S1 - 1 STATIC EQUILIBRIUM: FORCES AND TORQUES
advertisement

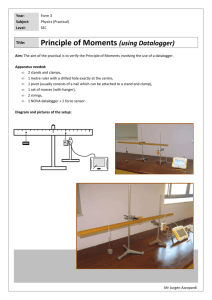
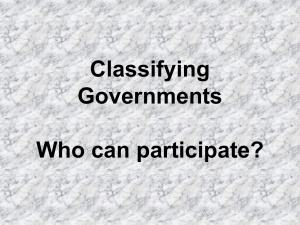
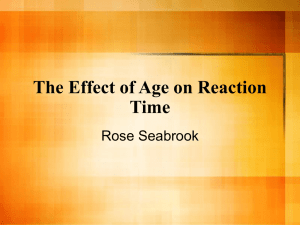
S1 - 1 STATIC EQUILIBRIUM: FORCES AND TORQUES OBJECTIVE: The objective of this experiment is to study the role of forces and moments of forces for an object in equilibrium. Moment of a force is also known as torque. INTRODUCTION: For an object to be in static equilibrium (zero acceleration and zero velocity) two conditions have to be satisfied: 1. The sum of all external forces must be zero: 𝐹!"# = 𝐹! = 0 → 𝐹!" = 0 ; 𝐹!" = 0; 𝐹!" = 0; 2. The sum of all moments of the applied forces (calculated with respect to an arbitrary common point) must be zero: 𝜏!"# = 𝜏! = 0 → (− 𝜏!"# + 𝜏!""!" ) = 0; Torque is a quantity that measures the tendency of an applied force to cause rotation. Torque or moment of a force depends not only on the amount of force applied but also on the position of the point of application of the force relative to the point or axis with respect to which the body has a tendency to rotate about. By convention, the torque of a force that tends to cause a clockwise (CW) rotation (on a plane) is negative while the torque that tends to cause a counterclockwise (CCW) rotation is positive. For every force, including the gravitational force (weight), one can define a moment or torque with respect to a point or an axis. A simple definition of moment of a force F with respect to a point is given by the formula 𝜏 = 𝐹𝑑 where F is the magnitude of the force and d is the distance (measured on the perpendicular direction) from the line of action of the force the point about which the moment is being calculated. Note that inanimate objects, such as tabletops and axles, can exert forces on objects resting on them. Recognizing all forces applied to a given object is extremely important. Equally important is to know where, on the object, these forces are applied. For example, one of the forces that acts on a body is the force of gravity or weight 𝐹! = 𝑚𝑔. Its torque is denoted by τg. xcm? Fpivot Fsensor Fg Figure 1: Free body diagram of ruler supported by a pivot on one end, and sensor on the other. The point of application of the force of gravity on a body is called the centre of gravity. It is important to know the position of the centre of gravity, which we denote here by xcm. Part I of this lab deals precisely with the determination of the centre of gravity. For that one has to realize that the rod in Figure 1 is subjected to three forces: the upward force Fsensor due to the force sensor, the downward force of gravity Fg, and the upward force of the supporting pivot, Fpivot. In all three cases studied here you have to achieve equilibrium of the rod so that the equations of equilibrium can be applied to find the unknowns. Read the procedure in each part of this experiment and make sure you understand the structure of the three particular tables required to record the data. S1 - 2 PART I: DETERMINATION OF THE CENTRE OF GRAVITY MATERIAL: Support frame, rod (ruler), pivot, ruler mounts, Vernier LabPro, Dual Range Force Sensor, and a computer. Force Sensor d F Pivot Figure 2: Schematic for Part I, Determination of the centre of gravity PROCEDURE: 1. Measure the mass, m, of the ruler. 2. Connect the Dual-Range Force Sensor to Channel 1 of the LabPro interface. Set the range switch on the Force Sensor to 10 N. The Force Sensor should be mounted vertically on the support frame using a rod clamp. 3. Open Logger Pro on your computer and follow these steps to calibrate the Force Sensor: a. Choose Calibrate } CH1: Dual Range Force Sensor from the Experiment menu. Click . b. With no mass hanging from the sensor, enter 0 in the Reading 1 field. Click . c. Hang the 300 g mass from the sensor. This applies a force of 2.94 N. Enter 2.94 in the Reading 2 field, and after the reading shown for CH1 is stable, click . d. Click to close the calibration dialog. 4. Hang the ruler mount from the Force Sensor. Click , select Force Sensor from the list, and click to zero the Force Sensor. 5. Support the rod horizontally as in Figure 2, with the left end of the ruler in a ruler mount, resting on the pivot. Insert the right end of the ruler into the mount hanging from the Force Sensor. Ensure the ruler is level. 6. In Logger Pro, select Data Collection from the Experiment menu. Set the Duration to 2 seconds, and the Sampling Rate to 100 samples/second. 7. Use Logger Pro to measure the force over 2 seconds by clicking to take data, and average the result to determine F by selecting Statistics from the Analyze menu. Measure the distance d. 8. Repeat steps 2-3 for two other values of d, filling in Table 1. 9. Determine from the data the location of the centre of gravity of the ruler, 𝑥!" . Average the three measurements for the value of 𝑥!" you will use in your Part II calculations. Table 1: Data table for Part I, Determination of the centre of gravity d (m) F (N) τg (N.m) xcm (m) S1 - 3 PART II: EQUILIBRIUM WITH PARALLEL FORCES MATERIAL: Support frame, rod (ruler), pivot, ruler mounts, hanging masses, Vernier LabPro, one Dual Range Force Sensor, and a computer. Force Sensor d F l Pivot Mg Figure 3: Schematic for Part II: Equilibrium with parallel forces. PROCEDURE: 1. Support the rod horizontally, as in Figure 3, with the left end in a ruler mount, resting on the pivot. A second ruler mount will be used to hang the ruler from the force sensor. 2. Place a mass M = 300 g a distance l along the ruler from the pivot, hanging from a ruler mount. Be sure to include the mass of the ruler mount in your total M. 3. Use Logger Pro to measure the force by clicking to take data, and average the 2 seconds of data to determine F. Measure the distance d that yields static equilibrium. 4. Repeat step 2-3 for two other values of M and l, filling in Table 2. Use this data to fill Table 3. 5. What is the force on the rod at the pivot? 6. Discuss your results. Table 2: Raw data table for Part II, Equilibrium with parallel forces l (m) d (m) F (N) M (kg) Table 3: Calculated quantities for Part II: Equilibrium with parallel forces Fd (Nm) τg=mgxcm (Nm) Mgl (Nm) 𝜏! (Nm) S1 - 4 PART III: EQUILIBRIUM WITH PARALLEL FORCES MATERIAL: Support frame, ruler, ruler mounts, hanging masses, Vernier LabPro, two Dual Range Force Sensors, and a computer. P d F l Mg Figure 4: Schematic for Part III, Equilibrium with parallel forces PROCEDURE: 1. Start with the same mass M and distance l as your last measurement in Part II. Be sure to include the mass of the ruler mount in your total M. 2. Connect the second Dual-Range Force Sensor to Channel 2 of the LabPro interface. Set the range switch on the Force Sensor to 10 N. 3. Calibrate the second Dual Range Force Sensor, P, as you did in Part I, Step 4. 4. Hang the third ruler mount from the Force Sensor. Click , select the new Force Sensor (CH2) from the list, and click to zero the Force Sensor. 5. Support the left end of the ruler with the Dual Range Force Sensor P. 6. Record the forces F and P by clicking to take data and averaging 2 seconds of data. Record Mg. 7. Repeat Step 5 for the other values of M and l you used in Part II, filling in Table 4. Table 4: Data table for Part III, Equilibrium with parallel forces F (N) P (N) Mg (N) Fg=mg (N) ! F ∑ i (N) 6. Is the sum in the last columns of Table 2 and Table 3 zero as expected? 7. Discuss your results. 8. For the same values of M and F, how does the value of P compare with the value found in step 5 of part II? S1 - 5 The following instructions will help you prepare to write the report: II. PROCEDURE 1. Draw a diagram to describe the apparatus used to determine the centre of gravity of a bar. 2. Fill up the tables as required, including the uncertainty of every measurement. III. CONCLUSIONS 1. Is the centre of gravity where you expect it to be? Explain or justify the discrepancies. 2. Based on the theory of static equilibrium, which values do you expect to obtain for the last columns of Table 3 and Table 4? Which values do you get for those cells? Explain the discrepancies.