Radio Frequency Identification Sensors - ASEE
advertisement

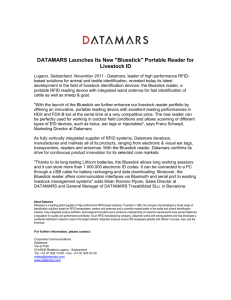
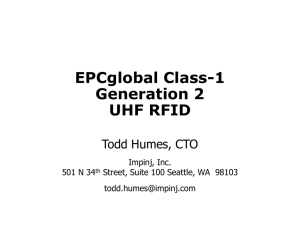
Radio Frequency Identification Sensors Sheshidher Nyalamadugu*, Naveen Soodini*, Madhurima Maddela*, Subramanian Nambi* and Stuart M. Wentworth* Abstract Radio Frequency Identification (RFID) Systems are used when non-line-of-sight operation is required to identify an object and store its information. Some of the applications of this system are toll collection and inventory control. The following paper presents the ongoing research for the Auburn University Detection and Food Safety (AUDFS) project to use RFID technology combined with sensors for detection of pathogens in food. AUDFS aims to integrate the breakthroughs in the detection of food borne illnesses with advances in wireless and biosensor technologies. It explains the basic building blocks and operation of an RFID system. It also illustrates the data transfer process taking place in the system. Introduction Food safety is an important national issue that affects everyone. On an annual basis, 76 million Americans become ill due to food borne pathogens and toxins. The United States Department of Agriculture (USDA) estimates that as many as 5,200 of these individuals will die, with another 325,000 being hospitalized as a result of this exposure. The Auburn University Detection and Food Safety (AUDFS) Center aims to yield fundamental scientific advances in the methods of bacterial and chemical sensing, information technologies and integration of biological and electrical functions on a single chip. These sensors interfaced with an RFID system would help in keeping track of the packages that could contain these harmful bacteria. Radio Frequency Identification (RFID) systems have found favor over other identification and inventory techniques chiefly due to their non-line-of-sight operation and capability to function in adverse environments. The frequency of RFID systems can vary from the lower ranges of the spectrum around 135 kHz to 5.875 GHz. The most commonly used frequency, which has a whole range of applications associated with it, is the 13.56 MHz ISM (Industrial Scientific Medical) band due to its widespread usage and relatively easy design of antenna and electronics. This paper deals with construction of an RFID sensor system for this frequency band. Building Blocks of RFID Systems An RFID system consists of a reader, a transponder or tag, and a host interface connected to the reader. The tag is said to be active if an on-board battery powers it and passive if it derives the necessary power from the reader circuit [1]. Transfer of data is possible when the tag is in the vicinity of the reader. The host interface is normally an application program that is running on a computer system. The program communicates with the reader and makes sense of the data from the tag. If the tags can also be written to, then the application sends out the required data to the reader through an RS232C serial port of the computer. Figure 1 shows the overview of an RFID system. ____________________________ * Department of Electrical & Computer Engineering, 200 Broun Hall, Auburn University, AL 36849-5201 ASEE Southeast Section Conference 2004 Figure 1: Block diagram of an RFID system Reader The basic function of a reader is to transmit an RF signal required to power a passive tag, detect the data from the tag, and send it to the host interface. A crystal controlled oscillator circuit (Figure 2) is used to generate an output signal at 13.56 MHz (the system frequency) shown in Figure 3. This signal is fed to a series RLC circuit, where the inductive element is a loop antenna. When the signal is fed to the reader antenna, it generates an electromagnetic field. The strength of the field depends on various factors like the driving current, the number of turns in the loop, the radius of the loop and the distance of the tag from the center of the loop. This magnetic field induces a voltage across the tag antenna terminals. The tag then rectifies this signal to generate a DC voltage, which it uses to power the electronics and send a signal back to the reader [2]. The returned signal is a sequence of peaks and dips seen in the antenna coil of the reader. This represents amplitude modulation of the carrier due to the tag. Currently, we are using an active transponder and are in the process of developing a rectifier circuit to make the tag passive. Figure 2: Oscillator circuit Figure 3: Captured output waveform from the oscillator ASEE Southeast Section Conference 2004 Data from the tag can be recovered in the reader by demodulation using envelope detection. An amplifier boosts the demodulated signal to RS232 levels so that the information can be transmitted to the host interface and displayed on a computer. Figure 4 shows the detector circuit followed by the amplifier. Figure 4: Detector circuit followed by the amplifier Tag Most transponders simply consist of a silicon chip and an antenna. The antenna captures the electromagnetic energy of the reader and provides an input to the rectifying circuitry in the tag. It supplies power to a microcontroller that controls the entire operation of the tag. It also serves the purpose of transmitting a modulated signal back to the reader. The microchip stores the tag’s identification information and includes clock extraction circuits. The transponder used in this research differs from commercial tags in its ability to take input from sensors in the tag and transmit it along with the identification information. A tag constructed for operation at 13.56 MHz is shown in Figure 5. At this stage in the research the received power is insufficient to power the microcontroller, so power to the transponder is supplied via an onboard battery. The antenna shown in the figure forms the inductive part of an LC resonator circuit. When the LC resonator of the transponder is tuned to the frequency of the reader and is brought near the field of the reader, it draws energy from the magnetic field [3]. A transistor, termed the modulation transistor, is connected to the tapped antenna coil of the tag in such a way that when it turns on, it effectively lowers the inductance of the coil and detunes it. Thus, when the transistor switches in the transponder circuit, the tuned frequency formed by the LC resonator also switches which results in a change in the voltage across the reader antenna terminals. ASEE Southeast Section Conference 2004 Figure 5: Tag circuit Antennas Loop antennas have been used in many applications in miniature low noise RF receiver systems. In order to obtain maximum SNR (Signal-to-noise ratio) of receiving systems and achieve compact geometric structures, square or rectangular loop antennas of medium size (between 0.15 λ and 0.5 λ in maximum dimension) are preferred as they can be easily built into the housings of miniature receivers. In the 13.56 MHz system used, voltage transfer is accomplished through inductive coupling between the reader and transponder coils. As in a typical transformer, where a voltage in the primary coil transfers to the secondary coil, the voltage in the reader antenna coil is transferred to the transponder antenna coil and vice versa [4]. The efficiency of the voltage transfer can be increased significantly with high Q circuits. For 13.56 MHz passive transponder applications, a few micro henries of inductance and a few hundred pico farads of capacitance are used to form these circuits. The reader circuit is a series resonant circuit as indicated in Figure 6. This circuit has minimum impedance at the resonance frequency where it draws maximum current and generates the strongest field. Because of its simple circuit topology and relatively low cost, this type of antenna circuit is suitable for proximity reader antennas. The transponder circuit is a parallel resonant circuit. This circuit has maximum impedance at the resonance frequency where it supports maximum voltage. ASEE Southeast Section Conference 2004 Figure 6: Schematic of series and parallel RLC circuits. Antennas for the reader and the transponder are being modeled using NEC (Numeric Electromagnetic Code) Windows Professional software. A multi-turn rectangular loop antenna for a resonant frequency of 13.56 MHz was designed. NEC has been used to optimize the dimensions of the antennas based on their radiation pattern and VSWR. Figure 7 shows the simulated results of the antenna, including a Smith Chart indicating a low VSWR. (a) Radiation pattern (b) VSWR (c) Smith chart Figure 7: Simulated radiation pattern using NEC Win Pro. ASEE Southeast Section Conference 2004 The transmitter circuit including the antenna coil must be designed to meet the FCC limits [5]. These limits for a system operating at 13.56 MHz are as follows: 1. Tolerance of the carrier frequency: 13.56 MHz+/- 0.01% = +/- 1.356 kHz. 2. Frequency bandwidth: +/- 7 kHz. 3. Power level of fundamental frequency: 10 mV/m at 30 meters from the transmitter. Host Interface The host interface is any computer system like a personal computer or a laptop with an RS232C communication port [6]. It can interface with the reader and run an application program (like Hyper Terminal) that will help in displaying user-friendly data and keeping a database of the transponders in the field. Sensor The sensor will be interfaced to the transponder circuit using the microcontroller. The transponder uses a generic microcontroller with on-chip memory and input/output ports. The microcontroller can be programmed in software to output a certain bit stream depending on input that it receives from external sources like sensors. The program logic can poll the ports and detect changes in the input from the sensor. A biosensor will have sensitive biological film coatings that will undergo changes in material properties on contact with target pathogens like Salmonella and E. Coli. Results An RFID system needs to activate the transponder when it is in the vicinity of the reader and the reader needs to receive data from the transponder. Figure 8 shows the 13.56 MHz RFID system with the reader and the tag in close proximity. As a pilot test, when a clock signal is given to the transponder, an amplitude modulated signal is obtained from the reader as shown in Figure 9. This signal is demodulated using an envelope detector and then amplified. In Figure 10 the detected and amplified signal is compared to the original clock signal. Figure 8: RFID system ASEE Southeast Section Conference 2004 Figure 9: Square wave signal given to tag (bottom) amplitude modulated signal in the reader (top) Figure 10: Square wave signal given to tag (bottom) compared to the signal detected at the reader (top) Next, a microcontroller output that contains the identification information of the transponder is transmitted. Standing in for the sensor is a toggle switch indicating “yes” or “no” This information is demodulated and converted into useful information in the host interface as shown in Figure 11. This figure shows a continuous log of data received in the hyperterminal program running in the host interface, when the tag is in the range of the reader. Figure 11: Screen capture of host interface ASEE Southeast Section Conference 2004 Conclusions The design and realization of an RFID sensor system was presented. The reader was interfaced with a computer running ‘Windows Hyperterminal’ software via an RS232C communications port. Instead of a sensor the transponder was interfaced with a switch that supplies a ‘1’ or ‘0’ input. When the tag was brought near the reader, the reader began receiving a continuous transmission of data from the tag. The data contained a unique identifier for the tag along with the output from the sensor. This information was displayed on the screen of the computer. The transponder is powered via onboard battery, which can be replaced by a rectifier, thus making it compact. A rectifier followed by a voltage multiplier that includes capacitors charged through diodes is being investigated to supply the required DC power for the transponder. The RFID system can be further miniaturized by using surface mount technology. Range of the RFID system can be increased by improving the tuning of the resonant circuits in the system and using efficient antennas. These improvements are currently being considered for the 13.56 MHz RFID system. Increasing the system frequency from 13.56 MHz to 5.8 GHz will reduce the size of the transponder further and enhance the read range of the system. Initial research has recently begun to develop the 5.8 GHz system. Designing small sensors that have good interfacing capabilities would help the integration of the RFID sensor system with consumer products susceptible to pathogen infection. Design of ASICs (Application Specific Integrated Circuits) tailor-made for RFID sensor applications would enable increased volume production of tags, thereby reducing their size and cost. References 1. Sorrells P. (1998), Passive RFID Basics, Microchip Technology Inc. 2. Finkenzeller K. (2000), RFID Handbook, John Wiley, New York. 3. Lee Y. (1999), Antenna Circuit Design, Microchip Technology Inc. 4. Gehrig U. (1999), RFID Made Easy, EM Microelectronic-Marin SA. 5. microIDTM 13.56MHz RFID System Design Guide, (2001), Microchip Technology Inc. 6. Nambi S., Nyalamadugu S., Wentworth S.M., and Chin B.A., (2003), “Radio Frequency Identification Sensors,” Proceedings of the 7th World Multi-conference on Systemics, Cybernetics and Informatics, pp. 386-390. ASEE Southeast Section Conference 2004 Sheshidher Nyalamadugu Sheshidher Nyalamadugu is a member of Institute of Electrical and Electronics Engineers (IEEE). He received his B.E degree in Electronics and Communication Engineering from Osmania University, Hyderabad, India, in 2001. Currently he is pursuing his M.S in Electrical and Computer Engineering from Auburn University, Alabama. His research interests are in developing the rectifying circuits for the RFID system. Naveen Soodini Naveen Soodini is a member of Institute of Electrical and Electronics Engineers (IEEE). He received his B.E degree in Electronics and Communication Engineering from Osmania University, Hyderabad, India, in 2001. He is pursuing his M.S in Electrical and Computer Engineering from Auburn University, Alabama. His research involves development of the oscillator circuits and circuit miniaturization using surface mount technology. Madhurima Maddela Madhurima Maddela is a member of Institute of Electrical and Electronics Engineers (IEEE). She obtained her Bachelor of Engineering (B.E.) in Electronics and Communications from Osmania University, Hyderabad, India, in 2002. She is currently pursuing her M.S. in Electrical and Computer Engineering at Auburn University. Her research focus is on the development of antennas for the 13.56 MHz RFID systems. Subramanian Nambi Subramanian Nambi is a member of Institute of Electrical and Electronics Engineers (IEEE). He obtained his Bachelor of Engineering (B.E.) in Electronics and Telecommunications from the University of Mumbai, Mumbai, India, in 2000 and Master of Science (M.S.) in Electrical and Computer Engineering from Auburn University, in 2003. From June 2000 to April 2001, he was with Comsat Max, Mumbai, a division of Lockheed Martin working with satellite communications and networking. He is currently pursuing a Ph.D. in Electrical and Computer Engineering from Auburn University. His research is on the development of a 5.8 GHz mobile biosensor using RFID systems. Stuart M. Wentworth Stuart M. Wentworth is a Senior Member of the Institute of Electrical and Electronics Engineers (IEEE). He received his B.S. in Chemical Engineering from Auburn University, Alabama, in 1982 and his M.S. (1987) and Ph.D. (1990) degrees in Electrical Engineering from the University of Texas at Austin. He has been a member of the Electrical & Computer Engineering faculty at Auburn University, Alabama since 1990. Dr. Wentworth’s research has focused on the high frequency characterization of materials used for electronics packaging. Dr. Wentworth has received numerous teaching awards at Auburn University, including the Birdsong Merit Teaching Award in 1999. ASEE Southeast Section Conference 2004