Class 6 Slides - Department of Mechanical Engineering
advertisement

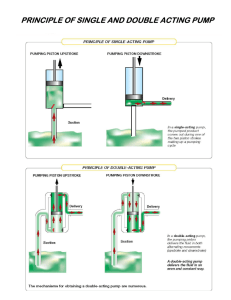
ME 4232: FLUID POWER CONTROLS LAB Class #6 Hydraulic Pumps Notes • Next Friday: – Van de Ven Traveling – Servo Hydraulic Overview & System Dynamics Review • Upcoming Labs: – Lab 11/12: Synchronous / Asynchronous & Tandem / Parallel Connections – Lab 13: Power Steering – Lab 14: Integrated Lab (Part I) 2 Agenda • Feedback: Lab Sections • Power Steering Valve • Pump Classification – Positive Displacement Types • Pump Theory – Flow Ripple – Inefficiencies – Aeration/Cavitation • Hydrostatic Transmissions – Types / Characteristics – Hybrid Vehicle Architectures 3 Feedback: Lab Sections • Overall Going Well – Helpful / Knowledgeable TAs (right amount of guidance) • Issues: – Some labs tight on time – Sometimes confusion – Lab assignments vague 4 Power Steering Valve (Lab 13) Open center steering Power beyond steering 5 Pumps - Introduction 6 Non-Positive Displacement Pump 7 Types of Positive Displacement Pumps • Gear pump (fixed displacement) – internal gear (gerotor) – external gear • Vane pump – fixed or variable displacement – pressure compensated • Piston pump – axial design – radial design – bent-axis design 8 External Gear Pump • Driving gear and driven gear • Fluid trapped between gear teeth and housing 9 Gerotor pump Inlet port • • • • Outlet port Internal/External Gear Pair Inexpensive Low-Pressure Applications Low Flow (0.1 – 11.5 in3) 10 Vane Pump • Vanes in slots in rotor • Vanes loaded against cam ring • Eccentricity determines displacement • Quiet • Limited Pressure 11 Pressure Compensated Vane Pump 12 curve • Spring determines P-Q Axial Piston Pump • Pistons rotate with cylinder block • Pistons translate against swash plate • Displacement determined by swash plate angle • Fluid enters/exits through valve plate 13 Radial Piston Pump • Cam moves pistons radially • Displacement determined by cam profile • Displacement variation can be achieved by moving the cam (not common) • High pressure capable, and efficient • Pancake profile 14 Bent Axis Pump • • • • Drive shaft coupled to cylinder block Stationary valve plate Low piston side load High efficiency 15 Pumping Theory - Flow Ripple 16 Pumping Theory – Power Variable Calculations 17 Pumping Theory – Efficiency 18 19 Aeration and Cavitation • Disastrous Events • Aeration – air bubbles enter pump at low pressure side • Cavitation – Dissolved air cavitation – Vapor cavitation • Bubbles expand in low pressure • Bubbles collapse in high pressure – Micro-jets formed Rapid Erosion 20 Cavitation Video 21 http://www.youtube.com/watch?v=eMDAw0TXvUo Hydraulic Motor / Actuator • Hydraulic motors / actuators are basically pumps run in reverse • Input = hydraulic power • Output = mechanical power 22 Hydrostatic Transmission 23 Closed Circuit Hydrostatic Trans 24 General Consideration - Hydrostats • Advantages: – – – – – – Wide range of operating speeds/torque Infinite gear ratios - continuous variable transmission (CVT) High power, low inertia (relative to mechanical transmission) Dynamic braking via relief valve Engine does not stall No interruption to power when shifting gear • Disadvantage: – Lower energy efficiency (80% versus 92%+ for mechanical transmission) – Leaks ! 25 Hydraulic Hybrid Vehicle Circuits Series Parallel Pros: Retains existing mechanical drive train Cons: Does not allow optimal engine management Pros: Allows optimal engine management Four-Wheel Drive Capable Independent Wheel Torque Control Cons: Hydraulic Efficiency Losses Pump/Motor Operation 26 Hydraulic Accumulators • Energy Storage Device • Oil Compresses a Pre-Charged Gas (Nitrogen) 27 Hydro-Mech w/ Wheel Torque Control Accumulator Planetary Differential Axle Gearbox Engine Clutch Mechanical Transmission • High Efficiency & Decoupling • 2 Power Paths: Mechanical & Hydraulic – Leverage Highly Efficient Mechanical Branch – Infinite Speed Variability with Hydraulic Branch • Independent Wheel Torque Control 28 Hydraulic Transformer Q1 Q2 • Used to change pressure in a power conservative way • Pressure boost or buck is accompanied by proportionate flow decrease and increase • Note: Hydrostatic transmission can be thought of as a mechanical transformer 29 Why Are Pumps Inefficient at Low X? Cs Volumetric: Q xD 1 x Mechanical: T xpD1 Cv x p p 1 x Vr xB 2 C f p x Source: 30http://www.emeraldinsight.com/content_images/fig/0180560404021.png Improving Pump Efficiency • Mechanical: – Variable Displacement Linkage • Low Friction Pin Joints • Volumetric: – Rolling Diaphragm Seal • No Leakage • Minimal Friction 31 Source: www.diacom.com Source: Sandor, G.N. and Erdman, A.G., Advanced Mechanism Design: Analysis and Synthesis, Volume 2, Prentice-Hall, 1984. Linkage Synthesis • Video Video: http://www.youtube.com/watch?v=ovVGkjuXdvE 32 Configuration Analysis Stroke/Footprint Overlapped Case at R1,max 2 1.5 1 0.5 0.24 0 0.22 -0.5 -1 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 0.2 4 Optimized Solution: • R3 = 1.8, R4 = 1.8 • Max Displacement = 2.11 • Footprint = 8.38 • • 0.18 0.16 2.5 0.14 Minimum Transmission Angle of Slider = 56° Minimum Timing Ratio = .72 3 33 2 3 2.5 |R3| Unitless 2 1.5 1.5 |R4| Unitless First Generation Prototype • Variable Pump/Motor – Design Speed: 1750 RPM – Design Flow Rate 2.6e-4 – Design Max Pressure: 6.9 MPa (1000 psi) 34 First Generation Prototype 35 First Generation Prototype 36 Quantifying Energy Loss • Leakage: 6 Δ 3 Δ • Viscous Friction: • Compressibility: Vdead dP ( P) PV dP PdV ( P) dV • Pin Friction: Δ 12 Ecomp ∗ 37 Energy Loss Model Bronze Bushings Rolling Element Bearings System Energy Loss 1800 RPM 6.9 MPa k = 0.173 System Energy Loss 1800 RPM 6.9MPa 18 16 Leakage Viscous Friction Coulomb Friction Compressibility Losses Total Losses 3 14 Energy Loss (J/rev) Energy Loss (J/rev) 2.5 12 10 Leakage Viscous Friction Coulomb Friction Compressibility Losses Total Losses 8 6 4 2 1.5 1 0.5 2 0 k = .0015 3.5 0 0.1 0.2 0.3 0.4 0.5 0.6 Displacement d/dmax 0.7 0.8 0.9 0 0 1 38 0.1 0.2 0.3 0.4 0.5 0.6 Displacement d/dmax 0.7 0.8 0.9 1 Energy Loss Model Efficiency Models at 1800 RPM and 6.9MPa 1 .0015 0.9 0.8 .173 0.7 Efficiency 0.6 0.5 0.4 0.3 0.2 Bronze Bushings Rollerbearings McCandlish Model 0.1 0 0.1 39 0.2 0.3 0.4 0.5 0.6 0.7 Displacement (D/Dmax ) 0.8 0.9 1 Pumping Head Design Outlet -8 Check Valve Fittings Inlet -12 (3/4” ID) Leakage Port -6 40 Experimental Efficiency Testing Optical encoder (not shown) Torque Transducer Accumulator to smooth pulsating flow Pressure Transducer Τ 41 Flow Meter Experimental Efficiency Testing • Results Validate the Model 42 2nd Generation Prototype • • • • • 10kW power output Three cylinder design Linkage Balancing Incorporate roller bearings into design Multi-parameter re-optimization – Include both mechanical and fluid dynamics simultaneously 43 Linkage Preliminary Design • Links in single shear • Rolling element bearings used • Rotary input possibly gear driven or drive shaft can be used Video 44 2 Minute Writing • ½ Sheet of Paper • No Names 1. What do you like most about the way the course is going? 2. What do you like least about the way the course is going? 3. Suggestions for improvement? 45