Error Concealment for Dual Frame Video Coding with Uneven Quality
advertisement

Error Concealment for Dual Frame Video Coding
with Uneven Quality
Vijay Chellappa, Pamela C. Cosman and Geoffrey M. Voelker
University of California, San Diego, vchellap@ucsd.edu,pcosman@ucsd.edu
Abstract
When losses occur in a transmission of compressed video, the decoder can attempt
to conceal the loss by using spatial or temporal methods to estimate the missing macroblocks. We consider a multi-frame error concealment approach which exploits the
uneven quality in the two reference frames to provide good concealment candidates. A
binary decision tree is used to decide among various error concealment choices. The
uneven quality of the reference frames provides an advantage for error concealment.
1 Introduction
Video transmission over error-prone wireless channels requires some form of error handling mechanism. In standard video coders, errors caused by the communication channel
can propagate across frames due to temporal prediction, which uses the previous reference
frame for coding. There are many different types of error handling mechanisms, including
forward error correction, retransmission, resynchronization codes, and error concealment.
By error concealment (EC), we mean post-processing EC methods, those methods where
the decoder, recognizing that an uncorrectable error has occurred, seeks to hide or minimize the glitch from the viewer so that a more visually pleasing rendition of the decoded
video can be obtained.
In this paper, we propose a dual frame EC algorithm which chooses between a shortterm (ST) reference frame (the previous frame) and a long-term (LT) reference frame (from
the distant past). We use a binary decision tree algorithm called Classification and Regression Trees (CART) to make the concealment choice. This paper is organized as follows.
Background on EC and on CART is provided in Section 2. We describe our methodology
and results in Sections 3 and 4. We conclude in Section 5.
2 Background
In this section we describe previous work in error concealment, and provide background
on CART decision trees and how they apply to the problem of EC.
1
2.1 Prior work on error concealment
In this paper, we are concerned with the set of post-processing methods that can be employed by the decoder. When errors strike the bitstream, we assume the decoder loses a
slice up to the next resynchronization point. In the absence of block interleaving, this slice
corresponds to missing a horizontal swath of macroblocks (MBs). The decoder’s postprocessing methods seek to conceal this loss from the viewer. Many post-processing EC
methods have been proposed (see [1] for a review article). They can be divided into three
main approaches: frequency, spatial, and temporal.
In frequency concealment, DCT coefficients of the missing blocks are estimated using
either the corresponding DCT coefficient of neighboring blocks, or using the neighbor’s DC
values, or other neighborhood features. In spatial concealment, one interpolates directly in
the spatial domain, using, for example, bilinear interpolation (if neighboring blocks on all 4
sides are available) or one-dimensional linear interpolation (if only MBs above and below
are available), or directional interpolation (to preserve edges). In temporal concealment,
blocks from other frames are used for concealment, either by attempting to reconstruct the
motion vector of the lost MB, or by searching for a block that has a good match to the sides
and neighborhood of the missing block (see, for example, [2, 3, 4]). If the estimation of the
motion vector (MV) is inaccurate, the block obtained will have distracting artifacts at the
boundaries with its neighbors. The MV can be estimated using, for example, the average or
median of the MVs from neighboring received MBs. Many video decoders today conceal
errors using the simplest possible temporal concealment approach: using the co-located
MB in the previous frame to conceal a lost MB in the current frame.
Hybrid algorithms combine more than one of the frequency, spatial, and temporal approaches. For example, in temporal concealment, the referenced block can be further improved by spatial smoothing at its edges to make it conform to the neighbors, at the expense
of additional complexity. Often, EC involves using a single fixed method for reconstructing
any MB which is lost. However, a few adaptive EC methods have been proposed. In [5],
the coding mode and block loss patterns are clustered into four groups, and the weighting
between the spatial and temporal smoothness constraints depends on the group. A further
level of adaptivity appears in [6] and [7]. In [8], a CART decision tree is used to decide
upon a particular EC approach among several EC algorithms.
Multiple-reference frame concealment: Multiple-reference frame coding has been included in the new H.264 standard. A small number of papers have studied how multiple
reference frames might be used to improve EC. In [9], two reference frames are examined
for candidate concealment blocks. Either boundary matching conditions are used to select one concealment block, or else candidate concealment blocks from different reference
frames are averaged together to produce the final concealment block (called a multihypothesis block). In [10], candidate concealment blocks from different reference frames are
adaptively weighted to minimize a boundary match criterion, or one candidate concealment
block is held constant while another one varies until a cost converges. In [11], a lost block
is first classified into foreground or background based on neighboring pixels. If it is in the
background, then temporal replacement with the co-located block in the previous frame is
used. If it is in the foreground, then candidate concealment blocks in each of the multiple
reference frames are found and either selected or averaged.
2
2.2 Classification and Regression Trees
algorithm for designing classification and regression trees [12] is applied to
The CART
error concealment as follows. Let be a vector of measurements associated with a missing
MB. For example, includes information on whether the MBs above and below are better
concealed by the ST or LT reference frame. Let be a set of classes, where each class
represents a possible EC method:
. The classifier assigns to every vector a
class from .
!
"
A learning sample or training sequence consists of data , ,
, on # cases where the class is known, that is, # MBs for which the best EC method is
known. To form the training sequence, we can take each MB in the sequence, assume it
is lost, reconstruct it using each of the EC methods, and see which one yields the smallest
distortion. The measurement vector can include both ordinal and categorical variables. The
root node of the tree contains all the # training cases; a mix of best EC methods is present
for the data in this root node. The goal of CART is to successively subdivide the training
set using binary splits in such a way that the data associated with the terminal nodes of
the tree do not have a mix of best EC methods; rather each node should be as “pure” as
possible. We measure the impurity of a set of data using the Gini index of diversity [12].
During the design of the classification tree, we consider, for each terminal node of the
tree, a standard set of possible splits of the data in that node. In the standard set, each
split depends on the value of only a single variable. For each ordered variable %$ , we
include
of the form “Is &$('*) ?” If $ is categorical, taking values
-all
,/. splitting
0. 123questions
.34&5
in +
, then we include all questions of the form: “Is &$7698 ?” as 8
ranges over all subsets of + . There is a finite number of distinct splits since the learning
sample contains only # distinct points. For each single variable, we find the split which
provides the greatest decrease in node impurity. We compare all of these, and find the best
,:;<1=1>5
overall split of the data. A class assignment rule assigns a class 6
to every
terminal node ? . We use the plurality rule which assigns the most popular class for each
terminal node. There are three standard ways of estimating the true misclassification rate
of a classifier: cross-validation, test sample, and the resubstitution estimate. As discussed
below, we used 10-fold cross-validation to determine the size of the final tree, but we used
test samples to estimate the misclassification.
3 Methodology
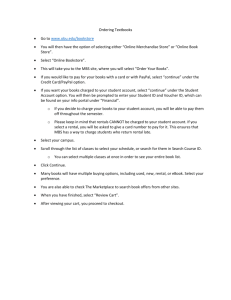
Dual frame motion compensation is depicted in Figure 1, and works as follows. While
encoding frame @ , the encoder and decoder both maintain two reference frames in memory.
The ST reference is frame @BA . The LT reference can be selected in a number of ways;
we used jump updating in which the LT reference frame varies from as recent as frame
@CA
to as old as frame @DAE#FA . When encoding frame @ , if the LT reference frame is
@BAG#HA , then, when the encoder moves on to encoding frame @CI , the ST reference
frame slides forward by one to frame @ , and the LT reference frame jumps forward by #
to frame @CA . The LT reference frame then remains static for # frames, and then jumps
forward again. We refer to # as the updating parameter. This approach was first adopted
3
in [13] and was also used in [14, 15].
In this paper, as in [15], every # th frame is coded with additional bit rate at the expense
of other regular frames. This high-quality frame is then buffered and used as the LT reference frame for the subsequent # frames. The amount of extra quality to be given to the
high quality frames is subject to further research. If there is too large a difference in quality,
the end user will notice an annoying pulsing of the quality even though the overall average
distortion of the sequence may be lower. In our work, the rate allocation was heuristic.
Pulsing of quality was not perceptible.
In dual frame motion compensation, each macroblock can be encoded in one of three
coding modes: intra coding, inter coding using the ST buffer (inter-ST-coding), and inter
coding using the LT buffer (inter-LT-coding). In [14], the choice among these three was
made using an optimal distortion estimation. In the current work, we choose between
inter/intra coding using a similar method to ([16], p. 178). For the two inter coding modes,
we choose the one with lower distortion.
Motion Compensation
n-k
n-1
Long-Term
Frame Buffer
Short-Term
Frame Buffer
n
Current Frame
Figure 1: Dual Frame Buffer Motion Compensation.
We simulated the dual buffer coder by modifying a standard MPEG-4 encoder. The
frame rate for all sequences is 30 frames per second. The bit rates for the sequences are
70-75 kbps.
CART predictor variables: To form the predictor variables for CART, we first examine whether the six neighboring MBs are motion compensated using the ST or LT frame.
For each neighbor, a value of zero is assigned for ST compensation, and a value of one
for LT compensation. The input variable OPTBITS is the sum of these 6 values. If the
neighboring MBs are not lost, it is possible to calculate, for each of them, whether it would
have been better concealed (had it been lost) using an ST MB (motion compensated or
co-located) or using an LT MB. As above, we assign the value zero if the ST MB conceals
better, otherwise the value is one. A CART variable called CONCEALBITS is the sum of
these values. The distortion between each neighbor MB and its previous co-located MB
is computed; the sum of these distortions is another CART input, which we call DIST0.
Similar distortions are computed for the case of ST median MB, LT co-located MB, and
LT median MB. The respective CART input parameters are DIST1, DIST2 and DIST3.
So far, all the input variables depend only on information about the neighbors of the lost
MB, and so the information is available at the decoder (assuming the neighbors themselves
4
arrive intact). One last input variable, OMNIBIT, is different, in that it depends on the lost
MB itself. OMNIBIT=1 if LT prediction was used by the current MB, or it is set to zero
if ST prediction was used. For this particular variable to be used, we must assume that
the information (single bit) corresponding to the reference frame choice is prioritized more
highly than the rest of the data, and is received losslessly even when all other information
about the MB is lost. This is not an unreasonable assumption, since it is less than 0.3% of
the bit rate even at the low rates we used, and would be a much smaller percentage of the
overall rate if higher overall rates were used. We have constructed the CART tree both with
and without using this particular input variable.
Error Concealment modes: Our decoder is equipped with four possible temporal EC
methods: it can conceal using either a co-located or motion compensated MB from either
the ST or LT reference frame. The co-located MBs of the ST and LT frames are the MBs
with MV=0. The median of MVs is computed using the MVs of the three MBs above
and the three MBs below the missing one. The medians of the and components are
computed separately. Of the six neighbors, only those that point to the same reference
frame are used; e.g., if we are computing the ST median MV, then only those neighbors
that have MVs pointing to the ST frame are used. If none of the neighbors points to the
ST frame, then the ST median concealment is taken to be identical to the ST co-located
concealment. The same rules apply to the LT median concealment.
The MBs on the edge of the frame do not have 6 neighbors; these MBs, if lost, are
concealed by using the ST or LT co-located block. Where OMNIBIT is available, the
reference block specified by it is used to conceal a lost MB on the image edge. Where
OMNIBIT is not assumed to be losslessly preserved, the ST co-located MB is used.
4 Results
We carried out simulations for the Carphone, News, Container, Akiyo, Claire, Football,
and Tennis sequences. The first four sequences are QCIF with 300 frames each. Football
and Tennis are 352 240 with 125 and 112 frames, respectively. For each video sequence,
we constructed a binary classification tree using all the other sequences as the training data,
and reserved the sequence of interest as the test data.
For each of the six sequences to be used for training, we formed a training sequence
by considering each slice in the sequence as being lost. We computed the 7-dimensional
input vector (OPTBITS, CONCEALBITS, OMNIBIT, DIST0, DIST1, DIST2, and DIST3)
for each MB in the lost slice. We concealed that MB using each of the 4 concealment
methods, and determined which one produced the lowest mean squared error (MSE). That
method was considered the class associated with that training vector. We used 10-fold
cross-validation within the training set to determine the size of the final decision tree. We
repeated the same procedure in constructing the tree without using the OMNIBIT.
To obtain the results in Table 1, each MB in the test sequence is individually assumed
to be lost, and the concealment MB for it is found using the concealment method named
at the top of the column. The average Mean Squared Error is reported, averaged over the
entire sequence in each case. The first column is the name of the test sequence. The second
column is the average concealment MSE when the ST median approach was used for EC
5
for all MBs. The ST median was chosen because that was the single best EC method
among the 4 approaches. The third column gives the value of the MSE when an omniscient
decoder knows the exact concealment mode to use.
The next two columns give results for the CART decision tree concealment. The column labeled CART show the case where OMNIBIT was used, and the column labeled
CART1 did not use OMNIBIT. So far, we can observe that the two variants of the decision tree both produce higher MSE than the omniscient decoder (as expected) but they also
both produce lower MSE than the ST median concealment. CART constructed using OMNIBIT provides superior performance over ST median, ranging from as low as 1% to as
high as 57%. Without using OMNIBIT, CART still gives a good performance improvement
from no gain to 46% gain. When OMNIBIT is not used, the concealment is fully standard
compliant, and the results are nearly as good as when CART uses OMNIBIT.
For comparison, we also simulated the multihypothesis EC algorithm proposed in [10]
using optimal weight coefficients (which is shown in Table 1 as the opt weights column).
We found that, in our pulsed quality dual reference frame scenario, the algorithm did not
give good results. Upon further investigation, the basis block which is used in the algorithm
is insufficient to judge the concealment candidates from the long-term frame. We found that
there was almost always a bias towards choosing the ST frame candidate using this method.
The column labeled “With OMNIBIT” shows results for when the decision tree is not
used, but rather the concealment choice between ST median and LT median is dictated
directly by OMNIBIT (i.e., if the ST frame was used for motion compensation, then the
ST median is used for concealment). We introduce another parameter OMNIBIT2, whose
value is zero if ST median provides better concealment than LT median, and whose value is
one otherwise. The last column gives the result when the concealment choice between ST
median and LT median is dictated directly by OMNIBIT2, assumed transmitted losslessly.
Using OMNIBIT or OMNIBIT2 directly to dictate the concealment choice in general performs less well than using the CART tree. Sending OMNIBIT2 improves performance
marginally over just using OMNIBIT at the expense of added complexity and rate. Unlike
OMNIBIT, which states which frame was used for motion compensation, and is therefore
part of the compressed stream, OMNIBIT2 states which frame is better for median concealment, and therefore requires the encoder to compute the best concealment method for
each MB, and to transmit an additional bit.
In one final variant (not shown), we also simulated the case when the LT frame is not
a high-quality frame. We found that even here, CART performs better than the ST median
of motion vector EC.
In Table 2, the first 4 columns present the fraction of time the omniscient decoder
chooses each of the 4 concealment modes when operating in a pulsed quality mode. Most
of the time, the omniscient decoder chooses between the ST median and the LT median.
We observe that the LT frames are very useful for concealment: across the sequences, the
omniscient decoder uses the LT median 22–45% of the time. Further, co-located blocks are
used by the omniscient decoder only 7–15% of the time, so they see substantially less use
than the median MV concealment.
In the last 4 columns of numbers, the table presents the fraction of time the omniscient
decoder chooses each of the 4 concealment modes when operating in a regular quality
mode. In the regular quality mode, every Nth frame is still used as an LT reference frame
6
Sequence
ST Omni. CART
Med
News
208
80
121
Container 132
35
59
Claire
46
22
41
Akiyo
70
22
30
Football 1412
842
1178
Tennis
602
338
516
Carphone 211
119
208
CART1
149
71
43
38
1218
549
211
opt.
With
With
weights OMNIBIT OMNIBIT2
232
199
190
51
96
93
62
35
32
67
45
45
1542
1274
1244
738
578
567
240
210
209
Table 1: Mean Squared Error for different concealment approaches
in a dual frame coder, but the Nth frame is not allocated more than its share of bit rate,
so it has the same quality, on the average, as any other frame. We see that the omniscient
concealer chooses the LT frame for concealment substantially less often when the LT frame
is just a regular frame. In earlier work [14, 15], we concluded that pulsing the quality of
frames for use as long term reference frames can have a beneficial effect on lowering the
overall average distortion of the sequence. Table 2 shows that pulsing the quality of long
term reference frames can also provide an advantage for error concealment.
Sequence
News
Container
Claire
Akiyo
Football
Tennis
Carphone
Pulsed Quality Coder
ST med LT med LT CL ST CL
54
39
2.5
4.5
55.7
33.6
3.9
6.7
60
26.58
5.25
8.1
50.4
45.4
1.87
2.22
65
22.5
1.3
11.2
57.4
30.5
3.7
8.4
60.5
25.1
4.48
9.9
Regular Quality Coder
ST med LT med LT CL ST CL
69.6
21.2
2.9
6.3
80.1
8
4
7.9
75.8
12.3
3.1
8.8
56.2
36.7
4.1
3
76.9
11.1
0.8
11.2
69
19.3
2.1
9.6
67.3
14.8
5.4
12.5
Table 2: Percentage of time that each concealment mode (ST median, ST co-located (CL),
LT median, and LT co-located (CL)) provides the best concealment.
In our scenarios so far, the CART tree is not transmitted to the decoder since the learning
data used to construct the tree is independent of the transmitted data. Hence a stand-alone
decoder implementation with a preloaded tree is feasible. Another option is to customize
the CART tree for each video sequence. This can potentially improve performance at the
cost of needing to send the CART tree as side information. To explore this tradeoff, we
used each test sequence as its own training sequence to construct the CART trees. Table 3
shows the video quality results using this approach. The columns labeled “ST Med” and
“CART” are the same as in Table 1. Under “Customized CART tree”, the column labeled
MSE gives the MSE of the customized CART tree, and the column labeled “% imprv.”
shows the percentage improvement that the customized tree gives over the tree created
7
Sequence
ST Med CART
MSE
MSE
News
208
121
Container
132
59
Claire
46
41
Akiyo
70
30
Football
1412
1178
Tennis
602
516
Carphone
211
208
Customized CART tree Omniscient concealment
MSE % imprv. Bits MSE
bits
% bits
104
14
666
80
43659
1.67
54
8
510
35
49599
2.1
26
37
120
22
51885
3.5
30
0
751
22
36884
2.1
1170
-1
1686 842 76888
0.8
509
1
970
338 73260
1.1
176
15
530
119 57113
2.1
Table 3: Customized CART tree MSE shows the MSE for a CART tree constructed from
transmitted sequence. The percentage improvement over the generic CART tree is also
shown, as well as the number of bits required for transmitting the customized CART tree.
Under omniscient concealment, the MSE, number of bits, and percentage of bits are shown
for achieving omniscient concealment.
from a disjoint training set. The improvement from customizing the tree is generally small.
The cost of using a customized CART tree is that the tree must be transmitted in addition to the data. The next column in Table 3 shows the number of bits required for the
customized CART tree for each sequence. The number of bits required for each transmitted
tree is negligibly small and would not impose much overhead on transmission, but the gain
from using a customized tree over a generic tree is also small, so customizing a concealment decision tree does not appear to be useful. We note that, for real-time transmission,
sending a customized tree of this type would in any case not be feasible, since hundreds of
frames are not available in advance.
Rather than sending the CART tree as side information, we could instead send information to the decoder informing it specifically which of the four EC methods to use. This
approach would provide the video quality of the omniscient decoder. However, it would
also require extra overhead. The last two columns of Table 3 show the number and percentage of bits (using Huffman coding) required to inform the decoder of the best EC method.
Across the sequences, this approach would require 1–3.5% of the transmission bandwidth
to transmit this side information.
Finally, we simulate the CART EC algorithm using actual packet loss ratios of 5% and
20%. Recall that, in the experiments above, we averaged across all MBs assuming slices of
each frame are lost in turn. Since each slice is individually lost and concealed, the results
above do not have any case where the concealed block also has its neighbors lost, or where
the neighbor is motion compensated using a block that was concealed.
In simulating with actual packet losses, there can be adjacent lost slices. When concealing a lost MB, the decoder avoids using a replacement block that was itself based on
a lost block. For example, if the ST replacement MB is corrupted, we use the LT median
MB as the candidate. Table 4 shows the results of this experiment. CART provides better
performance than ST median of MV for both loss rates. The difference, though, is smaller
for lower loss rates. For the CART tree with 20% loss, not using the OMNIBIT slightly de-
8
grades performance 0.1–0.2 db. For 5% loss, the CART results with and without OMNIBIT
show negligible difference.
Sequence
News
Container
Akiyo
Claire
Football
Tennis
Carphone
ST Med ST Med CART with CART with CART without
5% loss 20% loss OMNIBIT OMNIBIT
OMNIBIT
20% loss
5% loss
20% loss
29.8
28.7
29.9
29.4
29.2
30.65
29.5
30.6
29.9
29.82
35.45
35
35.52
35.1
35.1
36.1
35
36.07
35.58
35.46
23.7
22
23.86
22.87
22.71
26.02
24.7
26.08
25.1
24.96
28.7
27.7
28.8
27.9
27.9
Table 4: PSNR values for 5% and 20% packet loss ratios. The first two columns show the
performance for ST median MV error concealment, for the two different loss rates. The
next two columns show the performance for CART using OMNIBIT, for the two different
loss rates. The last column is for CART concealment without using OMNIBIT.
5 Conclusions
We have presented a method for concealing lost MBs in a video stream when a dual frame
buffer codec with uneven quality is used to code the stream. The CART-based concealment
method performed better than just concealing using the short-term median MV block. The
CART tree allows the decoder to choose between using the long-term and short-term frame
for concealment, and also to choose between using the co-located and median motion compensated blocks for concealment.
One significant conclusion is that the decision tree approach gives a performance advantage over not using it, even when the tree is not customized for the particular sequence,
but rather is constructed from unrelated sequences. This is in contrast to the work reported
in [8] where a CART decision tree (for a single frame codec) was used to choose among
spatial, temporal, and frequency concealment, and it was found that performance gains
could be had only by a customized tree. Because it required a customized tree, that system
required side information and could not be standard compliant. Unlike that work, our approach requires no side information, and (when used without OMNIBIT) is fully standard
compliant.
A second significant conclusion is that using a pulsed quality coder gives an advantage
for error concealment. If the pulsed quality is too uneven, the effect may be irritating to the
viewer. When used with restraint, it was shown in [14, 15] that the pulsed quality provides
an advantage in reducing the overall distortion of the dual frame coded sequence, while
the pulsing itself is not perceptible. Since the high quality LT frame is attractive also for
the concealer, pulsing the quality provides a concealment advantage to the decoder as well,
which is equipped to take advantage of the high quality reference frames.
9
References
[1] Y. Wang and Q. F. Zhu, “Error control and concealment for video communications: A review,”
Proc. IEEE, 86(5):, May 1998.
[2] M. Ghanbari and V. Seferides, “Cell-loss concealment in ATM video codecs,” IEEE Transactions on Circuits and Systems for Video Technology, vol. 3, June 1993, pp. 238-247.
[3] C. Alexandre and H. V. Thien, “The influence of residual errors on a digital satellite TV encoder,” Signal Process. Image Commun., vol. 11, 1997, pp.105-118.
[4] S. Aign, “Error Concealment for MPEG-2 Video,”, Signal Recovery Techniques for Image and
Video Compression and Transmission, Kluwer Academic Publishers, 1998, pp. 235-268.
[5] Q.-F. Zhu, Y. Wang, and L. Shaw, “Coding and Cell-Loss Recovery in DCT-based Packet
Video,” IEEE Transactions on Circuits and Systems for Video Technology, vol. 3, no. 3, June
1993, pp. 248-258.
[6] W. Luo and M. El Zarki, “Analysis of error concealment schemes for MPEG-2 video transmission over ATM based networks,” Proc. VCIP’ 95, vol. 2501, Taipei, Taiwan, May 1995, pp.
1358-1368.
[7] P. Cuenca, A. Garrido, F. Quiles, L. Orozco-Barbosa, T. Olivares and M. Lozano, “Dynamic
error concealment technique for the transmission of hierarchical encoded MPEG-2 video over
ATM networks,” Proc. 1997 IEEE Pacific Rim Conference on Communications, Computers
and Signal Processing, vol. 2, Aug. 1997, pp. 912-915.
[8] S. Cen and P. Cosman, “Decision Trees for Error Concealment in Video Decoding,” IEEE Trans.
on Multimedia, vol 5, issue 1, Mar. 2003, pp 1-7.
[9] M.E. Al-Mualla, C.N. Canagarajah and D.R. Bull, “Multiple-reference Temporal Error Concealment,” Proc. ISCAS, vol. 5, 2001, pp. 149-152.
[10] Y.O. Park, C.-S. Kim and S.-U. Lee, “Multi-hypothesis Error Concealment Algorithm for
H.26L Video,” International Conference on Image Processing, 2003, pp. 465-468.
[11] B. Jung, B. Jeon, M.-D. Kim, B. Suh, and S.-I. Choi, “Selective temporal error concealment
algorithm for H.264/AVC,” in Proc. IEEE International Conference on Image Processing, Oct.
2004.
[12] L. Breiman, J.H. Friedman, R.A. Olshen and C.J. Stone, “Classification and Regression Trees,”
Wadsworth, Belmont, CA 1984.
[13] T. Fukuhara, K. Asai and T. Murakamai, “Very Low Bit-Rate Video Coding with Block Partitioning and Adaptive Selection of Two Time-Differential Frame Memories,” IEEE Trans. Circuits and Systems for Video Technology, vol. 7, no. 3, pp. 212-220, Feb. 1997.
[14] A. Leontaris and P. Cosman, “Video compression with intra/inter mode switching and a dual
frame buffer,” IEEE Data Compression Conference 2003, pp. 63-72, 2003.
[15] V. Chellappa, P. Cosman and G. Voelker, “Dual Frame Motion Compensation with uneven
quality assignment,” IEEE Data Compression Conference 2004.
[16] K.R. Rao and J.J. Hwang, “Techniques and Standards for Image, Video and Audio Coding,”
Prentice Hall.
10