A Biologically Inspired Robotic Ribbon Fin
advertisement

A Biologically Inspired Robotic Ribbon Fin
J. Edward Colgate
Dept. of Mechanical
Engineering
Northwestern University
Evanston, IL 60208 USA
Michael Epstein
Dept. of Mechanical
Engineering
Northwestern University
Evanston, IL 60208 USA
Index Terms—Biomimetic robotics,
swimming, black ghost knifefish.
gymnotiform
Malcolm A. MacIver
Depts. of Mechanical and
Biomedical Engineering
Northwestern University
Evanston, IL 60208 USA
fish
Abstract—The robotic ribbon fin is a propulsive mechanism
inspired by the long fin of the agile, South American black ghost
knifefish. The natural ribbon fin can produce rapid accelerations
in any of multiple directions, enabling the fish to quickly reach
points within the range of its weakly electric sensing system. We
discuss the design and control of the robotic ribbon fin and
introduce a computational model of the thrust which will be
useful for closed-loop control and gait optimization algorithms.
The robotic ribbon fin has potential application in future
underwater vehicles that require a high degree of
maneuverability, rapid accelerations and effective stationkeeping.
I. INTRODUCTION
In this paper, we introduce a new robotic fish fin inspired
by the long, ribbon-like fin of the South American black
ghost, a remarkable fish with integrated electric sensing and
locomotor systems. We then develop a computational model
of the ribbon fin which enables us to estimate the thrust forces
on the fin. This model exploits simplifying assumptions about
the fluid interactions and fin deformations to provide a
straightforward relation between the system dynamics and
resultant forces, without resorting to more complex
computational solutions (see [1-4]). We use the model to
simulate forward swimming of the black ghost and compare
the results with those in the literature, and then simulate a
comparable robot gait.
This effort builds upon the prior work of MacIver, Fontaine
and Burdick [5]; Sfakiotakis and Tsakiris [6]; McIsaac and
Ostrowsky [7, 8] and Ekeberg [9].
II. THE BLACK GHOST KNIFEFISH
The South American black ghost knifefish (Apteronotus
albifrons) can be found in rapidly flowing, sandy-bottomed
rivers and creeks from Venezuela to Paraguay. Adults grow to
lengths of about 15 – 50 cm and they are nocturnal hunters of
tiny insect larvae and crustaceans [5, 10].
Figure 1: The black ghost knifefish (from Dr. Axelrod's Atlas of Freshwater
Aquarium Fishes)
The black ghost generates a weak electric field, about
1 mV/cm, to sense its environment and locate prey. The fish
will typically swim past its target while processing the
sensory information, then rapidly reverse course and capture
the prey. The black ghost’s ability to accelerate in any of a
number of directions enables effective coverage of all points
within its sensing range [5, 11].
The ribbon fin is the black ghost’s primary propulsive
element and runs about two thirds of the length of its
underbelly. The fin is supported and actuated by bony rays
spaced approximately 1 mm apart and 1 cm in length, though
as the fin tapers at either end, the rays become progressively
shorter. The fish has two smaller pectoral fins, located on
either side of the body towards the front, which it uses for
steering and stability.
The black ghost swims forward by oscillating the fin rays
slightly out of phase with each other, thereby producing a
traveling wave along the fin, from front to back, while
keeping its thin, flat body mostly rigid; it can move backward
with similar agility by reversing the wave’s phase velocity
[12, 13]. The fish can execute rapid, sharp turns by rolling its
body about the head-to-tail axis and then actuating the ribbon
fin to produce thrust normal to the axis [5, 11]. This is
unusual behavior for fish, whose deep body plans are
interpreted as providing stability to counter roll [14], but it is
an effective mechanical solution for movement in unactuated
directions.
1
III. ROBOTIC APPARATUS
IV. COMPUTATIONAL MODEL
A. Modular Design
The robotic ribbon fin was designed with commercial
three-dimensional CAD software (SolidWorks, SolidWorks
Corporation, Concord, Mass., USA). All structural parts were
precision cut from lightweight aluminum 6061 alloy sheets on
a high-speed, CNC milling machine.
A. Fluid Interaction
We employ a fluid drag model which has been used
extensively in the literature [6, 7, 9, 12] (see also [15-17]) to
analyze forces on swimming robots. The model assumes a
large Reynolds number flow regime and that all forces acting
on a propulsive element are due to the motion of that element
in the fluid, i.e. the effects of the fluid’s motion are not
considered. The results of initial testing of the robotic ribbon
fin and data reported for the black ghost indicate a Reynolds
number of 103–104 [5, 18].
The movement of the robot’s propulsive elements through
the fluid causes pressure differentials to develop on either side
of the elements, resulting in drag forces which act in
opposition to the motion. The drag force on a single
propulsive element moving through the fluid is given by:
Fn = − 12 ρCS v n
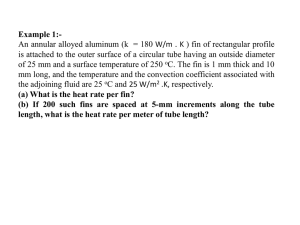
Figure 2: Robotic ribbon fin (left, shown upside down for clarity) and closeup view of a single actuator module (right). Motors are shown in blue.
The modular design of the robotic fin enables us to
experiment with different materials for the rays and flexible
membrane; in the preliminary trials, we used 1.6 mm diameter
brass rods and thin latex sheet approximately 0.1 mm thick.
The current version of the fin is assembled from sixteen
identical actuator modules, each of which has a digital RC
servo motor (Model DS168, Japan Radio Corp.), a 1:1 ratio
miter gear pair, ray and holder, as shown in Figure 2. The
motors operate at voltages ranging from 4.8–6.0 volts DC,
with a higher voltage associated with greater speed and
torque. At 4.8 volts, each motor delivers 0.33 Nm of torque
and rotates at a maximum speed equivalent to 1.2 revolutions
per second.
B. Motor Control
The motors are controlled by a pulse width modulated
(PWM) signal of fixed amplitude and a frequency of 50 Hz.
The motor position is commanded by varying the duration of
the pulse from a minimum of 1.0 ms, to a maximum of 2.0 ms
and the particular motors we use have a total range of 80°.
The PWM control signals are generated by a
microcontroller board (ServoCenter, Yost Engineering, Inc.,
Portsmouth, Ohio, USA) which is capable of addressing
sixteen motors independently. The board is connected by
RS232 serial interface to a Windows PC, and custom
MATLAB software is used to send binary command data to
the microcontroller.
2
uv
(1)
where Fn is the force exerted by the fluid on the n-th
propulsive element; ρ is the density of the fluid; C is a shapedependent drag coefficient; S is the effective area of the
propulsive element that confronts the fluid; vn is the velocity
of the n-th propulsive element and uv is a unit vector in the
direction of the velocity.
We can resolve this force into components which act
parallel and perpendicular to the surface of each propulsive
element. For a smooth, thin and flat body, the parallel drag
coefficient, and hence the parallel force, is negligible [6, 7].
Therefore, we can assume that the force acting normal to the
surface of the propulsive element is nearly equal to the entire
force on the element:
Fn ≅ Fn⊥ = − 12 ρCS [v n • u ⊥ ] 2 u ⊥
(2)
where Fn⊥ is the component of the drag force acting
perpendicular to the surface of the n-th propulsive element; vn
is the n-th element’s velocity relative to the fluid and u⊥ is a
unit vector normal to the surface of the element (and within
90° of the velocity vector).
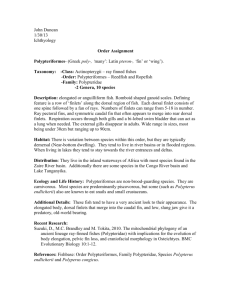
B. Idealized Mechanism
Figure 3 shows an idealized mechanism derived from the
robotic ribbon fin. Each of the sixteen rays may be regarded
as a rigid rod of negligible diameter and mass, attached by a
revolute joint at its base to the common axis. The rotation of
each ray is constrained to less than ±40º from the vertical, in
accordance with the observed kinematics of the natural ribbon
fin during forward swimming [5].
2
the ribbon fin can produce thrust, lift and lateral stabilizing
forces simultaneously.
Figure 3: Idealized robotic ribbon fin with the rays as rigid rods and the
flexible fin as rigid, triangular flat plates.
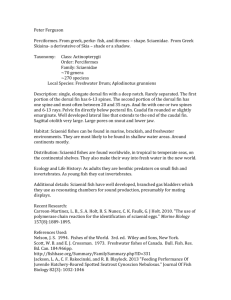
We model the flexible membrane as a series of connected,
rigid, triangular plates of negligible thickness and mass—
hereafter simply “triangles”—whose motion approximates the
twisting and stretching of the membrane. Figure 4 shows that
the shape of the membrane segment between the first two rays
is approximated by triangles ABC and BCD. Since the two
rays rotate about points B and D respectively, triangle BCD
moves in pure rotation around the body axis. Its motion
contributes to the lateral (x) and vertical (y), but not axial (z),
resultant forces acting on the body. Triangle ABC, however,
may rotate about the main axis and about the axis along AB,
depending on the relative linear velocity of the ray tips. The
length of segment AC varies if the ray tips move with a
nonzero relative linear velocity, so both the orientation of
triangle ABC and its area may change with time. Therefore,
the motion of triangle ABC may result in a force with
components in the lateral, vertical and axial directions, and a
magnitude varying with the area of the triangle and the square
of its velocity.
C. Gait Generation
A forward swimming gait can be generated by passing a
traveling wave along the ribbon fin from front to rear. We can
produce such a wave by commanding all rays to oscillate at
the same frequency but with a constant phase lag [6, 19, 20].
The angular position of the n-th ray is then given by (3). The
frequency, amplitude and wavelength may serve as inputs to a
closed-loop control system [6] or a gait optimization
algorithm designed to maximize swimming performance.
(n − 1) L
θ (n,t ) = Θ(n ) sin 2πft − 2π
N λ
where θ(n,t) is the angular position of the n-th ray at time t;
Θ(n) is a function defining the maximum angular deflection in
radians of the n-th ray and therefore the amplitude of the wave
at the n-th ray; f is the angular frequency of the wave; N is the
total number of rays; λ is the wavelength and L is the fin
length.
The phase velocity of the traveling wave generated by (3)
is:
v= λ f
(4)
where v is the wave’s phase velocity.
D. Determining Thrust
To account for the distribution of local forces across the
flexible membrane, we create a mesh of cells on the surface of
the approximating triangles (see Figure 5). The force on a cell
of infinitesimal area is given by the equation below and we
use the experimentally determined drag coefficient for a flat
plate moving normal to the fluid, that is C = 1.28 [21]:
dFi = − 12 ρC dS [v i • u i ⊥ ] 2 u i ⊥
Figure 4: Close-up view of the idealized robotic ribbon fin. (See text for
explanation of annotations.)
In general, for a fin with N rays, the membrane can be
approximated by (2N-2) triangles. Half of these are similar to
ABC in that they may have a varying area and their motion
may contribute to the resultant axial, vertical and lateral
forces acting on the fin. The remaining triangles are similar to
BCD; they move only in pure rotation and contribute to the
resultant forces on the fin in the vertical and lateral, but not
axial, directions. Therefore, by proper actuation of the rays,
(3)
(5)
where dFi is the force on the i-th cell, dS is the area of the
cell, vi is the velocity of the centroid of the quadrilateral cell
region, and ui⊥ is the unit vector normal to the surface of the
cell (and within 90° of the velocity vector).
The instantaneous resultant force acting on the robot is
found by integrating the differential forces over the entire
membrane surface. The time-averaged axial thrust on the
robot during one period of fin undulation is given by:
Fz
=
1T
[ F(t ) • u z ] dt
T ∫0
(6)
where ‹Fz› is the magnitude of the time-averaged thrust over
one period of fin undulation, T is the period, F(t) is the
instantaneous resultant force acting on the fin and uz is a unit
vector in the axial direction.
3
E. Validating the Model
To confirm the validity of the model, we simulate forward
swimming of the black ghost and compare the thrust
determined by the model to that reported in the literature. We
consider a 15 cm long fish, having a 10 cm ribbon fin of 100
rays and use (3) to generate a forward swimming gait. The
control inputs, fin characteristics and resultant thrust are
summarized in the table below:
F. Applying the Model to the Robotic Fin
Next we apply the model to simulate the forward
swimming of the robotic ribbon fin. The results are shown in
the table below:
TABLE II
FORWARD SWIMMING OF THE ROBOTIC RIBBON FIN
Fin Characteristics
TABLE I
FORWARD SWIMMING OF THE BLACK GHOST KNIFEFISH
Fin Characteristics
Number of rays, N
100
Ray length
10 mm
Ray spacing
1 mm
Fin length, L
100 mm
3.0 Hz
Wavelength, λ/L
1.0
Amplitude, Θ(n)
π/6 for all n = {1, 2, …, N}
Thrust
2.0 x 10-4 N
Figure 5 shows the model-generated pressure distribution
across the black ghost’s ribbon fin just after the start of the
simulation. The time averaged thrust calculated by the model
is 2.0 x 10-4 N and the time averaged lateral force is zero, both
of which agree well with prior results reported in the literature
for knifefish [18].
The model also indicates a relatively insignificant
(approximately 4% of the thrust) downward-directed vertical
force on the fish during forward swimming. It remains to be
determined whether such a small force in fact exists, or if it is
an artifact of our discrete model.
16
Ray length
50.8 mm
Ray spacing
11.4 mm
Fin length, L
171 mm
Control Inputs
Control Inputs
Frequency, f
Number of rays, N
Frequency, f
3.0 Hz
Wavelength, λ/L
1.0
Amplitude, Θ(n)
π/6 for all n = {1, 2, …, N}
Thrust
7.9 x 10-2 N
V. DISCUSSION
In this paper, we introduced a new robotic ribbon fin and a
computational model which enables us to estimate the
resultant thrust on the robot. We applied this model to
forward swimming of both the black ghost knifefish and the
robotic fin; results obtained for the knifefish agree well with
those reported in the literature.
We are currently constructing a test bed that will enable
experimental measurement of the propulsive forces generated
by the robotic ribbon fin. Such data will allow us to evaluate
the computational model and the simplifying assumptions
made about the hydrodynamics and fin deformations. Our
future research will be directed toward a better understanding
of the fin and fluid dynamics (for both the robot and the
natural fish) and of the relative impact of the design and
control parameters on the production of thrust.
ON-LINE RESOURCES
Photographs and video of the robotic ribbon fin and a copy
of this document are available at the following URL:
http://www.neuromech.northwestern.edu/publications
ACKNOWLEDGMENT
The authors wish to thank Professors S. Lichter and N.
Patankar of Northwestern University for their suggestions and
insights.
REFERENCES
[1]
[2]
Figure 5: Cell mesh and magnitude of pressure distribution across the black
ghost’s ribbon fin just after the start of the forward swimming simulation.
W. K. Liu, Y. Liu, A. Gerstenberger, D. Farrell, L. Zhang, and X.
Wang, "Immersed Finite Element Method and Applications to
Biological Systems," International Center for Numerical Methods and
Engineering (CIMNE), 2004, pp. 233-248.
R. Cortez, "A vortex/impulse method for immersed boundary motion in
high Reynolds number flows," Journal of Computational Physics, vol.
160, pp. 385-400, 2000.
4
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
R. Mittal, "Computational modeling in biohydrodynamics: Trends,
challenges, and recent advances," IEEE Journal of Oceanic
Engineering, vol. 29, pp. 595-604, 2004.
J. Carling, T. L. Williams, and G. Bowtell, "Self-propelled anguilliform
swimming: Simultaneous solution of the two-dimensional NavierStokes equations and Newton's laws of motion," Journal of
Experimental Biology, vol. 201, pp. 3143-3166, 1998.
M. A. MacIver, E. Fontaine, and J. W. Burdick, "Designing future
underwater vehicles: Principles and mechanisms of the weakly electric
fish," IEEE Journal of Oceanic Engineering, vol. 29, pp. 651-659,
2004.
M. Sfakiotakis and D. P. Tsakiris, "SIMUUN: A Simulation
Environment for Undulatory Locomotion," FORTH-ICS TR-343, 2004.
K. A. McIsaac and J. P. Ostrowski, "A geometric approach to
anguilliform locomotion: modeling of an underwater eel robot,"
presented at IEEE Conference on Robotics and Automation (ICRA),
Detriot, MI, 1999.
K. A. McIsaac and J. P. Ostrowski, "Motion planning for anguilliform
locomotion," IEEE Transactions on Robotics and Automation, vol. 19,
pp. 637-652, 2003.
O. Ekeberg, "A Combined Neuronal and Mechanical Model of Fish
Swimming," Biological Cybernetics, vol. 69, pp. 363-374, 1993.
H. Ortega and R. P. Vari, "Annotated checklist of the freshwater fishes
of Peru," Smithsonian Contributions to Zoology, vol. 437, pp. 1-25,
1986.
M. A. MacIver, N. M. Sharabash, and M. E. Nelson, "Prey-capture
behavior in gymnotid electric fish: motion analysis and effects of water
conductivity," J Exp Biol, vol. 204, pp. 543-57, 2001.
M. Sfakiotakis, D. M. Lane, and J. B. C. Davies, "Review of fish
swimming modes for aquatic locomotion," IEEE Journal of Oceanic
Engineering, vol. 24, pp. 237-252, 1999.
J. E. Colgate and K. M. Lynch, "Mechanics and Control of Swimming:
A Review," IEEE Journal of Oceanic Engineering, vol. 29, pp. 660673, 2004.
D. Weihs, "Stability versus maneuverability in aquatic locomotion,"
Integrative and Comparative Biology, vol. 42, pp. 127-134, 2002.
X. Tu and D. Terzopoulos, "Artificial Fishes: Physics, Locomotion,
Perception, Behavior," presented at ACM SIGGRAPH '94, Orlando,
Florida, 1994.
W. W. Schultz and P. W. Webb, "Power requirements of swimming: Do
new methods resolve old questions?" Integrative and Comparative
Biology, vol. 42, pp. 1018-1025, 2002.
N. Kato, "Pectoral Fin Controllers," in Neurotechnology for Biomimetic
Robots, J. Ayers, J. L. Davis, and A. Rudolph, Eds. Cambridge, MA:
The MIT Press, 2002, pp. 325-347.
R. W. Blake, "Swimming in the Electric Eels and Knifefishes,"
Canadian Journal of Zoology-Revue Canadienne De Zoologie, vol. 61,
pp. 1432-1441, 1983.
D. S. Barrett, M. S. Triantafyllou, D. K. P. Yue, M. A. Grosenbaugh,
and M. J. Wolfgang, "Drag reduction in fish-like locomotion," Journal
of Fluid Mechanics, vol. 392, pp. 183-212, 1999.
M. J. Lighthill, "Large-amplitude elongated body theory of fish
locomotion," presented at Royal Society of London (B), London, 1971.
T. Benson, "Shape Effects on Drag," 2004;
http://wright.nasa.gov/airplane/shaped.html
5