A) is detectable iff the
triple (C , A, I n ) has no CFM in the closed right-half plane of the complex
plane.
Lecture Notes Prepared by Amir G. Aghdam
6
5) To determine if (C , A, B ) is controllable and observable: The system
represented by (C , A, B ) is controllable and observable iff the triple
(C , A, B ) has no CFM. In other words, the mode λ is either uncontrollable
or unobservable (or both) iff it is a CFM of (C , A, B ) .
6) To determine if (C , A, B ) is stabilizable and detectable: The system
represented by (C , A, B ) is stabilizable and detectable iff the triple (C , A, B )
has no CFM in the closed right-half plane of the complex plane.
-
One can also use the definition of a CFM to find the minimal realization of
(C , A, B ) through the following algorithm [1]:
1) Find the CFMs of (C , A, B ) and let them be denoted by {λ1 , λ2 , K , λ p } ,
0< p < n.
2) Use a gain matrix K so that the controllable and observable modes of
(C , A + BKC , B ) are all distinct and disjoint from the CFMs {λ1 , λ2 , K , λ p } .
3) Find the eigenvalues of ( A + BKC )
and let them be denoted by
{λ1 , λ2 , K , λ p , λ p +1 , K , λn } .
4) Find
the
eigenvectors
of
( A + BKC )
for
the
eigenvalues
λi ,
i = p + 1, p + 2, K , n and let them be denoted by xi , i = p + 1, p + 2, K , n ,
respectively.
5) Find
the
eigenvectors
of
( A + BKC ) H
for
the
eigenvalues
~
λi ,
i = p + 1, p + 2, K , n , where the superscript H denotes the Hermitian operator
(transpose of the complex conjugate) and ~ denotes the complex conjugate.
Let these eigenvectors be denoted by yi , i = p + 1, p + 2, K , n , respectively.
6) Normalize the eigenvectors yi , i = p + 1, p + 2, K , n , so that yiH .xi = 1 ,
i = p + 1, p + 2, K , n .
7) The minimal realization of (C , A + BKC , B ) has the order n − p and is given
by (C , A , B ) , where:
Lecture Notes Prepared by Amir G. Aghdam
7
C := C[ x p +1 x p + 2 L xn ]
A := diag(λ p +1 , λ p + 2 , K , λn )
y Hp+1
H
y
B := p+ 2 B
M
H
y n
and the minimal realization of (C , A, B ) is given by (C , A − B KC , B ) .
-
It is to be noted that if the controllable and observable modes of (C , A, B ) are all
distinct and disjoint from the CFMs {λ1 , λ2 , K , λ p } , one can skip Step 2 and go to
the next step by using a zero gain matrix K = 0 .
-
It is also to be noted that if all eigenvalues of A are distinct, one can find the
vectors yi in steps (5) and (6) directly by forming the matrix [ x1 L x p x p +1 L xn ]
and taking the inverse of this matrix. It can be verified that the rows of the inverse
matrix are in fact the vectors yiH , i.e.:
y1H
M
yH
[ x1 L x p x p +1 L xn ]−1 = Hp
y p+1
M
H
y n
Transmission zero: Consider the system (1.1). The complex number λi is defined to
be a transmission zero of (1.1) if there exist an initial condition x(0) = xi and an input
u i e λit
signal u (t ) =
0
-
t≥0
, t ≥ 0 for which the output is equal to zero for all t ≥ 0 .
t<0
It can be shown that the complex number λi is a transmission zero of (1.1) iff the
A − λi I
matrix
C
B
is not full-rank, which means that:
D
Lecture Notes Prepared by Amir G. Aghdam
8
A − λi I
rank
C
-
B
< n + min(r , m) .
D
(1.2)
The vectors xi and ui can be found as follows. From (1.2), it can be concluded
that there exists a nonzero vector pi ∈ R ( n+ r ) such that:
A − λi I
C
B
pi = 0 .
D
xi and ui are obtained by decomposing pi to two vectors as follows:
x
pi = i .
ui
where xi ∈ R n and ui ∈ R r . The proof is given in the appendix.
-
The set of transmission zeros of a system may be empty, contain a finite number
of symmetric complex numbers, or include the whole complex plane.
-
A system with a set of transmission zeros equal to the whole complex plane is
called a degenerate system. Note that even a controllable and observable system
with full rank matrices B and C can be degenerate. Throughout this course we
will assume that the system is non-degenerate.
-
High gain output feedback theorem [2], [3]: Consider the system (1.1) and
without loss of generality assume that D = 0 . Let K ∈ R m×r be an arbitrary matrix
with rank( K ) = min(r , m) . Then if r = m , the finite eigenvalues of A + ρBKC as
ρ → ∞ coincide with the transmission zeros of (C , A, B ) ; if r ≠ m , then for
“almost all” K , the transmission zeros of (C , A, B ) are contained in the finite
eigenvalues of A + ρBKC .
-
Note that this is a generalization of the result for SISO systems in which it is well
known that for high gain output feedback, the finite poles of the closed-loop
system approach the zeros of the system.
-
It can be shown from the definition of CFM that the CFMs of a non-degenerate
square system ( m = r ) are contained in the transmission zeros of (C , A, B ) [1].
Lecture Notes Prepared by Amir G. Aghdam
9
-
It is to be noted that transmission zeros are sometimes referred to as invariant
zeros. The mathematical definition of transmission zeros and invariant zeros are
different but we usually assume that they are equivalent.
-
In MATLAB, the command tzero can be used to find the transmission zeros of a
LTI system with rational transfer function.
Appendix:
-
The inequality (1.2) implies that if λi is a transmission zero of (1.1), then there
exists a nonzero vector pi ∈ R ( n+ r ) such that:
A − λi I
C
B
pi = 0 .
D
(A.1)
Decompose pi to two vectors xi ∈ R n and ui ∈ R r , as follows:
x
pi = i .
ui
Assume now that the initial state in (1.1) is x(0) = xi and the input signal is as
follows:
u e λit
u (t ) = i
0
t≥0
t<0
From (A.1), we will have:
( A − λi I ) xi + Bui = 0, t ≥ 0
Cxi + Dui = 0
.
(A.2)
On the other hand, taking the Laplace transform of both sides of (1.1) we will
have:
x& (t ) = Ax(t ) + Bu (t ) ⇒ sX ( s ) − x(0) = AX ( s ) + BU ( s ) .
This means that:
Lecture Notes Prepared by Amir G. Aghdam
10
( sI − A) X ( s ) = x(0) +
1
Bu i
s − λi
=
1
[(s − λi ) xi + Bu i ]
s − λi
=
1
[ sxi − λi xi + Bu i ]
s − λi
=
1
[−( A − sI ) xi + ( A − λi I ) xi + Bu i ]
s − λi
By using (A.2) the above equation will be simplified as follows:
( sI − A) X ( s ) = ( sI − A)
From the above equation, we have X ( s ) =
1
xi .
s − λi
1
xi which results in:
s − λi
x(t ) = xi e λit , t ≥ 0 .
Therefore, from (1.1) we will have:
y (t ) = Cx(t ) + Du (t ) = Cxi e λit + Dui e λit = (Cxi + Dui )e λit = 0, t ≥ 0
This means that if λi is a transmission zero of (1.1), then there exist an initial
condition x(0) = xi and an input signal u (t ) = ui e λit , t ≥ 0 such that the output is
equal to zero for all t ≥ 0 .
Reference:
[1] E. J. Davison, W. Gesing and S. H. Wang, “An algorithm for obtaining the
minimal realization of a linear time-invariant system and determining if a system
is stabilizable-detectable,” IEEE Trans. Automat. Contr., vol. AC-23, pp. 10481054, Dec. 1978.
[2] E. J. Davison and S. H. Wang, “An algorithm for calculation of transmission
zeros of the system (C , A, B, D) using high gain output feedback,” IEEE Trans.
Automat. Contr., vol. AC-23, pp. 738-741, Aug. 1978.
[3] E. J. Davison and S. H. Wang, “Properties and calculation of transmission zeros
of linear multivariable systems,” Automatica, vol. 10, pp. 643-658, 1974.
Lecture Notes Prepared by Amir G. Aghdam