Solution
advertisement

ECEN 314: Signals and Systems
Solutions to HW 3
Problem 1.27
(a) y(t) = x(t − 2) + x(2 − t)
Let us check for linearity.
x1 (t) → y1 (t) = x1 (t − 2) + x1 (2 − t)
x2 (t) → y2 (t) = x2 (t − 2) + x2 (2 − t)
ax1 (t) + bx2 (t) = x3 (t) → y3 (t) = x3 (t − 2) + x3 (2 − t)
= ax1 (t − 2) + bx2 (t − 2) + ax1 (2 − t) + bx2 (2 − t)
= a(x1 (t − 2) + x1 (2 − t)) + b(x2 (t − 2) + x2 (2 − t))
= ay1 (t) + by2 (t)
Hence linear.
Let us check for time-invariance.
x1 (t) → y1 (t) = x1 (t − 2) + x1 (2 − t)
x1 (t − to ) = x2 (t) → y2 (t) = x2 (t − 2) + x2 (2 − t)
= x1 (t − to − 2) + x2 (2 − t − to )
6= y1 (t − to )
Note that y1 (t − to ) = x1 (t − to − 2) + x1 (2 − t + to ). Hence time-variant.
Suppose |x(t)| < B. Then y(t) < B + B = 2B (because |x(t − 2)| < B and |x(2 − t)| < B).
Hence stable.
Not memoryless as the present output at time t depends on t − 2.
Non-Causal because y(-1)=x(-3)+x(3). So depends on future inputs.
(b) y(t) = [cos(3t)]x(t)
1
Let us check for linearity.
x1 (t) → y1 (t) = [cos(3t)]x1 (t)
x2 (t) → y2 (t) = [cos(3t)]x2 (t)
ax1 (t) + bx2 (t) = x3 (t) → y3 (t) = [cos(3t)]x3 (t)
¡
¢
= [cos(3t)] ax1 (t) + bx2 (t)
= ay1 (t) + by2 (t)
Hence linear.
Let us check for time-invariance.
x1 (t) → y1 (t) = [cos(3t)]x1 (t)
x1 (t − to ) = x2 (t) → y2 (t) = [cos(3t)]x2 (t)
= [cos(3t)]x1 (t − to )
6= y1 (t − to )
Note that y1 (t − to ) = [cos(3(t − to ))]x1 (t − to ). Hence time-variant.
Stable as |y(t)| < ∞, when |x(t)| < B.
Memoryless as the output at time t depends only on inputs at time t.
Clearly causal.
(c) y(t) =
R2t
x(τ )dτ
−∞
Let us check for linearity.
Z2t
x1 (τ )dτ
x1 (t) → y1 (t) =
−∞
Z2t
x2 (t) → y2 (t) =
x2 (τ )dτ
−∞
Z2t
ax1 (t) + bx2 (t) = x3 (t) → y3 (t) =
x3 (τ )dτ
−∞
2
Z2t
=
¡
¢
ax1 (τ ) + bx2 (τ ) dτ
−∞
Z2t
= a
Z2t
x1 (τ )dτ + b
−∞
x2 (τ )dτ
−∞
= ay1 (t) + by2 (t)
Hence linear.
Let us check for time-invariance.
Z2t
x1 (τ )dτ
x1 (t) → y1 (t) =
−∞
Z2t
x1 (t − to ) = x2 (t) → y2 (t) =
x2 (τ )dτ
−∞
Z2t
=
x1 (τ − to )dτ
−∞
2t−t
Z o
=
x1 (τ )dτ
−∞
6= y1 (t − to )
Note that y1 (t − to ) =
2(t−t
R o)
x1 (τ )dτ . Hence time-variant.
−∞
Suppose x(t) = 1. Then y(1) = ∞. Hence unstable.
Non-causal because, y(1) depends on the value of x(t) at t = 2, as y(1) =
R2
x1 (τ )dτ .
−∞
Clearly has memory by the above argument.
½
(d) y(t) =
0
t<0
.
x(t) + x(t − 2) t ≥ 0
By using the same method as we used for the above parts, it is linear, causal and stable and
3
not memoryless. Now let us check for time-invariance.
½
0
t<0
x1 (t) → y1 (t) =
x1 (t) + x1 (t − 2) t ≥ 0
½
0
t<0
x1 (t − to ) = x2 (t) → y2 (t) =
x2 (t) + x2 (t − 2) t ≥ 0
½
0
t<0
=
x1 (t − to ) + x1 (t − to − 2) t ≥ 0
6= y1 (t − to )
This is because
½
y1 (t − to ) =
0
t < to
x1 (t − to ) + x2 (t − to − 2) t ≥ to
Hence time-variant.
½
(e) y(t) =
0
x(t) < 0
.
x(t) + x(t − 2) x(t) ≥ 0
By using the same technique as was used for the previous problems, this is time-invariant,
not memoryless, stable, causal. Let us check for linearity. Suppose let the input be x1 (t) = 1
for all t. Then the output y1 (t) corresponding to the input x1 (t) is
y1 (t) = 2. ∀ t
Let us now take the input x2 (t) = −x1 (t) = −1. If the system is linear, then we should
get y2 (t) = −y1 (t) = −2, where y2 (t) is the output to the input x2 (t). Since x2 (t) < 0, the
output y2 (t) = 0 6= −y1 (t). Hence not linear.
(f) y(t) = x(t/3) This is linear and stable. It is not memoryless (for example, the output at time t = −3 depends on input at t = −1). It is non-causal as well. Let us see whether
it is time-invariant.
x1 (t) → y1 (t) = x1 (t/3)
x1 (t − to ) = x2 (t) → y2 (t) = x2 (t/3)
µ
¶
t
= x1
− to
3
6= y1 (t − to )
This is because
y1 (t − to ) = x1
4
¡ t − to ¢
.
3
Hence time-variant.
(g) y(t) =
dx(t)
dt
This is linear, as well as time-invariant. This is not memoryless as y(t) depends on x(t − δt)
in calculating dx(t)
, since dx(t)
= limδt→0 x(t)−x(t−δt)
.
dt
dt
δt
Problem 1.28
(a) y[n] = x[−n]
Let us check for linearity.
x1 [n] → y1 [n] = x1 [−n]
x2 [n] → y2 [n] = x2 [−n]
ax1 [n] + bx2 [n] = x3 [n] → y3 [n] = x3 [−n]
= ax1 [−n] + bx2 [−n]
= ay1 [n] + by2 [n]
Hence linear.
Let us check for time-invariance.
x1 [n] → y1 [n] = x1 [−n]
x1 [n − no ] = x2 [n] → y2 [n] = x2 [−n]
= x1 [−n − no ]
6= y1 [n − no ]
Note that y1 [n − no ] = x1 [−n + no ]. Hence time-variant.
This is stable as |y[n]| < ∞, if |x[n]| < B.
Non-causal because, y[−1] depends on the value of x[1].
Clearly has memory by the above argument.
(b) y[n] = x[n − 2] − 2x[n − 8]
By using the same technique as used for the above problem, it is linear, time-invariant,
causal, stable. This is not memoryless.
5
(c) y[n] = nx[n]
x1 [n] → y1 [n] = nx1 [n]
x2 [n] → y2 [n] = nx2 [n]
ax1 [n] + bx2 [n] = x3 [n] → y3 [n] = nx3 [n]
= n(ax1 [n] + bx2 [n])
= ay1 [n] + by2 [n]
Hence linear.
Let us check for time-invariance.
x1 [n] → y1 [n] = nx1 [n]
x1 [n − no ] = x2 [n] → y2 [n] = nx2 [n]
= nx1 [n − no ]
6= y1 [n − no ]
Note that y1 [n − no ] = (n − no )x1 [n − no ]. Hence time-variant.
This is not stable because if x[n] = 1 for all n, then y[n] → ∞ as n → ∞.
Memoryless because, y[n] depends only on x[n]. It is also causal.
(d) y[n] = E{x[n − 1]}, where E is the even part.
E{x[n − 1]} =
x[n − 1] + x[1 − n]
2
This is linear, stable, not memoryless, non-causal. This is time-variant which can be seen
by using exactly the same steps as we used for Problem 1.27 (a) with t replaced by n.
(e) y[n] =
x[n]
n≥1
0
n=0 .
x[n + 1] n ≤ −1
This is linear and stable, not memoryless and non-causal. Let us check for time-invariance.
6
x1 [n] →
x1 [n − no ] = x2 [n] →
=
6=
This is because
x1 [n]
n≥1
0
n=0
y1 [n] =
x1 [n + 1] n ≤ −1
n≥1
x2 [n]
0
n=0
y2 [n] =
x2 [n + 1] n ≤ −1
n≥1
x1 [n − no ]
0
n=0
x1 [n + 1 − no ] n ≤ −1
y1 [n − no ]
y1 [n − no ] =
x1 [n − no ]
n ≥ no + 1
0
n = no
x1 [n + 1 − no ] n ≤ no − 1
Hence time-variant.
x[n] n ≥ 1
0
n=0 .
(f) y[n] =
x[n] n ≤ −1
Following exactly the same steps, it is easy to see from Problem 1.28 (e) that it is linear and
time-variant. It is causal, memoryless and stable.
(g) y[n] = x[4n + 1]
This system is linear as well as stable. Further it is non-causal and memoryless. Let us
check for time-invariance.
x1 [n] → y1 [n] = x1 [4n + 1]
x1 [n − no ] = x2 [n] → y2 [n] = x2 [4n + 1]
= x1 [4n + 1 − no ]
6= y1 [n − no ]
This is because
y1 [n − no ] = x[4(n − no ) + 1] = x1 [4n − 4no + 1].
Hence time-variant.
Problem 1.31
7
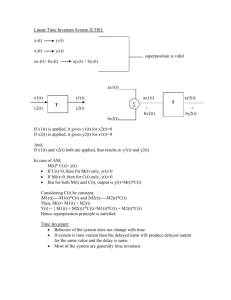
(a) Note that x2 (t) = x1 (t)−x1 (t−2). Therefore using linearity we get y2 (t) = y1 (t)−y1 (t−2).
See the figure below.
(b) We see that x3 (t) = x1 (t + 1) + x1 (t).
y1 (t + 1) + y1 (t). See the figure below.
Therefore using linearity we get y3 (t) =
y(t)
y(t)
2
3
2
0
2
4
−1
t
1
2
t
−2
Problem 1.36
(a) If x[n] is periodic ejωo (n+N )T =e
(2π/To )N T = 2πk
jωo nT
, where ωo = 2π/To . This implies that
⇒
(T /To ) = k/N = rational number
(b) If T /To = p/q, then x[n] = ej2πn(p/q) . Then the fundamental period is q/gcd(p, q)
(from Problem 1.35), and therefore the fundamental frequency is
2π
2π p
ωo T
gcd(p, q) =
gcd(p, q) =
gcd(p, q)
q
p q
p
(c) From part (b) above, p/gcd(p, q) periods of x(t) are needed to form a single period
of x[n].
8