Controlling a Biomimetic Lobster Robot with an Electronic Nervous
advertisement

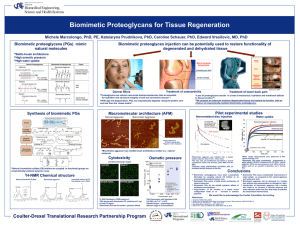
Graduate Category: Security/Sustainability Degree Level: PhD Abstract ID# 960 Controlling a Biomimetic Lobster Robot with an Electronic Nervous System 1 2 Qingchao Kong , Daniel Blustein , Prof. Joseph Ayers 1,2 Bioengineering1 , Biology 2 , Biomimetic Underwater Robot Program, Nahant, Northeastern University Abstract Biorobotics seeks to endow engineered devices with the capabilities of animal models. To also validate neuronal network hypotheses, a biomimetic underwater robot, RoboLobster, is based upon the body structure and biomechanics and controlled by an Electronic Nervous System (ENS) simulation instantiating the innate network architecture of the American Lobster, Homarus americanus. It is a closed-loop biorobotic simulation of neuron network operation and allows validation of neuronal models of the taxes and kineses in unpredictable real-world environments (i.e., littoral marine environments). RoboLobster realizes three aspects of a complete biomimetic platform: adaptive biomechanics, exteroceptive reflexes, and a library of innate behavioral acts. Background Fast Dynamical Spiking Behavior Slow Dynamical Spiking-Bursting Behavior Coordinating Neuron Discrete Time Map-based Neuron Model • • • • Lobster Walking Central Pattern Generator Exteroceptive Reflexes Network System Overview Antennae Bending Sensor; Optical Flow Sensor; Compass; Claw Bumper. Leg 3 DOF Antagonistic Actuation Configuration RoboLobster Electronics Hardware Overview Experimental Results Bump Response Optical Flow Response Integration of Antennae and Visual Input Conclusion Compass Error Response Integration of Optical Flow and Claw Bumps Integration of Antennae and Claw Bumps • We demonstrate a new type of robot controlled by a nervous system simulation adapted for underwater walking. • RoboLobster represents one of the first demonstrations of bio-inspired optical flow control on an underwater walking robot. • There are many opportunities to conduct further experiments with the development of such a powerful biomimetic robot. Integration of Compass and Claw Bumps • • • • • Reference Ayers J. (2002) A conservative biomimetic control architecture for autonomous underwater robots. In: Ayers J., Davis J.L., Rudolph A, editors. Neurotechnology for Biomimetic Robots. MIT Press. Pp. 242-259. Ayers, J. (2004). Underwater walking. Arthropod Structure & Development. 33:347–360. Ayers J., Brady D.P., Kim Y., Tadmor G. (2005) Adaptive behavior of a biomimetic underwater robot based on nonlinear dynamics of an electronic nervous system. Under review by the NSF Collaboratorative Research in Computational Neuroscience Program. Ayers, J., Blustein, D., & Westphal, A. (2012). A Conserved Biomimetic Control Architecture for Walking, Swimming and Flying Robots. Lecture Notes on Artificial Intelligence. 7375: 1-12. Rulkov N.F. (2002) Modeling of spiking-bursting neural behavior using two-dimensional map. Physical Review E, 65:041922